Design and Performance Evaluation of Secure RF and WiFi-Based Communication in Drone Swarms via Testbed Implementation
Pith reviewed 2026-06-26 03:57 UTC · model grok-4.3
The pith
MAVShield delivers MAVLink encryption for UAV swarms that matches unencrypted performance on a four-drone testbed while resisting key-recovery attacks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
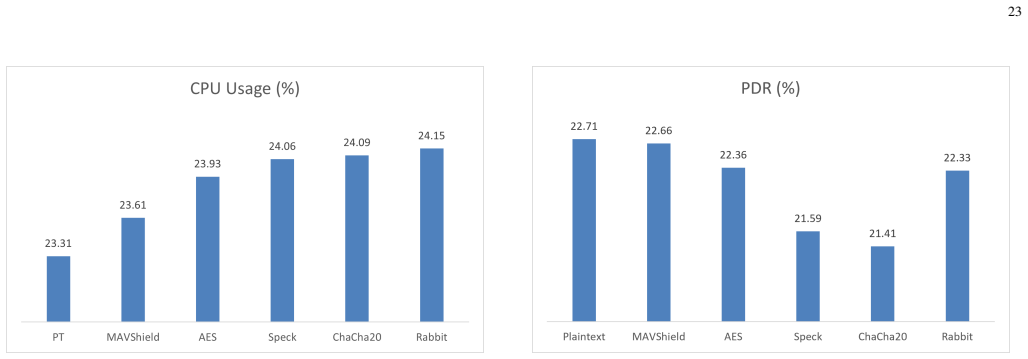
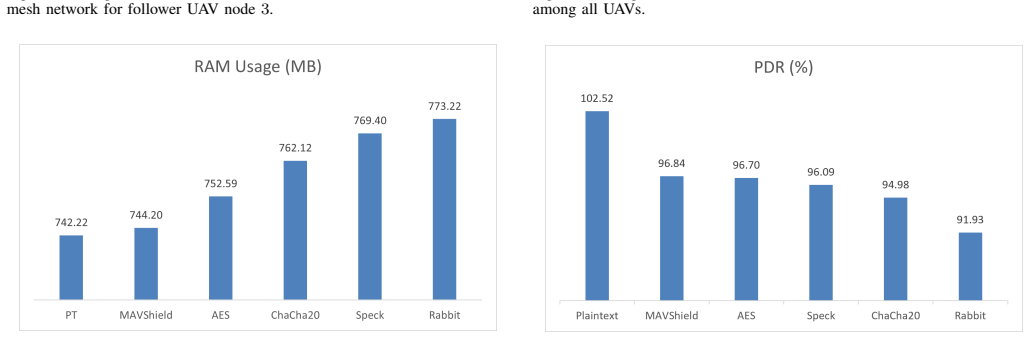
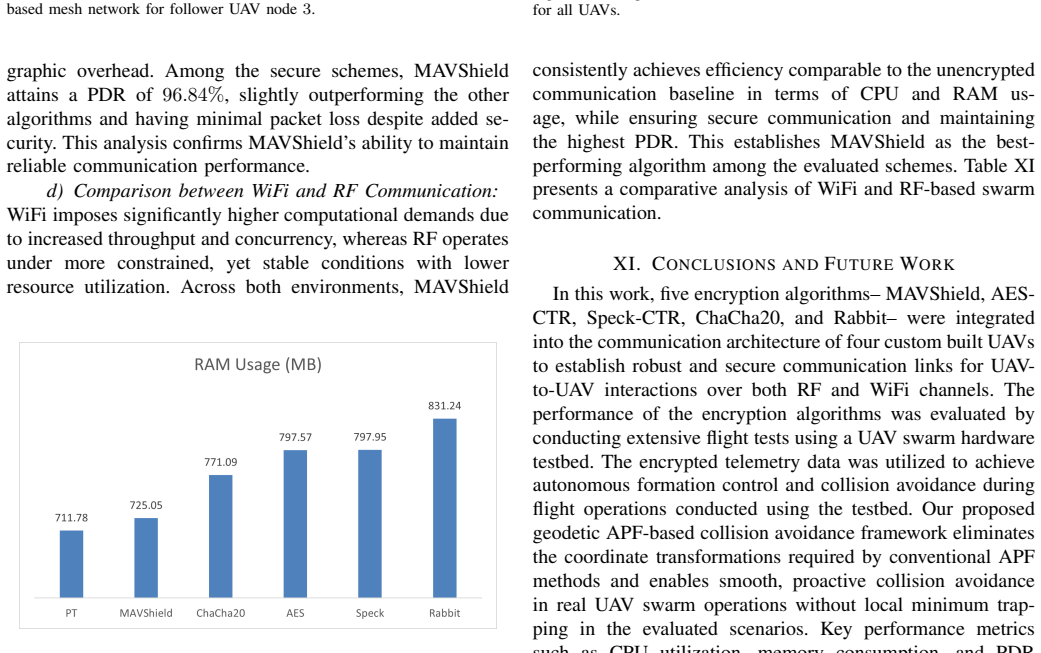
MAVShield provides lightweight encryption for MAVLink messages that, when implemented on four UAVs, achieves CPU utilization, memory consumption, and packet delivery ratios comparable to unencrypted communication and superior to AES-CTR, Speck-CTR, ChaCha20, and Rabbit, while algebraic cryptanalysis and Wireshark traffic analysis establish resistance to key-recovery attacks and confidentiality of telemetry data.
What carries the argument
MAVShield lightweight encryption framework for MAVLink, which adds confidentiality to integrity and authentication already present in the protocol.
If this is right
- Secure MAVLink links become feasible for real-time formation control without dedicated hardware accelerators.
- The modified geodetic APF algorithm reduces trajectory oscillations compared with Cartesian versions.
- MAVShield can replace heavier ciphers when both efficiency and confidentiality are required.
- Wireshark-based analysis provides a practical method to verify confidentiality in deployed systems.
Where Pith is reading between the lines
- The same encryption layer could be applied to other MAVLink-based multi-agent systems beyond aerial vehicles.
- If the four-drone results hold, operators could adopt MAVShield as a default for mixed RF-WiFi swarms rather than relying on AES alone.
- Extending the testbed to eight or more UAVs would directly test the scalability claim left implicit in the current evaluation.
Load-bearing premise
The four-UAV testbed and chosen flight scenarios capture the security threats, timing constraints, and scaling behavior of larger operational drone swarms.
What would settle it
A successful key-recovery attack against MAVShield on a larger swarm or a measurable drop in packet delivery ratio below unencrypted levels under realistic interference.
