Swazure: Swarm Measurement of Pose for Flying Light Specks
Pith reviewed 2026-06-25 23:30 UTC · model grok-4.3
The pith
Swazure lets flying light specks measure relative poses by cooperating to fill gaps when individual sensors fall outside their accurate range.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
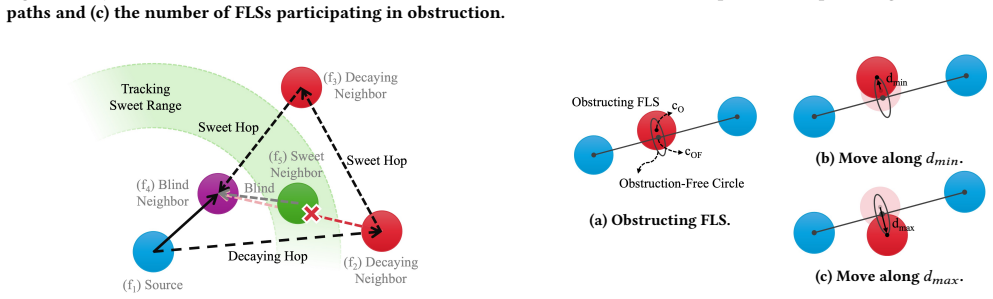
Swazure solves missing sensor data for relative pose in flying light speck swarms through cooperation among the specks. It implements physical data independence by abstracting sensor hardware details so that point cloud data remains independent of specific devices. With medium-sized FLSs the method positions 100 percent of neighbors. Larger sizes introduce obstructions that two heuristics address, and experiments show the Move Obstructing heuristic resolves roughly 30 percent of obstructions in the worst case.
What carries the argument
Swazure, a swarm-cooperation technique that supplies missing relative-pose data and abstracts sensor hardware to achieve physical data independence.
If this is right
- Medium-sized FLSs achieve complete neighbor positioning with Swazure.
- Physical data independence separates point-cloud requirements from any one sensor model.
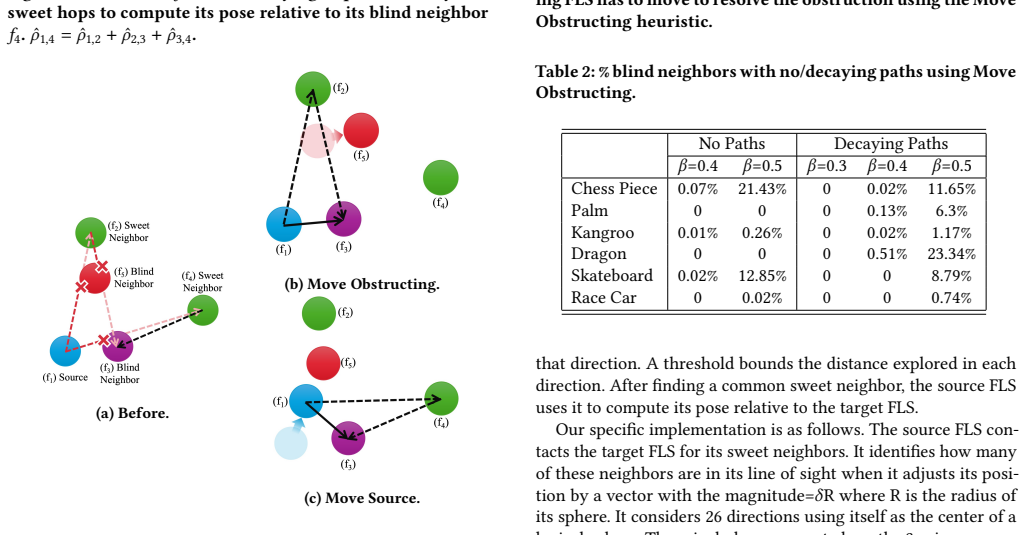
- The Move Obstructing heuristic resolves about 30 percent of obstructions in the worst case and outperforms Move Source.
- FLS swarms can therefore illuminate complex 3D shapes and animated sequences drawn from point clouds.
Where Pith is reading between the lines
- The same cooperation pattern could extend to other swarm tasks that need relative localization when direct sensing is incomplete.
- Obstruction rates might drop further if the heuristics incorporated predictions of future point-cloud motion rather than reacting only to current positions.
- Scaling the approach to thousands of specks would require testing whether communication overhead remains low enough to preserve real-time display updates.
Load-bearing premise
FLSs can share partial sensor readings and combine them into accurate relative-pose values without adding large errors.
What would settle it
A controlled swarm test in which cooperation produces relative-pose errors larger than those obtained from direct sweet-range sensing on the same geometry.
