A Single-Loop Minorized Dual Decomposition Method for Nonsmooth Multi-Stage Stochastic Programming
Pith reviewed 2026-06-26 15:54 UTC · model grok-4.3
The pith
A single-loop minorized dual decomposition method converges globally for nonsmooth multi-stage stochastic programs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
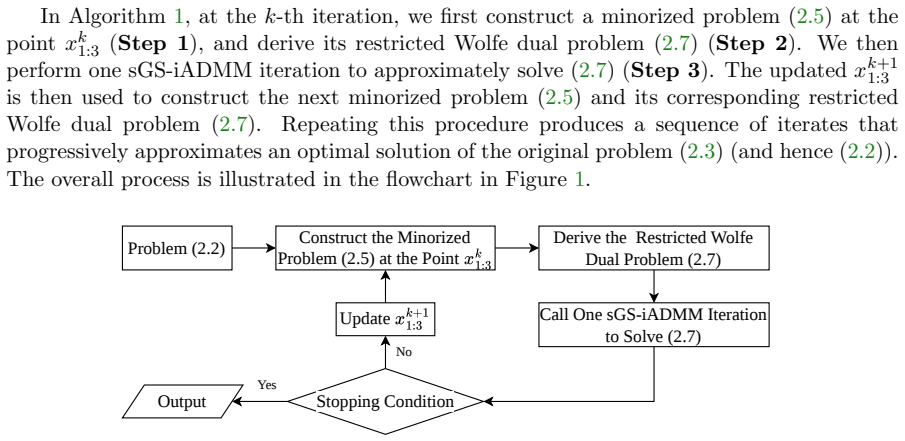
The method constructs a minorized subproblem and its restricted Wolfe dual at each step, then performs one iteration of the symmetric Gauss-Seidel based inexact ADMM on the dual to produce the next iterate. The updates preserve the intrinsic decomposable structure of the MSP problem. Global convergence of the generated iterates is established for the three-stage case, with the corresponding theorem extended to the general multi-stage setting.
What carries the argument
The single-loop minorized dual decomposition method that performs one iteration of symmetric Gauss-Seidel inexact ADMM on the restricted Wolfe dual of a minorized problem while preserving stage-wise and scenario-wise decomposability.
Load-bearing premise
The minorized subproblem and its restricted Wolfe dual, when updated with one iteration of symmetric Gauss-Seidel inexact ADMM, produce iterates whose convergence can be established under the stage-wise and scenario-wise decomposable structure of the MSP problem.