Figures
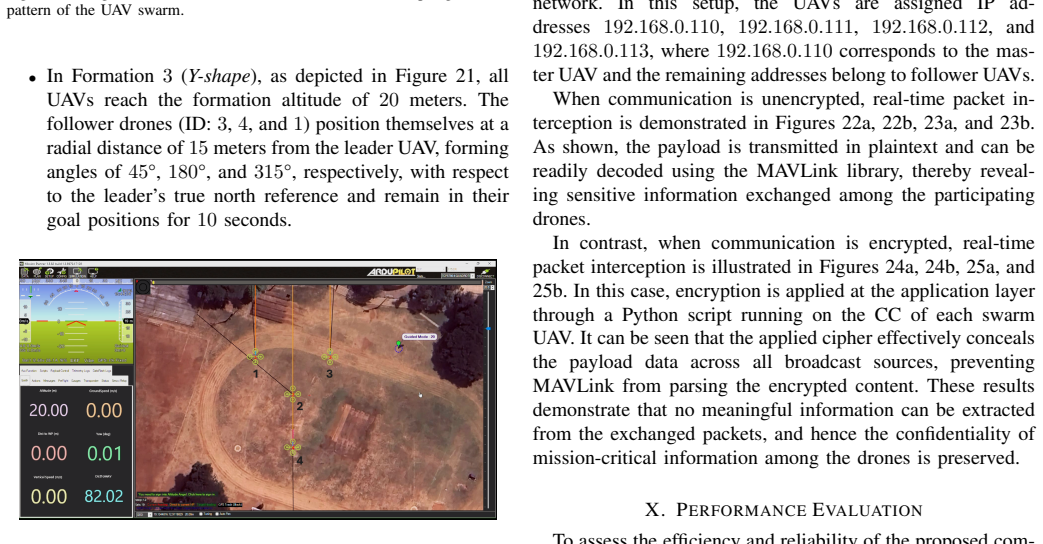
read the original abstract
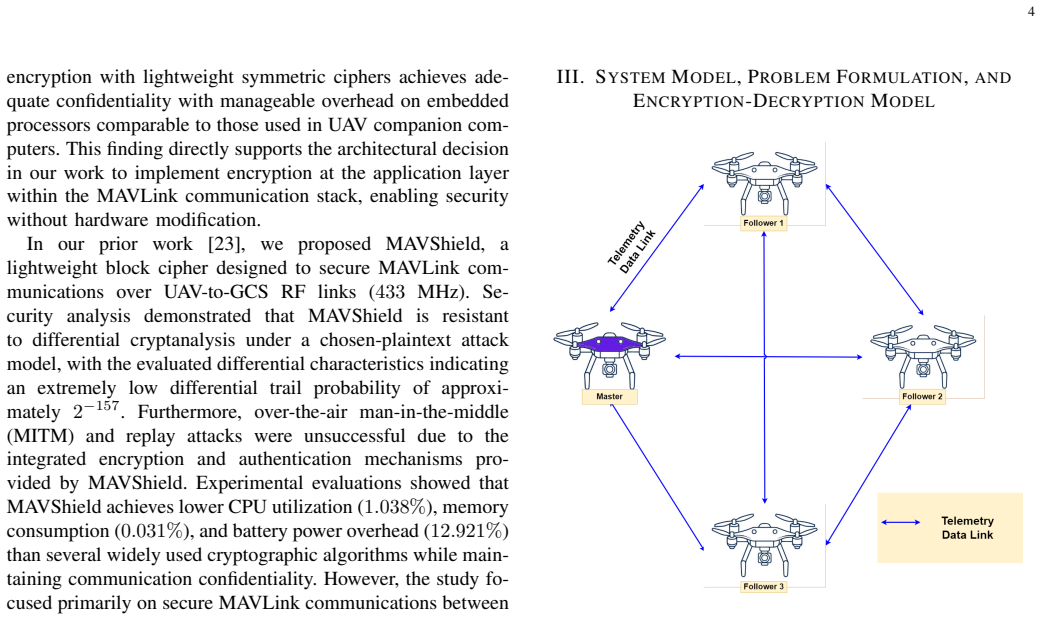
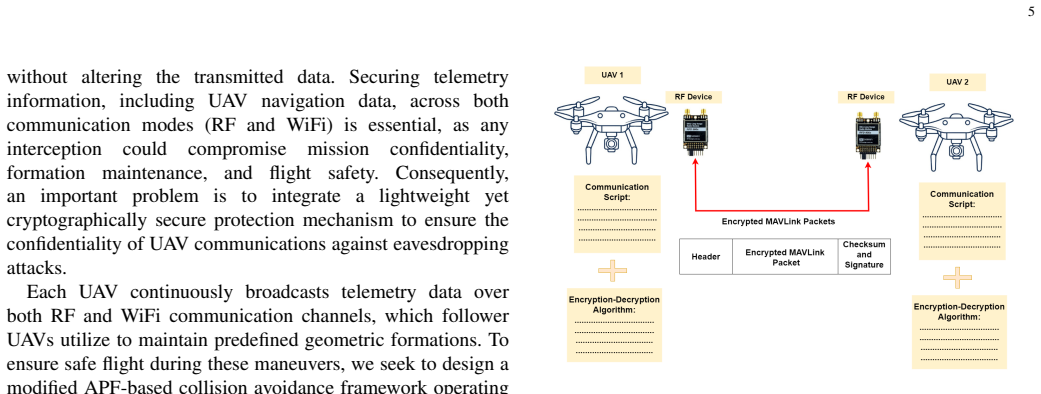
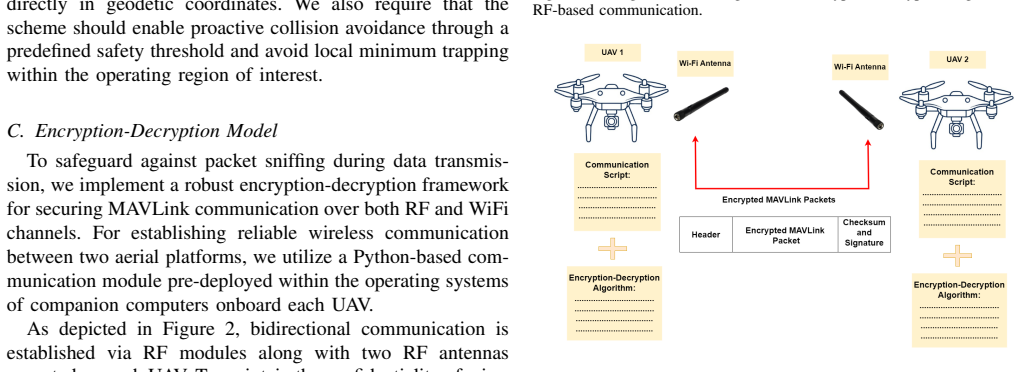
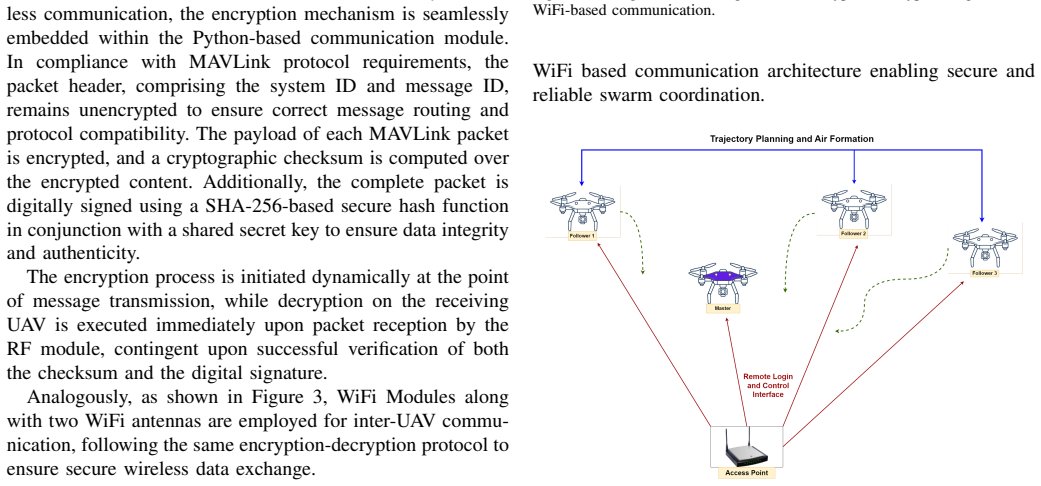
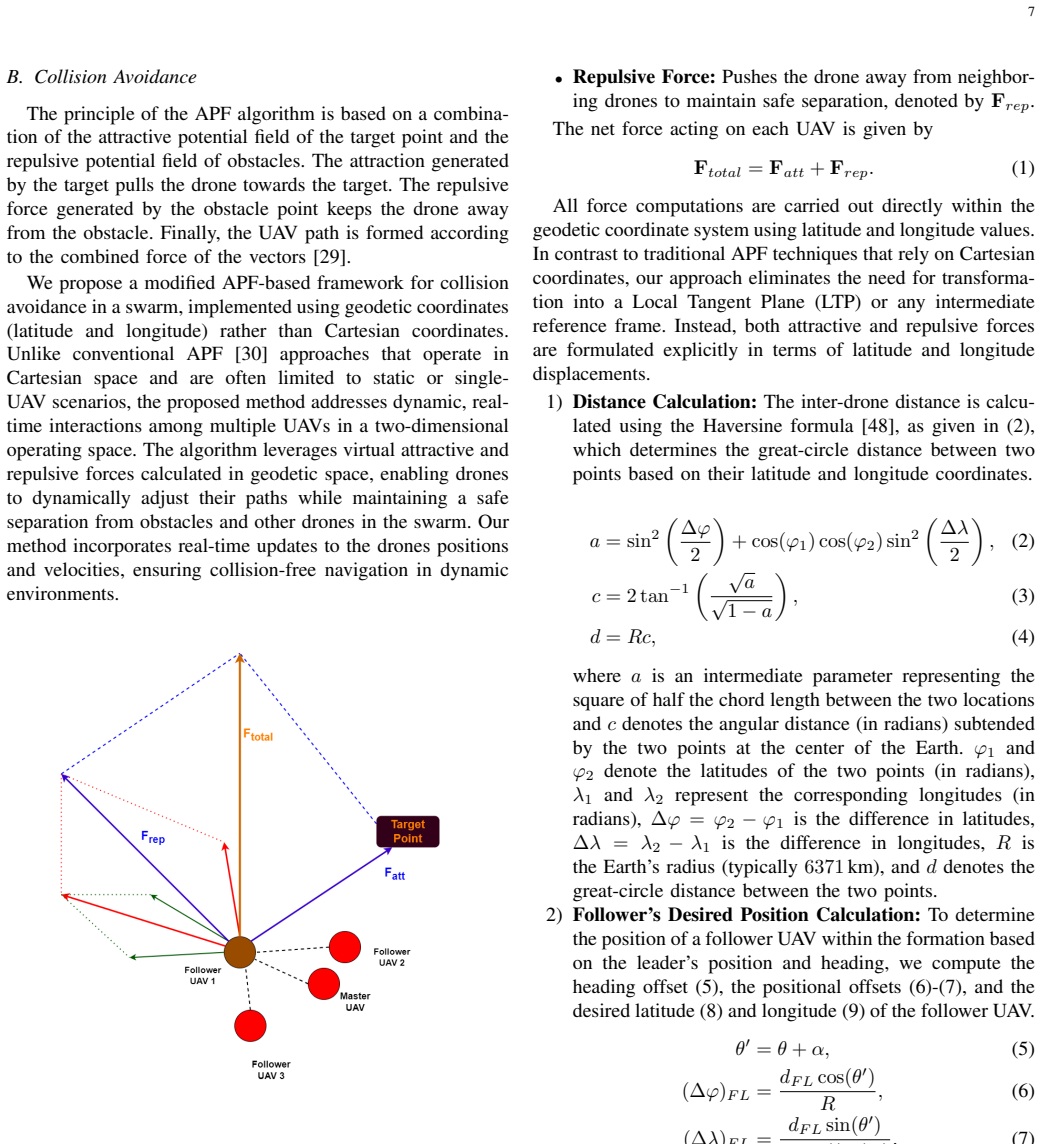
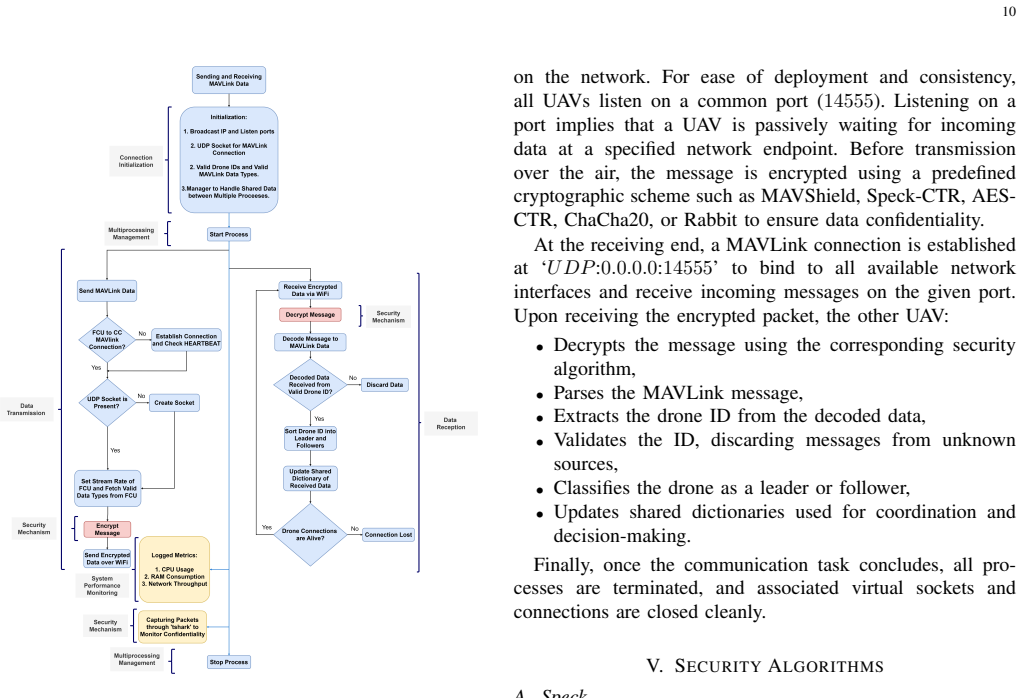
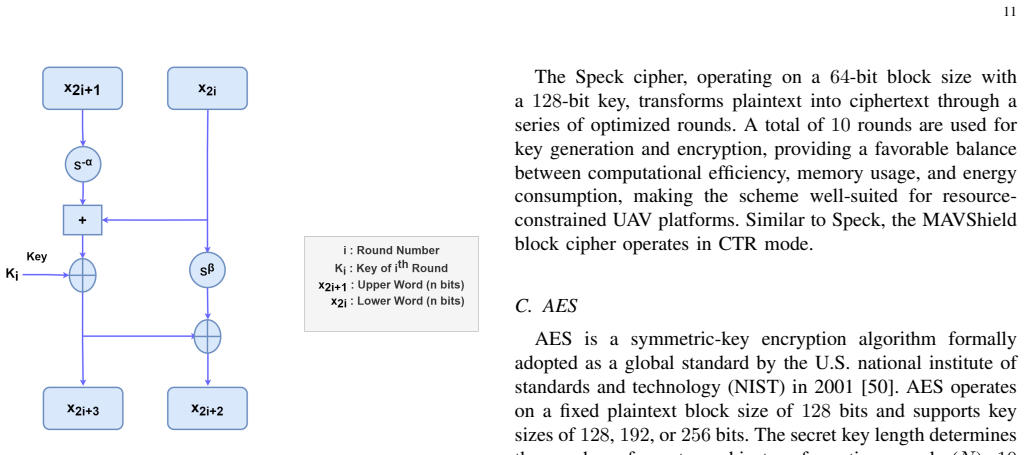
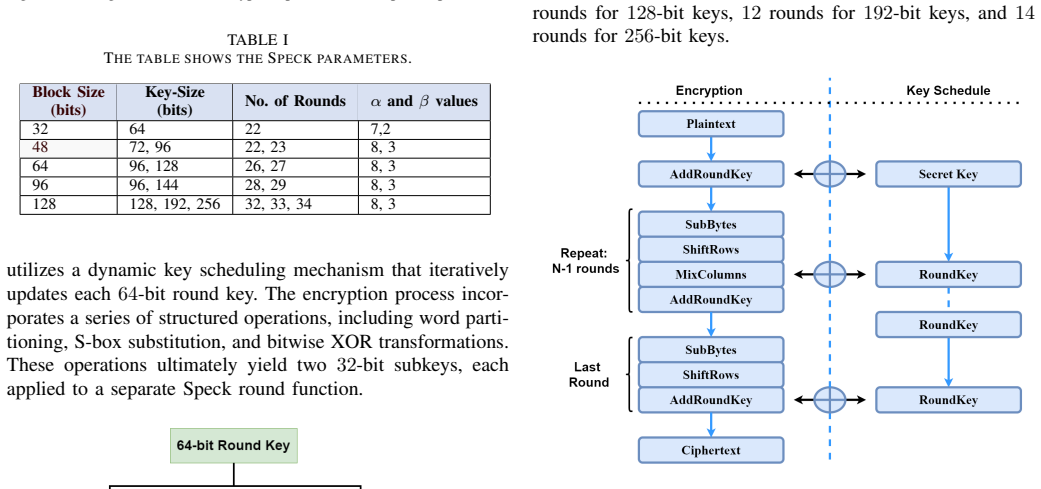
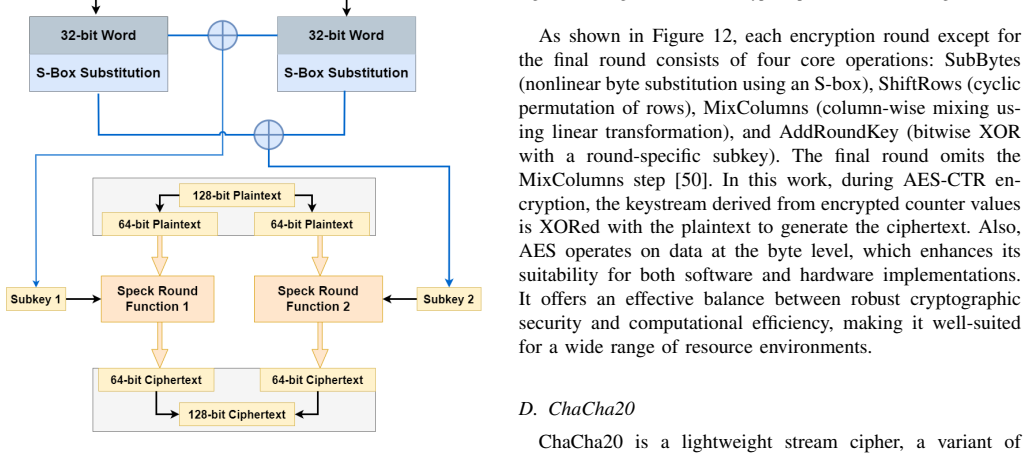
Unmanned aerial vehicle (UAV) swarms rely on distributed coordination and cooperative communication to support scalable operations, extended coverage, and applications such as surveillance and real-time data exchange. Wireless technologies such as radio frequency (RF) and WiFi are widely used for UAV-to-UAV and UAV-to-ground control station (GCS) communication but introduce