Figures



read the original abstract
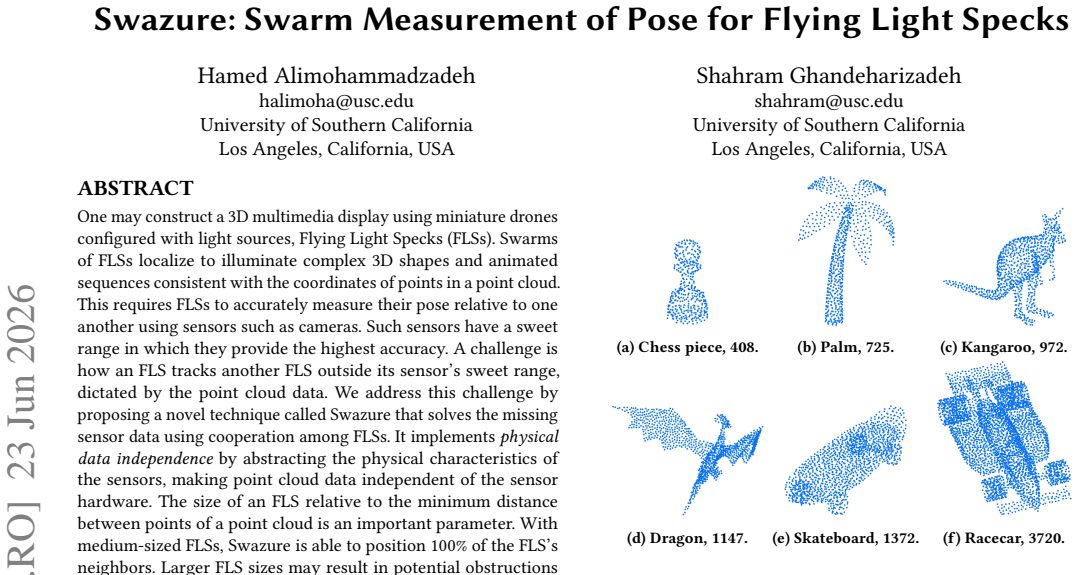
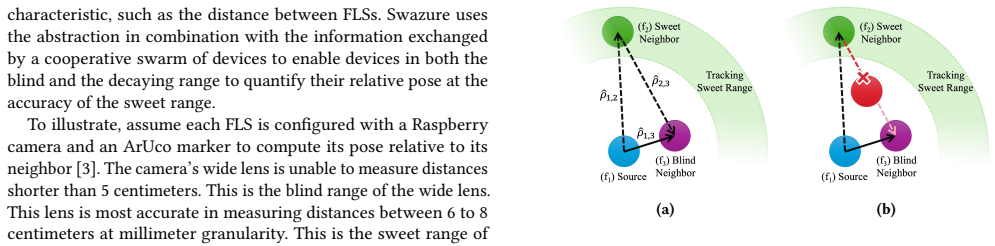
One may construct a 3D multimedia display using miniature drones configured with light sources, Flying Light Specks (FLSs). Swarms of FLSs localize to illuminate complex 3D shapes and animated sequences consistent with the coordinates of points in a point cloud. This requires FLSs to accurately measure their pose relative to one another using sensors such as cameras. Such sensors have a sweet range in which they provide the highest accuracy. A challenge is how an FLS tracks another FLS outside its sensor's sweet range, dictated by the point cloud data. We address this challenge by proposing a novel technique called Swazure that solves the missing sensor data using cooperation among FLSs. It implements physical data independence by abstracting the physical characteristics of the sensors, making point cloud data independent of the sensor hardware. The size of an FLS relative to the minimum distance between points of a point cloud is an important parameter. With medium-sized FLSs, Swazure is able to position 100% of the FLS's neighbors. Larger FLS sizes may result in potential obstructions that prevent Swazure from quantifying relative pose. We present two heuristics, Move Obstructing and Move Source, to address this limitation. Our experimental results show the superiority of the Move Obstructing heuristic which resolves approximately 30% of obstructions in the worst case scenario.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Swazure, a cooperation-based technique for relative pose estimation among Flying Light Specks (FLSs) that abstracts away individual sensor characteristics to achieve physical data independence. It identifies FLS size relative to minimum point-cloud spacing as a key parameter and claims that medium-sized FLSs enable 100% neighbor positioning; two heuristics (Move Obstructing and Move Source) are introduced to mitigate obstructions, with experimental results asserted to show the superiority of Move Obstructing in resolving approximately 30% of obstructions in the worst case.
