Invertible Neural Network Adapter for One-Step Flow Matching in Robot Manipulation
Pith reviewed 2026-06-26 20:28 UTC · model grok-4.3
The pith
An invertible neural network adapter constrains flow-matching trajectories to enable precise one-step robot action generation from multimodal inputs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Built upon a flow-matching formulation, the proposed adapter effectively constrains the action generation trajectory within an invertible latent space, thereby enabling efficient and high-quality dexterous action synthesis with only a single inference step.
What carries the argument
Invertible neural network adapter that maps multimodal observations into a reversible latent representation for single-pass flow matching.
If this is right
- Inference complexity is substantially reduced relative to conventional iterative flow-matching policies.
- Action prediction accuracy and stability remain strong across diverse manipulation tasks.
- Simulation benchmarks show consistent superior or near state-of-the-art performance.
- Real-world VLA models obtain a measured reduction in average inference latency from 110 ms to 61 ms.
Where Pith is reading between the lines
- The same invertibility constraint could be applied to other high-dimensional conditional generation problems that currently rely on multi-step diffusion or flow models.
- Lower per-step latency may allow closed-loop control rates high enough for contact-rich or fast-moving manipulation without specialized hardware.
- Because the adapter is described as general, it could be attached to existing pretrained VLA backbones rather than requiring full retraining.
Load-bearing premise
Constraining trajectories inside an invertible latent space is enough to let flow matching recover precise high-dimensional actions without any iterative refinement.
What would settle it
On the same manipulation benchmarks, measure whether single-step outputs from the adapter exhibit materially higher action error or task failure rates than the iterative flow-matching baseline run to convergence.
Figures

read the original abstract
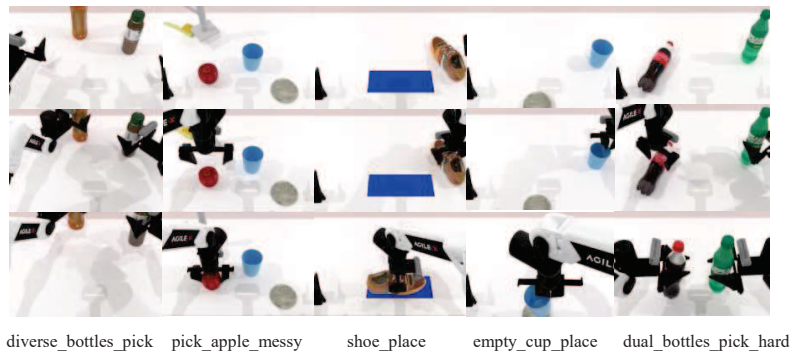
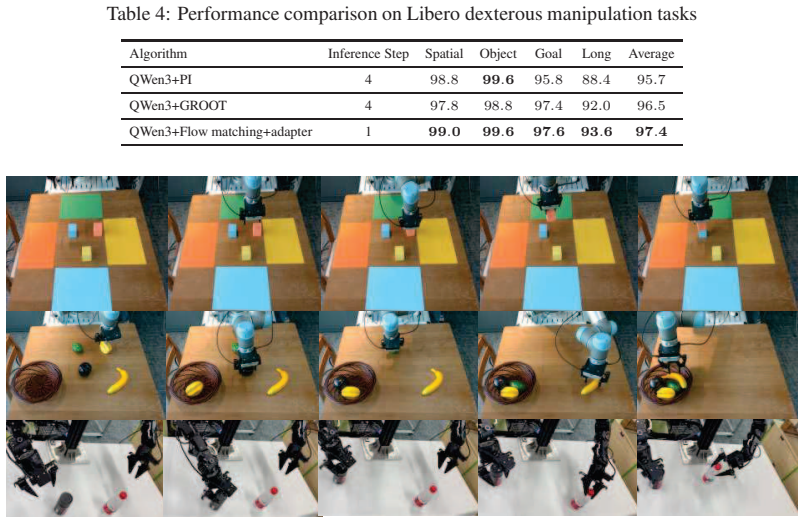
This paper presents an invertible neural network adapter for general robotic manipulation, designed to generate precise high-dimensional actions conditioned on multimodal observations, including visual, linguistic, and proprioceptive inputs, through a one-step denoising process. Built upon a flow-matching formulation, the proposed adapter effectively constrains the action generation trajectory within an invertible latent space, thereby enabling efficient and high-quality dexterous action synthesis with only a single inference step. Compared with conventional iterative flow-matching policies, the proposed framework substantially reduces inference complexity while maintaining strong action prediction accuracy and stability. Extensive experiments are conducted across a diverse set of simulation benchmarks and real-world robotic platforms to evaluate the effectiveness of the proposed method. Across simulation benchmarks, the proposed adapter consistently demonstrates superior or near state-of-the-art performance on a wide range of manipulation tasks. Furthermore, real-world experiments reveal a significant improvement in inference efficiency for vision-language-action (VLA) models, reducing the average inference latency from 110 ms to 61 ms while maintaining strong task performance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an invertible neural network adapter for flow-matching policies in robotic manipulation. Conditioned on multimodal inputs, the adapter maps actions into an invertible latent space so that the flow-matching ODE can be integrated accurately in a single step rather than iteratively, yielding high-dimensional dexterous actions with substantially lower inference latency (110 ms to 61 ms) while preserving task performance; the method is evaluated on simulation benchmarks and real-world platforms.