significant security challenges. MAVLink, the predominant communication protocol in UAV systems, provides message integrity and authentication but lacks built-in encryption, leaving telemetry traffic vulnerable to eavesdropping. In our previous work, we proposed MAVShield, a lightweight encryption framework for MAVLink communications. In this paper, MAVShield, AES-CTR, Speck-CTR, ChaCha20, and Rabbit are integrated into four custom-built UAVs to establish secure communication links over RF and WiFi channels. Their performance is evaluated through flight experiments using a UAV swarm testbed. Encrypted telemetry data enable autonomous formation control and collision avoidance during flight. For collision avoidance, we develop a modified artificial potential field (APF) algorithm that computes attractive and repulsive forces directly in geodetic coordinates, eliminating Cartesian transformations and reducing trajectory oscillations while avoiding local-minimum trapping. CPU utilization, memory consumption, and packet delivery ratio (PDR) are measured for each encryption scheme. Results show that MAVShield achieves performance comparable to unencrypted communication while outperforming AES-CTR, Speck-CTR, ChaCha20, and Rabbit in overall efficiency. Algebraic cryptanalysis and Wireshark-based traffic analysis demonstrate resistance to key-recovery attacks and protection of telemetry confidentiality. The results indicate that MAVShield is an efficient and secure solution for UAV swarm communication.
Editorial analysis
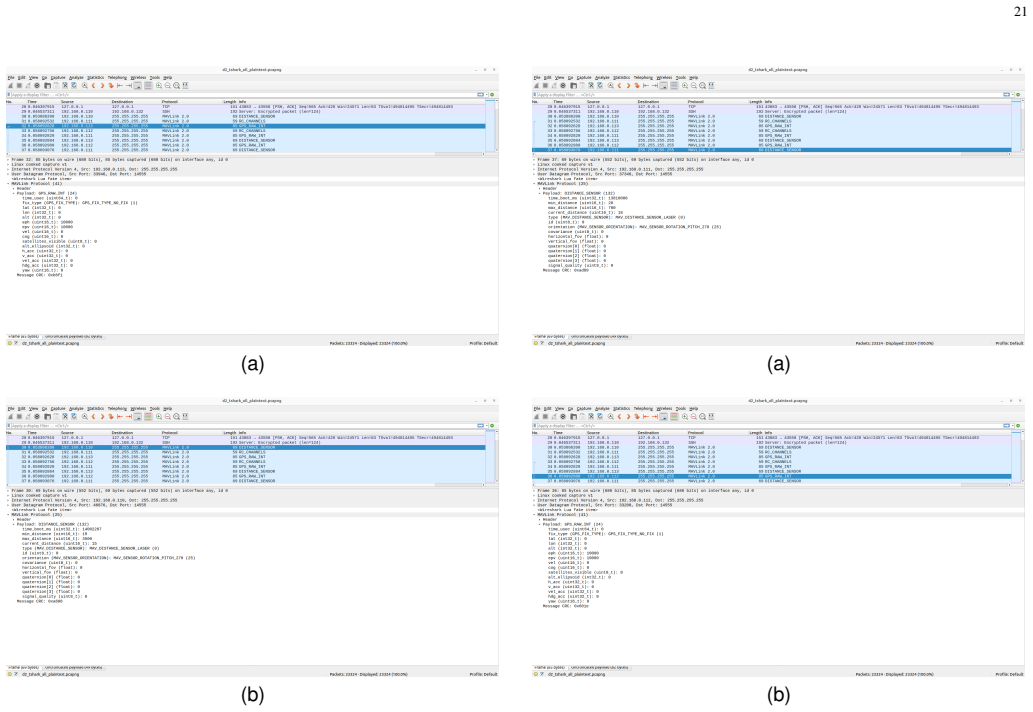
A structured set of objections, weighed in public.
