Directed Distance Fields for Constant-Time Ray Queries on Gaussian Splatting
Pith reviewed 2026-06-28 17:55 UTC · model grok-4.3
The pith
A 52 MB neural field answers any ray query for a Gaussian splatting scene in one forward pass.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
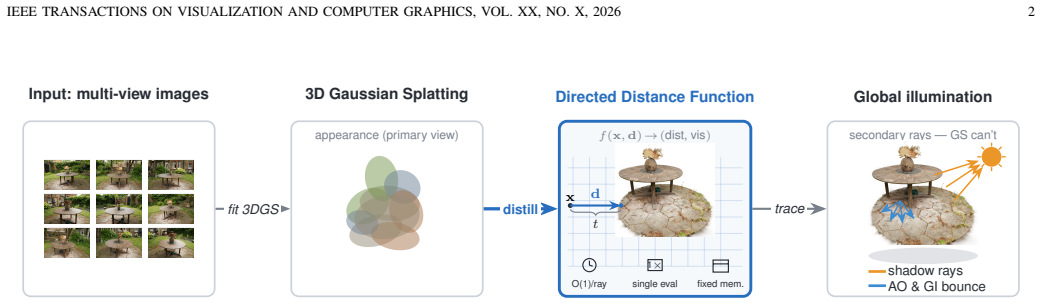
A small neural field called the Directed Distance Function can be trained on clean distance values rendered from 3D Gaussians to serve as a constant-time ray oracle whose memory footprint and query latency do not grow with scene size, thereby supplying the secondary-ray information needed for global illumination directly from an image-trained 3DGS representation without any mesh.
What carries the argument
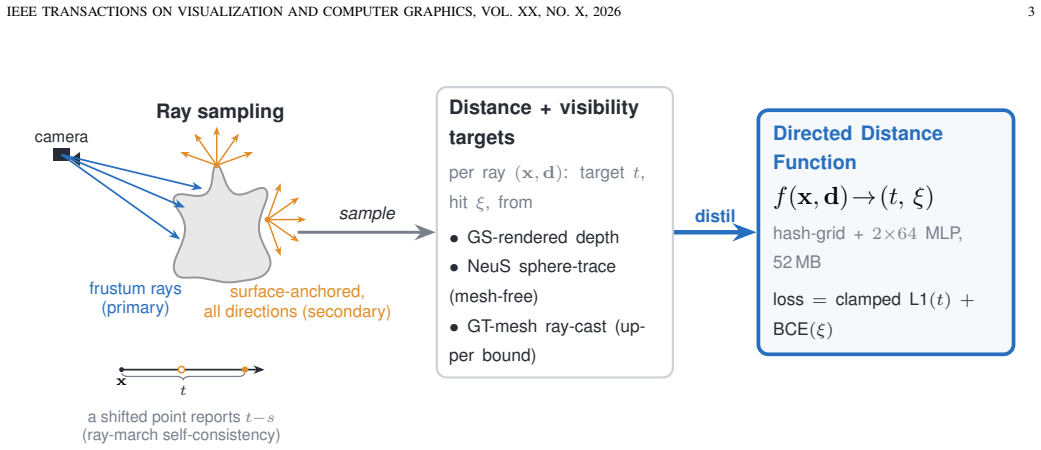
The Directed Distance Function (DDF), a neural field that maps ray origin and direction to distance to the first surface and a binary hit indicator.
If this is right
- Ray queries for global illumination become feasible inside any 3DGS pipeline without extracting a mesh.
- Memory and compute for the ray oracle remain fixed while the underlying splat count increases.
