LAMP: Long-Horizon Adaptive Manipulation Planning for Multi-Robot Collaboration in Cluttered Space
Pith reviewed 2026-06-30 07:34 UTC · model grok-4.3
The pith
LAMP combines a learned generative model with systematic and lazy planners to enable long-horizon multi-robot manipulation in cluttered spaces.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
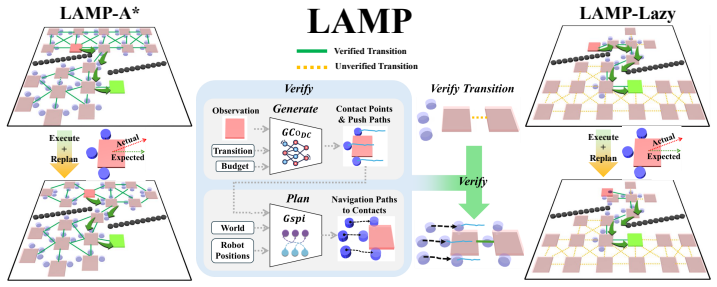
The LAMP framework introduces LAMPA*, a systematic search planner over the full coupled object-robot space, and LAMP-Lazy, a deferred-evaluation planner that supports real-time replanning; both rely on a learned generative manipulation model to generate feasible action proposals, allowing solution of complex long-horizon tasks in highly cluttered environments where prior methods fail.
What carries the argument
The learned generative manipulation model that supplies action proposals, integrated inside the LAMPA* systematic coupled-space search planner and the LAMP-Lazy lazy replanning planner.
If this is right
- Complex long-horizon multi-robot tasks become solvable in highly cluttered environments where prior methods return no solution.
- Planning remains tractable as the number of robots and task length increase, provided the generative model supplies adequate proposals.
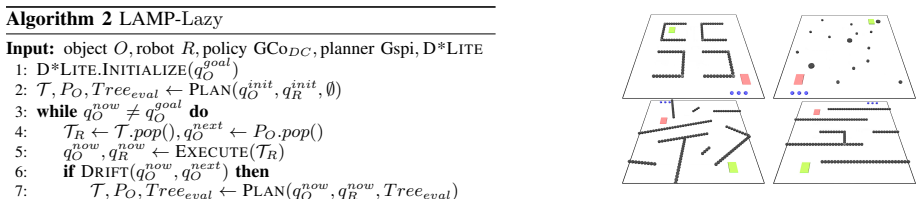
- Real-time replanning becomes feasible through deferred evaluation in LAMP-Lazy.
- The approach maintains the full coupled object-robot search space rather than restricting to surrogate object-only planning.
Where Pith is reading between the lines
- The same proposal-plus-search pattern could be tested on single-robot long-horizon tasks to isolate the benefit of the multi-robot coupling.
- If the generative model is retrained on data from a different robot morphology, the planners might transfer without retraining the search components.
- Adding uncertainty over object poses would require only changes to the proposal generator, leaving the planners unchanged.
Load-bearing premise
The learned generative manipulation model produces action proposals that are sufficiently accurate and complete to let the planners discover feasible solutions without missing critical contact formations or dynamics.
What would settle it
A simulated or physical scene containing a known feasible long-horizon sequence of object and robot contacts that the generative model never proposes, causing both LAMPA* and LAMP-Lazy to return no solution.
