A Taxonomy of Conceptual Alignment in Human-Robot Dialogue
Pith reviewed 2026-06-26 10:28 UTC · model grok-4.3
The pith
Conceptual alignment in human-robot dialogue is best treated as a bidirectional co-constructive process captured by a taxonomy of triggers and understanding levels.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
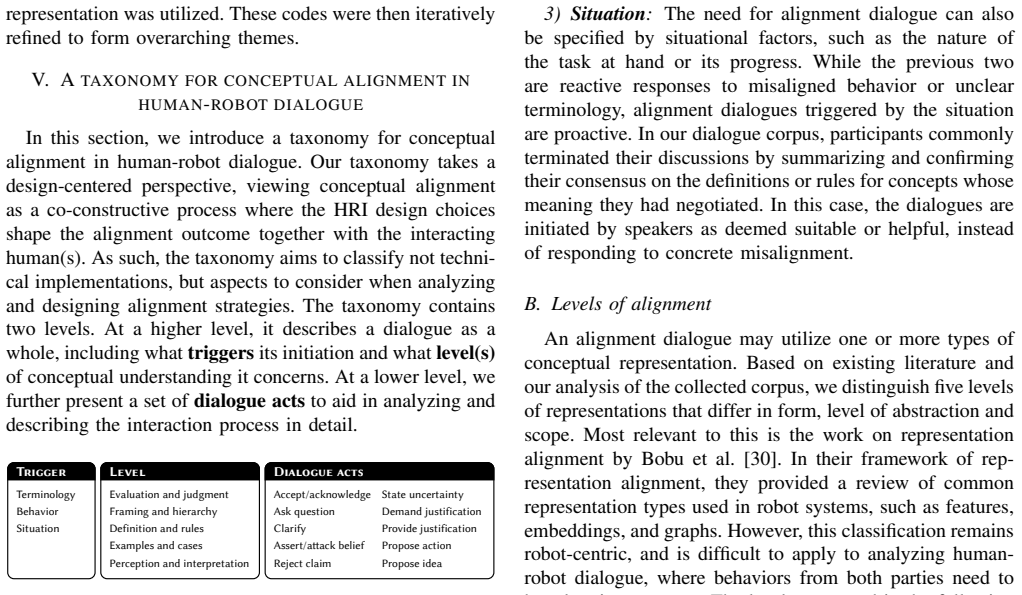
The paper argues for a design-centric understanding of conceptual alignment as a bidirectional and co-constructive process. It introduces a taxonomy that characterizes conceptual alignment dialogues along what triggers its initiation and what level(s) of conceptual understanding it concerns. It further presents a dialogue act schema as an operational tool that captures the interactional moves through which alignment is achieved. Together these provide a structured foundation for analyzing, comparing, and designing conceptual alignment in human-robot interaction.
What carries the argument
A taxonomy classifying conceptual alignment dialogues by initiation triggers and levels of conceptual understanding, combined with a dialogue act schema for tracking alignment moves.
Load-bearing premise
The taxonomy categories and dialogue act schema will provide a structured, usable foundation for analyzing, comparing, and designing conceptual alignment in human-robot interaction.
What would settle it
Observing that the taxonomy cannot consistently classify alignment instances across multiple human-robot dialogue corpora or that the schema does not lead to measurable improvements in alignment success rates when used in robot design.
