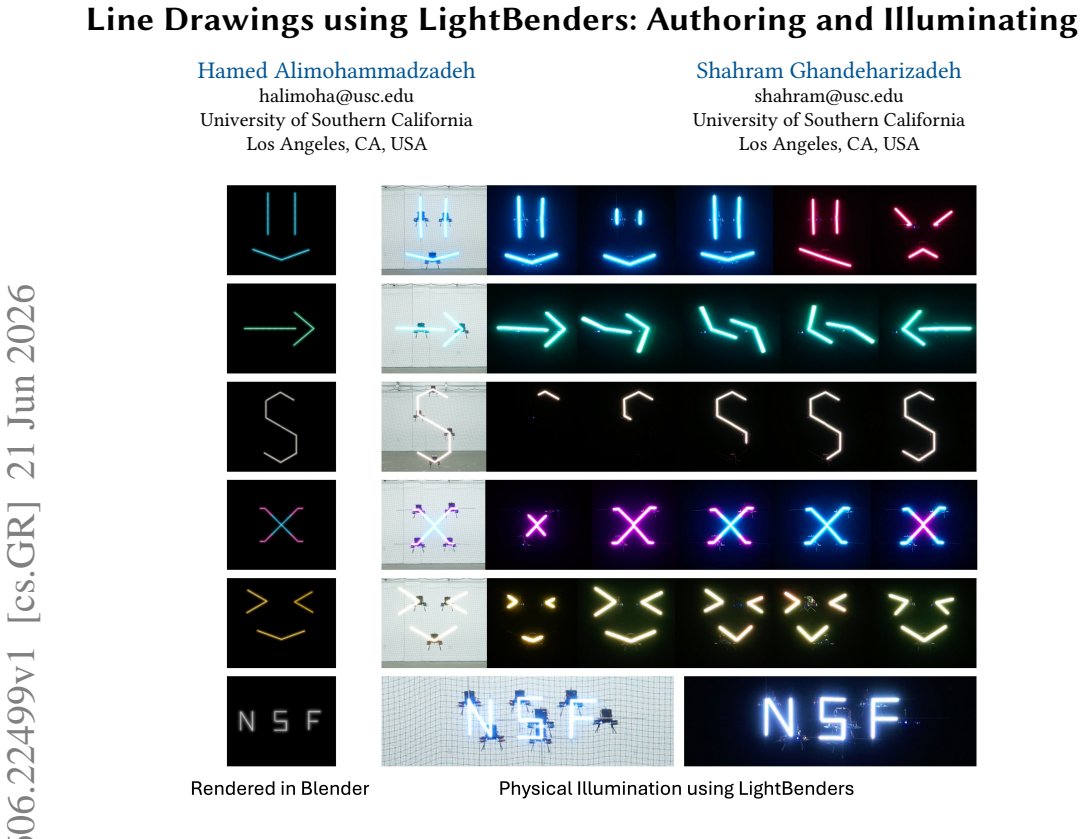
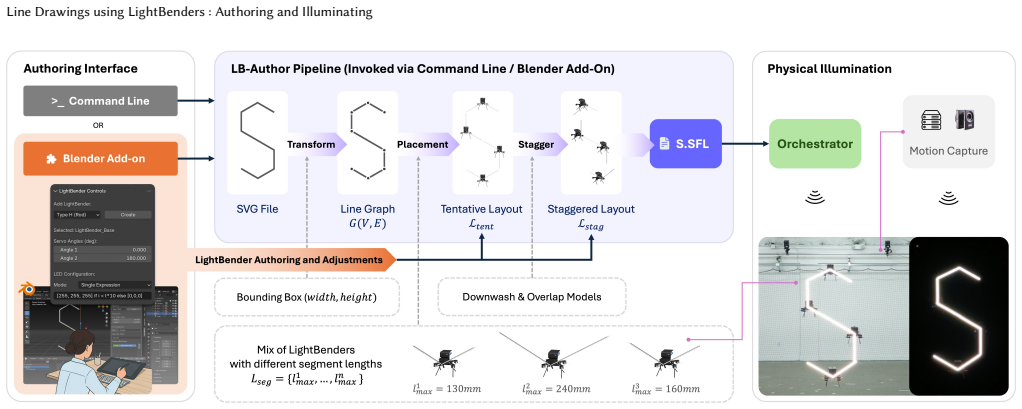
Line Drawings using LightBenders: Authoring and Illuminating
Pith reviewed 2026-06-26 09:41 UTC · model grok-4.3
The pith
A drone-based LightBender system illuminates line drawings and letterforms in mid-air with misalignment users rate as high quality.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
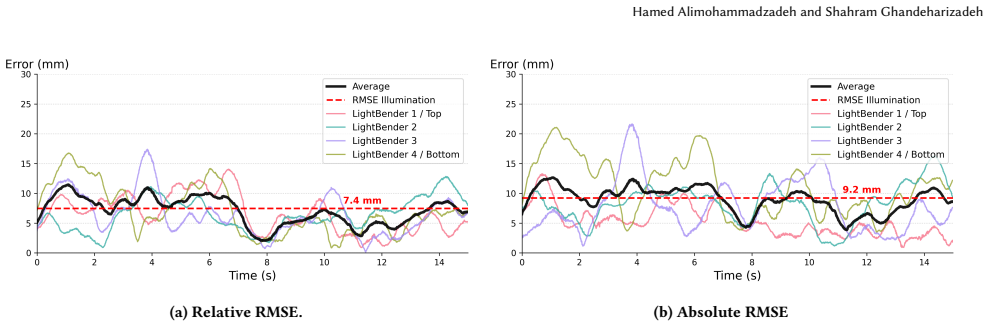
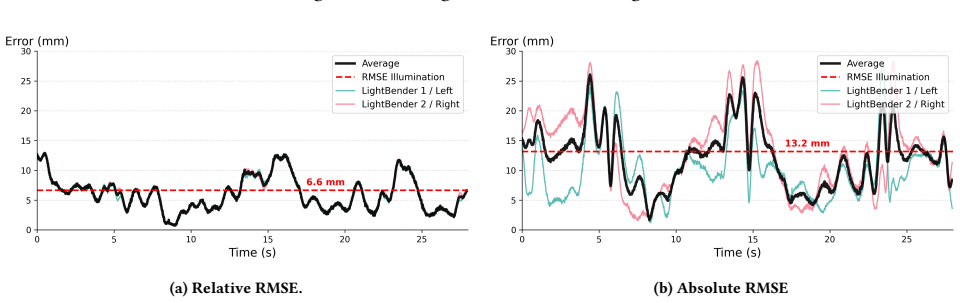
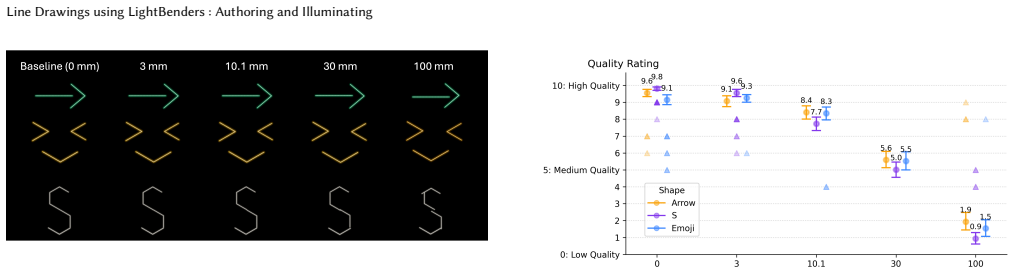
The LightBender system, built from servo-actuated rod joints and a dense addressable LED strip mounted on a drone, together with algorithms that compute minimum swarm size, stagger formations, and produce Swarm Flight and Lighting files, allows users to author and render line drawings and letterforms as mid-air illuminations indoors; a human-subject study confirms that the resulting 10.1 mm maximum misalignment remains perceptually acceptable with a median quality rating of 8 out of 10.
What carries the argument
LightBender: a drone carrying servo-actuated rod joints and a dense addressable LED strip that permits arbitrary orientation for targeted illumination, paired with Swarm Flight and Lighting (SFL) planning algorithms.
If this is right
- Users can register drones, draw or animate graphics inside Blender, and launch the swarm through single-button commands.
- Vector files imported from SVG can be turned directly into illuminated drawings without manual redrawing.
- The system automatically calculates the smallest number of LightBenders required for any given line drawing.
- Staggered flight paths reduce the risk that one drone's downwash disturbs the others during illumination.
Where Pith is reading between the lines
- The same planning approach might support temporary outdoor light installations if weather-protected drones are substituted.
- Adding external position sensors could shrink the observed misalignment further and widen the range of usable drawings.
- The authoring pipeline could be adapted to control other mobile light sources such as ground robots or handheld devices.
Load-bearing premise
The servo hardware, LED strip, and planning software can repeatedly position the drones and light the drawings at the stated accuracy inside ordinary rooms without collisions or excessive airflow interference.
What would settle it
A flight test in a furnished indoor space that records actual drone positions during simultaneous operation and shows either misalignment exceeding 10.1 mm on average or median user quality ratings dropping below 7 on the 0-10 scale.
