Ready from Day 1: Population-Aware Coordination for Large-Scale Constrained Multi-Agent Systems
Pith reviewed 2026-05-20 21:37 UTC · model grok-4.3
The pith
Learned primal and dual maps conditioned on compact population summaries let planners coordinate large evolving multi-agent populations without retraining each cycle.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By encoding response-relevant population structure into learned primal and dual maps, the interfaces remain reliable across evolving populations without per-cycle retraining and support coordination of large populations from compact subsamples; in the supply-chain case study these maps reduce forecast error by 16-19% and capacity violations by 20-51% relative to population-unaware baselines under composition shift, and simulator-trained maps reach 11.1% MAPE on real observations.
What carries the argument
Population-aware coordination interfaces: learned primal and dual maps that are conditioned on compact population summaries and queried inside the planner's iterative loop to predict aggregate utilization or required cost trajectories.
If this is right
- The maps support coordination of 500K-agent populations from 20K-agent subsamples without loss of accuracy.
- Simulator-trained primal maps achieve 11.1% MAPE on real observations, outperforming baselines that reach 13-24%.
- No per-cycle retraining is required when population composition changes between planning cycles.
- Capacity violations drop by 20-51% under composition shift compared with population-unaware methods.
Where Pith is reading between the lines
- The same conditioning idea could be applied to other iterative planners that must adapt to changing participant sets, such as traffic signal control or energy demand response.
- Compact summaries might also serve as a privacy mechanism by letting the planner work with aggregate descriptors rather than individual agent data.
- If the summaries can be updated incrementally, the interfaces could support continuous online replanning as agents arrive or depart.
Load-bearing premise
Compact population summaries contain enough information to capture the structure that determines how the population responds to cost signals, so the maps generalize to new compositions without retraining.
What would settle it
A test in which the forecast error of the conditioned maps stays as high as the unconditioned baselines when the population composition is shifted in a way not captured by the chosen summaries would show the claim does not hold.
Figures










read the original abstract
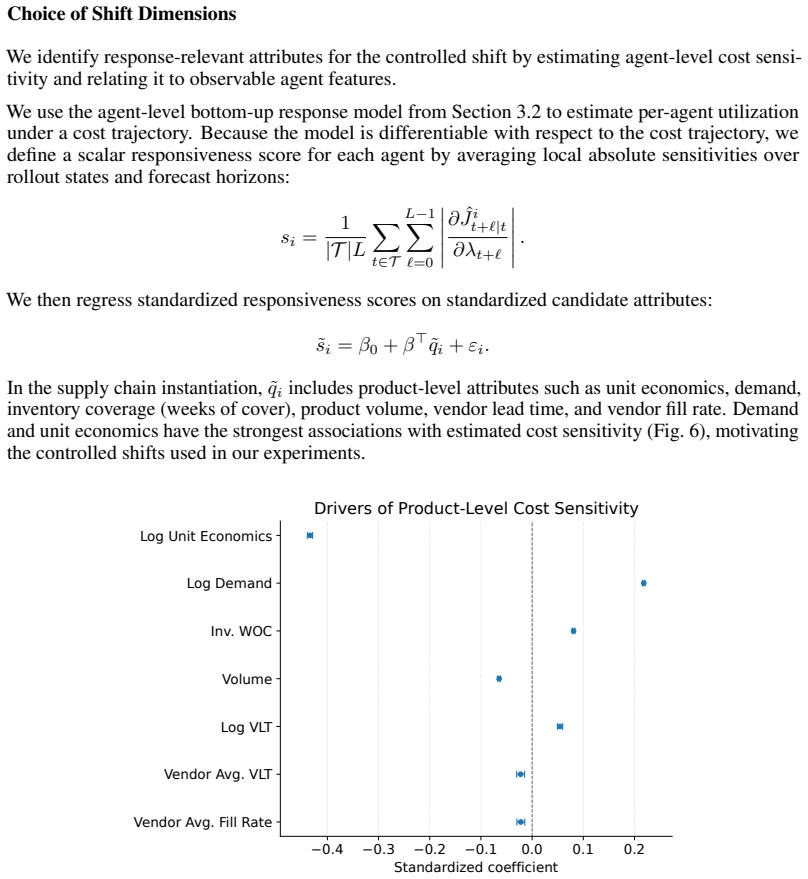
In large-scale multi-agent systems with shared resource constraints, an upstream planner must iteratively evaluate candidate resource plans -- assessing feasibility, aggregate response, and marginal cost -- before committing to one. Lagrangian relaxation separates local decisions through a broadcast cost signal, but the planner still needs the cost-to-utilization response map to explore plan space, and this map depends on population composition that changes across planning cycles. We propose \emph{population-aware coordination interfaces}: learned primal and dual maps, conditioned on compact population summaries, that the planner queries inside its iterative loop. The primal map predicts aggregate utilization under a proposed cost trajectory; the dual map predicts the cost trajectory for a target plan. By encoding response-relevant population structure, these maps remain reliable across evolving populations without per-cycle retraining, and support coordination of large populations from compact subsamples. We additionally cast Sim2Real transfer as a backtestable procedure, enabling evaluation before deployment. In a supply-chain capacity-control case study, population-aware interfaces reduce forecast error by 16--19\% and capacity violations by 20--51\% relative to population-unaware baselines under composition shift; 20K-agent cohorts support accurate coordination of 500K-agent populations; and simulator-trained primal maps achieve 11.1\% MAPE on real observations versus 13--24\% for baselines.