DVL-DeepONet: A Physics-Guided Operator Learning for Resilient Underwater Navigation
Pith reviewed 2026-06-26 08:30 UTC · model grok-4.3
The pith
A physics-guided neural operator estimates AUV velocity from incomplete or noisy DVL beam data by enforcing measurement consistency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
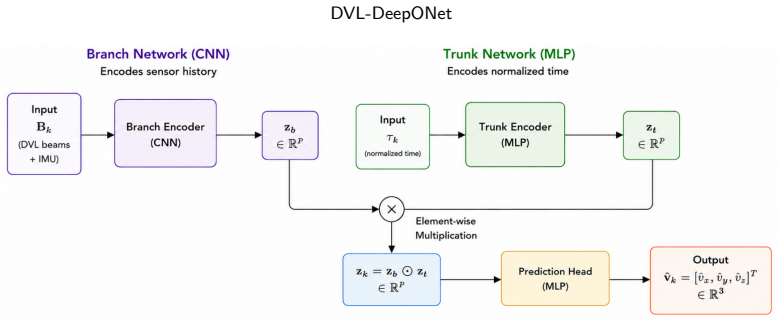
By learning a nonlinear operator that maps temporal inertial and DVL observations directly to vehicle velocity while enforcing a DVL measurement physics consistency constraint, the DVL-DeepONet framework enables robust velocity estimation under multiple degraded sensing scenarios including noise, missing beams, and DVL-only operation, as shown by its validation on approximately 10,000 meters of real-world AUV experiments where it outperforms baselines.
What carries the argument
DVL-DeepONet, a physics-guided deep neural operator that maps temporal inertial/DVL observations to vehicle velocity while enforcing a DVL measurement physics consistency constraint.
If this is right
- Velocity estimates remain usable when DVL beams are lost to marine obstacles or seabed reflections.
- Navigation functions on low-cost platforms that carry only DVL sensors without inertial units.
- Missing individual beam measurements can be recovered while the recovered values still satisfy the physical beam-to-velocity relationship.
- Overall navigation error drops relative to both model-based fusion and other learning methods across the tested real-world paths.
Where Pith is reading between the lines
- The same operator-plus-constraint pattern could be tried on other partial-measurement velocity problems in mobile robotics.
- Adding vehicle dynamics constraints alongside the DVL constraint might further reduce sensitivity to the exact training paths.
- Cross-testing on AUVs with different beam geometries or sensor noise characteristics would reveal how much the learned operator depends on the original hardware.
Load-bearing premise
Enforcing the DVL physics consistency constraint during training on the 10 km dataset will produce models that generalize to unseen marine conditions rather than memorizing dataset-specific patterns.
What would settle it
Apply the trained models to a fresh AUV dataset collected in a different location or under substantially different environmental disturbances and check whether velocity estimation error stays 40 percent lower than the same baselines.