Figures

read the original abstract
This study presents the hardware and software architecture of a transformative system for illuminating line drawings and letterforms. These mid-air illuminations are indoors and might be animated. The hardware contribution is a drone equipped with servo-actuated rod joints and a dense, addressable LED strip that enables arbitrary orientation, a LightBender. The software contributions are threefold. First, the system implements algorithms and heuristics to estimate the minimum number of LightBenders required to render a line drawing or letterform, stagger swarm formations to mitigate LightBender downwash, generate Swarm Flight and Lighting (SFL) files, and execute these files using a swarm of LightBenders to illuminate line drawings and letterforms. Second, a Blender add-on enables users to register LightBenders, author graphics and animations represented by swarms of LightBenders, and deploy the swarm for illumination through one-click functions. Third, users may import SVG files into either the Blender add-on or a standalone LB-Author tool to illuminate line drawings directly from vector graphics. We present results from an IRB-approved human subject study (n=21) to evaluate the impact of LightBender misalignment on the perceived illuminations. Obtained results demonstrate that the system's 10.1 mm maximum misalignment is perceptually acceptable across tested illuminations, with a median quality rating of 8 on a 0-10 scale.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents LightBenders, a drone-based system with servo-actuated rod joints and dense addressable LED strips for mid-air illumination of line drawings and letterforms indoors, potentially animated. Software contributions include algorithms to estimate the minimum number of LightBenders, stagger swarm formations to reduce downwash, generate Swarm Flight and Lighting (SFL) files, a Blender add-on for authoring and deployment, and SVG import for direct vector graphics illumination. An IRB-approved human-subject study (n=21) reports that the system's 10.1 mm maximum misalignment yields a median quality rating of 8 on a 0-10 scale and is perceptually acceptable.
Significance. If the positioning accuracy claim is substantiated, the system could enable new forms of dynamic aerial graphics and animations in computer graphics applications. The combination of custom hardware, swarm planning heuristics, and authoring tools represents a practical system-building contribution, though the absence of hardware validation currently limits its demonstrated impact.
major comments (1)
- [Abstract] Abstract: The manuscript asserts that the system achieves a 10.1 mm maximum misalignment that is perceptually acceptable, yet no calibration procedure, motion-capture validation, error statistics, or indoor flight test protocol is described to confirm that the physical drone + servo + LED hardware and SFL/stagger algorithms actually attain this accuracy. The human-subject study therefore evaluates tolerance to an assumed error value rather than the error produced by the implemented system.
minor comments (1)
- [Abstract] Abstract: No details are provided on the human-subject study design, statistical analysis methods, or exact measurement of the 10.1 mm misalignment figure.
Simulated Author's Rebuttal
We thank the referee for identifying the unsubstantiated claim in the abstract regarding the 10.1 mm misalignment. We agree that the manuscript as written does not describe the required validation and will revise to correct this.
read point-by-point responses
-
Referee: [Abstract] Abstract: The manuscript asserts that the system achieves a 10.1 mm maximum misalignment that is perceptually acceptable, yet no calibration procedure, motion-capture validation, error statistics, or indoor flight test protocol is described to confirm that the physical drone + servo + LED hardware and SFL/stagger algorithms actually attain this accuracy. The human-subject study therefore evaluates tolerance to an assumed error value rather than the error produced by the implemented system.
Authors: We agree that the current manuscript does not include any description of a calibration procedure, motion-capture validation, error statistics, or indoor flight test protocol that would confirm the physical system attains 10.1 mm maximum misalignment. The human-subject study evaluates perceptual tolerance to illuminations containing up to this misalignment value rather than measuring the error of the deployed hardware and algorithms. In the revised manuscript we will (1) edit the abstract to state that the study evaluates tolerance to a 10.1 mm misalignment and (2) insert a new section that reports the preliminary calibration experiments, motion-capture protocol, error statistics, and indoor flight tests used to establish the 10.1 mm figure. revision: yes
Circularity Check
No circularity; empirical systems paper with no derivation chain
full rationale
The manuscript describes a drone-based hardware platform, planning algorithms, authoring tools, and an IRB human-subject study (n=21) evaluating perceptual tolerance to 10.1 mm misalignment. No equations, fitted parameters, predictions derived from subsets of data, or load-bearing self-citations appear in the provided text. The central claim rests on the reported study results rather than any self-referential reduction. This is a standard non-circular empirical systems report.
Axiom & Free-Parameter Ledger
invented entities (1)
-
LightBender
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2025. Illuminating English Letters Using a Flying Light Speck. InProceedings of the 3rd International Workshop on UA Vs in Multimedia: Capturing the World from a New Perspective Line Drawings using LightBenders : Authoring and Illuminating (Dublin, Ireland)(UA VM ’25). Association for Computing Machinery...