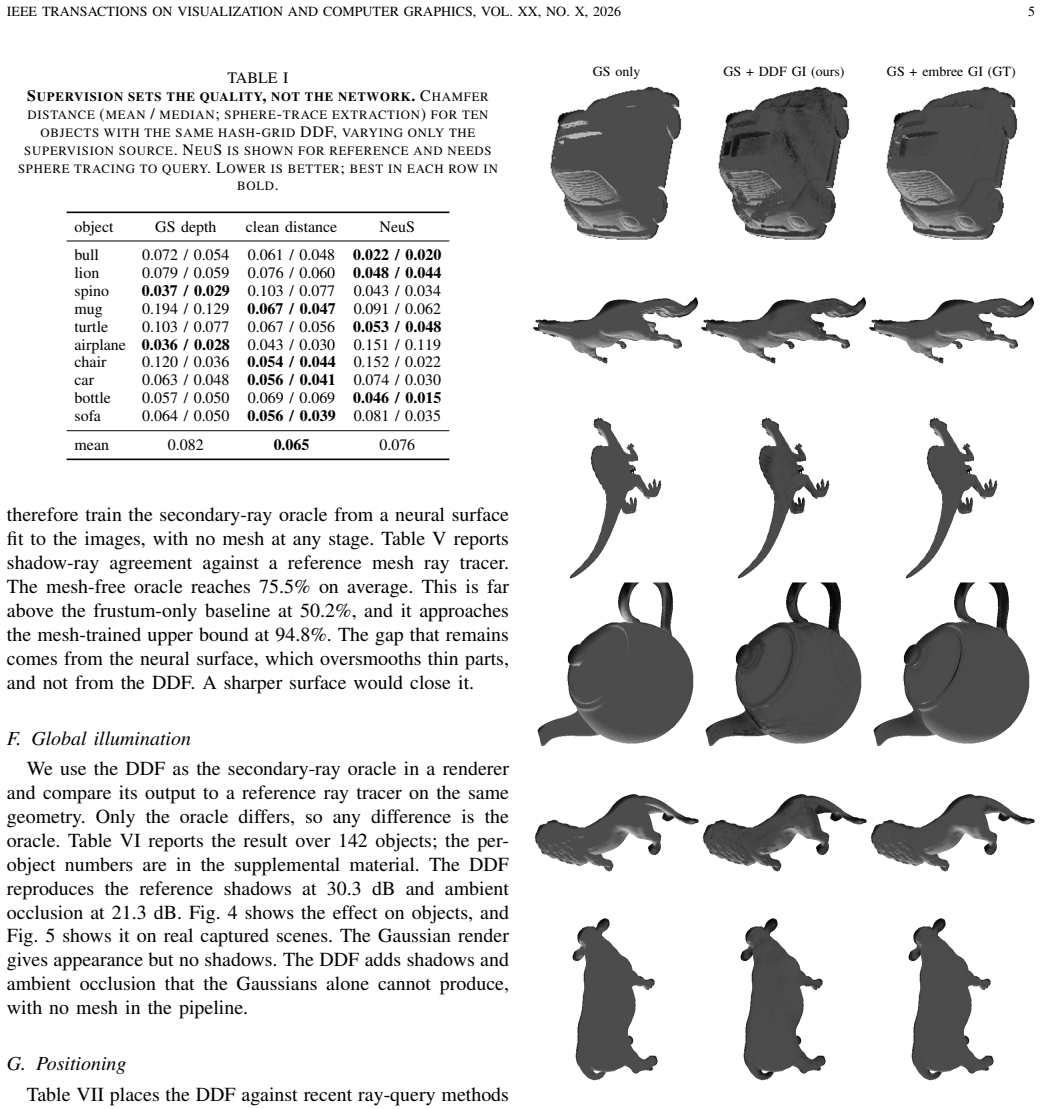
- Shadows and ambient occlusion can be computed at 30.3 dB and 21.3 dB fidelity using only the distilled field.
- The same field works on both synthetic multi-object scenes and real captured environments.
Where Pith is reading between the lines
- The same distillation idea could be tried on other rasterizers that currently lack secondary-ray support.
- Replacing per-Gaussian acceleration structures with one fixed-size neural field would change how large scenes are stored for ray tracing.
- Direct integration of the DDF into the splatting renderer might allow real-time global illumination on consumer hardware.
Load-bearing premise
Clean distance values rendered from the Gaussians supply enough supervision for the neural field to generalize to arbitrary secondary rays.
What would settle it
Measure DDF query time and shadow PSNR on a scene whose Gaussian count is ten times larger than the largest test scene; if either quantity grows with Gaussian count or PSNR falls below 25 dB, the constant-time claim is false.