Figures
read the original abstract
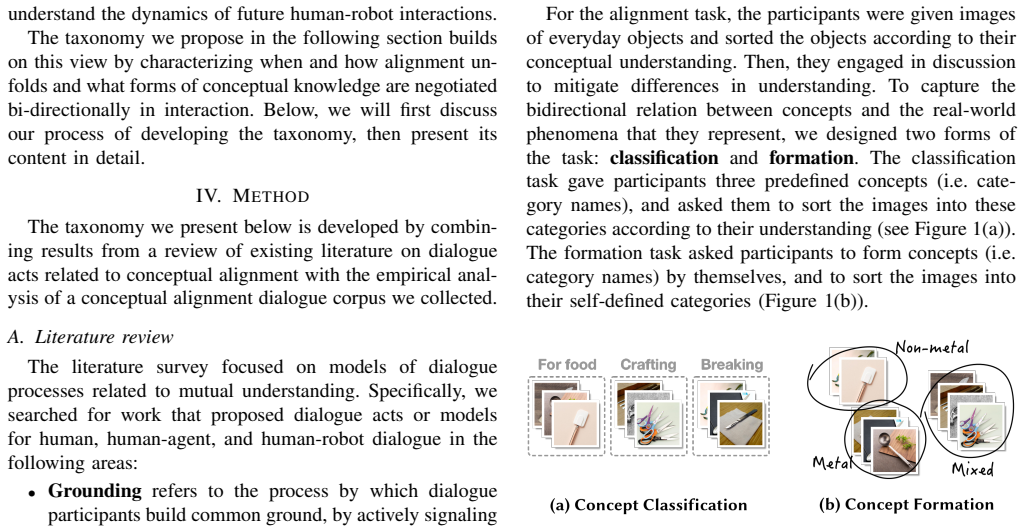
Successful conversations require speakers to align on the meaning of concepts, a challenging but crucial task for human-robot interaction. Understanding the process of establishing such alignment is hindered by competing interpretations of the term and isolated, unidirectional investigations of its design space. This paper argues for a design-centric understanding of conceptual alignment as a bidirectional and co-constructive process. We introduce a taxonomy that characterizes conceptual alignment dialogues along what triggers its initiation and what level(s) of conceptual understanding it concerns. We further present a dialogue act schema as an operational tool that captures the interactional moves through which alignment is achieved. Together, these contributions provide a structured foundation for analyzing, comparing, and designing conceptual alignment in human-robot interaction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper argues for a design-centric understanding of conceptual alignment in human-robot dialogue as a bidirectional and co-constructive process. It introduces a taxonomy characterizing conceptual alignment dialogues along two dimensions—what triggers initiation and what level(s) of conceptual understanding are involved—along with a dialogue act schema as an operational tool for capturing the interactional moves through which alignment is achieved. These are presented as together providing a structured foundation for analyzing, comparing, and designing conceptual alignment in HRI.
Significance. If the taxonomy and schema function as described, they could reduce fragmentation in HRI dialogue research by supplying a shared classificatory scheme and operational vocabulary, enabling more systematic comparison of existing work and more principled design of alignment mechanisms in robot dialogue systems.
major comments (1)
- [Abstract] Abstract (final sentence): The central claim that the taxonomy and dialogue act schema 'provide a structured foundation for analyzing, comparing, and designing conceptual alignment' is asserted without any application to sample dialogues, case studies, or validation of usability; this leaves the utility claim unsubstantiated and load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for their review and recommendation of minor revision. We address the single major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (final sentence): The central claim that the taxonomy and dialogue act schema 'provide a structured foundation for analyzing, comparing, and designing conceptual alignment' is asserted without any application to sample dialogues, case studies, or validation of usability; this leaves the utility claim unsubstantiated and load-bearing for the paper's contribution.
Authors: We agree with the observation. The manuscript is a conceptual contribution whose primary aim is to introduce the taxonomy (two dimensions: initiation triggers and levels of conceptual understanding) and the dialogue act schema as analytical and design tools. No sample dialogues or usability studies are included, so the utility claim in the abstract is indeed forward-looking rather than demonstrated within the paper. We will revise the final sentence of the abstract to read that the contributions 'offer a structured approach for analyzing, comparing, and designing conceptual alignment' (or equivalent wording that avoids asserting an already-realized foundation). This is a minor textual change that accurately reflects the scope of the work. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents a taxonomy of conceptual alignment dialogues (triggered by initiation factors and levels of understanding) plus an accompanying dialogue-act schema purely as a new classificatory framework. No equations, fitted parameters, predictions, or derivations appear anywhere in the manuscript. The central contribution is explicitly introduced as an independent organizing scheme rather than derived from prior results or self-citations; the argument is therefore self-contained by construction and carries no load-bearing circular steps.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Conceptual alignment in human-robot interaction is a bidirectional and co-constructive process rather than unidirectional.
invented entities (2)
-
Taxonomy of conceptual alignment dialogues
no independent evidence
-
Dialogue act schema
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Interactive Acquisition of Fine-grained Visual Concepts by Exploiting Semantics of Generic Characterizations in Discourse,
J. Park, A. Lascarides, and S. Ramamoorthy, “Interactive Acquisition of Fine-grained Visual Concepts by Exploiting Semantics of Generic Characterizations in Discourse,” inProceedings of the 15th Inter- national Conference on Computational Semantics, M. Amblard and E. Breitholtz, Eds. Nancy, France: Association for Computational Linguistics, June 2023, pp. 318–331
2023
-
[2]
Robot Concept Acquisition Based on Interaction Between Probabilistic and Deep Generative Models,
R. Kuniyasu, T. Nakamura, T. Taniguchi, and T. Nagai, “Robot Concept Acquisition Based on Interaction Between Probabilistic and Deep Generative Models,”Frontiers in Computer Science, vol. 3, Sept. 2021. [Online]. Available: https://www.scopus.com/inward/ record.uri?eid=2-s2.0-85117894920&doi=10.3389%2ffcomp.2021. 618069&partnerID=40&md5=eff3ee9b0230e939c9...