-
[2]
Hamed Alimohammadzadeh and Shahram Ghandeharizadeh. 2026. Indoor Drone Visual Effects Using LightBenders. InProceedings of the Special Interest Group on Computer Graphics and Interactive Techniques Conference Posters (SIGGRAPH Posters ’26)(Los Angeles, California, USA)(SIGGRAPH Posters ’26). Association for Computing Machinery, New York, NY, USA. doi:10.1...
-
[3]
Hamed Alimohammadzadeh, Shuqin Zhu, Jiadong Bai, and Shahram Ghan- deharizadeh. 2024. Reliability Groups with Standby Flying Light Specks. In Proceedings of the 15th ACM Multimedia Systems Conference(Bari, Italy)(MM- Sys ’24). Association for Computing Machinery, New York, NY, USA, 1–11. doi:10.1145/3625468.3647606
-
[4]
Hamed Alimohammadzadeh, Shuqin Zhu, and Shahram Ghandeharizadeh. 2026. Techniques to Conceal Dark Standby Flying Light Specks.ACM Trans. Multimedia Comput. Commun. Appl.22, 3, Article 70 (Feb. 2026), 26 pages. doi:10.1145/ 3724399
2026
-
[5]
Oscar Kin-Chung Au, Chiew-Lan Tai, Hung-Kuo Chu, Daniel Cohen-Or, and Tong-Yee Lee. 2008. Skeleton Extraction by Mesh Contraction.ACM transactions on graphics (TOG)27, 3 (2008), 1–10
2008
-
[6]
Austin, Patrick. 2018. A Record-Breaking Drone Show Ended With Quadcopters Falling from the Sky. Accessed June 19, 2026. [Online]., https://gizmodo.com/a- record-breaking-drone-show-ended-with-quadcopters-fal-1825745673
2018
-
[7]
Jorge Cardoso and Rui José. 2012. PuReWidgets: a programming toolkit for interactive public display applications. InProceedings of the 4th ACM SIGCHI Symposium on Engineering Interactive Computing Systems(Copenhagen, Den- mark)(EICS ’12). Association for Computing Machinery, New York, NY, USA, 51–60. doi:10.1145/2305484.2305496
-
[8]
Yotam Erel, Or Kozlovsky-Mordenfeld, Daisuke Iwai, Kosuke Sato, and Amit H. Bermano. 2024. Casper DPM: Cascaded Perceptual Dynamic Projection Mapping onto Hands. InSIGGRAPH Asia 2024 Conference Papers(Tokyo, Japan)(SA ’24). Association for Computing Machinery, New York, NY, USA, Article 137, 10 pages. doi:10.1145/3680528.3687624
-
[9]
Milton Friedman. 1937. The Use of Ranks to Avoid the Assumption of Normality Implicit in the Analysis of Variance.J. Amer. Statist. Assoc.32, 200 (1937), 675–701. arXiv:https://www.tandfonline.com/doi/pdf/10.1080/01621459.1937.10503522 doi:10.1080/01621459.1937.10503522
-
[10]
Shahram Ghandeharizadeh. 2021. Holodeck: Immersive 3D Displays Using Swarms of Flying Light Specks. InACM Multimedia Asia(Gold Coast, Australia). ACM Press, New York, NY, 1–7. doi:10.1145/3469877.3493698
-
[11]
Shahram Ghandeharizadeh. 2022. Display of 3D Illuminations using Flying Light Specks. InACM Multimedia. ACM Press, New York, NY, 2996–3005. doi:10.1145/ 3503161.3548250
arXiv 2022
-
[12]
Antonio Gomes, Calvin Rubens, Sean Braley, and Roel Vertegaal. 2016. Bit- Drones: Towards Using 3D Nanocopter Displays as Interactive Self-Levitating Programmable Matter. InProceedings of the 2016 CHI Conference on Human Factors in Computing Systems(San Jose, California, USA)(CHI ’16). Association for Com- puting Machinery, New York, NY, USA, 770–780. doi...