Referee Report
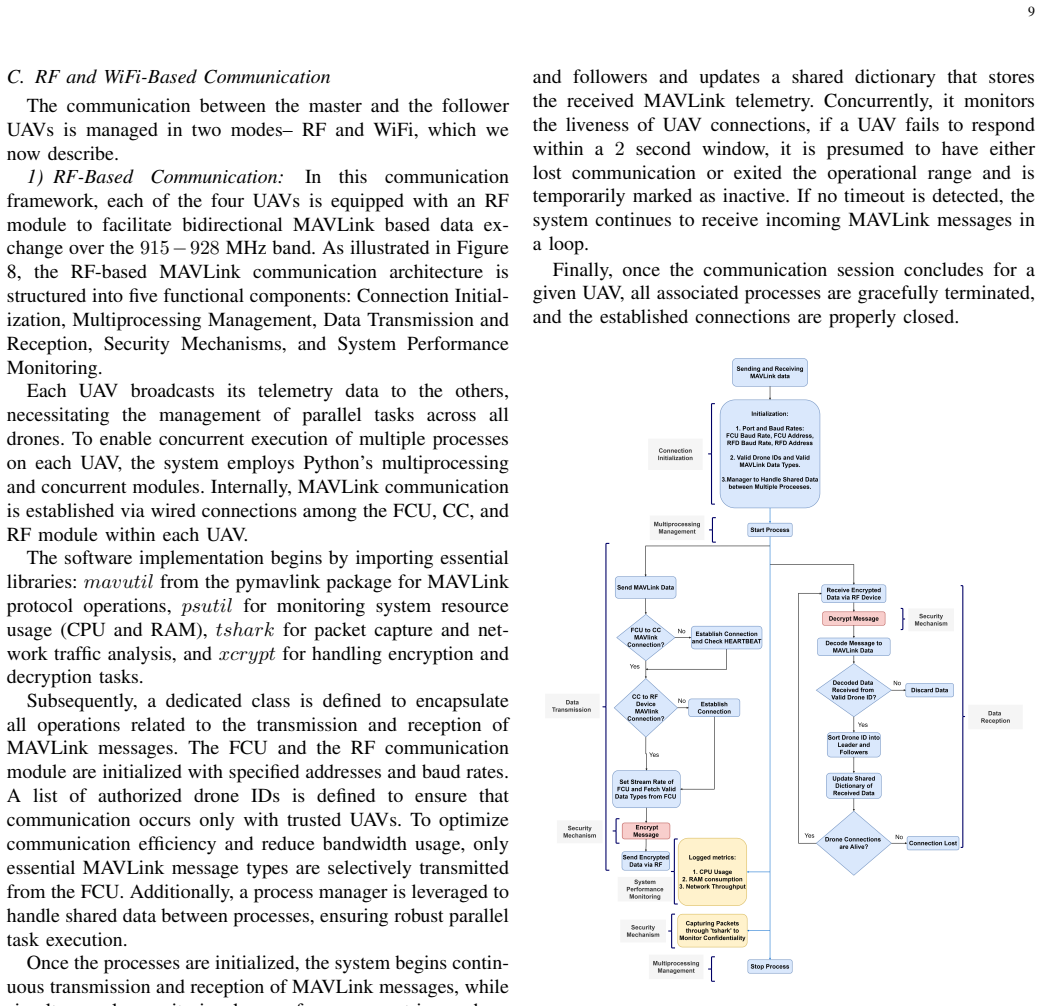
Summary. The manuscript integrates MAVShield (a lightweight encryption framework for MAVLink) along with AES-CTR, Speck-CTR, ChaCha20, and Rabbit into a four-UAV testbed using RF and WiFi channels. It evaluates CPU utilization, memory consumption, and packet delivery ratio (PDR) during flight experiments that include autonomous formation control and collision avoidance via a modified artificial potential field (APF) algorithm operating directly in geodetic coordinates. The paper claims MAVShield achieves performance comparable to unencrypted communication while outperforming the other schemes in overall efficiency, and demonstrates resistance to key-recovery attacks via algebraic cryptanalysis and Wireshark traffic analysis.
Significance. If the reported measurements hold, the work supplies concrete hardware-level efficiency numbers for lightweight encryption options in small UAV systems and pairs them with a practical collision-avoidance modification. The direct testbed implementation and attack-resistance checks are positive features. The four-UAV scale, however, restricts the broader significance for operational drone swarms.
major comments (2)
- [Abstract / Evaluation] Abstract and evaluation section: the headline claim that MAVShield 'achieves performance comparable to unencrypted communication while outperforming' the listed ciphers is derived exclusively from measurements on four UAVs in a limited set of formation-flight scenarios. No data or analysis address node counts beyond four, traffic density, or coordination overhead at larger scales, so the generalization to 'UAV swarm communication' is unsupported by the reported experiments.
- [Results] Results section: the CPU, memory, and PDR comparisons lack any indication of error bars, number of repeated trials, statistical tests, or exclusion criteria. Without these, the reliability of the efficiency ranking cannot be assessed and the central performance claim rests on unquantified single-run or averaged values.
minor comments (2)
- [Abstract] The abstract states that encrypted telemetry enables autonomous formation control but does not specify the exact flight trajectories, durations, or environmental conditions used in the testbed.
- [Security analysis] Details of the algebraic cryptanalysis (specific attacks attempted, key sizes, or success metrics) are referenced but not elaborated in the provided description.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on our manuscript. We address each major comment below and indicate the revisions we will make to strengthen the paper.
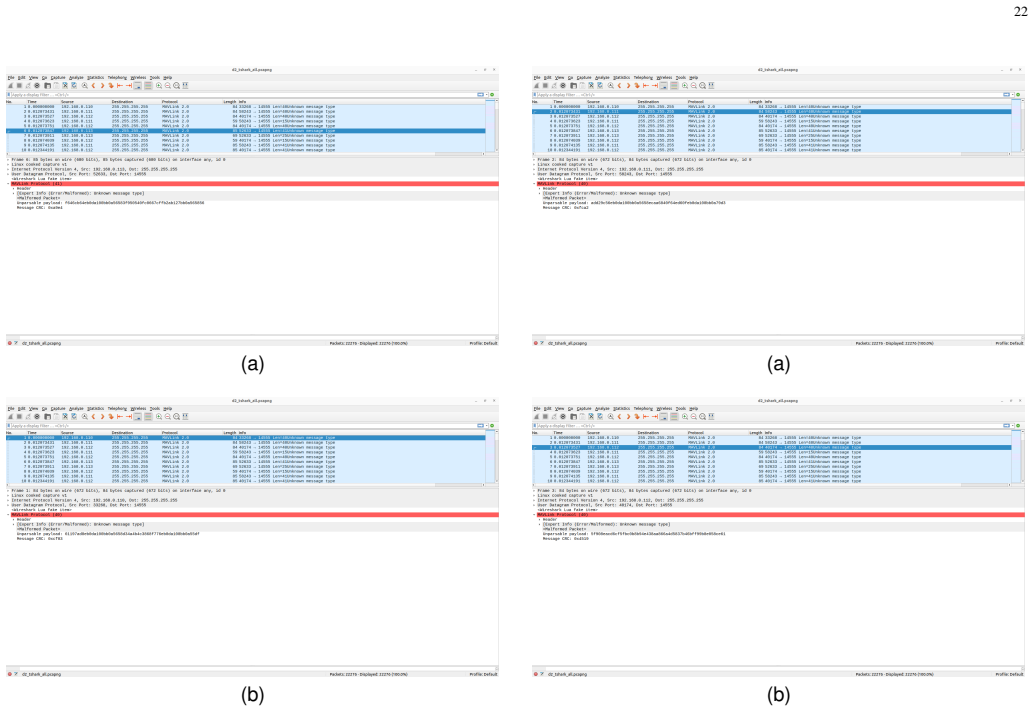
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and evaluation section: the headline claim that MAVShield 'achieves performance comparable to unencrypted communication while outperforming' the listed ciphers is derived exclusively from measurements on four UAVs in a limited set of formation-flight scenarios. No data or analysis address node counts beyond four, traffic density, or coordination overhead at larger scales, so the generalization to 'UAV swarm communication' is unsupported by the reported experiments.
