A Spiking Neural Architecture for Coordinating Arm and Locomotor Control
Pith reviewed 2026-06-27 13:10 UTC · model grok-4.3
The pith
A spiking neural architecture coordinates force-based arm control and bipedal locomotion on a simulated humanoid robot using a basal ganglia model for task switching.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
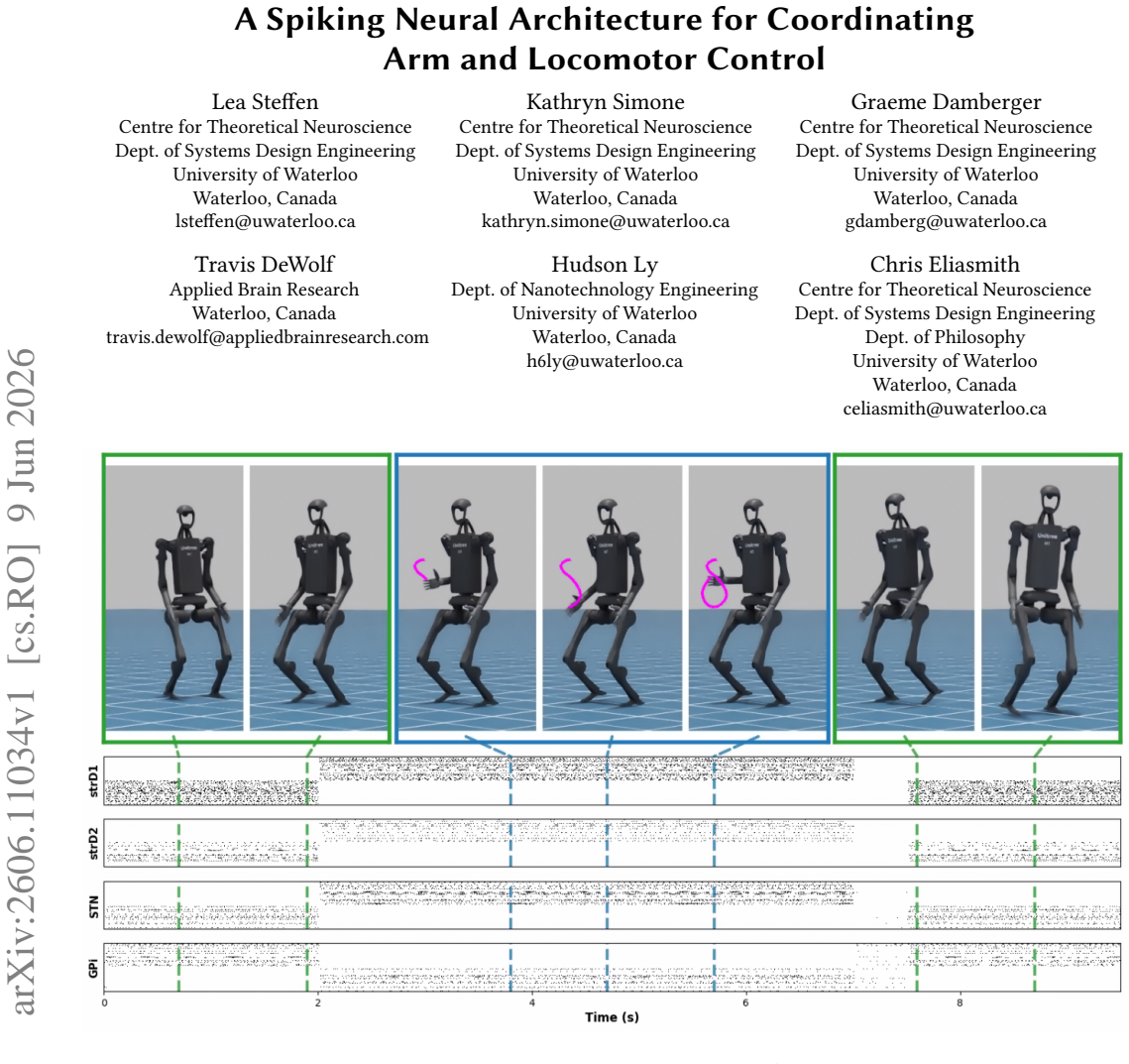
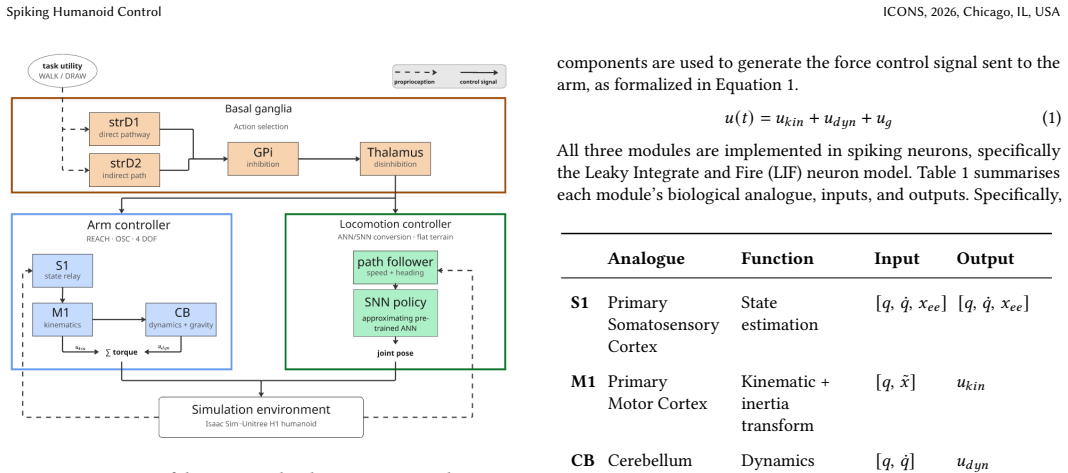
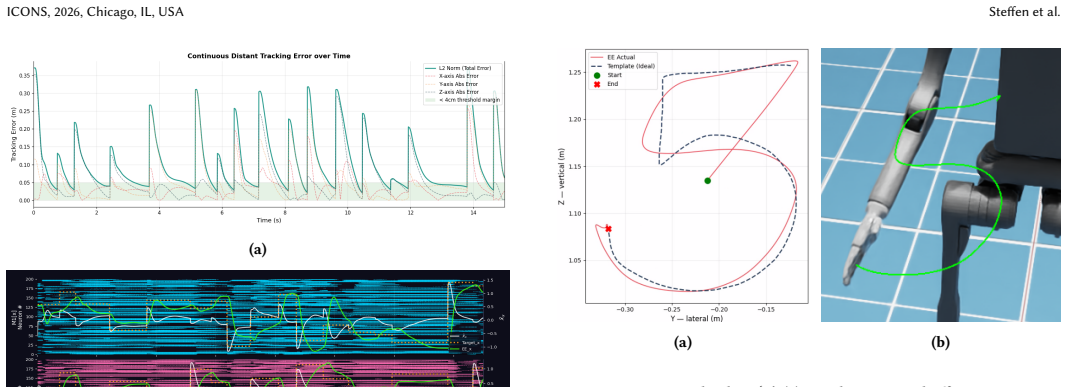
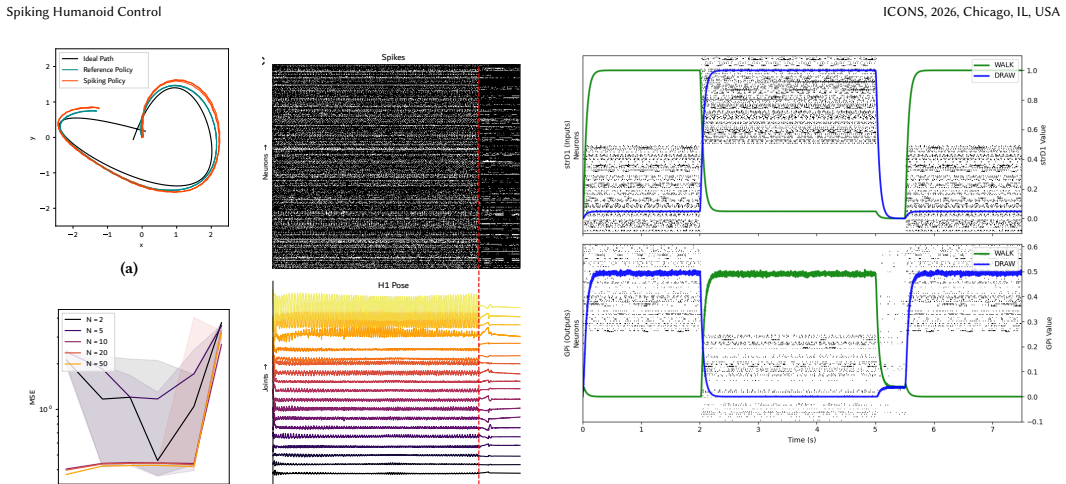
The paper demonstrates a spiking neural architecture that integrates force-based arm control and bipedal locomotion on a simulated full-scale humanoid platform. High-level action selection is handled by a biologically grounded spiking basal ganglia model. Validation through co-simulation demonstrates successful target reaching, continuous digit drawing, path-following locomotion, and switching between walking and arm control via basal ganglia disinhibition.
What carries the argument
A spiking basal ganglia model that mediates switching between locomotor and arm control tasks through disinhibition, integrated with spiking implementations of the motor controllers.
Load-bearing premise
The co-simulation between the neural simulator and the robot physics engine accurately represents real-world dynamics, sensor noise, and the basal ganglia's role in task switching.
What would settle it