-
[13]
Yuito Hirohashi and Hiromasa Oku. 2025. Aerial Display Method Using a Flying Screen and Long Range Dynamic Projection Mapping.IEEE Access13 (2025), 62893–62902. doi:10.1109/ACCESS.2025.3557000
-
[14]
Hui-Ching Hsieh, Gene Eu Jan, and He-Lin Luo. 2023. The Applications and Presentations of Drones in Staged Performances and Contemporary Art. In 2023 IEEE International Conference on e-Business Engineering (ICEBE). 281–286. doi:10.1109/ICEBE59045.2023.00052
-
[15]
Roman Ibrahimov, Nikolay Zherdev, and Dzmitry Tsetserukou. 2020. DroneLight: Drone Draws in the Air using Long Exposure Light Painting and ML.CoRR abs/2007.15171 (2020). arXiv:2007.15171 https://arxiv.org/abs/2007.15171
arXiv 2020
-
[16]
International Olympic Committee. 2020. Spectacular Intel Drone Light Show Helps Bring Tokyo 2020 to Life. Accessed June 19, 2026. [On- line]., https://olympics.com/ioc/news/spectacular-intel-drone-light-show-helps- bring-tokyo-2020-to-life-1
2020
-
[17]
Masatoshi Iuchi, Yuito Hirohashi, and Hiromasa Oku. 2023. Proposal for an Aerial Display using Dynamic Projection Mapping on a Distant Flying Screen. In2023 IEEE Conference Virtual Reality and 3D User Interfaces (VR). 603–608. doi:10.1109/VR55154.2023.00075
-
[18]
JS Bin. [n. d.]. JS Bin Snippet: nacirij. https://output.jsbin.com/nacirij Accessed June 19, 2026
2026
-
[19]
Yuta Kageyama, Daisuke Iwai, and Kosuke Sato. 2024. Efficient Distortion-Free Neural Projector Deblurring in Dynamic Projection Mapping.IEEE Transactions on Visualization and Computer Graphics30, 12 (2024), 7544–7557. doi:10.1109/ TVCG.2024.3354957
arXiv 2024
-
[20]
Richard M. Karp. 1972.Reducibility among Combinatorial Problems. Springer US, Boston, MA, 85–103. doi:10.1007/978-1-4684-2001-2_9
-
[21]
Jee-Seon Kim. 2010. Within-Subjects Design. InEncyclopedia of Research Design. SAGE Publications, Inc., Thousand Oaks, California, 1639–1644. doi:10.4135/ 9781412961288.n503
2010
-
[22]
Cheng Lin, Lingjie Liu, Changjian Li, Leif Kobbelt, Bin Wang, Shiqing Xin, and Wenping Wang. 2020. SEG-MAT: 3D Shape Segmentation using Medial Axis Transform.IEEE transactions on visualization and computer graphics28, 6 (2020), 2430–2444
2020
-
[23]
Ragavendra Lingamaneni, Thomas Kubitza, and Jürgen Scheible. 2017. DroneCAST: Towards a Programming Toolkit for Airborne Multimedia Dis- play Applications. InProceedings of the 19th International Conference on Human- Computer Interaction with Mobile Devices and Services(Vienna, Austria)(Mobile- HCI ’17). Association for Computing Machinery, New York, NY, ...
-
[24]
CollMot Robotics Ltd. 2026. Skybrush Software. https://skybrush.io/ Accessed June 19, 2026
2026
-
[25]
Jiaxin Lu, Yongqing Liang, Huijun Han, Jiacheng Hua, Junfeng Jiang, Xin Li, and Qixing Huang. 2025. A Survey on Computational Solutions for Reconstructing Complete Objects by Reassembling their Fractured Parts. InComputer Graphics Forum, Vol. 44. Wiley Online Library, e70081
2025
-
[26]
Lumasky Drone Shows. 2023. 1,500 Drone Show to Illuminate the Story of Khaybar. Accessed June 19, 2026. [Online]., https://lumasky.show/projects/1500- drone-show-to-illuminate-the-story-of-khaybar/
2023
-
[27]
H. B. Mann and D. R. Whitney. 1947. On a Test of Whether one of Two Random Variables is Stochastically Larger than the Other.The Annals of Mathematical Statistics18, 1 (1947), 50 – 60. doi:10.1214/aoms/1177730491
-
[28]
Takashi Nomoto, Wanlong Li, Hao-Lun Peng, and Yoshihiro Watanabe. 2022. Dynamic Multi-projection Mapping Based on Parallel Intensity Control.IEEE Transactions on Visualization and Computer Graphics28, 5 (2022), 2125–2134. doi:10.1109/TVCG.2022.3150488
-
[29]
Michael Norman, Vince Kellen, Shava Smallen, Brian DeMeulle, Shawn Strande, Ed Lazowska, Naomi Alterman, Rob Fatland, Sarah Stone, Amanda Tan, Katherine Yelick, Eric Van Dusen, and James Mitchell. 2021. CloudBank: Managed Services to Simplify Cloud Access for Computer Science Research and Education. In Practice and Experience in Advanced Research Computin...