Authors: We agree that the experimental results are based exclusively on a four-UAV testbed in specific formation-flight scenarios and that the manuscript does not provide data or analysis for larger node counts, higher traffic density, or coordination overhead. The generalization in the abstract and evaluation section to 'UAV swarm communication' is therefore not fully supported by the reported experiments. We will revise the abstract, introduction, and evaluation sections to explicitly limit the claims to the four-UAV scale tested and to remove any implication of broader scalability without additional evidence. revision: yes
-
Referee: [Results] Results section: the CPU, memory, and PDR comparisons lack any indication of error bars, number of repeated trials, statistical tests, or exclusion criteria. Without these, the reliability of the efficiency ranking cannot be assessed and the central performance claim rests on unquantified single-run or averaged values.
Authors: The measurements were collected across multiple flight experiments, but the original manuscript does not report the number of trials, variability, error bars, or statistical procedures. We will revise the results section to include the number of repeated trials conducted, the observed consistency across runs, and any exclusion criteria applied. Full statistical tests were not performed in the original work because the emphasis was on practical testbed implementation rather than statistical hypothesis testing; however, we can add the requested procedural details to allow readers to assess reliability. revision: partial
Circularity Check
No circularity; purely experimental measurements with no derivations reducing to inputs by construction
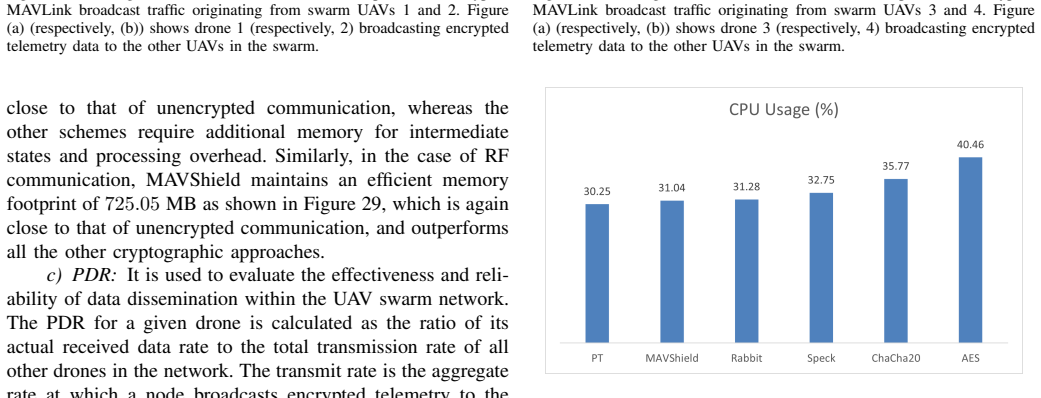
full rationale
The paper reports direct hardware measurements of CPU utilization, memory consumption, and PDR on a four-UAV testbed for MAVShield and comparator ciphers, plus algebraic cryptanalysis and traffic analysis. No equations, fitted parameters, or predictions appear that reduce results to self-referential definitions or prior fits. The self-citation to the authors' earlier MAVShield proposal supplies only the framework definition; the performance claims rest on new testbed data. The modified APF algorithm is presented as a direct design choice without any circular reduction to its own outputs. The work is self-contained against external benchmarks and receives the default non-circularity finding.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Standard cryptographic assumptions that AES-CTR, ChaCha20, Speck-CTR and Rabbit provide confidentiality when used with MAVLink.
- domain assumption The four-UAV flight scenarios capture the relevant performance and security behaviors of operational swarms.
Reference graph
Works this paper leans on
-
[1]
Unmanned aerial vehicles (UA Vs): A survey on civil applications and key research challenges,
H. Shakhatreh, A. H. Sawalmeh, A. Al-Fuqaha, Z. Dou, E. Almaita, I. Khalil, N. S. Othman, A. Khreishah, and M. Guizani, “Unmanned aerial vehicles (UA Vs): A survey on civil applications and key research challenges,”IEEE Access, vol. 7, pp. 48 572–48 634, 2019
2019
-
[2]
Deep learning for secure UA V swarm communication under malicious attacks,
Q. Wu, Y . Zhang, Z. Yang, and M. R. Shikh-Bahaei, “Deep learning for secure UA V swarm communication under malicious attacks,”IEEE Transactions on Wireless Communications, vol. 23, no. 10, pp. 14 879– 14 894, 2024
2024
-
[3]
A survey on aerial swarm robotics,
S.-J. Chung, A. A. Paranjape, P. Dames, S. Shen, and V . Kumar, “A survey on aerial swarm robotics,”IEEE Transactions on Robotics, vol. 34, no. 4, pp. 837–855, 2018
2018
-
[4]
A tutorial on UA Vs for wireless networks: Applications, challenges, and open problems,
M. Mozaffari, W. Saad, M. Bennis, Y .-H. Nam, and M. Debbah, “A tutorial on UA Vs for wireless networks: Applications, challenges, and open problems,”IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2334–2360, 2019
2019
-
[5]
Drone networks: Communications, coordination, and sensing,
E. Yanmaz, S. Yahyanejad, B. Rinner, H. Hellwagner, and C. Bettstetter, “Drone networks: Communications, coordination, and sensing,”Ad Hoc Networks, vol. 68, pp. 1–15, 2018
2018
-
[6]
Micro air vehicle link (MA VLink) in a nutshell: A survey,
A. Koub ˆaa, A. Allouch, M. Alajlan, Y . Javed, A. Belghith, and M. Khal- gui, “Micro air vehicle link (MA VLink) in a nutshell: A survey,”IEEE Access, vol. 7, pp. 87 658–87 680, 2019
2019
-
[7]
Exploiting the vulnerabilities in MA VLink protocol for UA V hijacking,
F. Du, J. Ge, W. Wang, Y . Zou, S.-Y . Chang, and W. Fan, “Exploiting the vulnerabilities in MA VLink protocol for UA V hijacking,” in2024 17th International Conference on Security of Information and Networks (SIN). IEEE, 2024, pp. 1–8
2024
-
[8]
Advancement challenges in UA V swarm formation control: A comprehensive review,
Y . Bu, Y . Yan, and Y . Yang, “Advancement challenges in UA V swarm formation control: A comprehensive review,”Drones, vol. 8, no. 7, p. 320, 2024
2024
-
[9]
Leader-follower UA V forma- tion control with cost-effective coordination and pre-flight simulation,
P.-T. Lin, R.-B. Wu, and S.-C. Chang, “Leader-follower UA V forma- tion control with cost-effective coordination and pre-flight simulation,” Drones, vol. 10, no. 4, p. 286, 2026
2026
-
[10]
Secure multihop telemetry broadcasts for UA V swarm communication,
R. Rotta and P. Mykytyn, “Secure multihop telemetry broadcasts for UA V swarm communication,”arXiv preprint arXiv:2401.11915, 2024
arXiv 2024
-
[11]
Cyber physical systems security: Limitations, issues and future trends,
J.-P. A. Yaacoub, O. Salman, H. N. Noura, N. Kaaniche, A. Chehab, and M. Malli, “Cyber physical systems security: Limitations, issues and future trends,”Microprocessors and Microsystems, vol. 77, p. 103201, 2020
2020
-
[12]
Exploring security vulnerabilities of unmanned aerial vehicles,
N. M. Rodday, R. d. O. Schmidt, and A. Pras, “Exploring security vulnerabilities of unmanned aerial vehicles,” inNOMS 2016-2016 IEEE/IFIP Network Operations and Management Symposium. IEEE, 2016, pp. 993–994
2016
-
[13]
Data security and authentication in hybrid cloud computing model,