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes population-aware coordination interfaces for large-scale constrained multi-agent systems: learned primal maps that predict aggregate utilization from a proposed cost trajectory and dual maps that predict the cost trajectory for a target plan, both conditioned on compact population summaries. These interfaces are intended to allow an upstream planner to explore resource plans iteratively without retraining when population composition changes. The approach is evaluated in a supply-chain capacity-control case study, where it reports 16-19% lower forecast error and 20-51% fewer capacity violations than population-unaware baselines under composition shift, accurate coordination of 500K-agent populations from 20K-agent subsamples, and 11.1% MAPE on real observations for simulator-trained maps.
Significance. If the generalization claims hold, the work could meaningfully improve scalability of Lagrangian-relaxation-based coordination in dynamic MAS by eliminating per-cycle retraining and supporting planning from compact subsamples. The framing of Sim2Real transfer as a backtestable procedure is a constructive practical contribution.
major comments (2)
- Abstract: the central empirical claims rest on concrete percentage improvements (16-19% forecast error, 20-51% capacity violations) yet the abstract supplies no description of the population-summary features, model architecture, training/validation splits, or statistical significance tests. Without these, the reported gains under composition shift cannot be independently verified and the generalization guarantee remains unassessable.
- Abstract (paragraph on population-aware coordination interfaces): the modeling assumption that a low-dimensional population summary is a sufficient statistic for the cost-to-utilization response map is load-bearing for the claim of reliable generalization without retraining. No supporting analysis (ablation on summary dimension, mutual-information bounds, or checks for omitted higher-order interactions) is referenced, leaving the skeptic's concern about cross-agent correlations unaddressed.
minor comments (1)
- Abstract: the phrase 'population-aware coordination interfaces' is introduced as a new term but is not immediately linked to a formal definition or section where the primal/dual maps are mathematically specified.
Simulated Author's Rebuttal
We thank the referee for their detailed and constructive comments. We respond to each major comment below and describe the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: Abstract: the central empirical claims rest on concrete percentage improvements (16-19% forecast error, 20-51% capacity violations) yet the abstract supplies no description of the population-summary features, model architecture, training/validation splits, or statistical significance tests. Without these, the reported gains under composition shift cannot be independently verified and the generalization guarantee remains unassessable.
Authors: We agree that the abstract would benefit from additional context to support independent assessment of the claims. In the revised version we will expand the abstract with a concise description of the population-summary features (low-order moments of agent attributes), the neural architectures for the primal and dual maps, the training/validation splits used in the case study, and a statement that the reported improvements are statistically significant across repeated trials. Full implementation and experimental details will remain in the methods and results sections. revision: yes
-
Referee: Abstract (paragraph on population-aware coordination interfaces): the modeling assumption that a low-dimensional population summary is a sufficient statistic for the cost-to-utilization response map is load-bearing for the claim of reliable generalization without retraining. No supporting analysis (ablation on summary dimension, mutual-information bounds, or checks for omitted higher-order interactions) is referenced, leaving the skeptic's concern about cross-agent correlations unaddressed.