Figures

read the original abstract
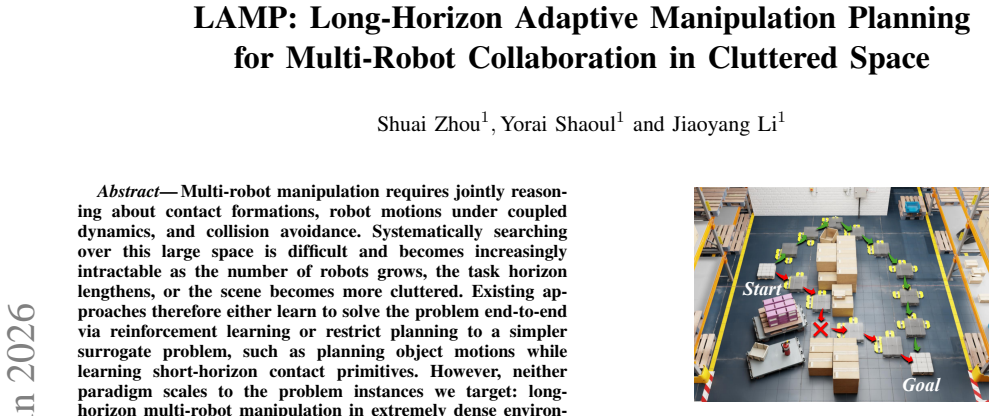
Multi-robot manipulation requires jointly reasoning about contact formations, robot motions under coupled dynamics, and collision avoidance. Systematically searching over this large space is difficult and becomes increasingly intractable as the number of robots grows, the task horizon lengthens, or the scene becomes more cluttered. Existing approaches therefore either learn to solve the problem end-to-end via reinforcement learning or restrict planning to a simpler surrogate problem, such as planning object motions while learning short-horizon contact primitives. However, neither paradigm scales to the problem instances we target: longhorizon multi-robot manipulation in extremely dense environments. In this paper, we propose a Long-horizon Adaptive Manipulation Planning (LAMP) framework with two planners that enable tractable search over the full coupled space by combining a learned generative manipulation model: a LAMPA* planner that systematically searches over the coupled objectrobot space, and LAMP-Lazy: a lazy planner that enables real-time replanning through deferred evaluation. Experiments in challenging simulated environments demonstrate that our approach solves complex long-horizon tasks in highly cluttered environments that prior methods cannot handle.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the LAMP framework for long-horizon multi-robot manipulation planning in cluttered environments. It combines a learned generative manipulation model with two planners—LAMPA* for systematic search over the coupled object-robot space and LAMP-Lazy for deferred-evaluation replanning—to address the intractability of joint reasoning over contacts, dynamics, and collisions. The central claim is that this enables solution of complex tasks in dense clutter where prior end-to-end RL or surrogate-planning methods fail, as shown by experiments in challenging simulated environments.
Significance. If the experimental claims and model coverage hold, the work would offer a meaningful advance by making full coupled-space search tractable for multi-robot problems without reducing to short-horizon primitives or black-box learning. The hybrid learned-plus-search structure is a reasonable direction for scaling beyond current limits.
major comments (2)
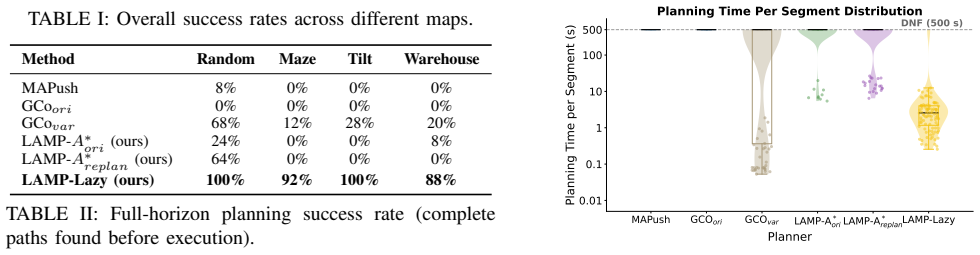
- [Abstract] Abstract (and any experimental section): The claim that 'our approach solves complex long-horizon tasks in highly cluttered environments that prior methods cannot handle' is presented without quantitative results, ablation studies, success rates, or comparison metrics. This leaves the central empirical assertion uninspectable and prevents assessment of whether the generative model supplies action proposals complete enough for the planners to succeed.
- [Abstract] Abstract: The soundness of LAMPA* and LAMP-Lazy rests on the learned generative manipulation model producing action proposals that cover all critical contact formations and dynamics in the target regimes. No evidence (e.g., recall rates for contact modes, coverage statistics, or failure-case analysis) is supplied to show that the model is sufficiently complete; if any feasible formations are omitted, the subsequent search is incomplete by construction.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on strengthening the empirical support in the abstract. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract (and any experimental section): The claim that 'our approach solves complex long-horizon tasks in highly cluttered environments that prior methods cannot handle' is presented without quantitative results, ablation studies, success rates, or comparison metrics. This leaves the central empirical assertion uninspectable and prevents assessment of whether the generative model supplies action proposals complete enough for the planners to succeed.
