Aerial Animal Biometrics: Individual Friesian Cattle Recovery and Visual Identification via an Autonomous UAV with Onboard Deep Inference
Pith reviewed 2026-05-24 23:09 UTC · model grok-4.3
The pith
An autonomous UAV uses three onboard neural networks to detect, approach, and identify individual Friesian cattle by coat pattern with zero errors during real flights.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A computationally-enhanced M100 UAV equipped with YOLOv2 species detection, a dual-stream exploratory agency network, and an InceptionV3 LRCN biometric identifier can autonomously locate and visually identify individual Holstein Friesian cattle by coat pattern during low-altitude flights over dispersed herds, delivering error-free results across 146.7 minutes of real-world operation without any post-flight correction.
What carries the argument
The integrated onboard inference pipeline that runs YOLOv2 for species detection, a dual-stream CNN for exploratory agency, and InceptionV3 LRCN for biometric coat-pattern matching in one autonomous flight loop.
If this is right
- Supports tag-less monitoring of livestock and wildlife from the air in open pasture.
- Removes requirement for post-flight data correction or human oversight after launch.
- Demonstrates that species detection, navigation control, and biometric recognition can run simultaneously on a single UAV processor.
- Provides a working template for scaling autonomous biometric surveys to larger or more mobile groups.
Where Pith is reading between the lines
- The same pipeline could be tested on other coat-patterned species such as zebras or giraffes with only retraining of the final identifier.
- Real-time ID data could feed directly into farm management software for immediate alerts on missing or ill animals.
- Reducing reliance on physical tags may lower both cost and animal stress in long-term ecological studies.
Load-bearing premise
The three neural networks continue to produce error-free outputs when executed live on the UAV amid moving animals, changing light, and spread-out herd positions without any later human fixes.
What would settle it
One incorrect individual identification recorded during a comparable autonomous low-altitude flight over a similar herd with the same three networks running onboard would disprove the error-free claim.
Figures

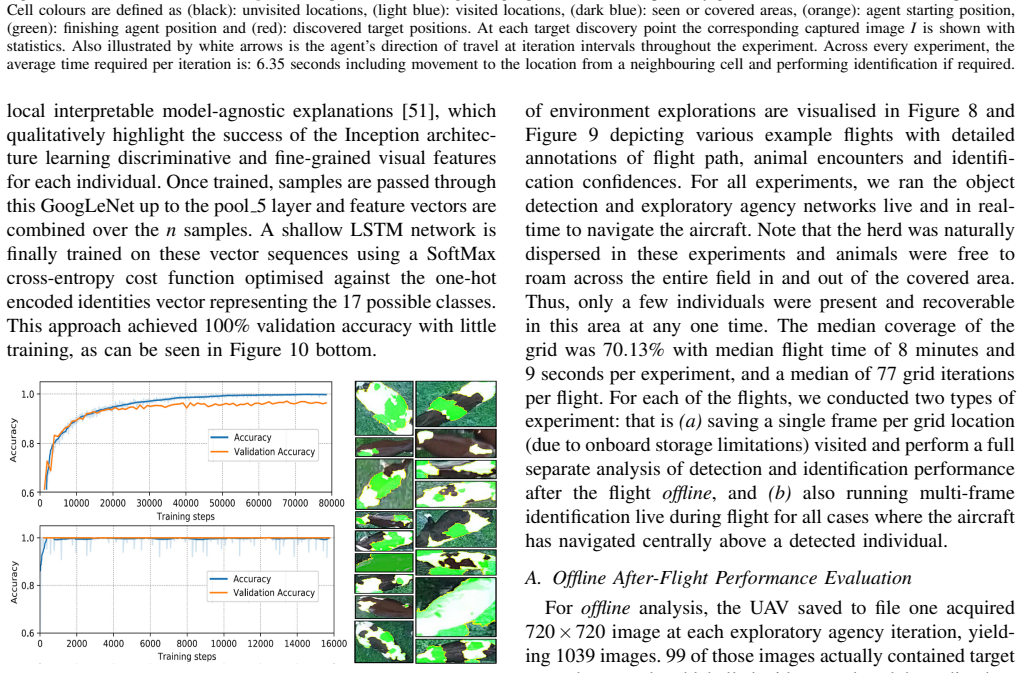
read the original abstract
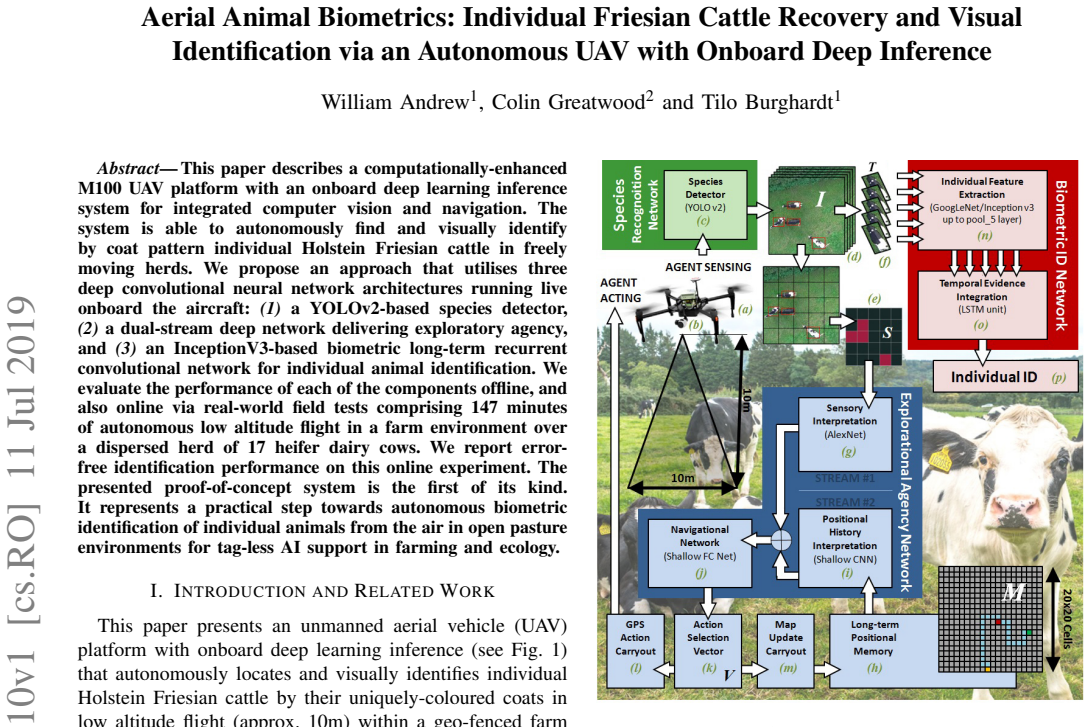