J. K. Wang and X. Jia, “Data security and authentication in hybrid cloud computing model,” in2012 IEEE Global High Tech Congress on Electronics. IEEE, 2012, pp. 117–120
2012
-
[14]
Role of cyber cecurity in drone technology,
B. Siddappaji and K. Akhilesh, “Role of cyber cecurity in drone technology,” inSmart Technologies: Scope and Applications. Springer, 2019, pp. 169–178
2019
-
[15]
MA VLink protocol: A survey of security threats and countermeasures,
M. A. Hamza, M. Mohsin, M. Khalil, and S. M. K. A. Kazmi, “MA VLink protocol: A survey of security threats and countermeasures,” in2024 4th International Conference on Digital Futures and Transfor- mative Technologies (ICoDT2). IEEE, 2024, pp. 1–8
2024
-
[16]
Exper- iments on drone to drone communication with WiFi, LTE-A, and 5G,
A. Fakhreddine, C. Raffelsberger, M. Sende, and C. Bettstetter, “Exper- iments on drone to drone communication with WiFi, LTE-A, and 5G,” in2022 IEEE Globecom Workshops (GC Wkshps). IEEE, 2022, pp. 904–909
2022
-
[17]
UA V communications for 5G and beyond: recent advances and future trends,
B. Li, Z. Fei, and Y . Zhang, “UA V communications for 5G and beyond: recent advances and future trends,”IEEE Internet of Things Journal, vol. 6, no. 2, pp. 2241–2263, 2018
2018
-
[18]
A sur- vey on security of UA V swarm networks: attacks and countermeasures,
X. Wang, Z. Zhao, L. Yi, Z. Ning, L. Guo, F. R. Yu, and S. Guo, “A sur- vey on security of UA V swarm networks: attacks and countermeasures,” ACM Computing Surveys, vol. 57, no. 3, pp. 1–37, 2024
2024
-
[19]
Towards secure wireless mesh networks for UA V swarm connectivity: current threats, research, and opportunities,
M. A. Lopez, M. Baddeley, W. T. Lunardi, A. Pandey, and J.-P. Giacalone, “Towards secure wireless mesh networks for UA V swarm connectivity: current threats, research, and opportunities,” in2021 17th International Conference on Distributed Computing in Sensor Systems (DCOSS). IEEE, 2021, pp. 319–326
2021
-
[20]
Using a drone swarm team for safety, security and protection against unauthorized drones,
E. Olsson, P. Funk, and R. Sohlberg, “Using a drone swarm team for safety, security and protection against unauthorized drones,” in International Congress and Workshop on Industrial AI. Springer, 2023, pp. 263–277
2023
-
[21]
Securing transmission for UA V swarm enabled communication network,
R. Dong, B. Wang, K. Cao, and T. Cheng, “Securing transmission for UA V swarm enabled communication network,”IEEE Systems Journal, vol. 16, no. 4, pp. 5200–5211, 2021
2021
-
[22]
Confidential and authenticated communications in a large fixed wing UA V swarm,
R. B. Thompson and P. Thulasiraman, “Confidential and authenticated communications in a large fixed wing UA V swarm,” in2016 IEEE 15th International Symposium on Network Computing and Applications (NCA). IEEE, 2016, pp. 375–382
2016
-
[23]
A novel cipher for enhancing MA VLink security: Design, security Analysis, and performance evaluation using a drone testbed,
B. Dixit, A. Ananthapadmanabhan, A. Thahsin, S. Pathak, G. S. Kas- bekar, and A. Maity, “A novel cipher for enhancing MA VLink security: Design, security Analysis, and performance evaluation using a drone testbed,”IEEE Open Journal of the Communications Society, vol. 6, pp. 9027–9051, 2025
2025
-
[24]
A comparative method for securing Internet of Things (IoT) devices: AES vs SIMON Speck encryptions,
B. Y . Yustiarini, F. Dewanta, and H. H. Nuha, “A comparative method for securing Internet of Things (IoT) devices: AES vs SIMON Speck encryptions,” in2022 1st International Conference on Information System & Information Technology (ICISIT). IEEE, 2022, pp. 392–396
2022
-
[25]
ChaCha, a variant of Salsa20,
D. J. Bernsteinet al., “ChaCha, a variant of Salsa20,” inWorkshop Record of SASC, vol. 8, no. 1. Citeseer, 2008, pp. 3–5
2008
-
[26]
Notes on the design and analysis of SIMON and Speck,
R. Beaulieu, D. Shors, J. Smith, S. Treatman-Clark, B. Weeks, and L. Wingers, “Notes on the design and analysis of SIMON and Speck,” Cryptology ePrint Archive, 2017
2017
-
[27]
The Rabbit stream cipher,
M. Boesgaard, M. Vesterager, and E. Zenner, “The Rabbit stream cipher,” inNew Stream Cipher Designs: The eSTREAM Finalists. Springer, 2008, pp. 69–83
2008
-
[28]
A survey of multi agent formation control,
K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi agent formation control,”Automatica, vol. 53, pp. 424–440, 2015
2015
-
[29]
An improved UA V path planning method based on APSOvnp APF algorithm,
H. Zhang and F. Luo, “An improved UA V path planning method based on APSOvnp APF algorithm,” in2022 34th Chinese Control and Decision Conference (CCDC). IEEE, 2022, pp. 5458–5463
2022
-
[30]
Artificial potential field algorithm for obstacle avoidance in UA V quadrotor for dynamic environment,
A. Ma’Arif, W. Rahmaniar, M. A. M. Vera, A. A. Nuryono, R. Majdoubi, and A. C ¸ akan, “Artificial potential field algorithm for obstacle avoidance in UA V quadrotor for dynamic environment,” in2021 IEEE International Conference on Communication, Networks and Satellite (COMNETSAT). IEEE, 2021, pp. 184–189
2021
-
[31]
UA V obstacle avoidance using potential field under dynamic environment,
A. Budiyanto, A. Cahyadi, T. B. Adji, and O. Wahyunggoro, “UA V obstacle avoidance using potential field under dynamic environment,” in2015 International Conference on Control, Electronics, Renewable Energy and Communications (ICCEREC), 2015, pp. 187–192
2015
-
[32]
Collision avoidance for cooperative UA Vs with optimized artificial potential field algorithm,
J. Sun, J. Tang, and S. Lao, “Collision avoidance for cooperative UA Vs with optimized artificial potential field algorithm,”IEEE Access, vol. 5, pp. 18 382–18 390, 2017
2017
-
[33]
An improved artificial potential field method for path planning and formation control of the 25 multi-UA V systems,
Z. Pan, C. Zhang, Y . Xia, H. Xiong, and X. Shao, “An improved artificial potential field method for path planning and formation control of the 25 multi-UA V systems,”IEEE Transactions on Circuits and Systems II: Express Briefs, vol. 69, no. 3, pp. 1129–1133, 2022
2022
-
[34]
Carlet,Boolean functions for cryptography and coding theory