What would settle it
A concrete three-stage stochastic program instance with nonsmooth objectives on which the generated iterates fail to converge to a solution would falsify the global convergence claim.
Figures
read the original abstract
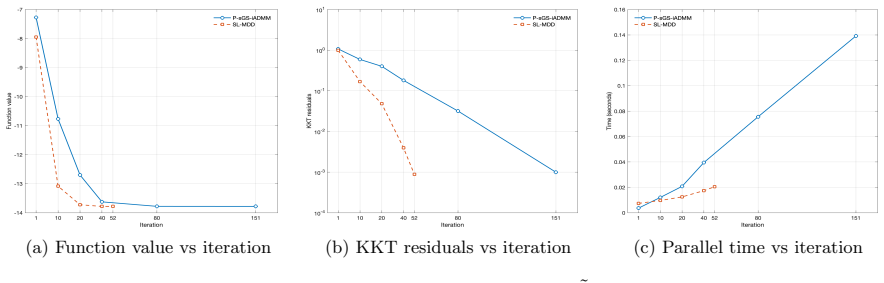
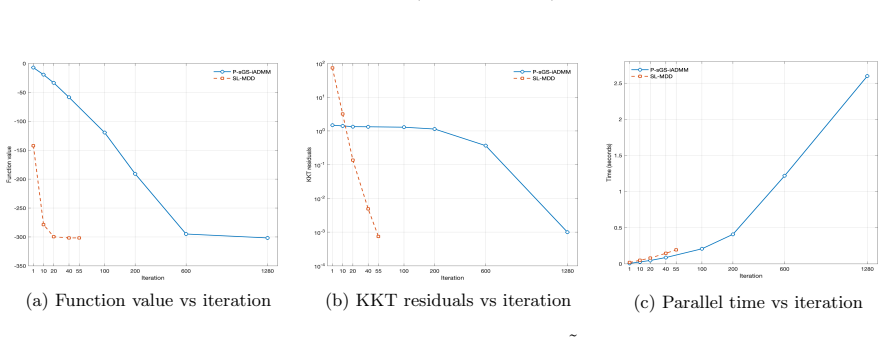
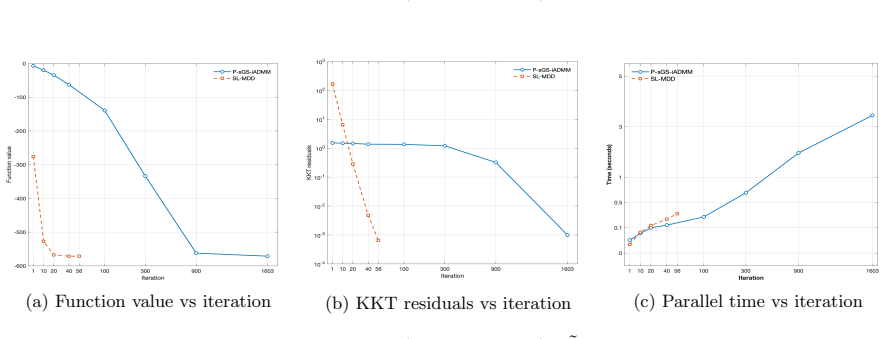
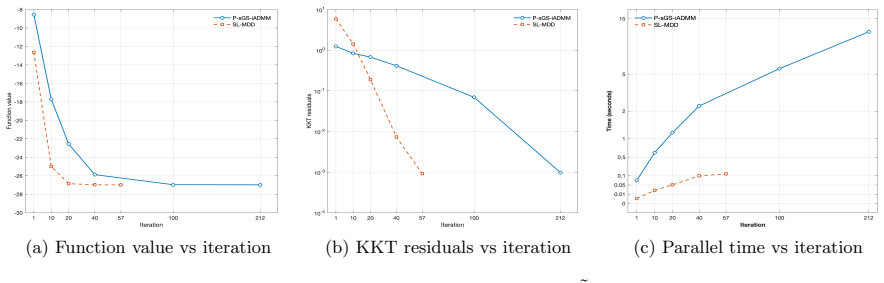
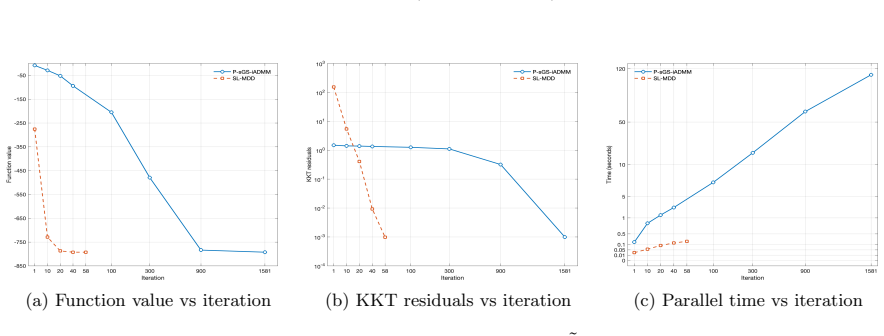
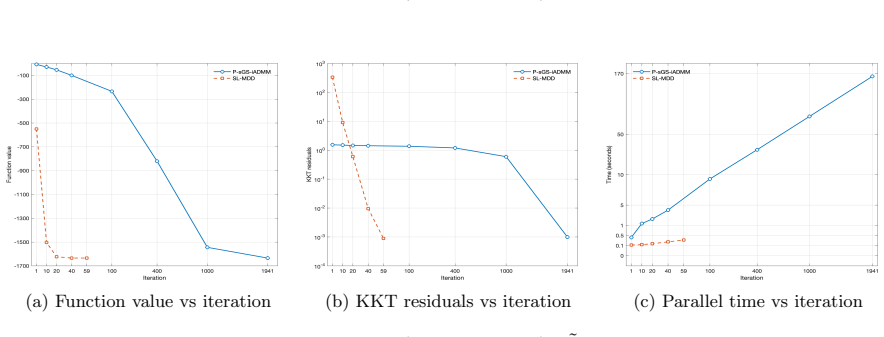
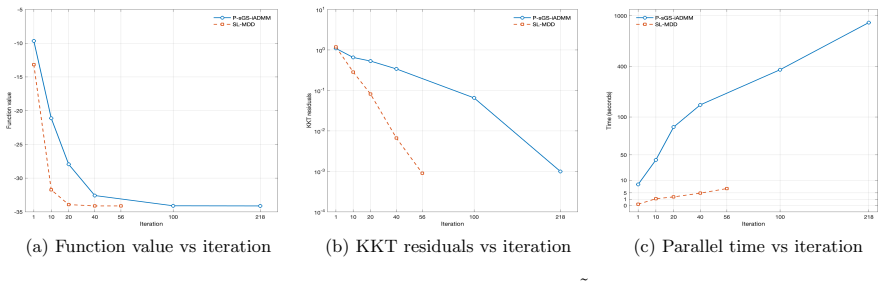
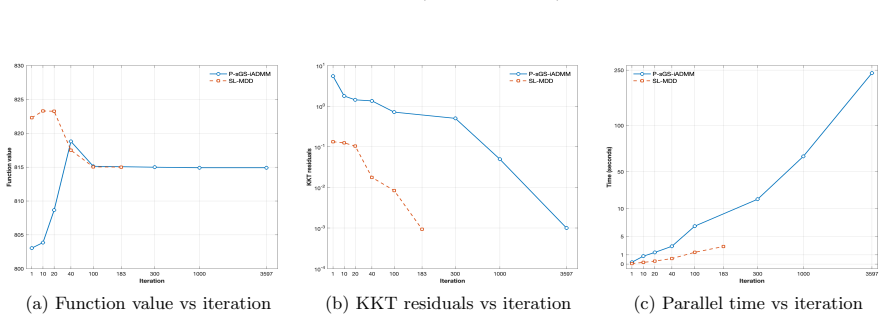
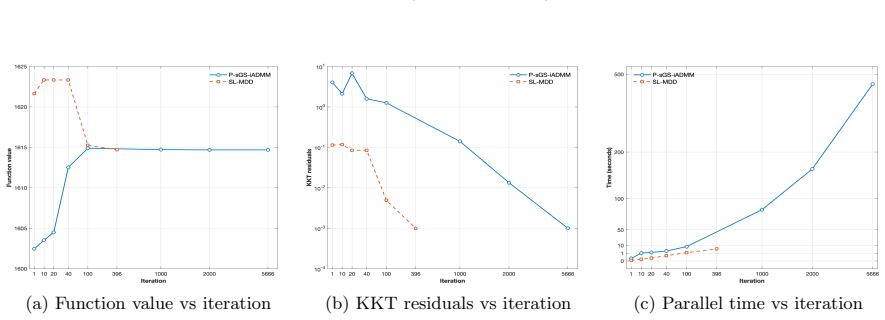
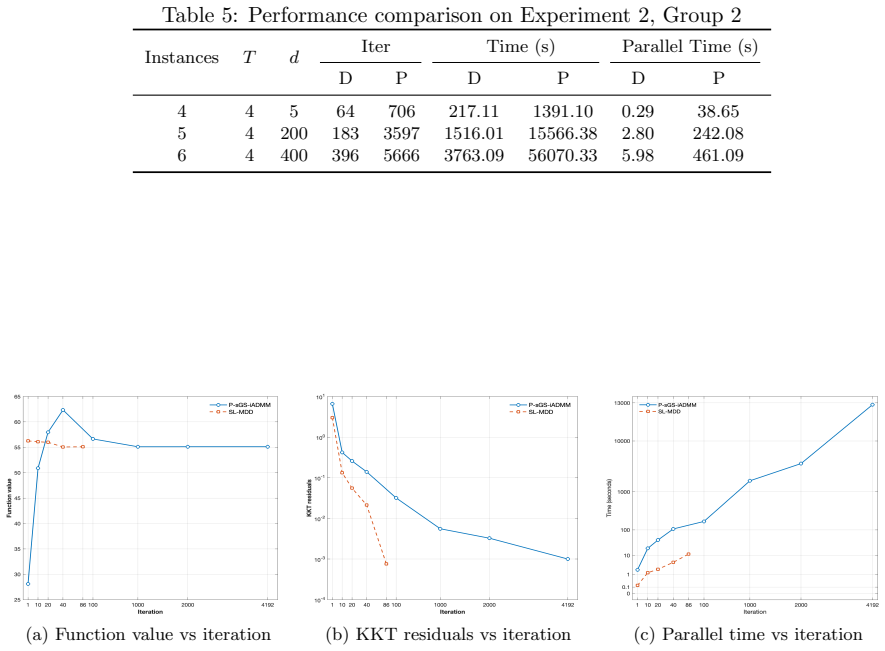
In this paper, we study multi-stage stochastic programming (MSP) problems with nonsmooth composite objectives. Tailored to their intrinsic stage-wise and scenario-wise structure, we develop a single-loop minorized dual decomposition method, in which each iteration constructs a minorized problem and its restricted Wolfe dual, and then performs \textit{one iteration} of the symmetric Gauss--Seidel based inexact alternating direction method of multipliers on the resulting dual problem to generate the next iterate. A key feature of the proposed optimization framework is that the resulting updates preserve the stage-wise and scenario-wise