2021
-
[3]
”What’s this?
D. Gkatzia and F. Belvedere, “”What’s this?” Comparing Active learning Strategies for Concept Acquisition in HRI,” inCompanion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, ser. ACM/IEEE International Conference on Human- Robot Interaction. Boulder, CO, USA: IEEE Computer Society, 2021, pp. 205–209. [Online]. Available: https:/...
2021
-
[4]
S. Rane, P. J. Bruna, I. Sucholutsky, C. Kello, and T. L. Griffiths, “Concept Alignment,” Jan. 2024. [Online]. Available: http://arxiv.org/abs/2401.08672
arXiv 2024
-
[5]
The benefits, risks and bounds of personalizing the alignment of large language models to individuals,
H. R. Kirk, B. Vidgen, P. R ¨ottger, and S. A. Hale, “The benefits, risks and bounds of personalizing the alignment of large language models to individuals,”Nature Machine Intelligence, vol. 6, no. 4, pp. 383–392, Apr. 2024. [Online]. Available: https://www.nature.com/articles/s42256-024-00820-y
2024
-
[6]
Follow Me: A Study on the Dynamics of Alignment Between Humans and LLM-Based Social Robots,
J. Sherer, R. McPherson, S. Mohanty, G. Sant ´e, G. Gandolfi, M. Romeo, and A. Suglia, “Follow Me: A Study on the Dynamics of Alignment Between Humans and LLM-Based Social Robots,” in Social Robotics, O. Palinko, L. Bodenhagen, J.-J. Cabibihan, K. Fis- cher, S. ˇSabanovi´c, K. Winkle, L. Behera, S. S. Ge, D. Chrysostomou, W. Jiang, and H. He, Eds. Singapo...
2025
-
[7]
Conceptual Alignment: How Brains Achieve Mutual Understanding,
A. Stolk, L. Verhagen, and I. Toni, “Conceptual Alignment: How Brains Achieve Mutual Understanding,”Trends in Cognitive Sciences, vol. 20, no. 3, pp. 180–191, Mar. 2016. [Online]. Available: https://www.cell.com/trends/cognitive-sciences/ abstract/S1364-6613(15)00286-7
2016
-
[8]
Conceptual pacts and lexical choice in conversation,
S. E. Brennan and H. H. Clark, “Conceptual pacts and lexical choice in conversation,”Journal of Experimental Psychology: Learning, Mem- ory, and Cognition, vol. 22, no. 6, pp. 1482–1493, 1996
1996
-
[9]
Saying what you mean in dialogue: A study in conceptual and semantic co-ordination,
S. Garrod and A. Anderson, “Saying what you mean in dialogue: A study in conceptual and semantic co-ordination,”Cognition, vol. 27, no. 2, pp. 181–218, Nov. 1987. [Online]. Available: https://www.sciencedirect.com/science/article/pii/0010027787900187
arXiv 1987
-
[10]
Linguistic alignment between people and computers,
H. P. Branigan, M. J. Pickering, J. Pearson, and J. F. McLean, “Linguistic alignment between people and computers,”Journal of Pragmatics, vol. 42, no. 9, pp. 2355–2368, Sept. 2010
2010
-
[11]
A review of abstract concept learning in embodied agents and robots,
A. Cangelosi and F. Stramandinoli, “A review of abstract concept learning in embodied agents and robots,”Philosophical Transactions of the Royal Society B: Biological Sciences, vol. 373, no. 1752, p. 6, 2018. [Online]. Available: https://www.scopus.com/inward/ record.uri?eid=2-s2.0-85048804487&doi=10.1098%2frstb.2017. 0131&partnerID=40&md5=83b68d4eee2d570...