Failure of the system to maintain stable walking or accurate reaching when the controller is transferred from simulation to a physical humanoid robot would indicate the claim does not hold.
Figures

read the original abstract
Spiking Neural Networks (SNNs) coupled with neuromorphic hardware offer energy-efficient solutions for humanoid robot control. However, existing SNN-based motor control systems address bipedal locomotion and arm control in isolation, leaving integrated control of both unaddressed. We present a spiking architecture that coordinates force-based arm control and bipedal locomotion in a simulated humanoid, using the Neural Engineering Framework (NEF) and Semantic Pointer Architecture (SPA). High-level action selection between locomotor and arm control is mediated by a biologically grounded spiking basal ganglia model. We validate the system through co-simulation of Nengo, for the neural control, and Isaac Sim, demonstrating successful target reaching, continuous digit drawing, path-following locomotion, and finally, switching between walking and arm control via basal ganglia disinhibition. To our knowledge, this is the first integrated spiking controller to combine bipedal locomotion and arm control on a full-scale humanoid platform. The full spike-based implementation enables future deployment on low-power neuromorphic hardware.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a spiking neural architecture using the Neural Engineering Framework (NEF), Semantic Pointer Architecture (SPA), and a biologically grounded spiking basal ganglia model to coordinate force-based arm control and bipedal locomotion on a simulated full-scale humanoid robot. It demonstrates target reaching, digit drawing, path-following locomotion, and switching between tasks via basal ganglia disinhibition through co-simulation with Nengo and Isaac Sim, claiming to be the first such integrated spiking controller.
Significance. If the integration and switching results hold under more rigorous testing, this would represent a meaningful engineering contribution as the first integrated spiking controller combining bipedal locomotion and arm control on a full-scale humanoid platform. The work builds explicitly on established prior frameworks (NEF, SPA, basal ganglia model) without introducing new fitted parameters, providing a concrete path toward neuromorphic hardware deployment.
major comments (2)
- [Abstract and validation description] Abstract and validation description: the central claim of successful coordination and clean switching (mediated by the basal ganglia model) rests on qualitative statements of 'successful' demonstrations in co-simulation; no quantitative metrics such as tracking error, success rates, interference measures between primitives, or baseline comparisons are reported, which is load-bearing for asserting that the architecture achieves integrated control without cross-talk.