Figures
read the original abstract
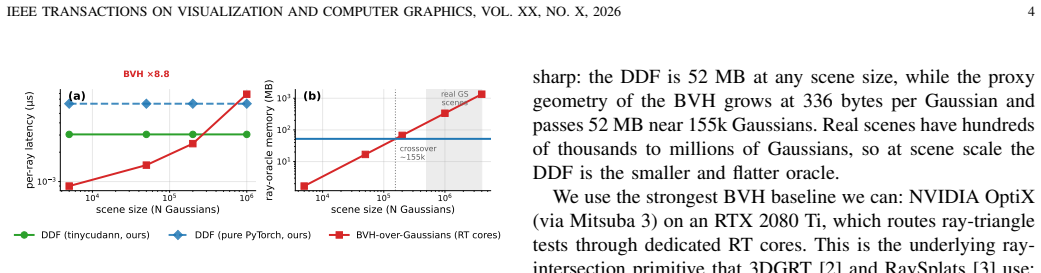
3D Gaussian Splatting (3DGS) renders new views of a scene in real time. Like every rasterizer, it answers only primary rays, the rays from the camera through the image. It cannot trace the secondary rays that shadows, ambient occlusion, and global illumination need. We turn a trained 3DGS scene into a ray oracle by distilling a Directed Distance Function (DDF). The DDF is a small neural field. It takes a ray, given by an origin and a direction, and returns the distance to the first surface and whether the ray hits anything. Each query is one forward pass. The field is 52~MB, and its size does not depend on the number of Gaussians, so its cost and memory stay flat as the scene grows. We make three points. First, we study what supervision a DDF needs. Depth rendered from the Gaussians is too blurry to teach thin parts, while clean distance supervision recovers them. Second, we measure speed. The DDF is 26 to 72 times faster than sphere tracing an equivalent signed distance field, and unlike a bounding volume hierarchy built over the Gaussians, even on dedicated RT-core hardware, its query time and memory do not grow with the scene. Third, we show a pipeline that needs no mesh: images give a 3DGS scene, a neural surface gives clean distances, and the DDF learns from them. We use the DDF as a secondary-ray oracle for global illumination. It reproduces reference ray-traced shadows at 30.3~dB and ambient occlusion at 21.3~dB across 142 objects, and on real captured scenes. Our codes are available at https://github.com/smlab-niser/ddf-gs.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes distilling a Directed Distance Function (DDF), a compact 52 MB neural field, from a trained 3D Gaussian Splatting (3DGS) scene. Given a ray origin and direction, the DDF returns the distance to the first surface hit and a hit flag in a single forward pass. This enables constant-time secondary ray queries for shadows, ambient occlusion, and global illumination. The DDF size is independent of Gaussian count. The authors compare depth vs. clean distance supervision, report 26-72x speedups over sphere tracing, compare favorably to BVH on RT cores, and achieve 30.3 dB PSNR on shadows and 21.3 dB on AO versus ray-traced references across 142 objects using a mesh-free pipeline from images to 3DGS to neural surface to DDF. Code is released.
Significance. If the generalization to arbitrary secondary rays holds, the fixed-memory, constant-time DDF addresses a core limitation of 3DGS (primary-ray only) and enables scalable GI in real-time pipelines without meshes or scene-size-dependent acceleration structures. The explicit comparison of supervision sources and the released code are strengths that aid reproducibility and future work on neural oracles for splatting scenes.
major comments (2)
- [Abstract and §3] Abstract and §3: The central claim that the DDF generalizes from clean distance supervision (rendered from a neural surface) to arbitrary secondary-ray queries for GI rests on unstated details of the training distribution, ray sampling strategy, and network capacity relative to scene complexity. Without these, the reported aggregate PSNR values cannot be assessed for robustness on grazing or multi-bounce rays.
- [§4] §4 (results): The 30.3 dB shadow and 21.3 dB AO PSNR figures are aggregate across 142 objects with no per-scene variance, error histograms, or breakdown by ray category; this weakens the support for the claim that the DDF reproduces reference ray-traced results for general global illumination.
minor comments (2)
- [Abstract] The abstract states the DDF is 52 MB but does not specify the exact network architecture (layer count, hidden dimension) or training hyperparameters; adding these would improve clarity without affecting the claims.