2018
-
[12]
Learning Perceptual Concepts by Bootstrapping From Human Queries,
A. Bobu, C. Paxton, W. Yang, B. Sundaralingam, Y .-W. Chao, M. Cakmak, and D. Fox, “Learning Perceptual Concepts by Bootstrapping From Human Queries,”IEEE ROBOTICS AND AUTOMATION LETTERS, vol. 7, no. 4, pp. 11 260–11 267, Oct
-
[13]
Available: https://www.scopus.com/inward/record
[Online]. Available: https://www.scopus.com/inward/record. uri?eid=2-s2.0-85135735798&doi=10.1109%2fLRA.2022.3196164& partnerID=40&md5=951e31e893493faa5de51fb6c5a409fc
arXiv 2022
-
[14]
Grounding language in multi- perspective referential communication,
Z. Tang, L. Mao, and A. Suhr, “Grounding language in multi- perspective referential communication,” inProceedings of the 2024 Conference on Empirical Methods in Natural Language Processing, Y . Al-Onaizan, M. Bansal, and Y .-N. Chen, Eds. Miami, Florida, USA: Association for Computational Linguistics, Nov. 2024, pp. 19 727–19 741. [Online]. Available: htt...
2024
-
[15]
M. Kimoto, T. Iio, M. Shiomi, I. Tanev, K. Shimohara, and N. Hagita, “Alignment Approach Comparison between Implicit and Explicit Suggestions in Object Reference Conversations,” in Proceedings of the Fourth International Conference on Human Agent Interaction, ser. HAI ’16. New York, NY , USA: Association for Computing Machinery, Oct. 2016, pp. 193–200. [O...
-
[16]
Evaluating Description and Reference Strategies in a Cooperative Human-Robot Dialogue System,
M. E. Foster, M. Giuliani, A. Isard, C. Matheson, J. Oberlander, and A. Knoll, “Evaluating Description and Reference Strategies in a Cooperative Human-Robot Dialogue System,” inProceedings of the Twenty-first International Joint Conference on Artificial Intelligence. AAAI, 2009
2009
-
[17]
N. Calvo-Barajas, A. Akkuzu, and G. Castellano, “Balancing Human Likeness in Social Robots: Impact on Children’s Lexical Alignment and Self-disclosure for Trust Assessment,”J. Hum.-Robot Interact., vol. 13, no. 4, pp. 1–27, May 2024, just Accepted. [Online]. Available: https://dl.acm.org/doi/10.1145/3659062
-
[18]
Comparative analysis of verbal alignment in human-human and human-agent interactions,
S. Campano, J. Durand, and C. Clavel, “Comparative analysis of verbal alignment in human-human and human-agent interactions,” inProceedings of the Ninth International Conference on Language Resources and Evaluation (LREC’14). Reykjavik, Iceland: European Language Resources Association (ELRA), May 2014, pp. 4415–
2014
-
[19]
Available: https://www.semanticscholar.org/paper/ Comparative-analysis-of-verbal-alignment-in-and-Campano-Durand/ 3abdcc2d0d0be072cf46b0b426061b041c74a658
[Online]. Available: https://www.semanticscholar.org/paper/ Comparative-analysis-of-verbal-alignment-in-and-Campano-Durand/ 3abdcc2d0d0be072cf46b0b426061b041c74a658
-
[20]
Conceptual alignment in reference with artificial and human dialogue partners,
K. van Lierop, M. Goudbeek, and E. Krahmer, “Conceptual alignment in reference with artificial and human dialogue partners,”Proceedings of the Annual Meeting of the Cognitive Science Society, vol. 34, no. 34, pp. 1066–1071, 2012
2012
-
[21]
Conceptual alignment in a joint picture-naming task performed with a social robot,
G. Cirillo, E. Runnqvist, K. Strijkers, N. Nguyen, and C. Baus, “Conceptual alignment in a joint picture-naming task performed with a social robot,”Cognition, vol. 227, p. 105213, Oct. 2022
2022
-
[22]
A Taxonomy to Structure and Analyze Human–Robot Interaction,
L. Onnasch and E. Roesler, “A Taxonomy to Structure and Analyze Human–Robot Interaction,”International Journal of Social Robotics, vol. 13, no. 4, pp. 833–849, July 2021. [Online]. Available: https://link.springer.com/10.1007/s12369-020-00666-5
-
[23]
Mixed-Initiative Human-Robot Interaction: Definition, Taxonomy, and Survey,
S. Jiang and R. C. Arkin, “Mixed-Initiative Human-Robot Interaction: Definition, Taxonomy, and Survey,” in2015 IEEE International Conference on Systems, Man, and Cybernetics. Kowloon Tong, Hong Kong: IEEE, Oct. 2015, pp. 954–961. [Online]. Available: http://ieeexplore.ieee.org/document/7379306/
arXiv 2015
-
[24]
Communicative Robot Signals: Presenting a New Typology for Human-Robot Interaction,
P. Holthaus, T. Schulz, G. Lakatos, and R. Soma, “Communicative Robot Signals: Presenting a New Typology for Human-Robot Interaction,” inProceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction. Stockholm Sweden: ACM, Mar. 2023, pp. 132–141. [Online]. Available: https://dl.acm.org/doi/ 10.1145/3568162.3578631
-
[25]
Design patterns for sociality in human-robot interaction,
P. H. Kahn, N. G. Freier, T. Kanda, H. Ishiguro, J. H. Ruckert, R. L. Severson, and S. K. Kane, “Design patterns for sociality in human-robot interaction,” inProceedings of the 3rd international conference on Human robot interaction - HRI ’08. Amsterdam, The Netherlands: ACM Press, 2008, p. 97. [Online]. Available: http://portal.acm.org/citation.cfm?doid=...