decomposable structure of the MSP problem and are suitable for parallel implementation. We establish global convergence of the generated iterates for the three-stage case and further establish the corresponding global convergence theorem for the general multi-stage setting. Numerical experiments illustrate the computational viability of the proposed framework and its favorable scaling behavior with respect to the stage-wise and scenario-wise structure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a single-loop minorized dual decomposition algorithm for nonsmooth multi-stage stochastic programs. At each iteration a minorized subproblem and its restricted Wolfe dual are formed; a single symmetric Gauss-Seidel iteration of inexact ADMM is then applied to the dual, producing an update that preserves stage-wise and scenario-wise decomposability. Global convergence of the iterates is claimed for the three-stage case, with an inductive extension asserted for the general multi-stage setting. Numerical results illustrate practical performance and scaling.
Significance. If the stated convergence theorems hold, the framework would supply a structure-preserving, parallelizable single-loop method for a practically important class of nonsmooth MSP problems. The explicit use of one inexact ADMM step while retaining global convergence guarantees is a noteworthy technical feature.
major comments (2)
- [proof of the general multi-stage convergence theorem] The global convergence theorem for the general multi-stage case (abstract and the corresponding theorem statement) rests on an inductive argument that transfers the sufficient-descent or Lyapunov inequality established for three stages to an arbitrary number of stages. It is not shown that the one-iteration symmetric Gauss-Seidel inexactness error remains controlled by constants independent of the number of stages and of the Lipschitz moduli of the nonsmooth terms; this step is load-bearing for the general claim.
- [three-stage convergence analysis] The three-stage convergence analysis (presumably the section establishing the base case) must verify that the minorized subproblem plus one restricted-Wolfe-dual ADMM step produces a uniform error bound compatible with the outer minorization sequence. Without an explicit statement of the admissible inexactness tolerance and its dependence on the stage-wise data, it is unclear whether the induction hypothesis can be closed.
minor comments (2)
- Notation for the restricted Wolfe dual and the symmetric Gauss-Seidel ordering should be introduced with an explicit algorithmic listing (e.g., Algorithm 1) rather than only in the text.