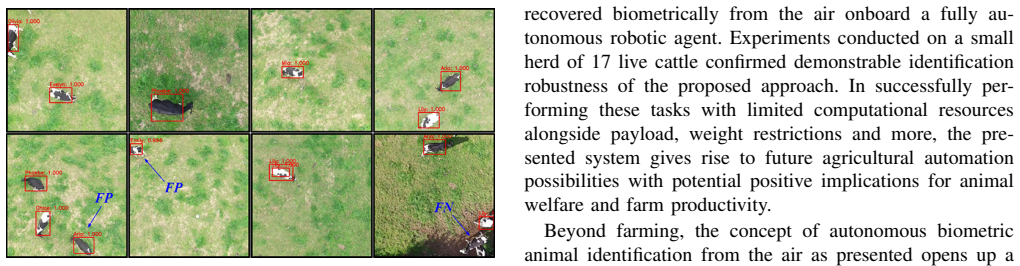
This paper describes a computationally-enhanced M100 UAV platform with an onboard deep learning inference system for integrated computer vision and navigation able to autonomously find and visually identify by coat pattern individual Holstein Friesian cattle in freely moving herds. We propose an approach that utilises three deep convolutional neural network architectures running live onboard the aircraft; that is, a YoloV2-based species detector, a dual-stream CNN delivering exploratory agency and an InceptionV3-based biometric LRCN for individual animal identification. We evaluate the performance of each of the components offline, and also online via real-world field tests comprising 146.7 minutes of autonomous low altitude flight in a farm environment over a dispersed herd of 17 heifer dairy cows. We report error-free identification performance on this online experiment. The presented proof-of-concept system is the first of its kind and a successful step towards autonomous biometric identification of individual animals from the air in open pasture environments for tag-less AI support in farming and ecology.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a computationally-enhanced M100 UAV with three onboard CNNs (YOLOv2 species detector, dual-stream exploratory agency network, and InceptionV3 LRCN biometric identifier) for autonomous detection, navigation, and visual identification of individual Holstein Friesian cattle by coat pattern in open pasture. It reports offline component evaluations plus an online field demonstration of 146.7 minutes of fully autonomous low-altitude flight over a herd of 17 heifers, claiming error-free identification performance with no post-flight correction.
Significance. If the error-free online claim is substantiated with quantitative metrics and verification details, the work would constitute a meaningful proof-of-concept for integrated real-time aerial biometrics in dynamic, tag-less farm and ecology settings, advancing autonomous UAV systems beyond offline analysis.
major comments (2)
- [Abstract] Abstract: the central claim of 'error-free identification performance on this online experiment' is stated without any quantitative breakdown (number of identification attempts, per-animal or per-component success counts, or real-time ground-truth protocol), leaving the result unverifiable from the reported 146.7 min flights over 17 animals.