Figures
read the original abstract
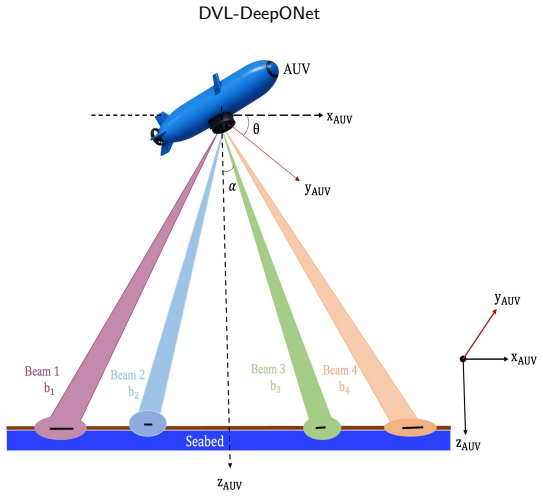
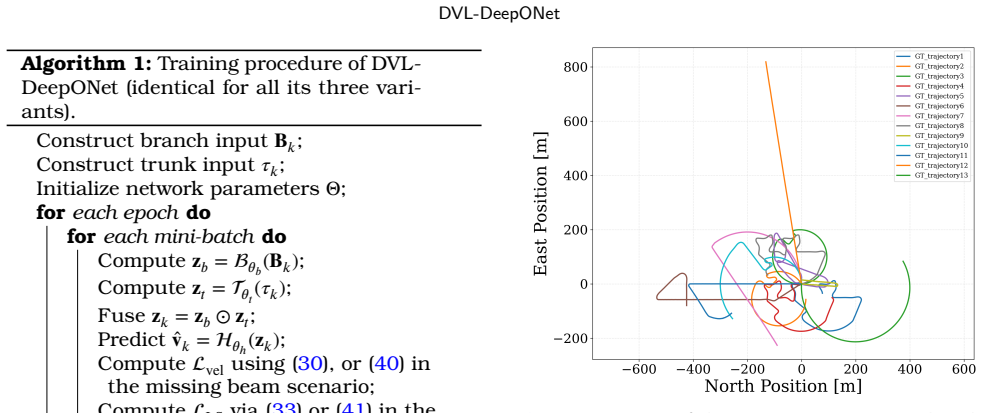
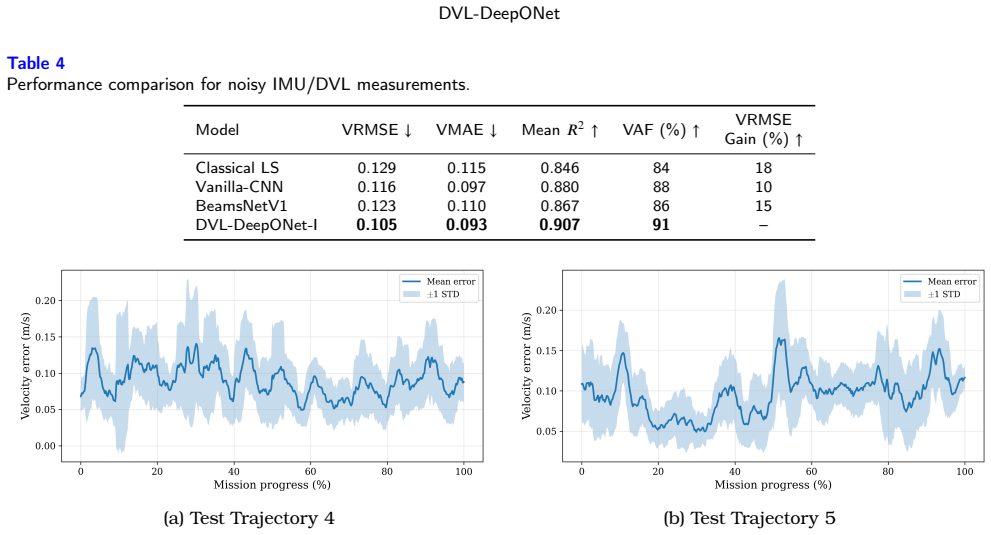
Autonomous Underwater Vehicles (AUVs) rely heavily on the fusion of inertial sensors and Doppler velocity logs (DVLs) for navigation. In standard autonomous navigation systems, the DVL measures four beam velocities, thereby enabling the estimation of the AUV velocity vector. However, during real-world missions, the DVL may receive noisy or incomplete beam measurements due to marine obstacles, seabed reflections, or environmental disturbances. Furthermore, some low-cost underwater platforms operate without inertial sensors to reduce system complexity and cost. In such cases, reliable estimation of the AUV velocity vector in real-world missing beam scenarios becomes challenging, leading to degraded navigation solutions. To circumvent these challenges and enable resilient underwater navigation, we propose DVL-DeepONet, a physics-guided deep neural operator framework along with three variants. The proposed models are designed to estimate DVL-based velocity information under multiple operational scenarios, including (i) noise-resilient estimation in coupled inertial/DVL measurements, (ii) DVL-only learning, and (iii) beam measurement recovery. By learning a nonlinear operator that maps temporal inertial/DVL observations directly to vehicle velocity while enforcing DVL measurement physics through a consistency constraint, the proposed approach enables robust velocity estimation even under degraded sensing conditions. The proposed framework is validated using real-world AUV experiments, comprising a cumulative path length of approximately 10,000 m. Experimental results demonstrate that the proposed DVL-DeepONet architectures outperform baseline model-based approaches and learning-based algorithms by 40%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes DVL-DeepONet, a physics-guided deep neural operator framework (with three variants) for estimating AUV velocity from inertial/DVL data under noisy, incomplete, or DVL-only conditions. It enforces DVL measurement physics via a consistency constraint during training and reports validation on real-world AUV experiments totaling ~10 km path length, claiming 40% outperformance over model-based and learning-based baselines.