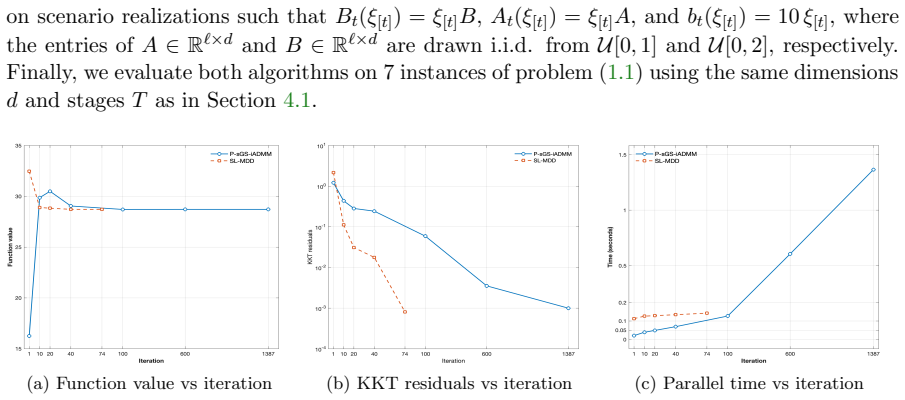
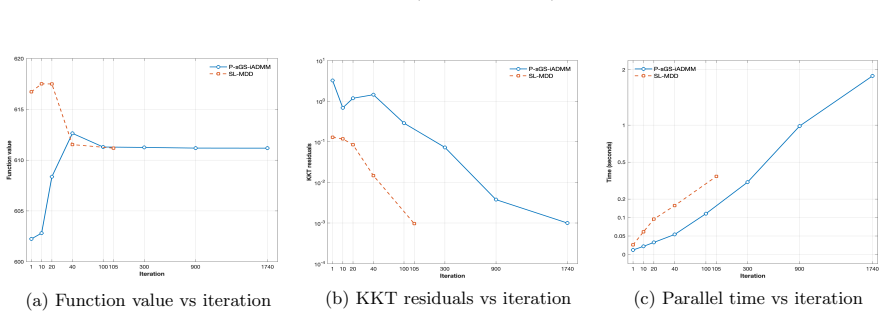
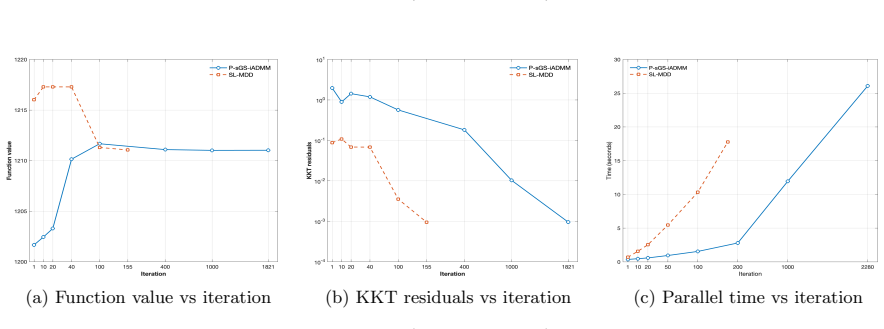
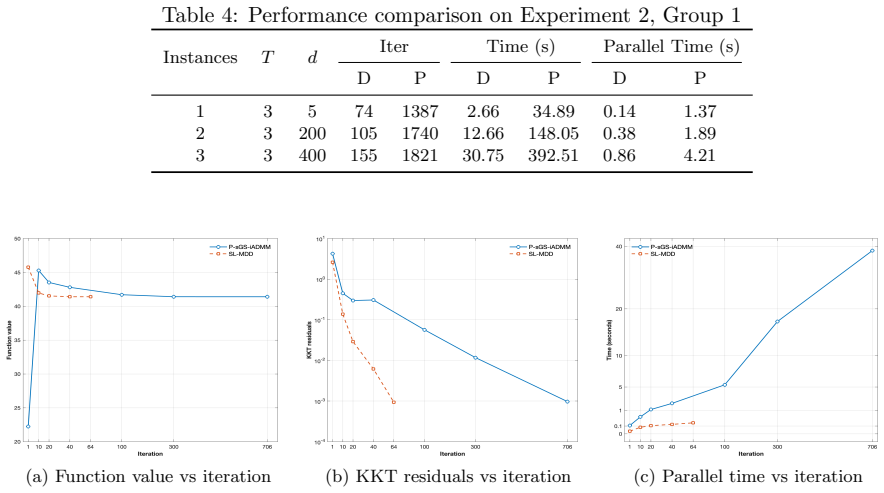
- The numerical section would benefit from a table reporting iteration counts and wall-clock times versus number of stages and scenarios to quantify the claimed scaling behavior.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable comments on our manuscript. We address the major comments point by point below and will make revisions to clarify the convergence analysis as needed.
read point-by-point responses
-
Referee: [proof of the general multi-stage convergence theorem] The global convergence theorem for the general multi-stage case (abstract and the corresponding theorem statement) rests on an inductive argument that transfers the sufficient-descent or Lyapunov inequality established for three stages to an arbitrary number of stages. It is not shown that the one-iteration symmetric Gauss-Seidel inexactness error remains controlled by constants independent of the number of stages and of the Lipschitz moduli of the nonsmooth terms; this step is load-bearing for the general claim.