Significance. If the performance claims hold under rigorous validation, the work would be significant for swarm robotics applications in 3D multimedia displays by providing a sensor-agnostic solution to out-of-range localization via inter-FLS cooperation. The explicit treatment of FLS size as a free parameter and the focus on obstruction resolution heuristics represent practical engineering contributions.
major comments (1)
- [Abstract] Abstract: the claim that Swazure achieves '100% of the FLS's neighbors' positioning for medium sizes and that 'Move Obstructing' resolves 'approximately 30% of obstructions in the worst case scenario' is presented without any description of the experimental setup, sensor models, error bars, dataset, number of trials, or statistical tests, rendering the central performance claims unverifiable and load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting the need for greater verifiability in the abstract. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that Swazure achieves '100% of the FLS's neighbors' positioning for medium sizes and that 'Move Obstructing' resolves 'approximately 30% of obstructions in the worst case scenario' is presented without any description of the experimental setup, sensor models, error bars, dataset, number of trials, or statistical tests, rendering the central performance claims unverifiable and load-bearing for the paper's contribution.
Authors: We agree that the abstract's brevity leaves the central claims without supporting context on methodology, which reduces immediate verifiability. The body of the manuscript (Evaluation section) contains the simulation environment, sensor models, trial counts, and figures with error bars, but the abstract itself does not reference these. We will revise the abstract to add one concise sentence summarizing the validation approach (simulation-based evaluation across FLS size ratios with repeated trials) while preserving length constraints and directing readers to the detailed experimental description. revision: yes
Circularity Check
No significant circularity detected
full rationale
The provided manuscript text (abstract and description) contains no equations, derivations, fitted parameters, or self-citations. The technique is described as a direct engineering response to sensor-range limitations via swarm cooperation, with experimental claims about positioning success and obstruction resolution. No load-bearing step reduces to its own inputs by construction, self-definition, or imported uniqueness. This is the most common honest finding for papers without mathematical derivations.
Axiom & Free-Parameter Ledger
free parameters (1)
- FLS size relative to minimum point-cloud spacing
axioms (1)
- domain assumption Each sensor has a limited sweet range providing highest accuracy.
Reference graph
Works this paper leans on
-
[2]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2023. SwarMer: A Decentralized Localization Framework for Flying Light Specks. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 10–22. https://doi.org/10.61981/ZFSH2302
-
[3]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2024. Swarical: An Integrated Hierarchical Approach to Localizing Flying Light Specks. InACM Multimedia. ACM Press, New York, NY. https://doi.org/10.61981/ZFSH2301
-
[4]
Hamed Alimohammadzadeh, Shuqin Zhu, Jiadong Bai, and Shahram Ghande- harizadeh. 2024. Reliability Groups with Standby Flying Light Specks. InACM Multimedia Systems(Bari, Italy)
2024
-
[5]
Yang Chen, Hamed Alimohammadzadeh, Heather Culbertson, and Shahram Ghandeharizadeh. 2023. Towards a Stable 3D Physical Human-Drone Inter- action. InThe First International Conference on Holodecks(Los Angeles, Cal- ifornia)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 34–37. https: //doi.org/10.61981/ZFSH2308
-
[6]
Yang Chen, Hamed Alimohammadzadeh, Shahram Ghandeharizadeh, and Heather Culbertson. 2024. Force-Feedback Through Touch-based Interactions With A Nanocopter. InIEEE Symposium on Haptics(Long Beach, California) (Haptics ’24). IEEE, Long Beach, CA, USA, 7
2024
-
[7]
C. J. Date and P. Hopewell. 1971. Storage Structure and Physical Data In- dependence. InProceedings of the 1971 ACM SIGFIDET (Now SIGMOD) Work- shop on Data Description, Access and Control(San Diego, California)(SIGFIDET ’71). Association for Computing Machinery, New York, NY, USA, 139–168. https://doi.org/10.1145/1734714.1734725