Significance. If the physics consistency constraint demonstrably improves generalization beyond the training distribution, the approach could advance resilient navigation for low-cost AUVs. The real-world 10 km dataset provides a concrete testbed, which is a strength. However, the absence of equations, error bars, dataset splits, ablations, or held-out mission results in the provided text prevents assessment of whether gains arise from the operator learning or from dataset-specific fitting.
major comments (2)
- [Abstract] Abstract: the central claim of '40% outperformance' over baselines is load-bearing for the resilient-navigation contribution, yet no quantitative metrics (e.g., RMSE, drift rates), error bars, train/test splits, or ablation results are supplied; without these the claim cannot be evaluated.
- [Abstract] Abstract (and implied methods): the physics consistency constraint is invoked to enable generalization to unseen marine conditions, but no equations, loss formulation, or evidence of held-out missions/different seabeds/OOD disturbances are shown; the 10 km cumulative path on a single distribution does not test the generalization required for the resilience claim.
minor comments (1)
- [Abstract] The abstract mentions 'three variants' but does not name or differentiate them; a brief enumeration would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of '40% outperformance' over baselines is load-bearing for the resilient-navigation contribution, yet no quantitative metrics (e.g., RMSE, drift rates), error bars, train/test splits, or ablation results are supplied; without these the claim cannot be evaluated.
Authors: The 40% outperformance figure is computed from the velocity estimation errors (primarily RMSE) across the full set of real AUV experiments described in the results section. We agree that the abstract would be clearer if it included supporting quantitative details. We will revise the abstract to report the key RMSE values for the proposed variants versus baselines, note the use of cross-validation splits on the 10 km paths, and indicate that error statistics are aggregated over multiple runs. revision: yes
-
Referee: [Abstract] Abstract (and implied methods): the physics consistency constraint is invoked to enable generalization to unseen marine conditions, but no equations, loss formulation, or evidence of held-out missions/different seabeds/OOD disturbances are shown; the 10 km cumulative path on a single distribution does not test the generalization required for the resilience claim.