Authors: We agree that the control of the inexactness error in the inductive step is crucial. In the current manuscript, the error bound is established using the uniform boundedness of the dual variables and the properties of the minorized subproblems, which ensure the constants are independent of the number of stages. However, to address this concern explicitly, we will add a dedicated lemma in the revision that proves the inexactness tolerance can be chosen independently of the stage count and depends only on local Lipschitz constants in a way that closes the induction. revision: yes
-
Referee: [three-stage convergence analysis] The three-stage convergence analysis (presumably the section establishing the base case) must verify that the minorized subproblem plus one restricted-Wolfe-dual ADMM step produces a uniform error bound compatible with the outer minorization sequence. Without an explicit statement of the admissible inexactness tolerance and its dependence on the stage-wise data, it is unclear whether the induction hypothesis can be closed.
Authors: The three-stage analysis derives the error bound from the one-step ADMM update on the restricted Wolfe dual, using the strong convexity of the augmented Lagrangian and the minorization error. The admissible inexactness is tied to the minorization parameter sequence, which decreases appropriately. We will revise the manuscript to include an explicit statement of the tolerance and its dependence on the stage-wise Lipschitz moduli to make the base case clearer and facilitate the induction. revision: yes
Circularity Check
No circularity: convergence proofs rely on independent descent analysis and induction
full rationale
The paper constructs the minorized dual decomposition method from standard ADMM and Wolfe dual techniques applied to the MSP structure. Global convergence for the three-stage case is established via a Lyapunov inequality or sufficient-descent property under the one-iteration symmetric Gauss-Seidel inexact ADMM update. The general multi-stage case extends this by induction on the number of stages, preserving the same error bounds and decomposability. No step reduces by definition to its inputs, no parameters are fitted and relabeled as predictions, and any self-citations are not load-bearing for the central claims. The derivation is self-contained against external benchmarks such as standard inexact ADMM convergence theory.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard assumptions on the MSP problem (convexity, properness, and decomposability) that enable the minorized dual to preserve structure and allow convergence analysis.
Reference graph
Works this paper leans on
-
[1]
Arp´ on, T
S. Arp´ on, T. Homem-de Mello, and B. K. Pagnoncelli. An ADMM algorithm for two-stage stochastic programming problems.Ann. Oper. Res., 286(1):559–582, 2020
2020
-
[2]
H. H. Bauschke and P. L. Combettes.Convex Analysis and Monotone Operator Theory in Hilbert Spaces. Springer, 2011
2011
-
[3]
L. Chen, D. F. Sun, and K.-C. Toh. An efficient inexact symmetric Gauss–Seidel based majorized ADMM for high-dimensional convex composite conic programming.Math. Program., 161(1):237–270, 2017
2017
-
[4]
L. Chen, D. F. Sun, K.-C. Toh, and N. Zhang. A unified algorithmic framework of sym- metric Gauss-Seidel decomposition based proximal ADMMs for convex composite pro- gramming.J. Comput. Math., 37(6):739–757, 2019. 30
2019
-
[5]
F. H. Clarke.Optimization and Nonsmooth Analysis. SIAM, 1990
1990
-
[6]
Y. H. Dai, D. Han, X. Yuan, and W. Zhang. A sequential updating scheme of the Lagrange multiplier for separable convex programming.Math. Comp., 86(303):315–343, 2017
2017
-
[7]
G. B. Dantzig and G. Infanger. Multi-stage stochastic linear programs for portfolio opti- mization.Ann. Oper. Res., 45(1):59–76, 1993
1993
-
[8]
Ding, X.-Y
K.-Y. Ding, X.-Y. Lam, and K.-C. Toh. On proximal augmented Lagrangian based de- composition methods for dual block-angular convex composite programming problems. Comput. Optim. Appl., 86(1):117–161, 2023
2023
-
[9]