-
[30]
Hiroki Nozaki. 2014. Flying Display: A Movable Display Pairing Projector and Screen in the Air. InCHI ’14 Extended Abstracts on Human Factors in Computing Systems(Toronto, Ontario, Canada)(CHI EA ’14). Association for Computing Machinery, New York, NY, USA, 909–914. doi:10.1145/2559206.2579410
-
[31]
Seungyong Oh, Sungchul Kang, Kyungjoon Lee, Sangchul Ahn, and Euntai Kim
-
[32]
In2006 IEEE/RSJ International Conference on Intelligent Robots and Systems
Flying Display: Autonomous Blimp with Real-Time Visual Tracking and Image Projection. In2006 IEEE/RSJ International Conference on Intelligent Robots and Systems. 131–136. doi:10.1109/IROS.2006.281919
-
[33]
Hao-Lun Peng and Yoshihiro Watanabe. 2021. High-Speed Dynamic Projection Mapping onto Human Arm with Realistic Skin Deformation.Applied Sciences 11, 9 (2021). doi:10.3390/app11093753
-
[34]
James Preiss, Wolfgang Hoenig, Nora Ayanian, and Gaurav Sukhatme. 2017. Downwash-Aware Trajectory Planning for Large Quadcopter Teams.IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)(04 2017), 8
2017
-
[35]
Rui SV Rodrigues, José FM Morgado, and Abel JP Gomes. 2018. Part-Based Mesh Segmentation: A Survey. InComputer Graphics Forum, Vol. 37. Wiley Online Library, 235–274
2018
-
[36]
Jürgen Scheible, Achim Hoth, Julian Saal, and Haifeng Su. 2013. Display- drone: a flying robot based interactive display. InProceedings of the 2nd ACM International Symposium on Pervasive Displays(Mountain View, California) (PerDis ’13). Association for Computing Machinery, New York, NY, USA, 49–54. doi:10.1145/2491568.2491580
-
[37]
Jürgen Scheible, Ragavendra Lingamaneni, and Markus Funk. 2019. DisplayDrone as Police Deployment Tool for Ubiquitously Available Public Displays and Digital Signage. https://api.semanticscholar.org/CorpusID:198353689
2019
-
[38]
Stefan Schneegass and Florian Alt. 2014. SenScreen: A Toolkit for Supporting Sensor-enabled Multi-Display Networks. InProceedings of The International Sym- posium on Pervasive Displays(Copenhagen, Denmark)(PerDis ’14). Association for Computing Machinery, New York, NY, USA, 92–97. doi:10.1145/2611009. 2611017
-
[39]
Stefan Schneegass, Florian Alt, Jürgen Scheible, and Albrecht Schmidt. 2014. Midair Displays: Concept and First Experiences with Free-Floating Pervasive Displays. InProceedings of The International Symposium on Pervasive Displays (Copenhagen, Denmark)(PerDis ’14). Association for Computing Machinery, New York, NY, USA, 27–31. doi:10.1145/2611009.2611013
-
[40]