Authors: The empirical generalization results across composition shifts in the supply-chain experiments provide practical support for the utility of the chosen summaries. We acknowledge, however, that explicit ablations on summary dimension and information-theoretic analysis are absent from the current manuscript. We will add an ablation study that varies the dimensionality of the population summary and reports its effect on forecast error and violation rates. Mutual-information bounds and exhaustive checks for higher-order interactions would require additional theoretical development beyond the scope of the present work; the planned ablation will nevertheless directly address sensitivity to summary richness. revision: partial
Circularity Check
No significant circularity; claims rest on empirical validation against external baselines
full rationale
The abstract and described claims present learned primal/dual maps conditioned on population summaries as a modeling choice, with reported performance gains (16-19% forecast error reduction, 20-51% fewer violations) measured against population-unaware baselines in a supply-chain case study. No derivation step reduces a prediction to its own fitted inputs by construction, invokes a self-citation as the sole justification for a uniqueness theorem, or renames an empirical pattern as a derived result. The sufficiency of compact summaries is stated as an assumption that is then tested via generalization metrics on evolving populations and Sim2Real backtesting, rather than being tautological. The work is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- population summary dimension and features
axioms (1)
- domain assumption Learned maps conditioned on population summaries can accurately predict aggregate utilization and required cost trajectories across composition shifts.
invented entities (1)
-
population-aware coordination interfaces
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
population-aware coordination interfaces: learned primal and dual maps, conditioned on compact population summaries... By encoding response-relevant population structure, these maps remain reliable across evolving populations without per-cycle retraining
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The primal map predicts aggregate utilization under a proposed cost trajectory; the dual map predicts the cost trajectory for a target plan.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
CACHON, G. P. (2003). Supply chain coordination with contracts. InHandbooks in Operations Research and Management Science, vol. 11. Elsevier, 227–339
work page 2003
-
[2]
FEDERGRUEN, A. and ZIPKIN, P. H. (1999). Coordination mechanisms for a distribution system with one supplier and multiple retailers.Management science451493–1507
work page 1999
-
[3]
BOYD, S., PARIKH, N., CHU, E., PELEATO, B. and ECKSTEIN, J. (2011). Distributed opti- mization and statistical learning via the alternating direction method of multipliers.Foundations and Trends in Machine Learning31–122
work page 2011
-
[4]
FISHER, M. L. (1981). The lagrangian relaxation method for solving integer programming problems.Management science271–18
work page 1981
-
[5]
LOWE, R., WU, Y., TAMAR, A., HARB, J., ABBEEL, P. and MORDATCH, I. (2017). Multi- agent actor-critic for mixed cooperative-competitive environments. InAdvances in Neural Information Processing Systems, vol. 30
work page 2017
-
[6]
OLIEHOEK, F. A. and AMATO, C. (2016).A Concise Introduction to Decentralized POMDPs. Springer
work page 2016
-
[7]
YANG, Y., LUO, R., LI, M., ZHOU, M., ZHANG, W. and WANG, J. (2018). Mean field multi-agent reinforcement learning. InInternational Conference on Machine Learning. PMLR
work page 2018
-
[8]
BOYD, S. and VANDENBERGHE, L. (2004).Convex Optimization. pt. 1, Cambridge University Press
work page 2004
-
[9]
MAYNE, D. Q., RAWLINGS, J. B., RAO, C. V. and SCOKAERT, P. O. (2000). Constrained model predictive control: Stability and optimality.Automatica36789–814