Authors: The manuscript's experimental section provides quantitative results, ablation studies, success rates, and baseline comparisons supporting the claim. We agree the abstract would benefit from including key metrics to make the assertion self-contained. We will revise the abstract to incorporate summary quantitative highlights from the experiments. revision: yes
-
Referee: [Abstract] Abstract: The soundness of LAMPA* and LAMP-Lazy rests on the learned generative manipulation model producing action proposals that cover all critical contact formations and dynamics in the target regimes. No evidence (e.g., recall rates for contact modes, coverage statistics, or failure-case analysis) is supplied to show that the model is sufficiently complete; if any feasible formations are omitted, the subsequent search is incomplete by construction.
Authors: The experimental results demonstrate successful task solving in dense clutter requiring diverse contacts where prior methods fail, providing empirical support for sufficient coverage. We acknowledge that explicit coverage analysis would strengthen the soundness argument and will add recall rates for contact modes, coverage statistics, and failure-case analysis in the revision. revision: yes
Circularity Check
No circularity detected; claims rest on experimental validation rather than self-referential definitions
full rationale
The provided abstract and context contain no equations, parameter-fitting procedures, self-citations, or uniqueness theorems. The central claims concern empirical performance of LAMPA* and LAMP-Lazy planners that rely on a learned generative model, but the text does not define any quantity in terms of itself or rename fitted outputs as predictions. The derivation chain is therefore self-contained against external benchmarks (simulation experiments), with no load-bearing step reducing to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,
Y . Feng, C. Hong, Y . Niu, S. Liu, Y . Yang, and D. Zhao, “Learning multi-agent loco-manipulation for long-horizon quadrupedal pushing,” inProceedings of the IEEE International Conference on Robotics and Automation, 2025, pp. 14 441–14 448
2025
-
[2]
Collaborative planar pushing of polytopic objects with multiple robots in complex scenes,
Z. Tang, Y . Feng, and M. Guo, “Collaborative planar pushing of polytopic objects with multiple robots in complex scenes,”arXiv preprint, vol. arXiv:2405.07908, 2024
- [3]
-
[4]
A general task and motion planning framework for multiple manipulators,
T. Pan, A. M. Wells, R. Shome, and L. E. Kavraki, “A general task and motion planning framework for multiple manipulators,” inProceedings of the IEEE International Conference on Intelligent Robots and Systems, 2021, pp. 3168–3174
2021
-
[5]
Long-horizon multi-robot rearrangement planning for construction assembly,
V . N. Hartmann, A. Orthey, D. Driess, O. S. Oguz, and M. Toussaint, “Long-horizon multi-robot rearrangement planning for construction assembly,” inIEEE Transactions on Robotics, vol. 39, no. 1, 2022, pp. 239–252
2022
-
[6]
Multi- agent manipulation via locomotion using hierarchical sim2real,
O. Nachum, M. Ahn, H. Ponte, S. Gu, and V . Kumar, “Multi- agent manipulation via locomotion using hierarchical sim2real,”arXiv preprint, vol. arXiv:1908.05224, 2019
-
[7]
Mqe: Unleashing the power of interaction with multi-agent quadruped environment,
Z. Xiong, B. Chen, S. Huang, W.-W. Tu, Z. He, and Y . Gao, “Mqe: Unleashing the power of interaction with multi-agent quadruped environment,” inProceedings of the IEEE International Conference on Intelligent Robots and Systems, 2024, pp. 5918–5924
2024
-
[8]
Integrated task and motion planning,
