Funnel cruise control
Pith reviewed 2026-05-25 00:31 UTC · model grok-4.3
The pith
A model-free funnel cruise controller maintains safety distance while approaching a target velocity by switching between speed and distance regulation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The funnel cruise controller achieves guaranteed safety distance and maximal approach to favorite velocity. It consists of a velocity funnel controller that acts when the leader is far and a distance funnel controller that acts when the leader is close, together with a logic that switches between them. The feasibility of this combined controller is established by rigorous proof.
What carries the argument
The funnel cruise controller, which switches between a velocity funnel controller and a distance funnel controller according to the leader distance.
If this is right
- The safety distance is guaranteed at all times regardless of the leader's behavior.
- The favorite velocity is reached whenever the leader vehicle is sufficiently far ahead.
- The controller requires no model of the vehicle dynamics or the leader.
- The same design works across multiple common traffic scenarios.
Where Pith is reading between the lines
- The approach may extend to platoons of several vehicles by applying the same switching idea between consecutive pairs.
- Sensor noise or actuator limits could be incorporated by adjusting the funnel boundaries without changing the core structure.
- The model-free property suggests the method could be combined with learning-based velocity selection.
Load-bearing premise
The switching logic between the two funnel controllers must be arranged so that the safety distance is never violated during any transition.
What would settle it
A concrete simulation or vehicle test in which the distance to the leader drops below the safety threshold at any time while the controller is running.
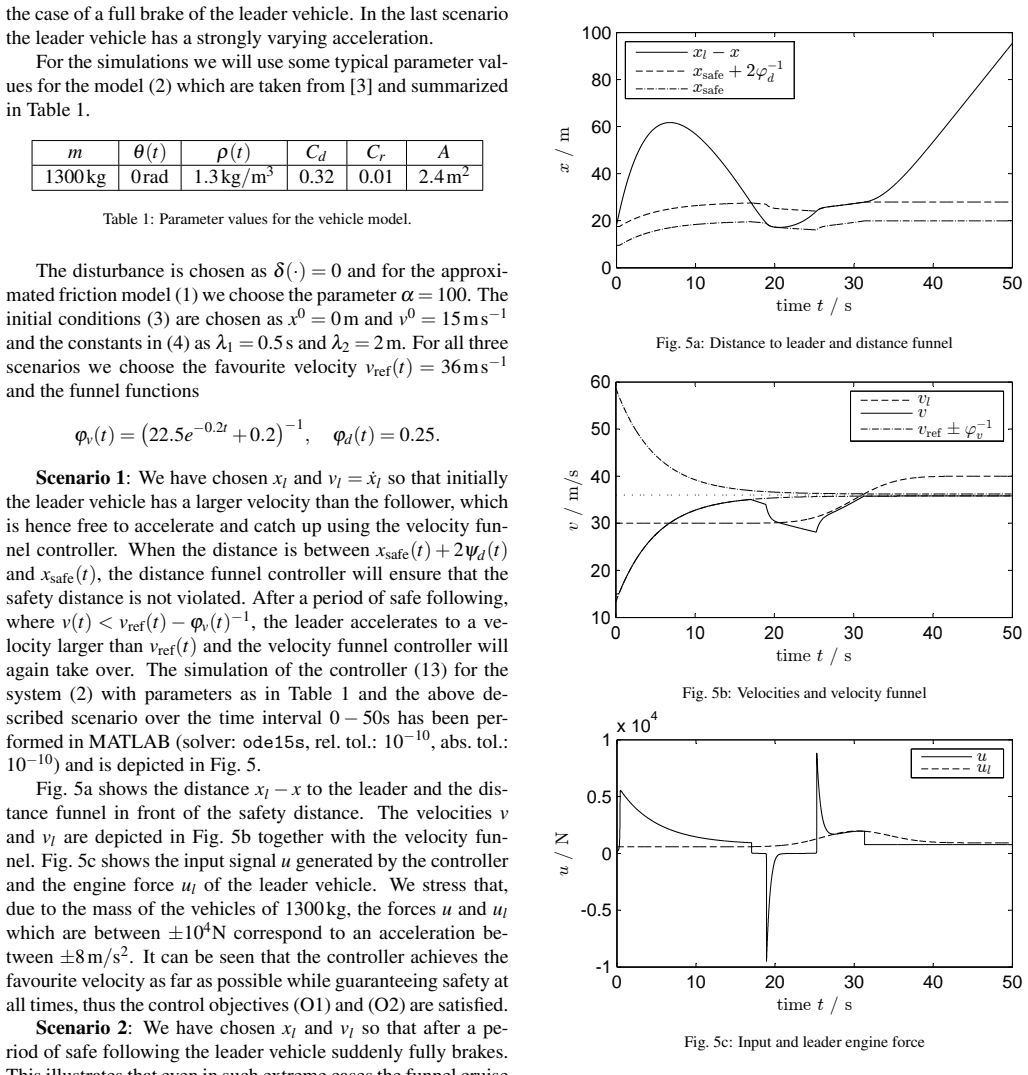
Figures





read the original abstract
We consider the problem of vehicle following, where a safety distance to the leader vehicle is guaranteed at all times and a favourite velocity is reached as far as possible. We introduce the funnel cruise controller as a novel universal adaptive cruise control mechanism which is model-free and achieves the aforementioned control objectives. The controller consists of a velocity funnel controller, which directly regulates the velocity when the leader vehicle is far away, and a distance funnel controller, which regulates the distance to the leader vehicle when it is close so that the safety distance is never violated. We provide a rigorous proof for the feasibility of the overall controller design. The funnel cruise controller is illustrated by a simulation of three different scenarios which may occur in daily traffic.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the funnel cruise controller, a model-free adaptive cruise control mechanism for vehicle following. It combines a velocity funnel controller (active when the leader is far) with a distance funnel controller (active when close) to guarantee a safety distance at all times while approaching a favorite velocity when possible. The design is supported by a rigorous feasibility proof for the overall switched system and illustrated via simulations of three daily traffic scenarios.