arXiv 2008
-
[26]
Design patterns for exploring and prototyping human-robot interactions,
A. Saupp ´e and B. Mutlu, “Design patterns for exploring and prototyping human-robot interactions,” inProceedings of the 32nd annual ACM conference on Human factors in computing systems - CHI ’14. Toronto, Ontario, Canada: ACM Press, 2014, pp. 1439–1448. [Online]. Available: http://dl.acm.org/citation.cfm?doid= 2556288.2557057
arXiv 2014
-
[27]
Patterns for Representing Knowledge Graphs to Communicate Situational Knowledge of Service Robots,
S. Zhang, Z. Wang, C. Chen, Y . Dai, L. Ye, and X. Sun, “Patterns for Representing Knowledge Graphs to Communicate Situational Knowledge of Service Robots,” inProceedings of the 2021 CHI Conference on Human Factors in Computing Systems, ser. CHI ’21. Yokohama Japan: ACM, May 2021, pp. 1–12. [Online]. Available: https://dl.acm.org/doi/10.1145/3411764.3445767
-
[28]
Toward a mechanistic psychology of dialogue,
M. J. Pickering and S. Garrod, “Toward a mechanistic psychology of dialogue,”Behavioral and Brain Sciences, vol. 27, no. 02, Apr. 2004. [Online]. Available: http://www.journals.cambridge.org/ abstract S0140525X04000056
2004
-
[29]
Linguistic alignment with an artificial agent: A commentary and re-analysis,
S. Gastaldon and G. Calignano, “Linguistic alignment with an artificial agent: A commentary and re-analysis,”Cognition, vol. 259, p. 106099, June 2025. [Online]. Available: https: //linkinghub.elsevier.com/retrieve/pii/S0010027725000393
2025
-
[30]
Position: Towards Bidirectional Human-AI Alignment,
H. Shen, T. Knearem, R. Ghosh, K. Alkiek, K. Krishna, Y . Liu, Z. Ma, S. Petridis, Y .-H. Peng, L. Qiwei, S. Rakshit, C. Si, Y . Xie, J. P. Bigham, F. Bentley, J. Chai, Z. Lipton, Q. Mei, R. Mihalcea, M. Terry, D. Yang, M. R. Morris, P. Resnick, and D. Jurgens, “Position: Towards Bidirectional Human-AI Alignment,” Sept. 2025. [Online]. Available: http://a...
arXiv 2025
-
[31]
H. H. Clark and E. F. Schaefer, “Contributing to Discourse,”Cognitive Science, vol. 13, no. 2, pp. 259–294, 1989. [Online]. Available: https://onlinelibrary.wiley.com/doi/abs/10.1207/s15516709cog1302 7
-
[32]
Aligning Human and Robot Representations,
A. Bobu, A. Peng, P. Agrawal, J. A. Shah, and A. D. Dragan, “Aligning Human and Robot Representations,” inProceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, ser. HRI ’24. New York, NY , USA: Association for Computing Machinery, Mar. 2024, pp. 42–54. [Online]. Available: https://dl.acm.org/doi/10.1145/3610977.3634987
-
[33]
Ontology-Based Knowledge Representation in Robotic Systems: A Survey Oriented toward Applications,
S. Manzoor, Y . G. Rocha, S.-H. Joo, S.-H. Bae, E.-J. Kim, K.-J. Joo, and T.-Y . Kuc, “Ontology-Based Knowledge Representation in Robotic Systems: A Survey Oriented toward Applications,”Applied Sciences, vol. 11, no. 10, p. 4324, May 2021. [Online]. Available: https://www.mdpi.com/2076-3417/11/10/4324
2021
-
[34]
A review and comparison of ontology-based approaches to robot autonomy,
A. Olivares-Alarcos, D. Beßler, A. Khamis, P. Goncalves, M. K. Habib, J. Bermejo-Alonso, M. Barreto, M. Diab, J. Rosell, J. Quintas, J. Olszewska, H. Nakawala, E. Pignaton, A. Gyrard, S. Borgo, G. Aleny `a, M. Beetz, and H. Li, “A review and comparison of ontology-based approaches to robot autonomy,”The Knowledge Engineering Review, vol. 34, p. e29, Jan. ...