C. R. Garrett, R. Chitnis, R. Holladay, B. Kim, T. Silver, L. P. Kael- bling, and T. Lozano-P ´erez, “Integrated task and motion planning,” in Annual review of control, robotics, and autonomous systems, vol. 4, no. 1, 2021, pp. 265–293
2021
-
[9]
One-shot manipulation strategy learning by making contact analogies,
Y . Liu, J. Mao, J. B. Tenenbaum, T. Lozano-P ´erez, and L. P. Kael- bling, “One-shot manipulation strategy learning by making contact analogies,” inProceedings of the IEEE International Conference on Robotics and Automation, 2025, pp. 15 387–15 393
2025
-
[10]
Learning reusable manipulation strategies,
J. Mao, T. Lozano-P ´erez, J. B. Tenenbaum, and L. P. Kaelbling, “Learning reusable manipulation strategies,” inProceedings of Ma- chine Learning Research, vol. 229, 2023, pp. 1467–1483
2023
-
[11]
SLAP: Shortcut learning for abstract planning,
Y . I. Liu, B. Li, B. Eysenbach, and T. Silver, “Slap: Shortcut learning for abstract planning,”arXiv preprint, vol. arXiv:2511.01107, 2025
-
[12]
Learning neuro-symbolic skills for bilevel planning,
T. Silver, A. Athalye, J. B. Tenenbaum, T. Lozano-P ´erez, and L. P. Kaelbling, “Learning neuro-symbolic skills for bilevel planning,” in Proceedings of Machine Learning Research, vol. 205, 2023, pp. 701– 714
2023
-
[13]
Learning neuro-symbolic relational transition models for bilevel planning,
R. Chitnis, T. Silver, J. B. Tenenbaum, T. Lozano-P ´erez, and L. P. Kaelbling, “Learning neuro-symbolic relational transition models for bilevel planning,” inProceedings of the IEEE International Conference on Intelligent Robots and Systems, 2022, pp. 4166–4173
2022
-
[14]
Bilevel learning for bilevel planning,
B. Li, T. Silver, S. Scherer, and A. Gray, “Bilevel learning for bilevel planning,” inProceedings of the Robotics: Science and Systems, 2025
2025
-
[15]
Predicate invention for bilevel planning,
T. Silver, R. Chitnis, N. Kumar, W. McClinton, T. Lozano-P ´erez, L. Kaelbling, and J. B. Tenenbaum, “Predicate invention for bilevel planning,” inProceedings of the AAAI Conference on Artificial Intel- ligence, vol. 37, no. 10, 2023, pp. 12 120–12 129
2023
-
[16]
Anytime multi-agent path finding via machine learning-guided large neighborhood search,
T. Huang, J. Li, S. Koenig, and B. Dilkina, “Anytime multi-agent path finding via machine learning-guided large neighborhood search,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 36, no. 9, 2022, pp. 9368–9376
2022
-
[17]
Deploying ten thousand robots: Scalable imitation learning for lifelong multi-agent path finding,
H. Jiang, Y . Wang, R. Veerapaneni, T. H. Duhan, G. A. Sartoretti, and J. Li, “Deploying ten thousand robots: Scalable imitation learning for lifelong multi-agent path finding,” inProceedings of the IEEE International Conference on Robotics and Automation, 2025, pp. 1–7
2025
-
[18]
Path planning using lazy prm,
R. Bohlin and L. E. Kavraki, “Path planning using lazy prm,” in Proceedings of the IEEE International Conference on Robotics and Automation, vol. 1, 2000, pp. 521–528
2000
-
[19]
A unifying formalism for shortest path problems with expensive edge evaluations via lazy best-first search over paths with edge selectors,
C. M. Dellin and S. S. Srinivasa, “A unifying formalism for shortest path problems with expensive edge evaluations via lazy best-first search over paths with edge selectors,” inProceedings of the Inter- national Conference on Automated Planning and Scheduling, vol. 26, 2016, pp. 459–467
2016
-
[20]
Koenig and M
S. Koenig and M. Likhachev, “D*lite,” inProceedings of the National Conference on Artificial Intelligence, 2002, pp. 476–483
2002
-
[21]
Mujoco: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “Mujoco: A physics engine for model-based control,” inProceedings of the IEEE International Conference on Intelligent Robots and Systems, 2012, pp. 5026–5033
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.