Significance. If the feasibility proof holds, the result offers a novel model-free approach to adaptive cruise control with explicit safety invariants, which could be significant for control theory applications in autonomous vehicles. The combination of funnel-based regulation for both velocity and distance, with a switching mechanism, provides a universal controller without requiring vehicle models.
major comments (1)
- [overall controller design and switching logic] The feasibility proof for the composite controller (the section describing the overall controller design and switching logic): the argument that the switching condition preserves the safety distance for arbitrary leader trajectories must explicitly show that the distance error remains inside the funnel boundary at the instant of activation, accounting for worst-case closing speeds before the switch. The provided description of the 'close' threshold does not bound this, which is load-bearing for the central safety claim.
minor comments (2)
- [simulations] The simulation section would benefit from explicit parameter values for the funnels and switching threshold to allow reproducibility.
- [controller definitions] Notation for the funnel boundaries and error signals should be defined consistently across the velocity and distance controllers.
Simulated Author's Rebuttal
We thank the referee for the careful reading and the constructive comment regarding the switching logic in the feasibility proof. We address the point below.
read point-by-point responses
-
Referee: The feasibility proof for the composite controller (the section describing the overall controller design and switching logic): the argument that the switching condition preserves the safety distance for arbitrary leader trajectories must explicitly show that the distance error remains inside the funnel boundary at the instant of activation, accounting for worst-case closing speeds before the switch. The provided description of the 'close' threshold does not bound this, which is load-bearing for the central safety claim.
Authors: We agree that an explicit verification of the funnel invariant at the switching instant is essential for arbitrary leader trajectories. The existing feasibility argument establishes that the velocity funnel maintains sufficient separation prior to the switch and that the distance funnel is only activated when the error lies inside its boundary by construction of the threshold; however, to strengthen clarity we will revise the overall controller design section to include a dedicated lemma that explicitly bounds the distance error at activation, incorporating a worst-case relative-velocity estimate derived from the velocity funnel performance. This addition will make the preservation of the safety distance fully rigorous without altering the controller or the core proof strategy. revision: yes
Circularity Check
No circularity; feasibility proof stands independently of inputs
full rationale
The paper presents a novel model-free funnel cruise controller composed of velocity and distance funnel components plus switching logic, with an explicit claim of a rigorous feasibility proof. No equations or claims reduce a prediction to a fitted parameter by construction, no self-citation is invoked as the sole justification for a uniqueness or invariance result, and the switching safety argument is asserted to rest on an independent proof rather than on redefinition of the funnels themselves. This matches the default case of a self-contained derivation.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The controller consists of a velocity funnel controller... and a distance funnel controller... min{−kv(t)ev(t),−kd(t)ed(t)}
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 2.1... (O1) xl(t)−x(t)≥xsafe(t)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Ames, A., Grizzle, J., Tabuada, P., 2014. Control barrier function based quadratic programs with application to adaptive cruise control, in: Proc. 53rd IEEE Conf. Decis. Control, Los Angeles, USA, pp. 6271–6278
work page 2014
-
[2]
Armstrong-Hélouvry, B., Dupont, P.E., Canudas-de Wit, C., 1994. A sur- vey of models, analysis tools and compensation methods for the control of machines with friction. Automatica 30, 1083–1138
work page 1994