- [Validation experiments] Validation experiments: the co-simulation is presented as sufficient validation, but no analysis is provided of robustness to unmodeled effects (contact forces, actuator delays, sensor noise) on the disinhibition signals or task interference; this directly affects the claim that the basal ganglia model ensures clean mediation between locomotion and arm control.
minor comments (1)
- [Abstract] The novelty claim ('to our knowledge, this is the first...') in the abstract would be strengthened by an explicit comparison to prior isolated locomotion or arm SNN controllers in a dedicated related-work section.
Simulated Author's Rebuttal
We thank the referee for their constructive comments, which highlight important aspects of validation for our integrated spiking controller. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and validation description] Abstract and validation description: the central claim of successful coordination and clean switching (mediated by the basal ganglia model) rests on qualitative statements of 'successful' demonstrations in co-simulation; no quantitative metrics such as tracking error, success rates, interference measures between primitives, or baseline comparisons are reported, which is load-bearing for asserting that the architecture achieves integrated control without cross-talk.
Authors: We agree that the current manuscript relies on qualitative descriptions of task success and switching. To address this, the revised version will include quantitative metrics computed from the existing co-simulations, such as end-effector position tracking error during reaching and digit drawing, path deviation error during locomotion, task completion success rates, and a measure of cross-talk (e.g., unintended movement in the non-selected subsystem during switching). Where data permits, we will also add simple baseline comparisons to non-integrated or non-spiking variants. revision: yes
-
Referee: [Validation experiments] Validation experiments: the co-simulation is presented as sufficient validation, but no analysis is provided of robustness to unmodeled effects (contact forces, actuator delays, sensor noise) on the disinhibition signals or task interference; this directly affects the claim that the basal ganglia model ensures clean mediation between locomotion and arm control.
Authors: This is a valid point regarding the strength of the claims about clean mediation. In revision we will add a dedicated discussion subsection on robustness, grounded in the biological properties of the basal ganglia model (e.g., its known tolerance to noise in disinhibition). We will also report results from additional targeted simulations that introduce controlled levels of contact force variation, actuator delay, and sensor noise to assess effects on switching reliability and task interference. A full parametric robustness study across all possible unmodeled effects is beyond the scope of this proof-of-concept paper, but the added analysis will directly support the mediation claim. revision: partial
Circularity Check
No circularity: engineering demonstration using established frameworks
full rationale
The paper describes an implementation that combines NEF, SPA, and a prior basal ganglia model for task switching, then shows results in Nengo-Isaac Sim co-simulation. No equations, fitted parameters, or predictions are presented that reduce to the inputs by construction. Novelty is asserted as the first integrated spiking controller on a full-scale humanoid, but this is an empirical claim about the system, not a derivation. Self-citations to the underlying frameworks are standard and not load-bearing for any mathematical result. The work is self-contained as an engineering demonstration.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The Neural Engineering Framework and Semantic Pointer Architecture are suitable for force-based motor control and high-level action representation.
- domain assumption A biologically grounded spiking basal ganglia model can mediate high-level action selection between locomotion and arm control via disinhibition.