Significance. If the one-step claim is rigorously supported, the adapter would offer a practical route to real-time flow-matching policies for high-DoF manipulation and VLA models, where iterative integration has been a bottleneck. The reported latency halving without apparent loss of accuracy would be a notable engineering contribution if backed by velocity-field analysis and controlled experiments.
major comments (2)
- [Abstract / §3] Abstract / §3 (method): the central assertion that constraining the trajectory to an invertible latent space 'enables efficient and high-quality dexterous action synthesis with only a single inference step' is not accompanied by the explicit form of the velocity network, any bound on its Lipschitz constant or curvature, or an integration-error analysis showing why one Euler/Heun step suffices in 20–100-dimensional action spaces. Invertibility alone supplies bijectivity but no guarantee on the numerical properties required for single-step accuracy.
- [Experiments] Experiments section: the abstract states 'superior or near state-of-the-art performance' and 'strong task performance' across simulation and real-world tasks, yet supplies no baseline descriptions, metric definitions, trial counts, variance estimates, or ablation isolating the effect of the one-step adapter versus the invertible mapping itself. Without these, the performance claims cannot be assessed.
minor comments (2)
- [§3] Notation for the adapter and latent-space mapping should be introduced with explicit equations early in the method section to allow readers to verify the claimed invertibility.
- [Real-world experiments] The real-world latency numbers (110 ms to 61 ms) should specify the hardware, batch size, and whether the measurement includes observation encoding or only the flow step.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and commit to revisions that strengthen the theoretical justification and experimental reporting without altering the core claims.
read point-by-point responses
-
Referee: [Abstract / §3] Abstract / §3 (method): the central assertion that constraining the trajectory to an invertible latent space 'enables efficient and high-quality dexterous action synthesis with only a single inference step' is not accompanied by the explicit form of the velocity network, any bound on its Lipschitz constant or curvature, or an integration-error analysis showing why one Euler/Heun step suffices in 20–100-dimensional action spaces. Invertibility alone supplies bijectivity but no guarantee on the numerical properties required for single-step accuracy.
Authors: We agree that the manuscript would benefit from a more explicit theoretical treatment. In the revision we will add the explicit form of the velocity network (currently implicit in §3) together with a short integration-error analysis. The analysis will show that the invertible adapter maps the action trajectory into a latent space whose velocity field has reduced curvature relative to the original action space, thereby keeping the local truncation error of a single Euler/Heun step below the tolerance required for the reported task performance. We will also state the Lipschitz bound that follows from the architecture of the adapter. revision: yes
-
Referee: [Experiments] Experiments section: the abstract states 'superior or near state-of-the-art performance' and 'strong task performance' across simulation and real-world tasks, yet supplies no baseline descriptions, metric definitions, trial counts, variance estimates, or ablation isolating the effect of the one-step adapter versus the invertible mapping itself. Without these, the performance claims cannot be assessed.