-
[35]
Argumentation-based dialogue games for shared control in human-robot systems,
E. I. Sklar and M. Q. Azhar, “Argumentation-based dialogue games for shared control in human-robot systems,”Journal of Human-Robot Interaction, vol. 4, no. 3, pp. 120–148, Dec. 2015
2015
-
[36]
The Grounding Problem in Conversations With and Through Computers,
S. E. Brennan, “The Grounding Problem in Conversations With and Through Computers,” inSocial and Cognitive Psychological Ap- proaches to Interpersonal Communication. Hillsdale, NJ: Psychology Press, 1998, pp. 201–225
1998
-
[37]
A Dialogue Protocol to Support Meaning Negotiation (Extended Abstract),
G. Santos, V . Tamma, T. R. Payne, F. Grasso, G. S. J. Santos, V . Tamma, and T. R. Payne, “A Dialogue Protocol to Support Meaning Negotiation (Extended Abstract),” inProceedings of the 15th International Conference on Autonomous Agents and Multiagent Systems. Singapore: International Foundation for Autonomous Agents and Multiagent Systems, 2016-05-09/2016-05-13
2016
-
[38]
Models of Persuasion Dialogue,
H. Prakken, “Models of Persuasion Dialogue,” inArgumentation in Artificial Intelligence, G. Simari and I. Rahwan, Eds. Boston, MA: Springer US, 2009, pp. 281–300. [Online]. Available: https://doi.org/10.1007/978-0-387-98197-0 14
-
[39]
Negotiation spaces in human-computer collaborative learning,
P. Dillenbourg and M. Baker, “Negotiation spaces in human-computer collaborative learning,” inActes du colloque COOP’96. Juan-les-Pins, France: INRIA, July 1996, pp. 187–206
1996
-
[40]
Conversational Grounding in Multimodal Dialog Systems,
B. Mohapatra, “Conversational Grounding in Multimodal Dialog Systems,” inINTERNATIONAL CONFERENCE ON MULTIMODAL INTERACTION. Paris France: ACM, Oct. 2023, pp. 706–710. [Online]. Available: https://dl.acm.org/doi/10.1145/3577190.3614226
-
[41]
D. N. Walton and E. C. W. Krabbe,Commitment in dialogue: basic concepts of interpersonal reasoning, ser. SUNY series in logic and language. Albany: State University of New York Press, 1995
1995
-
[42]
Locutions for Argumentation in Agent Interaction Protocols,
P. McBurney and S. Parsons, “Locutions for Argumentation in Agent Interaction Protocols,” inAgent Communication, ser. Lecture Notes in Computer Science, R. M. van Eijk, M.-P. Huget, and F. Dignum, Eds. Berlin, Heidelberg: Springer, 2005, pp. 209–225
2005
-
[43]
Argumentation-Based Online Incremental Learning,
H. Ayoobi, M. Cao, R. Verbrugge, and B. Verheij, “Argumentation-Based Online Incremental Learning,”IEEE Transactions on Automation Science and Engineering, vol. 19, no. 4, pp. 3419–3433, Oct. 2022. [Online]. Available: https://ieeexplore.ieee.org/document/9592832/
arXiv 2022
-
[44]
DATE: A Dialogue Act Tagging Scheme for Evaluation of Spoken Dialogue Systems,
M. Walker and R. Passonneau, “DATE: A Dialogue Act Tagging Scheme for Evaluation of Spoken Dialogue Systems,” inProceedings of the First International Conference on Human Language Technology Research, 2001, pp. 1–8
2001
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.