Reference graph
Works this paper leans on
-
[1]
Stewart, Daniel Rasmussen, Xuan Choo, Aaron Voelker, and Chris Eliasmith
Trevor Bekolay, James Bergstra, Eric Hunsberger, Travis DeWolf, Terrence C. Stewart, Daniel Rasmussen, Xuan Choo, Aaron Voelker, and Chris Eliasmith. 2014. Nengo: a Python tool for building large-scale functional brain models.Frontiers in Neuroinfor- matics7 (Jan. 2014). doi:10.3389/fninf.2013.00048
-
[2]
Djork-Arné Clevert, Thomas Unterthiner, and Sepp Hochreiter. 2015. Fast and Accurate Deep Network Learning by Exponential Linear Units (ELUs). arXiv: Learning(Nov. 2015). https://www.semanticscholar.org/paper/Fast- and-Accurate-Deep-Network-Learning-by-Linear-Clevert-Unterthiner/ f63e917638553414526a0cc8550de4ad2d83fe7a
2015
-
[3]
R. de Azambuja, A. Cangelosi, and S. V. Adams. 2016. Diverse, noisy and parallel: a New Spiking Neural Network approach for humanoid robot control. In2016 Interna- tional Joint Conference on Neural Networks (IJCNN). 1134–1142. doi:10.1109/IJCNN. 2016.7727325 ISSN: 2161-4407
-
[4]
Travis DeWolf, Kinjal Patel, Pawel Jaworski, Roxana Leontie, Joe Hays, and Chris Eliasmith. 2023. Neuromorphic control of a simulated 7-DOF arm using Loihi.Neu- romorphic Computing and Engineering3, 1 (Feb. 2023), 014007. doi:10.1088/2634- 4386/acb286
-
[5]
Stewart, Jean-Jacques Slotine, and Chris Eliasmith
Travis DeWolf, Terrence C. Stewart, Jean-Jacques Slotine, and Chris Eliasmith. 2016. A spiking neural model of adaptive arm control.Proceedings of the Royal Society B: Biological Sciences283, 1843 (Nov. 2016), 20162134. doi:10.1098/rspb.2016.2134
-
[6]
Chris Eliasmith. 2013.How to Build a Brain: A Neural Architecture for Biological Cognition. Oxford University Press. doi:10.1093/acprof:oso/9780199794546.001.0001
work page doi:10.1093/acprof:oso/9780199794546.001.0001 2013
-
[7]
Anderson
Chris Eliasmith and Charles H. Anderson. 2003.Neural Engineering: Computation, Representation, and Dynamics in Neurobiological Systems. MIT Press. Google-Books- ID: J6jz9s4kbfIC
2003
-
[8]
Chris Eliasmith, Terrence C. Stewart, Xuan Choo, Trevor Bekolay, Travis DeWolf, Yichuan Tang, and Daniel Rasmussen. 2012. A Large-Scale Model of the Functioning Brain.Science338, 6111 (Nov. 2012), 1202–1205. doi:10.1126/science.1225266
-
[9]
Eric Hunsberger and Chris Eliasmith. 2016. Training Spiking Deep Networks for Neuromorphic Hardware. (2016). doi:10.13140/RG.2.2.10967.06566 arXiv:1611.05141 [cs]
-
[10]
isaac-sim. [n. d.]. H1FlatTerrainPolicy. https://github.com/isaac- sim/IsaacSim/blob/develop/source/extensions/isaacsim.robot.policy.examples/ isaacsim/robot/policy/examples/robots/h1.py
-
[11]
Xiaoyang Jiang, Qiang Zhang, Jingkai Sun, Jiahang Cao, Jingtong Ma, and Renjing Xu. 2025. Fully Spiking Neural Network for Legged Robots. InICASSP 2025 - 2025 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). 1–5. doi:10.1109/ICASSP49660.2025.10890793
-
[12]
Ashwin Sanjay Lele, Yan Fang, Justin Ting, and Arijit Raychowdhury. 2020. Learning to Walk: Bio-Mimetic Hexapod Locomotion via Reinforcement-Based Spiking Central Pattern Generation.IEEE Journal on Emerging and Selected Topics in Circuits and Systems10, 4 (Dec. 2020), 536–545. doi:10.1109/JETCAS.2020.3033135
-
[13]
2022.Human Standing Dynamic Balancing and Elementary Biolog- ical Signal Processing
Bálint Petró. 2022.Human Standing Dynamic Balancing and Elementary Biolog- ical Signal Processing. Ph.D. Budapest University of Technology and Economics (Hungary), Hungary. https://www.proquest.com/docview/3064677953/abstract/ FF9885C8D9C24159PQ/1
arXiv 2022
-
[14]
Ioannis Polykretis, Guangzhi Tang, Praveenram Balachandar, and Konstantinos P. Michmizos. 2022. A Spiking Neural Network Mimics the Oculomotor System to Control a Biomimetic Robotic Head Without Learning on a Neuromorphic Hardware. IEEE Transactions on Medical Robotics and Bionics4, 2 (May 2022), 520–529. doi:10. 1109/TMRB.2022.3155278
arXiv 2022
-
[15]
H. Rostro-Gonzalez, P. A. Cerna-Garcia, G. Trejo-Caballero, C. H. Garcia-Capulin, M. A. Ibarra-Manzano, J. G. Avina-Cervantes, and C. Torres-Huitzil. 2015. A CPG system based on spiking neurons for hexapod robot locomotion.Neurocomputing 170 (Dec. 2015), 47–54. doi:10.1016/j.neucom.2015.03.090
-
[16]
Terrence C Stewart, Xuan Choo, and Chris Eliasmith. [n. d.]. Dynamic Behaviour of a Spiking Model of Action Selection in the Basal Ganglia. ([n. d.])