- [§3] Figure captions and text should explicitly state whether the reported timings include only the DDF forward pass or also any preprocessing.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3: The central claim that the DDF generalizes from clean distance supervision (rendered from a neural surface) to arbitrary secondary-ray queries for GI rests on unstated details of the training distribution, ray sampling strategy, and network capacity relative to scene complexity. Without these, the reported aggregate PSNR values cannot be assessed for robustness on grazing or multi-bounce rays.
Authors: We agree that the manuscript would benefit from more explicit details on the training distribution and sampling to support the generalization claim. We will revise Section 3 to include a precise description of the ray sampling strategy, the network architecture and capacity, and how these choices relate to coverage of grazing angles and multi-bounce scenarios. This will allow readers to better evaluate robustness of the reported PSNR values. revision: yes
-
Referee: [§4] §4 (results): The 30.3 dB shadow and 21.3 dB AO PSNR figures are aggregate across 142 objects with no per-scene variance, error histograms, or breakdown by ray category; this weakens the support for the claim that the DDF reproduces reference ray-traced results for general global illumination.
Authors: We acknowledge that aggregate metrics alone provide limited insight into per-scene behavior and ray-type performance. We will add per-scene variance statistics, error histograms, and a breakdown by ray category (including grazing and multi-bounce rays) to the revised Section 4 and supplementary material to provide stronger quantitative support for the generalization to general global illumination. revision: yes
Circularity Check
No circularity: empirical training on external distance supervision with independent ray-tracing validation
full rationale
The paper describes distilling a fixed-size neural DDF from clean distance fields rendered via a neural surface on top of 3DGS, then validates it empirically against separate ray-traced references (30.3 dB shadows, 21.3 dB AO). No equations, predictions, or claims reduce by construction to fitted parameters or self-citations; the size-independence and query-time claims follow directly from the neural-field architecture rather than any internal redefinition. The load-bearing generalization assumption is tested via reported metrics on held-out scenes rather than assumed by definition.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A small neural field can be trained to accurately map arbitrary ray origin-direction pairs to first-hit distance and hit status using distance supervision from the Gaussians.
Reference graph
Works this paper leans on
-
[1]
3d gaussian splatting for real-time radiance field rendering,
B. Kerbl, G. Kopanas, T. Leimkühler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,”ACM Transactions on Graphics, vol. 42, no. 4, pp. 1–14, 2023. TABLE V MESH-FREE SECONDARY-RAY ORACLE.SHADOW-RAY AGREEMENT VS. GT-MESH EMBREE(%).NeuS-omnidir(OURS;IMAGES→NEUS→DDF,NO MESH)APPROACHES THE MESH-TRAINED UPPER BOUND AND FAR EXCEE...
2023
-
[2]
3d gaussian ray tracing: Fast tracing of particle scenes,
N. Moenne-Loccoz, A. Mirzaei, O. Perel, R. de Lutio, J. Martinez Esturo, G. State, S. Fidler, N. Sharp, and Z. Gojcic, “3d gaussian ray tracing: Fast tracing of particle scenes,”ACM Trans. Graph., vol. 43, no. 6, Nov. 2024. [Online]. Available: https://doi.org/10.1145/3687934
-
[3]
InProceedings of the IEEE conference on computer vision and pattern recognition
K. Byrski, M. Mazur, J. Tabor, T. Dziarmaga, M. K ˛ adziołka, D. Baran, and P. Spurek, “Raysplats: Ray tracing based gaussian splatting,”arXiv preprint arXiv:2501.19196, 2025
-
[4]
Representing 3d shapes with probabilistic directed distance fields,
T. Aumentado-Armstrong, S. Tsogkas, S. Dickinson, and A. Jepson, “Representing 3d shapes with probabilistic directed distance fields,” in IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 19 343–19 354
2022
-
[5]
Neural directional distance field object representation for uni-directional path-traced rendering,