Authors: The referee correctly identifies gaps in experimental documentation. The revised manuscript will expand the Experiments section to include: (i) explicit descriptions and citations for all baselines, (ii) precise definitions of every reported metric, (iii) the number of independent trials and random seeds used, (iv) standard-deviation or confidence-interval estimates, and (v) an ablation that decouples the contribution of the one-step inference schedule from the invertible mapping itself. These additions will be placed in the main text and supplementary material as appropriate. revision: yes
Circularity Check
No significant circularity; claims rest on experimental evaluation
full rationale
The provided abstract and description contain no derivation chain, equations, or self-referential definitions that reduce a claimed result to its own inputs by construction. The central claim (one-step flow matching via invertible adapter) is presented as an empirical outcome validated across simulation and real-world benchmarks, with latency and accuracy numbers reported as measured results rather than tautological predictions. No self-citation load-bearing steps, fitted inputs renamed as predictions, or ansatz smuggling are identifiable in the given text. This is the expected non-finding for a methods paper whose primary support is external evaluation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
H. Wang, W . Zhao, X. Wang, S. Huang, H. Lin, B. Zheng, R. Xu, G. Wang, Y . Mu, H. Wang, et al. Dexjoco: A benchmark and toolkit for task-oriented de xterous manipulation on mujoco. arXiv preprint arXiv:2605.16257 , 2026
Pith/arXiv arXiv 2026
-
[2]
Y . Sun, M. Cao, P . Y ang, R. Xu, Y . Y an, R. Xu, L. Ma, R. Gan, A. Zhai, Q. Chen, et al. Maniparena: Comprehensive real-world evaluation of reaso ning-oriented generalist robot ma- nipulation. arXiv preprint arXiv:2603.28545 , 2026. 8
arXiv 2026
-
[3]
J. Zhang, K. Wang, R. Xu, G. Zhou, Y . Hong, X. Fang, Q. Wu, Z. Zhang, and W . He. Navid: Video-based vlm plans the next step for vision-and-language navigation. arXiv preprint arXiv:2402.15852, 2024
Pith/arXiv arXiv 2024
-
[4]
X. Han, S. Chen, Z. Fu, Z. Feng, L. Fan, D. An, C. Wang, L. Guo , W . Meng, X. Zhang, et al. Multimodal fusion and vision-language models: A surv ey for robot vision. Information Fusion, page 103652, 2025
2025
-
[5]
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song. Diffusion policy: Visuomotor policy learning via action diffusion. The International Journal of Robotics Research, 44(10-11):1684–1704, 2025
2025
-
[6]
Z. Hu, S. Zhou, Q. Zhang, R. Xu, Q. Su, and C.-J. Liang. Anys lot: Goal-conditioned vision- language-action policies for zero-shot slot-level placem ent. arXiv preprint arXiv:2604.10432 , 2026
Pith/arXiv arXiv 2026
-
[7]
K. Zhang, J. Zhang, R. Xu, Y . Sun, S. Xue, Y . Wen, X. Guo, M. Guo, W . Liufu, L. Zihou, et al. A1: A fully transparent open-source, adaptive and efficient truncated vision-language-action model. arXiv preprint arXiv:2604.05672 , 2026
Pith/arXiv arXiv 2026
-
[8]
R. Xu, J. Zhang, M. Guo, Y . Wen, H. Y ang, M. Lin, J. Huang, Z. Li, K. Zhang, L. Wang, et al. A0: An affordance-aware hierarchical model for general rob otic manipulation. In Proceedings of the IEEE/CVF International Conference on Computer Visio n, pages 13491–13501, 2025
2025
-
[9]