C. Carlet,Boolean functions for cryptography and coding theory. Cambridge University Press, 2021
2021
-
[35]
Al- gebraic cryptanalysis of round reduced lightweight ciphers Simon and Speck,
A. Kutsenko, N. Atutova, D. Zyubina, E. Maro, and S. Filippov, “Al- gebraic cryptanalysis of round reduced lightweight ciphers Simon and Speck,” in10 th Workshop on Current Trends in Cryptology (CTCrypt 2021), 2021, p. 162
2021
-
[36]
Algebraic attacks on stream ciphers with linear feedback,
N. T. Courtois and W. Meier, “Algebraic attacks on stream ciphers with linear feedback,” inInternational Conference on the Theory and Applications of Cryptographic Techniques. Springer, 2003, pp. 345– 359
2003
-
[37]
ElimLin algo- rithm revisited,
N. T. Courtois, P. Sepehrdad, P. Su ˇsil, and S. Vaudenay, “ElimLin algo- rithm revisited,” inInternational Workshop on Fast Software Encryption. Springer, 2012, pp. 306–325
2012
-
[38]
System of linear equations, Gaussian elimination,
S. Gharib, S. R. Ali, R. Khan, N. Munir, and M. Khanam, “System of linear equations, Gaussian elimination,”Global Journal of Computer Science and Technology, vol. 15, no. 5, 2015
2015
-
[39]
On the Glucose SAT solver,
G. Audemard and L. Simon, “On the Glucose SAT solver,”International Journal on Artificial Intelligence Tools, vol. 27, no. 01, p. 1840001, 2018
2018
-
[40]
On the complexity of derivation in propositional calcu- lus,
G. S. Tseitin, “On the complexity of derivation in propositional calcu- lus,” inAutomation of Reasoning 2: Classical Papers on Computational Logic 1967–1970. Springer, 1983, pp. 466–483
1967
-
[41]
Sanders,Practical packet analysis: Using Wireshark to solve real world network problems
C. Sanders,Practical packet analysis: Using Wireshark to solve real world network problems. No Starch Press, 2017
2017
-
[42]
A survey on cybersecurity attacks and defenses for unmanned aerial systems,
Z. Wang, Y . Li, S. Wu, Y . Zhou, L. Yang, Y . Xu, T. Zhang, and Q. Pan, “A survey on cybersecurity attacks and defenses for unmanned aerial systems,”Journal of Systems Architecture, vol. 138, p. 102870, 2023
2023
-
[43]
State-of-the-art and future research challenges in UA V swarms,
S. Javed, A. Hassan, R. Ahmad, W. Ahmed, R. Ahmed, A. Saadat, and M. Guizani, “State-of-the-art and future research challenges in UA V swarms,”IEEE Internet of Things Journal, vol. 11, no. 11, pp. 19 023– 19 045, 2024
2024
-
[44]
A survey on IoT security: Application areas, security threats, and solution architectures,
V . Hassija, V . Chamola, V . Saxena, D. Jain, P. Goyal, and B. Sikdar, “A survey on IoT security: Application areas, security threats, and solution architectures,”IEEE Access, vol. 7, pp. 82 721–82 743, 2019
2019
-
[45]
Collision avoid- ance in UA V swarms: A learning centric perspective on collaborative intelligence,
H. S. Khargharia, A. Ouali, S. Shakya, and S. Ahmad, “Collision avoid- ance in UA V swarms: A learning centric perspective on collaborative intelligence,”Neurocomputing, p. 132020, 2025
2025
-
[46]
A survey of UA V based data collection: challenges, solutions and future perspectives,
K. Messaoudi, O. S. Oubbati, A. Rachedi, A. Lakas, T. Bendouma, and N. Chaib, “A survey of UA V based data collection: challenges, solutions and future perspectives,”Journal of Network and Computer Applications, vol. 216, p. 103670, 2023
2023
-
[47]
Networked UA Vs as aerial sensor network for disaster management applications,
M. Quaritsch, K. Kruggl, D. Wischounig-Strucl, S. Bhattacharya, M. Shah, and B. Rinner, “Networked UA Vs as aerial sensor network for disaster management applications,”e & i Elektrotechnik und Infor- mationstechnik, vol. 127, no. 3, pp. 56–63, 2010
2010
-
[48]
Haversine formula and RPA algorithm for navigation system,
S. N. Chan and T. T. Lai, “Haversine formula and RPA algorithm for navigation system,”Int J Data Sci Anal, vol. 6, no. 1, pp. 32–40, 2020
2020
-
[49]
SIMON and Speck: block ciphers for the internet of things,
R. Beaulieu, D. Shors, J. Smith, S. Treatman-Clark, B. Weeks, and L. Wingers, “SIMON and Speck: block ciphers for the internet of things,”Cryptology ePrint Archive, 2015
2015
-
[50]
Advanced encryption standard (AES) algorithm to encrypt and decrypt data,
A. M. Abdullahet al., “Advanced encryption standard (AES) algorithm to encrypt and decrypt data,”Cryptography and Network Security, vol. 16, no. 1, p. 11, 2017
2017
-
[51]
The Salsa20 family of stream ciphers,
D. J. Bernstein, “The Salsa20 family of stream ciphers,” inNew stream cipher designs: the eSTREAM finalists. Springer, 2008, pp. 84–97
2008
-
[52]
Extended Chacha20 stream cipher with enhanced quarter round function,
V . R. Kebande, “Extended Chacha20 stream cipher with enhanced quarter round function,”IEEE Access, vol. 11, pp. 114 220–114 237, 2023
2023
-
[53]
Lecture notes on cryptographic boolean functions,
A. Canteaut, “Lecture notes on cryptographic boolean functions,”Inria, Paris, France, vol. 3, 2016
2016
-
[54]
[Online]
Cube orange plus flight controller. [Online]. Available: https: //docs.px4.io/main/en/flight controller/cubepilot cube orangeplus.html
-
[55]
[Online]
Here 4 high precision dual band RTK navigation module. [Online]. Available: https://docs.cubepilot.org/user-guides/here-4/here-4-manual
-
[56]
[Online]
NVIDIA Jetson Orin Nano. [Online]. Available: https://www.nvidia. com/en-us/autonomous-machines/embedded-systems/jetson-orin/
-
[57]
[Online]
RFD900x radio modem. [Online]. Available: https://files.rfdesign.com. au/Files/documents/RFD900x%20DataSheet%20V1.2.pdf
-
[58]
[Online]
AC8265 wireless NIC For Jetson Nano, WiFi and Bluetooth. [Online]. Available: https://www.crazypi. com/INTEL-AC8265-JETSON-WIFI-BLUETOOTH-NIC? srsltid=AfmBOor2tpYv9qgsbmw6R1ceyZkzm8oED6eAmJjG u4MsdAHc5p23Mbe
-
[59]
[Online]
10000mAH 6S 25C 22.2V LiPo battery. [Online]. Available: https://robokits.co.in/batteries-chargers/drone-batteries
-
[60]
[Online]
MN4006 antigravity type 4-6S UA V motor. [Online]. Available: https://store.tmotor.com/categorys/multi-rotor-drone-motor
-
[61]
[Online]
Jetson Orin Nano developer kit getting started guide. [Online]. Available: https://developer.nvidia.com/embedded/learn/ get-started-jetson-orin-nano-devkit#firmware
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.