-
[8]
Shahram Ghandeharizadeh. 2021. Holodeck: Immersive 3D Displays Using Swarms of Flying Light Specks. InACM Multimedia Asia(Gold Coast, Australia). ACM Press, New York, NY, 1–7. https://doi.org/10.1145/3469877.3493698
-
[9]
Shahram Ghandeharizadeh. 2022. Display of 3D Illuminations using Flying Light Specks. InACM Multimedia. ACM Press, New York, NY, 2996–3005. https: //doi.org/10.1145/3503161.3548250
-
[10]
R. Hoogervorst, S. Stramigioli, H. W. Wopereis, and M. Fumagalli. 2015. Vision- IMU based Collaborative Control of a Blind UAV. In2015 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS). 53–61. https: //doi.org/10.1109/RED-UAS.2015.7440990
-
[11]
René Iser and Friedrich M. Wahl. 2010. AntSLAM: Global Map Optimization using Swarm Intelligence. In2010 IEEE International Conference on Robotics and Automation. 265–272. https://doi.org/10.1109/ROBOT.2010.5509254
-
[12]
Miquel Kegeleirs, Giorgio Grisetti, and Mauro Birattari. 2021. Swarm SLAM: Challenges and Perspectives.Frontiers in Robotics and AI8 (2021), 618268
2021
-
[13]
T.D. Larsen, N.A. Andersen, O. Ravn, and N.K. Poulsen. 1998. Incorporation of time delayed measurements in a discrete-time Kalman filter. InProceedings of the 37th IEEE Conference on Decision and Control (Cat. No.98CH36171), Vol. 4. 3972–3977 vol.4. https://doi.org/10.1109/CDC.1998.761918
-
[14]
Mohammed Ayman Shalaby, Charles Champagne Cossette, Jerome Le Ny, and James Richard Forbes. 2024. Multi-robot Relative Pose Estimation and IMU Preintegration Using Passive UWB Transceivers.IEEE Transactions on Robotics 40 (2024), 2410–2429. https://doi.org/10.1109/TRO.2024.3370027
-
[15]
Lucas Teixeira, Fabiola Maffra, Marco Moos, and Margarita Chli. 2018. VI-RPE: Visual-Inertial Relative Pose Estimation for Aerial Vehicles.IEEE Robotics and Automation Letters3, 4 (2018), 2770–2777. https://doi.org/10.1109/LRA.2018. 2837687
-
[16]
Athanasios Tsoukalas, Anthony Tzes, and Farshad Khorrami. 2018. Relative Pose Estimation of Unmanned Aerial Systems. In2018 26th Mediterranean Conference on Control and Automation (MED). 155–160. https://doi.org/10.1109/MED.2018. 8442959
-
[17]
Brian White, Jay Lepreau, Leigh Stoller, Robert Ricci, Shashi Guruprasad, Mac Newbold, Mike Hibler, Chad Barb, and Abhijeet Joglekar. 2002. An Integrated 23 Experimental Environment for Distributed Systems and Networks.SIGOPS Oper. Syst. Rev.36, SI, 255–270. https://doi.org/10.1145/844128.844152
-
[18]
Hao Xu, Peize Liu, Xinyi Chen, and Shaojie Shen. 2024. 𝐷 2SLAM: Decentralized and Distributed Collaborative Visual-Inertial SLAM System for Aerial Swarm. IEEE Transactions on Robotics40 (2024), 3445–3464. https://doi.org/10.1109/TRO. 2024.3422003
work page doi:10.1109/tro 2024
-
[19]
Nima Yazdani, Hamed Alimohammadzadeh, and Shahram Ghandeharizadeh
-
[20]
InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23)
A Conceptual Model of Intelligent Multimedia Data Rendered using Flying Light Specks. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 38–44. https://doi.org/10.61981/ZFSH2309
-
[21]
Zhenbao Yu, Banglei Guan, Shunkun Liang, Zibin Liu, Yang Shang, and Qifeng Yu. 2024. Globally Optimal Solution to the Generalized Relative Pose Estimation Problem using Affine Correspondences.IEEE Transactions on Circuits and Systems for Video Technology(2024), 1–1. https://doi.org/10.1109/TCSVT.2024.3432510
-
[22]
Shipeng Zhong, Yuhua Qi, Zhiqiang Chen, Jin Wu, Hongbo Chen, and Ming Liu. 2024. DCL-SLAM: A Distributed Collaborative LiDAR SLAM Framework for a Robotic Swarm.IEEE Sensors Journal24, 4 (2024), 4786–4797. https: //doi.org/10.1109/JSEN.2023.3345541
-
[23]
Xun S. Zhou and Stergios I. Roumeliotis. 2008. Robot-to-Robot Relative Pose Estimation From Range Measurements.IEEE Transactions on Robotics24, 6 (2008), 1379–1393. https://doi.org/10.1109/TRO.2008.2006251
-
[24]
Shuqin Zhu and Shahram Ghandeharizadeh. 2023. Flight Patterns for Swarms of Drones. InThe First International Conference on Holodecks(Los Angeles, California)(Holodecks ’23). Mitra LLC, Los Angeles, CA, USA, 29–33. https: //doi.org/10.61981/ZFSH2303
-
[25]
Thomas Ziegler, Marco Karrer, Patrik Schmuck, and Margarita Chli. 2021. Dis- tributed Formation Estimation Via Pairwise Distance Measurements.IEEE Ro- botics and Automation Letters6, 2 (2021), 3017–3024. https://doi.org/10.1109/ LRA.2021.3062347 24
arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.