Stefan Schneegass, Florian Alt, Jürgen Scheible, Albrecht Schmidt, and Haifeng Su. 2014. Midair displays: exploring the concept of free-floating public displays. InCHI ’14 Extended Abstracts on Human Factors in Computing Systems(Toronto, Ontario, Canada)(CHI EA ’14). Association for Computing Machinery, New York, NY, USA, 2035–2040. doi:10.1145/2559206.2581190
-
[41]
Valerii Serpiva, Ekaterina Karmanova, Aleksey Fedoseev, Stepan Perminov, and Dzmitry Tsetserukou. 2021. DronePaint: Swarm Light Painting with DNN-based Gesture Recognition. InACM SIGGRAPH 2021 Emerging Technologies(Virtual Event, USA)(SIGGRAPH ’21). Association for Computing Machinery, New York, NY, USA, Article 6, 4 pages. doi:10.1145/3450550.3465349
-
[42]
Sky Elements Drone Shows. 2023. Sky Elements Ignites the NCAA Mens Final Four with an Electrifying Texas Drone Light Show! Accessed June 19, 2026. Hamed Alimohammadzadeh and Shahram Ghandeharizadeh [Online]., https://skyelementsdrones.com/drone-events/sky-elements-ignites- the-ncaa-mens-final-four-with-an-electrifying-texas-drone-light-show/
2023
-
[43]
SPH Engineering. 2024. The Growing Trend of Integrated Drones and Fire- works Shows., https://www.droneshowsoftware.com/news/the-growing-trend- of-integrated-drones-and-fireworks-shows. Accessed June 19, 2026
2024
-
[44]
SPH Engineering. 2026. Drone Show Software. https://www.droneshowsoftware. com/ Accessed June 19, 2026
2026
-
[45]
Yao Su, Chi Chu, Meng Wang, Jiarui Li, Liu Yang, Yixin Zhu, and Hangxin Liu
-
[46]
In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Downwash-aware Control Allocation for Over-actuated UAV Platforms. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 10478–10485. doi:10.1109/IROS47612.2022.9981140
-
[47]
Gail M. Sullivan and Anthony R. Jr. Artino. 2013. Analyzing and Interpreting Data From Likert-Type Scales.Journal of Graduate Medical Education5, 4 (Dec. 2013), 541–542. doi:10.4300/JGME-5-4-18
-
[48]
Hiroaki Tobita, Shigeaki Maruyama, and Takuya Kuzi. 2011. Floating Avatar: Telepresence System using Blimps for Communication and Entertainment. In CHI ’11 Extended Abstracts on Human Factors in Computing Systems(Vancouver, BC, Canada)(CHI EA ’11). Association for Computing Machinery, New York, NY, USA, 541–550. doi:10.1145/1979742.1979625
-
[49]
Daiki Tone, Daisuke Iwai, Shinsaku Hiura, and Kosuke Sato. 2020. FibAR: Em- bedding Optical Fibers in 3D Printed Objects for Active Markers in Dynamic Projection Mapping.IEEE Transactions on Visualization and Computer Graphics 26, 5 (2020), 2030–2040. doi:10.1109/TVCG.2020.2973444
-
[50]