Authors: The equations and loss formulation for the physics consistency constraint appear in the methods section. The 10 km dataset comprises multiple real missions that include noisy beams, partial beam loss, and varying seabed interactions. We will revise the abstract to reference the constraint explicitly and will add a short paragraph in the experiments section clarifying the train/test partitioning and an ablation isolating the contribution of the physics term. The current data do not include entirely separate missions from different seabeds; any such additional OOD evaluation would require new field trials. revision: partial
Circularity Check
No circularity in derivation chain; physics constraint and empirical validation remain independent
full rationale
The provided abstract and description contain no equations, self-citations, or load-bearing steps that reduce predictions or operators to fitted inputs by construction. The framework is described as learning a nonlinear operator with an added consistency constraint and is validated on real-world 10 km AUV data, with outperformance presented as an empirical result rather than a definitional renaming or self-referential fit. No uniqueness theorems, ansatzes smuggled via prior work, or fitted parameters renamed as predictions appear. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Paull, S
L. Paull, S. Saeedi, M. Seto, H. Li, AUV navigation and localization: A review, IEEE Journal ofOceanic Engineering39 (1)(2013) 131–149
2013
-
[2]
Zhang, H
Y. Zhang, H. Zhang, J. Liu, S. Zhang, Z. Liu, E. Lyu, W. Chen, Submarine pipeline track- ing technology based on AUVs with forward looking sonar, Applied Ocean Research 122 (2022) 103128
2022
-
[3]
Groves, Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, Artech House, UK, 2013
P. Groves, Principles of GNSS, Inertial and Multi-Sensor Integrated Navigation Systems, Artech House, UK, 2013
2013
-
[4]
17, IET, 2004
D.Titterton,J.L.Weston,Strapdowninertial navigation technology, Vol. 17, IET, 2004
2004
-
[5]
Wadoo, Autonomous underwater vehicles: modeling, control design and simulation, CRC press, 2017
S. Wadoo, Autonomous underwater vehicles: modeling, control design and simulation, CRC press, 2017
2017
-
[6]
Braginsky, A
B. Braginsky, A. Baruch, H. Guterman, Cor- rection of DVL error caused by seafloor gra- dient, IEEE Sensors Journal 20 (19) (2020) 11652–11659
2020
-
[7]
J. L. Farrell, GNSS aided navigation & track- ing: inertially augmented or autonomous, American Literary Press Baltimore, Mary- land, 2007
2007
-
[8]
A. K. Sahoo, I. Klein, PiDR: Physics-informed inertial dead reckoning for autonomous platforms, arXiv preprint arXiv:2601.03040 (2026)
Pith/arXiv arXiv 2026
-
[9]
Zhang, D
B. Zhang, D. Ji, S. Liu, X. Zhu, W. Xu, Autonomous underwater vehicle navigation: A review, Ocean Engineering 273 (2023) 113861
2023
-
[10]
D. Wang, X. Xu, Y. Yao, T. Zhang, Y. Zhu, A novel SINS/DVL tightly integrated naviga- tion method for complex environment, IEEE Transactions on Instrumentation and Mea- surement 69 (7) (2019) 5183–5196
2019
-
[11]
Engelsman, I
D. Engelsman, I. Klein, Information-aided inertial navigation: A review, IEEE Transac- tions on Instrumentation and Measurement 72 (2023) 1–18
2023
-
[12]
Cheng, Y
S. Cheng, Y. Wang, Q. Zhao, H. Zhu, X. Qu, A robust INS/USBL/DVL integrated naviga- tion method based on adaptive correlation entropy factor graph optimization, Ocean Engineering 356 (2026) 125234
2026
-
[13]
Zhang, C
H. Zhang, C. Li, T. Zhang, G. Wang, D. Wang, Novel algorithm for the calibration of DVL in underwater integrated navigation system, Ocean Engineering 353 (2026) 124676
2026
-
[14]
Cohen, I