work page 2000
-
[10]
GARCÍA, C. E., PRETT, D. M. and MORARI, M. (1989). Model predictive control: Theory and practice — A survey.Automatica25335–348
work page 1989
-
[11]
CAMACHO, E. and BORDONS, C. (2004).Model Predictive Control. Advanced Textbooks in Control and Signal Processing, Springer London
work page 2004
-
[12]
EISENACH, C., GHAI, U., MADEKA, D., TORKKOLA, K., FOSTER, D. and KAKADE, S. (2024). Neural coordination and capacity control for inventory management. arXiv:2410.02817
-
[13]
MADEKA, D., TORKKOLA, K., EISENACH, C., LUO, A., FOSTER, D. and KAKADE, S. (2022). Deep inventory management.arXiv:2210.03137
-
[14]
R., VIEIRAFRUJERI, F., CHENG, C.-A., MARSHALL, L., BARBALHO, H
SINCLAIR, S. R., VIEIRAFRUJERI, F., CHENG, C.-A., MARSHALL, L., BARBALHO, H. D. O., LI, J., NEVILLE, J., MENACHE, I. and SWAMINATHAN, A. (2023). Hindsight learning for MDPs with exogenous inputs. InProceedings of the 40th International Conference on Machine Learning, vol. 202 ofProceedings of Machine Learning Research. PMLR
work page 2023
-
[15]
ANDAZ, S., EISENACH, C., MADEKA, D., TORKKOLA, K., JIA, R., FOSTER, D. and KAKADE, S. (2023). Learning an inventory control policy with general inventory arrival dynamics.arXiv:2310.17168
-
[16]
MAGGIAR, A., DICKER, L. and MAHONEY, M. W. (2024). Consensus Planning with Primal, Dual, and Proximal Agents.arXiv:2408.16462
-
[17]
SÄRNDAL, C.-E., SWENSSON, B. and WRETMAN, J. (2003).Model Assisted Survey Sampling. Springer Science & Business Media
work page 2003
-
[18]
HORVITZ, D. G. and THOMPSON, D. J. (1952). A generalization of sampling without replacement from a finite universe.Journal of the American Statistical Association47663–685
work page 1952
-
[19]
RASHID, T., SAMVELYAN, M., SCHROEDER, C., FARQUHAR, G., FOERSTER, J. and WHITE- SON, S. (2018). QMIX: Monotonic value function factorisation for deep multi-agent reinforce- ment learning. InInternational Conference on Machine Learning. PMLR. 10
work page 2018
-
[20]
MOUSA, M.,VAN DEBERG, D., KOTECHA, N.,DELRIO-CHANONA, E. A. and MOWBRAY, M. (2024). An analysis of multi-agent reinforcement learning for decentralized inventory control systems.Computers & Chemical Engineering187108783
work page 2024
-
[21]
BERTSEKAS, D. P. (1999).Nonlinear Programming. Athena scientific
work page 1999
-
[22]
GIJSBRECHTS, J., BOUTE, R. N., VANMIEGHEM, J. A. and ZHANG, D. J. (2022). Can deep reinforcement learning improve inventory management? performance on lost sales, dual- sourcing, and multi-echelon problems.Manufacturing & Service Operations Management24 1349–1368
work page 2022
-
[23]
HYNDMAN, R. J., AHMED, R. A., ATHANASOPOULOS, G. and SHANG, H. L. (2011). Optimal combination forecasts for hierarchical time series.Computational statistics & data analysis55 2579–2589
work page 2011
-
[24]
WICKRAMASURIYA, S. L., ATHANASOPOULOS, G. and HYNDMAN, R. J. (2019). Optimal forecast reconciliation for hierarchical and grouped time series through trace minimization. Journal of the American Statistical Association114804–819
work page 2019
-
[25]
ZAHEER, M., KOTTUR, S., RAVANBAKHSH, S., POCZOS, B., SALAKHUTDINOV, R. and SMOLA, A. (2017). Deep sets. InAdvances in Neural Information Processing Systems, vol. 30
work page 2017
-
[26]
VASWANI, A., SHAZEER, N., PARMAR, N., USZKOREIT, J., JONES, L., GOMEZ, A. N., KAISER, L. and POLOSUKHIN, I. (2017). Attention is all you need. InAdvances in Neural Information Processing Systems, vol. 30
work page 2017
-
[27]
SHIMODAIRA, H. (2000). Improving predictive inference under covariate shift by weighting the log-likelihood function.Journal of Statistical Planning and Inference90227–244
work page 2000
-
[28]
BEN-DAVID, S., BLITZER, J., CRAMMER, K. and PEREIRA, F. (2006). Analysis of rep- resentations for domain adaptation. InAdvances in Neural Information Processing Systems, vol. 19
work page 2006
-
[29]