-
[17]
Tokey Tahmid, Mark Gates, Piotr Luszczek, Catherine Schuman, Catherine Schuman, and Catherine Schuman. 2026. SpikeRL: A Scalable and Energy-efficient Framework for Deep Spiking Reinforcement Learning. doi:10.1109/ICONS69015.2025.00033
-
[18]
Guangzhi Tang, Neelesh Kumar, Raymond Yoo, and Konstantinos P. Michmizos. 2020. Deep Reinforcement Learning with Population-Coded Spiking Neural Network for Continuous Control. doi:10.48550/arXiv.2010.09635 arXiv:2010.09635 [cs]
-
[19]
J. Camilo Vasquez Tieck, Lea Steffen, Jacques Kaiser, Daniel Reichard, Arne Roennau, and Ruediger Dillmann. 2019. Combining Motor Primitives for Perception Driven Target Reaching With Spiking Neurons:.International Journal of Cognitive Informatics and Natural Intelligence13, 1 (Jan. 2019), 1–12. doi:10.4018/IJCINI.2019010101
-
[20]
Camilo Vasquez Tieck, Lea Steffen, Jacques Kaiser, Arne Roennau, and Rudiger Dillmann
J. Camilo Vasquez Tieck, Lea Steffen, Jacques Kaiser, Arne Roennau, and Rudiger Dillmann. 2018. Controlling a Robot Arm for Target Reaching without Planning Using Spiking Neurons. In2018 IEEE 17th International Conference on Cognitive Informatics & Cognitive Computing (ICCI*CC). IEEE, Berkeley, CA, 111–116. doi:10.1109/ICCI- CC.2018.8482049
-
[21]
Camilo Vasquez Tieck, Lea Steffen, Jacques Kaiser, Arne Roennau, and Rudiger Dill- mann
J. Camilo Vasquez Tieck, Lea Steffen, Jacques Kaiser, Arne Roennau, and Rudiger Dill- mann. 2018. Multi-Modal Motion Activation for Robot Control Using Spiking Neurons. In2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob). IEEE, Enschede, 291–298. doi:10.1109/BIOROB.2018.8487786
-
[22]
George-Iulian Uleru, Mircea Hulea, and Vasile-Ion Manta. 2022. Using Hebbian Learning for Training Spiking Neural Networks to Control Fingers of Robotic Hands. International Journal of Humanoid Robotics19, 06 (Dec. 2022), 2250024. doi:10.1142/ S0219843622500244
2022
-
[23]
2025.Proxy Target: Bridging the Gap Between Discrete Spiking Neural Networks and Continuous Control
Zijie Xu, Tong Bu, Zecheng Hao, Jianhao Ding, and Zhaofei yu. 2025.Proxy Target: Bridging the Gap Between Discrete Spiking Neural Networks and Continuous Control. doi:10.48550/arXiv.2505.24161
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.