Verge Aero. 2026. Design Studio Software. https://www.verge.aero/studio Accessed June 19, 2026
2026
-
[51]
Verity Studios and ETH Zurich and Cirque du Soleil. 2016. SPARKED: A Live Interaction Between Humans and Quadcopters. Accessed June 19, 2026. [Online]., https://starts-prize.aec.at/en/sparked/
2016
-
[52]
Pauli Virtanen, Ralf Gommers, Travis E. Oliphant, Matt Haberland, Tyler Reddy, David Cournapeau, Evgeni Burovski, Pearu Peterson, Warren Weckesser, Jonathan Bright, Stéfan J. van der Walt, Matthew Brett, Joshua Wilson, K. Jar- rod Millman, Nikolay Mayorov, Andrew R. J. Nelson, Eric Jones, Robert Kern, Eric Larson, C J Carey, İlhan Polat, Yu Feng, Eric W. ...
-
[53]
Brian White, Jay Lepreau, Leigh Stoller, Robert Ricci, Shashi Guruprasad, Mac Newbold, Mike Hibler, Chad Barb, and Abhijeet Joglekar. 2002. An Integrated Experimental Environment for Distributed Systems and Networks.SIGOPS Oper. Syst. Rev.36, SI, 255–270. doi:10.1145/844128.844152
-
[54]
Frank Wilcoxon. 1945. Individual Comparisons by Ranking Methods.Biometrics Bulletin1, 6 (1945), 80–83. http://www.jstor.org/stable/3001968
arXiv 1945
-
[55]
Wataru Yamada, Kazuhiro Yamada, Hiroyuki Manabe, and Daizo Ikeda. 2017. iSphere: Self-Luminous Spherical Drone Display. InProceedings of the 30th Annual ACM Symposium on User Interface Software and Technology(Québec City, QC, Canada)(UIST ’17). Association for Computing Machinery, New York, NY, USA, 635–643. doi:10.1145/3126594.3126631
-
[56]
Nima Yazdani and Shahram Ghandeharizadeh. 2025. Integration of 3D FLS Displays with 3D Authoring Tools. InProceedings of the Third ACM International Workshop on Interactive Extended Reality(Dublin, Ireland)(IXR ’25). ACM Press, New York, NY, 8 pages. doi:10.1145/3746269.3760418
-
[57]
Hyung-Jin Yoon, Wenbin Wan, Hunmin Kim, Naira Hovakimyan, Lui Sha, and Petros G. Voulgaris. 2019. Towards Resilient UAV: Escape Time in GPS Denied Environment with Sensor Drift.IFAC-PapersOnLine52, 12 (2019), 423–428. doi:10.1016/j.ifacol.2019.11.280 21st IFAC Symposium on Automatic Control in Aerospace ACA 2019
-
[58]
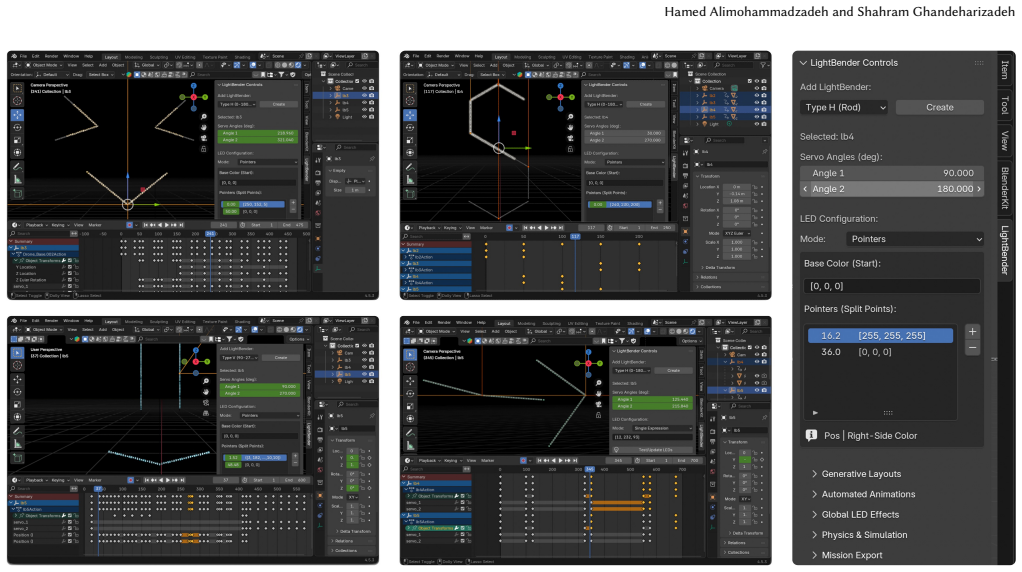
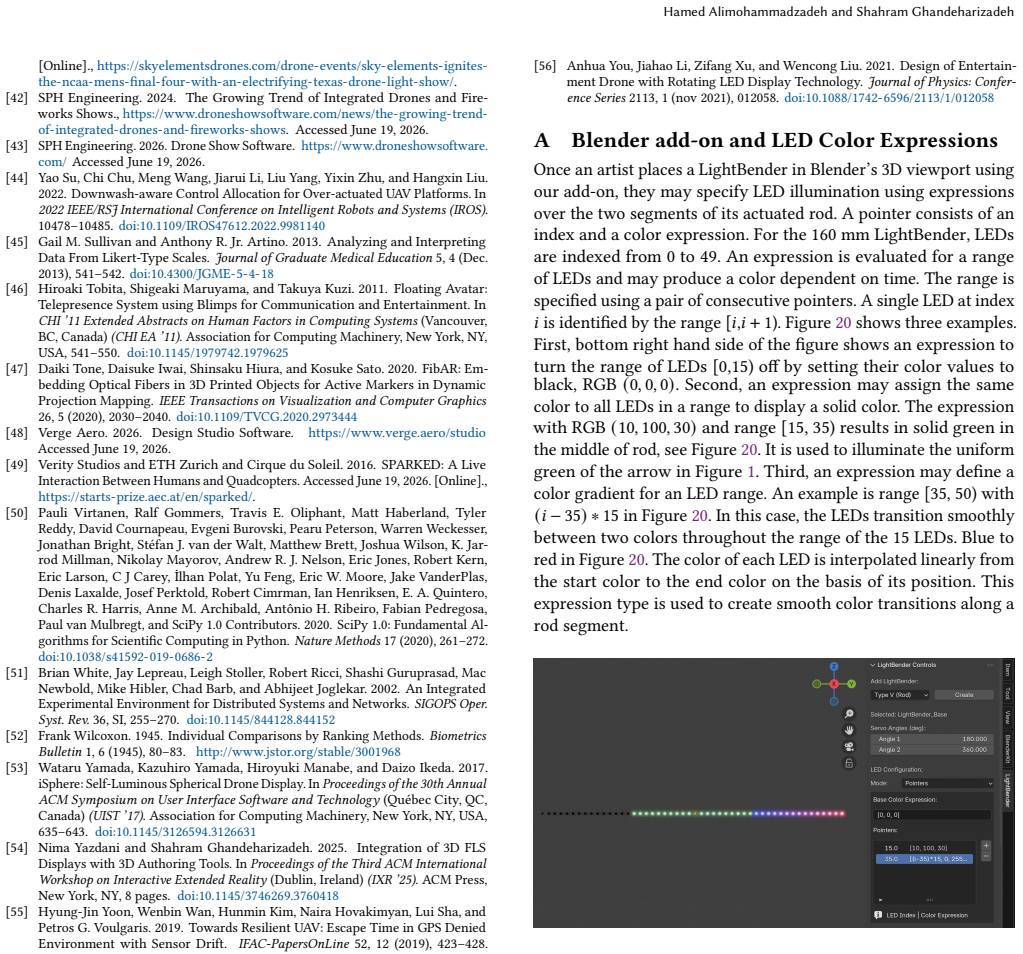
Anhua You, Jiahao Li, Zifang Xu, and Wencong Liu. 2021. Design of Entertain- ment Drone with Rotating LED Display Technology.Journal of Physics: Confer- ence Series2113, 1 (nov 2021), 012058. doi:10.1088/1742-6596/2113/1/012058 A Blender add-on and LED Color Expressions Once an artist places a LightBender in Blender’s 3D viewport using our add-on, they ma...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.