QUINONERO-CANDELA, J., SUGIYAMA, M., SCHWAIGHOFER, A. and LAWRENCE, N. D. (2009).Dataset Shift in Machine Learning. MIT Press
work page 2009
-
[30]
Distributionally robust optimization: A review
RAHIMIAN, H. and MEHROTRA, S. (2019). Distributionally robust optimization: A review. arXiv:1908.05659
-
[31]
SAGAWA, S., KOH, P. W., HASHIMOTO, T. B. and LIANG, P. (2020). Distributionally robust neural networks for group shifts: On the importance of regularization for worst-case generalization. InInternational Conference on Learning Representations
work page 2020
-
[32]
W., SAGAWA, S., MARKLUND, H., XIE, S
KOH, P. W., SAGAWA, S., MARKLUND, H., XIE, S. M., ZHANG, M., BALSUBRAMANI, A., HU, W., YASUNAGA, M., PHILLIPS, R. L., GAO, I.ET AL. (2021). WILDS: A benchmark of in-the-wild distribution shifts. InInternational Conference on Machine Learning. PMLR
work page 2021
-
[33]
AMOS, B. and KOLTER, J. Z. (2017). Optnet: Differentiable optimization as a layer in neural networks. InProceedings of the 34th International Conference on Machine Learning, vol. 70 of Proceedings of Machine Learning Research. PMLR
work page 2017
-
[34]
AGRAWAL, A., AMOS, B., BARRATT, S., BOYD, S., DIAMOND, S. and KOLTER, J. Z. (2019). Differentiable convex optimization layers. InAdvances in Neural Information Processing Systems, vol. 32
work page 2019
-
[35]
SUH, H. J., SIMCHOWITZ, M., ZHANG, K. and TEDRAKE, R. (2022). Do differentiable simulators give better policy gradients? InInternational Conference on Machine Learning. PMLR
work page 2022
-
[36]
PARMAS, P., SENO, T. and AOKI, Y. (2023). Model-based reinforcement learning with scalable composite policy gradient estimators. InProceedings of the International Conference on Machine Learning
work page 2023
-
[37]
ALVO, M., RUSSO, D. and KANORIA, Y. (2023). Neural inventory control in networks via hindsight differentiable policy optimization.arXiv:2306.11246. 11
-
[38]
JAKOBI, N., HUSBANDS, P. and HARVEY, I. (1995). Evolutionary robotics and the radical envelope-of-noise hypothesis.Adaptive behavior6325–368
work page 1995
-
[39]
TOBIN, J., FONG, R., RAY, A., SCHNEIDER, J., ZAREMBA, W. and ABBEEL, P. (2017). Domain randomization for transferring deep neural networks from simulation to the real world. In2017 IEEE/RSJ international conference on intelligent robots and systems (IROS)
work page 2017
-
[40]
B., ANDRYCHOWICZ, M., ZAREMBA, W
PENG, X. B., ANDRYCHOWICZ, M., ZAREMBA, W. and ABBEEL, P. (2018). Sim-to-real transfer of robotic control with dynamics randomization. In2018 IEEE International Conference on Robotics and Automation (ICRA)
work page 2018
-
[41]
TAN, J., ZHANG, T., COUMANS, E., ISCEN, A., BAI, Y., HAFNER, D., BOHEZ, S. and VANHOUCKE, V. (2018). Sim-to-real: Learning agile locomotion for quadruped robots. In Robotics: Science and Systems
work page 2018
-
[42]
NAGABANDI, A., KAHN, G., FEARING, R. S. and LEVINE, S. (2018). Neural network dynamics for model-based deep reinforcement learning with model-free fine-tuning. In2018 IEEE International Conference on Robotics and Automation (ICRA). 12 A Related Work Multi-Agent Learning and Coordination.Centralized-training decentralized-execution methods such as MADDPG [...
work page 2018
-
[43]
19 2.ϕθpredicts a cost trajectory ˆλt:t+L =ϕθ(xt,St,Gt:t+L)
A capacity pathG 0:T∼PG is sampled from the truncated Haar wavelet distribution. 19 2.ϕθpredicts a cost trajectory ˆλt:t+L =ϕθ(xt,St,Gt:t+L)
-
[44]
The fixed local policies respond toˆλt:t+L in the differentiable Exo-IDP simulator, producing simulated aggregate inboundJt
-
[45]
Gradients flow through the simulator response to updateϕθby minimizing Eq. (10). Ldual(θ) =αquad ∑ t>tburn ( Jt−Gt )2 + +αℓ1 ∑ t ∥ˆλt∥1 +αmseLmse,(10) where (u)+ = max(u,0) , and the capacity-violation sum is restricted to steps after a burn-in of 6 to exclude simulator warm-up. Lmse is a forecast-consistency regularizer that penalizes disagreement betwee...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.