L. Ma, J. Wen, M. Lin, R. Xu, X. Liang, B. Lin, J. Ma, Y . Wang, Z. Wei, H. Lin, et al. Phyblock: A progressive benchmark for physical understand ing and planning via 3d block assembly. arXiv preprint arXiv:2506.08708 , 2025
arXiv 2025
- [10]
-
[11]
Y . Lipman, R. T. Chen, H. Ben-Hamu, M. Nickel, and M. Le. F low matching for generative modeling. arXiv preprint arXiv:2210.02747 , 2022
Pith/arXiv arXiv 2022
-
[12]
E. Chisari, N. Heppert, M. Argus, T. Welschehold, T. Bro x, and A. V alada. Learning robotic manipulation policies from point clouds with conditional fl ow matching. arXiv preprint arXiv:2409.07343, 2024
arXiv 2024
-
[13]
K. Black, N. Brown, D. Driess, A. Esmail, M. Equi, C. Finn , N. Fusai, L. Groom, K. Hausman, B. Ichter, et al. pi0: A vision-language-action flow model fo r general robot control. arXiv preprint arXiv:2410.24164, 2024
Pith/arXiv arXiv 2024
-
[14]
Braun, N
M. Braun, N. Jaquier, L. Rozo, and T. Asfour. Riemannian flow matching policy for robot mo- tion learning. In 2024 IEEE/RSJ International Conference on Intelligent Rob ots and Systems (IROS), pages 5144–5151. IEEE, 2024
2024
-
[15]
F. Zhang and M. Gienger. Affordance-based robot manipu lation with flow matching. arXiv preprint arXiv:2409.01083, 2024
arXiv 2024
-
[16]
G. Y an, J. Zhu, Y . Deng, S. Y ang, R.-Z. Qiu, X. Cheng, M. Me mmel, R. Krishna, A. Goyal, X. Wang, and D. Fox. ManiFlow: A general robot manipulation p olicy via consistency flow training. In Conference on Robot Learning (CoRL) , 2025
2025
-
[17]
Z. Geng, M. Deng, X. Bai, J. Z. Kolter, and K. He. Mean flows for one-step generative modeling. arXiv preprint arXiv:2505.13447 , 2025
Pith/arXiv arXiv 2025
-
[18]
X. Liu, C. Gong, and Q. Liu. Flow straight and fast: Learn ing to generate and transfer data with rectified flow. 2023. URL https://openreview.net/forum?id=XVjTT1nw5z. 9
2023
-
[19]
L. Dinh, D. Krueger, and Y . Bengio. Nice: Non-linear ind ependent components estimation. arXiv preprint arXiv:1410.8516 , 2014
Pith/arXiv arXiv 2014
-
[20]
T. Y u, D. Quillen, Z. He, R. C. Julian, K. Hausman, C. Finn , and S. Levine. Meta-world: A benchmark and evaluation for multi -task and meta reinforcement learning. In Conference on Robot Learning , 2019. URL https://api.semanticscholar.org/CorpusID:204852201
2019
-
[21]
B. Liu, Y . Zhu, C. Gao, Y . Feng, Q. Liu, Y . Zhu, and P . Stone. Libero: Benchmarking knowl- edge transfer for lifelong robot learning. arXiv preprint arXiv:2306.03310 , 2023
Pith/arXiv arXiv 2023
-
[22]
S. Bai, Y . Cai, R. Chen, K. Chen, X. Chen, Z. Cheng, L. Deng , W . Ding, C. Gao, C. Ge, W . Ge, Z. Guo, Q. Huang, J. Huang, F. Huang, B. Hui, S. Jiang, Z. Li, M. Li, M. Li, K. Li, Z. Lin, J. Lin, X. Liu, J. Liu, C. Liu, Y . Liu, D. Liu, S. Liu, D. Lu, R. Lu o, C. Lv, R. Men, L. Meng, X. Ren, X. Ren, S. Song, Y . Sun, J. Tang, J. Tu, J. Wan, P . Wang, P. ...
Pith/arXiv arXiv 2025
-
[23]
S. Community. Starvla: A lego-like codebase for vision -language-action model developing. arXiv preprint arXiv:2604.05014 , 2026
Pith/arXiv arXiv 2026
-
[24]
Physical Intelligence, Black, N
K. Physical Intelligence, Black, N. Brown, D. James, D. Karan, D. Driess, A. Esmail, M. Equi, C. Finn, N. Fusai, L. Groom, K. Hausman, B. Ichter, et al. pi0. 5: a vision-language-action model with open-world generalization. arXiv preprint arXiv:2504.16054 , 2025. 10
Pith/arXiv arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.