-
[3]
Feedback Systems: An Introduction for Scientists and Engineers
Åström, K.J., Murray, R.M., 2008. Feedback Systems: An Introduction for Scientists and Engineers. Princeton University Press, Princeton, NJ
work page 2008
-
[4]
Model predic- tive control of transitional maneuvers for adaptive cruise control vehicles
Bageshwar, V .L., Garrard, W.L., Rajamani, R., 2004. Model predic- tive control of transitional maneuvers for adaptive cruise control vehicles. IEEE Trans. Vehicular Technology 53, 1573–1885
work page 2004
-
[5]
Funnel control for nonlinear systems with known strict relative degree
Berger, T., Lê, H.H., Reis, T., 2018. Funnel control for nonlinear systems with known strict relative degree. Automatica 87, 345–357
work page 2018
-
[6]
Combined open-loop and funnel control for underactuated multibody systems
Berger, T., Otto, S., Reis, T., Seifried, R., 2019a. Combined open-loop and funnel control for underactuated multibody systems. Nonlinear Dy- namics 95, 1977–1998
work page 1977
-
[7]
Funnel control for a moving water tank
Berger, T., Puche, M., Schwenninger, F.L., 2019b. Funnel control for a moving water tank. Submitted for publication, preprint available from the website of the authors
-
[8]
Funnel control in the presence of infinite-dimensional internal dynamics
Berger, T., Puche, M., Schwenninger, F.L., 2019c. Funnel control in the presence of infinite-dimensional internal dynamics. Submitted for publi- cation, preprint available from the website of the authors
-
[9]
Berger, T., Rauert, A.L., 2018. A universal model-free and safe adap- tive cruise control mechanism, in: Proceedings of the MTNS 2018, Hong Kong. pp. 925–932
work page 2018
-
[10]
Zero dynamics and funnel control for linear electrical circuits
Berger, T., Reis, T., 2014. Zero dynamics and funnel control for linear electrical circuits. J. Franklin Inst. 351, 5099–5132
work page 2014
-
[11]
Hackl, C.M., 2013. PI-funnel control with anti-windup and its application to speed control of electrical drives, in: Proc. 52nd IEEE Conf. Decis. Control, Florence, Italy, pp. 6250–6255
work page 2013
-
[12]
Funnel control for wind turbine systems, in: Proc
Hackl, C.M., 2014. Funnel control for wind turbine systems, in: Proc. 2014 IEEE Int. Conf. Contr. Appl., Antibes, France, pp. 1377–1382
work page 2014
-
[13]
Current PI-funnel control with anti-windup for syn- chronous machines, in: Proc
Hackl, C.M., 2015a. Current PI-funnel control with anti-windup for syn- chronous machines, in: Proc. 54th IEEE Conf. Decis. Control, Osaka, Japan, pp. 1997–2004
work page 1997
-
[14]
Speed funnel control with disturbance observer for wind turbine systems with elastic shaft, in: Proc
Hackl, C.M., 2015b. Speed funnel control with disturbance observer for wind turbine systems with elastic shaft, in: Proc. 54th IEEE Conf. Decis. Control, Osaka, Japan, pp. 12005–2012
work page 2012
-
[15]
Non-identifier Based Adaptive Control in Mechatronics–Theory and Application
Hackl, C.M., 2017. Non-identifier Based Adaptive Control in Mechatronics–Theory and Application. volume 466 of Lecture Notes in Control and Information Sciences. Springer-Verlag, Cham, Switzerland
work page 2017
-
[16]
Advanced smart cruise control with safety distance considered road friction coefficient
Hong, D., Park, C., Yoo, Y ., Hwang, S., 2016. Advanced smart cruise control with safety distance considered road friction coefficient. Int. J. Comp. Theory Engin. 8, 198–202
work page 2016
-
[17]
Decentralized tracking of interconnected systems, in: Hüper, K., Trumpf, J
Ilchmann, A., 2013. Decentralized tracking of interconnected systems, in: Hüper, K., Trumpf, J. (Eds.), Mathematical System Theory - Festschrift in Honor of Uwe Helmke on the Occasion of his Sixtieth Birthday. Cre- ateSpace, pp. 229–245
work page 2013
-
[18]
High-gain control without identification: a survey
Ilchmann, A., Ryan, E.P., 2008. High-gain control without identification: a survey. GAMM Mitt. 31, 115–125
work page 2008
-
[19]
Performance funnels and tracking con- trol
Ilchmann, A., Ryan, E.P., 2009. Performance funnels and tracking con- trol. Int. J. Control 82, 1828–1840
work page 2009
-
[20]
Tracking with prescribed transient behaviour
Ilchmann, A., Ryan, E.P., Sangwin, C.J., 2002. Tracking with prescribed transient behaviour. ESAIM: Control, Optimisation and Calculus of Vari- ations 7, 471–493