A. P. Behera and S. Mishra, “Neural directional distance field object representation for uni-directional path-traced rendering,” in2023 14th International Conference on Computing Communication and Network- ing Technologies (ICCCNT). IEEE, 2023, pp. 1–6
2023
-
[6]
Deepsdf: Learning continuous signed distance functions for shape representation,
J. J. Park, P. Florence, J. Straub, R. Newcombe, and S. Lovegrove, “Deepsdf: Learning continuous signed distance functions for shape representation,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2019, pp. 165–174
2019
-
[7]
Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction,
P. Wang, L. Liu, Y . Liu, C. Theobalt, T. Komura, and W. Wang, “Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction,” inAdvances in Neural Information Processing Systems (NeurIPS), 2021
2021
-
[8]
Instant neural graphics primitives with a multiresolution hash encoding,
T. Müller, A. Evans, C. Schied, and A. Keller, “Instant neural graphics primitives with a multiresolution hash encoding,”ACM Transactions on Graphics, vol. 41, no. 4, pp. 1–15, 2022
2022
-
[9]
Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering,
A. Guédon and V . Lepetit, “Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering,” in IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 5354–5363
2024
-
[10]
In: ACM SIGGRAPH 2024 Conference Pa- pers
B. Huang, Z. Yu, A. Chen, A. Geiger, and S. Gao, “2d gaussian splatting for geometrically accurate radiance fields,” inACM SIGGRAPH 2024 Conference Papers, ser. SIGGRAPH ’24. New York, NY , USA: Association for Computing Machinery, 2024. [Online]. Available: https://doi.org/10.1145/3641519.3657428
-
[11]
Gsdf: 3dgs meets sdf for improved neural rendering and reconstruction,
M. Yu, T. Lu, L. Xu, L. Jiang, Y . Xiangli, and B. Dai, “Gsdf: 3dgs meets sdf for improved neural rendering and reconstruction,”Advances in Neural Information Processing Systems, vol. 37, pp. 129 507–129 530, 2024
2024
-
[12]
Nerv: Neural reflectance and visibility fields for relighting and view synthesis,
P. P. Srinivasan, B. Deng, X. Zhang, M. Tancik, B. Mildenhall, and J. T. Barron, “Nerv: Neural reflectance and visibility fields for relighting and view synthesis,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2021, pp. 7495–7504
2021
-
[13]
Gs-ir: 3d gaussian splatting for inverse rendering,
Z. Liang, Q. Zhang, Y . Feng, Y . Shan, and K. Jia, “Gs-ir: 3d gaussian splatting for inverse rendering,” inProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, 2024, pp. 21 644– 21 653. IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. XX, NO. X, 2026 8 TABLE VII POSITIONINGVS.RECENT RAY-QUERY METHODS FORGSAND...
2024
-
[14]
Gaussianshader: 3d gaussian splatting with shading functions for re- flective surfaces,
Y . Jiang, J. Tu, Y . Liu, X. Gao, X. Long, W. Wang, and Y . Ma, “Gaussianshader: 3d gaussian splatting with shading functions for re- flective surfaces,” inIEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 5322–5332
2024
-
[15]
Relightable 3d gaussians: Realistic point cloud relighting with brdf decomposition and ray tracing,
J. Gao, C. Gu, Y . Lin, H. Zhu, X. Cao, L. Zhang, and Y . Yao, “Relightable 3d gaussians: Realistic point cloud relighting with brdf decomposition and ray tracing,” inEuropean Conf. on Computer Vision (ECCV), 2024, pp. 73–89
2024
-
[16]
Google scanned objects: A high- quality dataset of 3d scanned household items,
L. Downs, A. Francis, N. Koenig, B. Kinman, R. Hickman, K. Reymann, T. B. McHugh, and V . Vanhoucke, “Google scanned objects: A high- quality dataset of 3d scanned household items,” inIEEE Int. Conf. on Robotics and Automation (ICRA), 2022, pp. 2553–2560
2022
-
[17]
Mip-nerf 360: Unbounded anti-aliased neural radiance fields,
J. T. Barron, B. Mildenhall, D. Verbin, P. P. Srinivasan, and P. Hed- man, “Mip-nerf 360: Unbounded anti-aliased neural radiance fields,” in IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2022, pp. 5470–5479
2022
-
[18]
Tanks and temples: Benchmarking large-scale scene reconstruction,
A. Knapitsch, J. Park, Q.-Y . Zhou, and V . Koltun, “Tanks and temples: Benchmarking large-scale scene reconstruction,”ACM Transactions on Graphics, vol. 36, no. 4, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.