Y. Guan, S. Ahmed, and G. L. Nemhauser. Cutting planes for multistage stochastic integer programs.Oper. Res., 57(2):287–298, 2009
2009
-
[10]
V. Guigues. Inexact cuts in stochastic dual dynamic programming.SIAM J. Optim., 30(1):407–438, 2020
2020
-
[11]
Guigues, R
V. Guigues, R. Monteiro, and B. Svaiter. Inexact cuts in stochastic dual dynamic pro- gramming applied to multistage stochastic nondifferentiable problems.SIAM J. Optim., 31(3):2084–2110, 2021
2084
-
[12]
Jiang, X
F. Jiang, X. Cai, Z. Wu, and D. Han. Approximate first-order primal-dual algorithms for saddle point problems.Math. Comp., 90(329):1227–1262, 2021
2021
-
[13]
Z.-F. Jin, Y. Fan, Y. Shang, and W. Ding. A dual symmetric Gauss-Seidel technique-based proximal ADMM for robust fused Lasso estimation.Numer. Algorithms, 98(3):1337–1360, 2025
2025
-
[14]
S. M. G. Khalilabadi, S. H. Zegordi, and E. Nikbakhsh. A multi-stage stochastic pro- gramming approach for supply chain risk mitigation via product substitution.Comput. Ind. Eng., 149:106786, 2020
2020
-
[15]
X.-Y. Lam, D. F. Sun, and K.-C. Toh. Semi-proximal augmented Lagrangian-based de- composition methods for primal block-angular convex composite quadratic conic program- ming problems.INFORMS J. Optim., 3(3):254–277, 2021
2021
-
[16]
Lan and A
G. Lan and A. Shapiro. Numerical methods for convex multistage stochastic optimization. Found. Trends Optim., 6(2):63–144, 2024
2024
-
[17]
Lan and Z
G. Lan and Z. Zhou. Dynamic stochastic approximation for multi-stage stochastic opti- mization.Math. Program., 187(1):487–532, 2021
2021
-
[18]
X. Li, D. F. Sun, and K.-C. Toh. QSDPNAL: A two-phase augmented Lagrangian method for convex quadratic semidefinite programming.Math. Program. Comput., 10(4):703–743, 2018
2018
-
[19]
X. Li, D. F. Sun, and K.-C. Toh. A block symmetric Gauss–Seidel decomposition theo- rem for convex composite quadratic programming and its applications.Math. Program., 175:395–418, 2019
2019
-
[20]
J. M. Mulvey and B. Shetty. Financial planning via multi-stage stochastic optimization. Comput. Oper. Res., 31(1):1–20, 2004. 31
2004
-
[21]
Nickel, F
S. Nickel, F. Saldanha-da Gama, and H. P. Ziegler. A multi-stage stochastic supply network design problem with financial decisions and risk management.Omega, 40(5):511– 524, 2012
2012
-
[22]
V. I. Norkin, G. C. Pflug, and A. Ruszczy´ nski. A branch and bound method for stochastic global optimization.Math. Program., 83(1):425–450, 1998
1998
-
[23]
C. S. Pedersen and S. E. Satchell. Utility functions whose parameters depend on initial wealth.Bull. Econ. Res., 55(4):357–371, 2003
2003
-
[24]
M. V. F. Pereira and L. M. V. G. Pinto. Multi-stage stochastic optimization applied to energy planning.Math. Program., 52(1):359–375, 1991
1991
-
[25]
R. T. Rockafellar and R. J.-B. Wets. Scenarios and policy aggregation in optimization under uncertainty.Math. Oper. Res., 16(1):119–147, 1991
1991
-
[26]
Shapiro, D
A. Shapiro, D. Dentcheva, and A. Ruszczy´ nski.Lectures on Stochastic Programming: Modeling and Theory. SIAM, 2021
2021
-
[27]
Stranieri, E
F. Stranieri, E. Fadda, and F. Stella. Combining deep reinforcement learning and multi- stage stochastic programming to address the supply chain inventory management problem. Int. J. Prod. Econ., 268:109099, 2024
2024
-
[28]
D. F. Sun, K.-C. Toh, and L. Yang. A convergent 3-block semiproximal alternating direction method of multipliers for conic programming with 4-type constraints.SIAM J. Optim., 25(2):882–915, 2015
2015
-
[29]
L. Yang, J. Li, D. F. Sun, and K.-C. Toh. A fast globally linearly convergent algorithm for the computation of Wasserstein barycenters.J. Mach. Learn. Res., 22(21):1–37, 2021
2021
-
[30]
Zhang, J
N. Zhang, J. Wu, and L. Zhang. A linearly convergent majorized ADMM with indefinite proximal terms for convex composite programming and its applications.Math. Comp., 89(324):1867–1894, 2020
2020
-
[31]
J. Zou, S. Ahmed, and X. A. Sun. Stochastic dual dynamic integer programming.Math. Program., 175(1):461–502, 2019. 32
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.