work page 2002
-
[21]
Tracking with prescribed transient behavior for nonlinear systems of known relative degree
Ilchmann, A., Ryan, E.P., Townsend, P., 2007. Tracking with prescribed transient behavior for nonlinear systems of known relative degree. SIAM J. Control Optim. 46, 210–230
work page 2007
-
[22]
The Byrnes-Isidori form for infinite-dimensional systems
Ilchmann, A., Selig, T., Trunk, C., 2016. The Byrnes-Isidori form for infinite-dimensional systems. SIAM J. Control Optim. 54, 1504–1534
work page 2016
-
[23]
Input constrained funnel control with applications to chemical reactor models
Ilchmann, A., Trenn, S., 2004. Input constrained funnel control with applications to chemical reactor models. Syst. Control Lett. 53, 361–375
work page 2004
-
[24]
Intelligent cruise control: Theory and experiment, in: Proc
Ioannou, P., Xu, Z., Eckert, S., Clemons, D., Sieja, T., 1993. Intelligent cruise control: Theory and experiment, in: Proc. 32nd IEEE Conf. Decis. Control, pp. 1885–1890
work page 1993
-
[25]
Autonomous intelligent cruise control
Ioannou, P.A., Chien, C.C., 1993. Autonomous intelligent cruise control. IEEE Trans. Vehicular Technology 42, 657–672
work page 1993
-
[26]
Dynamics and bifurcations of non- smooth mechanical systems
Leine, R.I., Nijmeijer, H., 2004. Dynamics and bifurcations of non- smooth mechanical systems. volume 18 of Lecture notes in applied and computational mechanics. Springer-Verlag, Berlin-Heidelberg
work page 2004
-
[27]
Model predictive multi- objective vehicular adaptive cruise control
Li, S., Li, K., Rajamani, R., Wang, J., 2011. Model predictive multi- objective vehicular adaptive cruise control. IEEE Trans. Control Systems Technology 19, 556–566
work page 2011
-
[28]
Adaptive cruise control with safety guar- antees for autonomous vehicles
Magdici, S., Althoff, M., 2017. Adaptive cruise control with safety guar- antees for autonomous vehicles. IFAC PapersOnLine 50, 5774–5781
work page 2017
-
[29]
Mehra, A., Ma, W.L., Berg, F., Tabuada, P., Grizzle, J., Ames, A., 2015. Adaptive cruise control: Experimental validation of advanced controllers on scale-model cars, in: Proc. American Control Conf. 2015, pp. 1411– 1418
work page 2015
-
[30]
Correct-by-construction adaptive cruise control: Two approaches
Nilsson, P., Hussien, O., Balkan, A., Chen, Y ., Ames, A., Grizzle, J., Ozay, N., Peng, H., Tabuada, P., 2016. Correct-by-construction adaptive cruise control: Two approaches. IEEE Trans. Control Systems Technol- ogy 24, 1294–1307
work page 2016
-
[31]
Pomprapa, A., Alfocea, S.R., Göbel, C., Misgeld, B.J., Leonhardt, S.,
-
[32]
Funnel control for oxygenation during artificial ventilation therapy, in: Proceedings of the 19th IFAC World Congress, Cape Town, South Africa. pp. 6575–6580
-
[33]
Periodic funnel-based control for peak inspiratory pressure, in: Proc
Pomprapa, A., Weyer, S., Leonhardt, S., Walter, M., Misgeld, B., 2015. Periodic funnel-based control for peak inspiratory pressure, in: Proc. 54th IEEE Conf. Decis. Control, Osaka, Japan, pp. 5617–5622
work page 2015
-
[34]
On spacing policies for high- way vehicle automation
Santhanakrishnan, K., Rajamani, R., 2003. On spacing policies for high- way vehicle automation. IEEE Trans. Intelligent Transp. Systems 4, 198– 204
work page 2003
-
[35]
Electrical drive DC link power flow con- trol with adaptive approach, in: Proc
Senfelds, A., Paugurs, A., 2014. Electrical drive DC link power flow con- trol with adaptive approach, in: Proc. 55th Int. Sci. Conf. Power Electr. Engg. Riga Techn. Univ., Riga, Latvia, pp. 30–33
work page 2014
-
[36]
Ordinary Differential Equations
Walter, W., 1998. Ordinary Differential Equations. Springer-Verlag, New York
work page 1998
-
[37]
A comprehensive review of the development of adaptive cruise control systems
Xiao, L., Gao, F., 2010. A comprehensive review of the development of adaptive cruise control systems. Vehicle System Dynamics 48, 1167– 1192
work page 2010
-
[38]
Nonlinear spacing policies for automated heavy-duty vehicles
Yanakiev, D., Kanellakopoulos, I., 1998. Nonlinear spacing policies for automated heavy-duty vehicles. IEEE Trans. Vehicular Technology 47, 1365–1377. 13
work page 1998
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.