N. Cohen, I. Klein, BeamsNet: A data-driven approach enhancing Doppler velocity log Page 14 of 15 DVL-DeepONet measurements for autonomous underwater vehicle navigation, Engineering Applications of Artificial Intelligence 114 (2022) 105216
2022
-
[15]
Damari, I
G. Damari, I. Klein, ResAlignNet: A data- driven approach for INS/DVL alignment, Ocean Engineering 356 (2026) 125277
2026
-
[16]
Batoš, Ð
M. Batoš, Ð. Nađ, DMIAN: deep learning- based multi-IMU fusion for enhanced ma- rine aided navigation, Control engineering practice 173 (2026) 106991
2026
-
[17]
L. Kang, K. He, J. Zhao, X. Wang, P. Tan, A hybrid-kernel-based adaptive robust Kalman filter for INS/DVL integrated underwater navigation, Ocean Engineering 350 (2026) 124269
2026
-
[18]
H. Mo, H. Yang, Y. Zhang, D. Pan, G. Yang, W. Li, A hybrid physics–data-driven naviga- tion method for AUVs fusing hydrographic information with INS/DVL integration, IEEE Sensors Journal (2026)
2026
-
[19]
Yampolsky, I
Z. Yampolsky, I. Klein, DCNet: A data- driven framework for DVL calibration, Ap- plied Ocean Research 158 (2025) 104525
2025
-
[20]
Zhang, S
F. Zhang, S. Zhao, L. Li, C. Cao, Under- water DVL optimization network (UDON): A learning-based DVL velocity optimizing method for underwater navigation, Drones 9 (1) (2025) 56
2025
-
[21]
Cohen, I
N. Cohen, I. Klein, LiBeamsNet: AUV veloc- ity vector estimation in situations of lim- ited DVL beam measurements, in: OCEANS 2022, Hampton Roads, IEEE, 2022, pp. 1–5
2022
-
[22]
M. Yona, I. Klein, MissBeamNet: Learning missing Doppler velocity log beam measure- ments, Neural Computing and Applications 36 (9) (2024) 4947–4958
2024
-
[23]
Y. Miao, X. Liu, Y. Sun, X. Liu, C. Shen, C. Wang, J. Tang, J. Liu, Physics-guided adaptive UKF for robust AUV integrated navigation under degraded underwater ob- servations, Ocean Engineering 362 (2026) 126542
2026
-
[24]
X. Mu, B. He, X. Zhang, Y. Song, Y. Shen, C. Feng, End-to-end navigation for au- tonomous underwater vehicle with hybrid recurrent neural networks, Ocean Engineer- ing 194 (2019) 106602
2019
-
[25]
Cohen, I
N. Cohen, I. Klein, Seamless underwater navigation with limited Doppler velocity log measurements, IEEE Transactions on Intel- ligent Vehicles (2024)
2024
-
[26]
L. Lu, P. Jin, G. Pang, Z. Zhang, G. E. Karniadakis, Learning nonlinear operators via DeepONet based on the universal ap- proximation theorem of operators, Nature Machine Intelligence 3 (2021) 218–229
2021
-
[27]
Chakraverty, A
S. Chakraverty, A. K. Sahoo, D. Mohapatra, Artficial Neural Networks and Type-2 Fuzzy Set: Elements of Soft Computing and Its Applications, Elsevier, 2025
2025
-
[28]
C. Tan, Y. Cai, H. Wang, L. Chen, Y. Lian, Modeling vehicle dynamics with physics- informed deep operator network, Vehicle System Dynamics (2025) 1–29
2025
-
[29]
N. A. Brokloff, Matrix algorithm for Doppler sonar navigation, in: Proceedings of OCEANS’94, Vol. 3, IEEE, 1994, pp. III–378
1994
-
[30]
P. Liu, B. Wang, Z. Deng, M. Fu, INS/DVL/PS tightly coupled underwater navigation method with limited DVL measurements, IEEE Sensors Journal 18 (7) (2018) 2994–3002
2018
-
[31]
Shurin, A
A. Shurin, A. Saraev, M. Yona, Y. Gutnik, S. Faber, A. Etzion, I. Klein, The autonomous platforms inertial dataset, IEEE Access 10 (2022) 10191–10201
2022
-
[32]
2025 (2023)
ECA Group, A18-D AUV: Autonomous Un- derwater Vehicle,https://www.ecagroup.com/en/so lutions/a18-d-auv-autonomous-underwater-vehicle, accessed: Dec. 2025 (2023)
2025
-
[33]
2025 (2023)
iXblue, PHINS Subsea,https://www.ixblue.c om/store/phins- subsea/, accessed: Dec. 2025 (2023)
2025
-
[34]
2025 (2023)
Teledyne Marine, Doppler Velocity Logs,http s://www.teledynemarine.com/products/product- lin e/navigation-positioning/{Doppler}-velocity-logs, accessed: Dec. 2025 (2023). Page 15 of 15
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.