- [Online field tests] Online field tests section: the manuscript asserts that the YOLOv2, dual-stream agency, and InceptionV3 LRCN components maintained error-free behavior under moving animals, variable lighting, and dispersed herd geometry, yet supplies no failure-mode analysis, baseline comparisons, or description of how live onboard inference errors were assessed without human oversight or post-processing.
minor comments (1)
- [Abstract] The abstract and methods should explicitly state the total number of identification events and the exact procedure for obtaining ground-truth labels during autonomous flight.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the verifiability of our online results. We address each major comment below and indicate planned revisions where feasible.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'error-free identification performance on this online experiment' is stated without any quantitative breakdown (number of identification attempts, per-animal or per-component success counts, or real-time ground-truth protocol), leaving the result unverifiable from the reported 146.7 min flights over 17 animals.
Authors: We agree the abstract would be strengthened by explicit quantitative indicators. The reported result reflects successful completion of 146.7 minutes of fully autonomous flight over 17 animals with no observed system failures or interventions. We will revise the abstract to state the animal count and flight duration more prominently and to clarify that the error-free claim rests on uninterrupted autonomous operation without post-flight correction. Detailed per-attempt counts were not logged in real time to preserve onboard compute for inference. revision: partial
-
Referee: [Online field tests] Online field tests section: the manuscript asserts that the YOLOv2, dual-stream agency, and InceptionV3 LRCN components maintained error-free behavior under moving animals, variable lighting, and dispersed herd geometry, yet supplies no failure-mode analysis, baseline comparisons, or description of how live onboard inference errors were assessed without human oversight or post-processing.
Authors: The section presents the integrated demonstration. We will revise it to describe the real-time monitoring protocol (continuous telemetry of component outputs and flight status) that confirmed no interventions were required. Offline component evaluations already contain baseline comparisons; we will add a cross-reference. No explicit failure-mode analysis was included because the demonstration exhibited no component failures under the reported conditions. revision: yes
- Exact counts of individual identification attempts and per-animal or per-component success rates during the live 146.7-minute flights, as these granular logs were not recorded onboard to minimize computational load.
Circularity Check
No circularity: empirical field demonstration only
full rationale
The paper reports an engineering system (YOLOv2 detector + dual-stream agency network + InceptionV3 LRCN) evaluated via offline tests and 146.7 min of real-world autonomous UAV flights, claiming error-free online identification. No equations, first-principles derivations, fitted parameters renamed as predictions, or load-bearing self-citations appear in the provided text. The central result is a direct empirical outcome from the field experiment, not a reduction to its own inputs by construction. This matches the default expectation of a non-circular empirical report.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Cattle coat patterns are sufficiently unique and stable across individuals to enable reliable visual biometric identification from aerial imagery.
- domain assumption Standard pre-trained CNN architectures (YOLOv2, dual-stream navigation net, InceptionV3 LRCN) can be adapted and run in real time onboard UAV hardware without loss of the reported accuracy.
Reference graph
Works this paper leans on
-
[1]
Time budget differences of high-and low-social rank grazing dairy cows,
R. Ungerfeld, C. Cajarville, M. Rosas, and J. Repetto, “Time budget differences of high-and low-social rank grazing dairy cows,” New Zealand journal of agricultural research , vol. 57, no. 2, pp. 122–127, 2014
work page 2014
-
[2]
Stabilization of social hierarchy in dairy cows,
S. Kondo and J. Hurnik, “Stabilization of social hierarchy in dairy cows,” Applied Animal Behaviour Science , vol. 27, no. 4, pp. 287– 297, 1990
work page 1990
-
[3]
C. Phillips and M. Rind, “The effects of social dominance on the production and behavior of grazing dairy cows offered forage supple- ments,” Journal of Dairy Science , vol. 85, no. 1, pp. 51–59, 2002
work page 2002
-
[4]
Diurnal grazing pattern: its physiological basis and strategic management,
P. Gregorini, “Diurnal grazing pattern: its physiological basis and strategic management,” Animal Production Science , vol. 52, no. 7, pp. 416–430, 2012
work page 2012
-
[5]
Behavior and daily grazing patterns of cattle,
P. Gregorini, S. Tamminga, and S. Gunter, “Behavior and daily grazing patterns of cattle,” The Professional Animal Scientist , vol. 22, no. 3, pp. 201–209, 2006
work page 2006
-
[6]
Social behavior of grazing beef cattle: Implications for management,
B. Sowell, J. Mosley, and J. Bowman, “Social behavior of grazing beef cattle: Implications for management,” Journal of Animal Science, vol. 77, no. E-Suppl, pp. 1–6, 2000
work page 2000
-
[7]
Uav intelligent path planning for wilderness search and rescue,
L. Lin and M. A. Goodrich, “Uav intelligent path planning for wilderness search and rescue,” in Intelligent robots and systems, 2009. IROS 2009. IEEE/RSJ International Conference on . IEEE, 2009, pp. 709–714
work page 2009
-
[8]
Supporting search and rescue operations with uavs,
S. Waharte and N. Trigoni, “Supporting search and rescue operations with uavs,” in Emerging Security Technologies (EST), 2010 Interna- tional Conference on . IEEE, 2010, pp. 142–147
work page 2010
-
[9]
Autonomous robotic strategies for urban search and rescue,
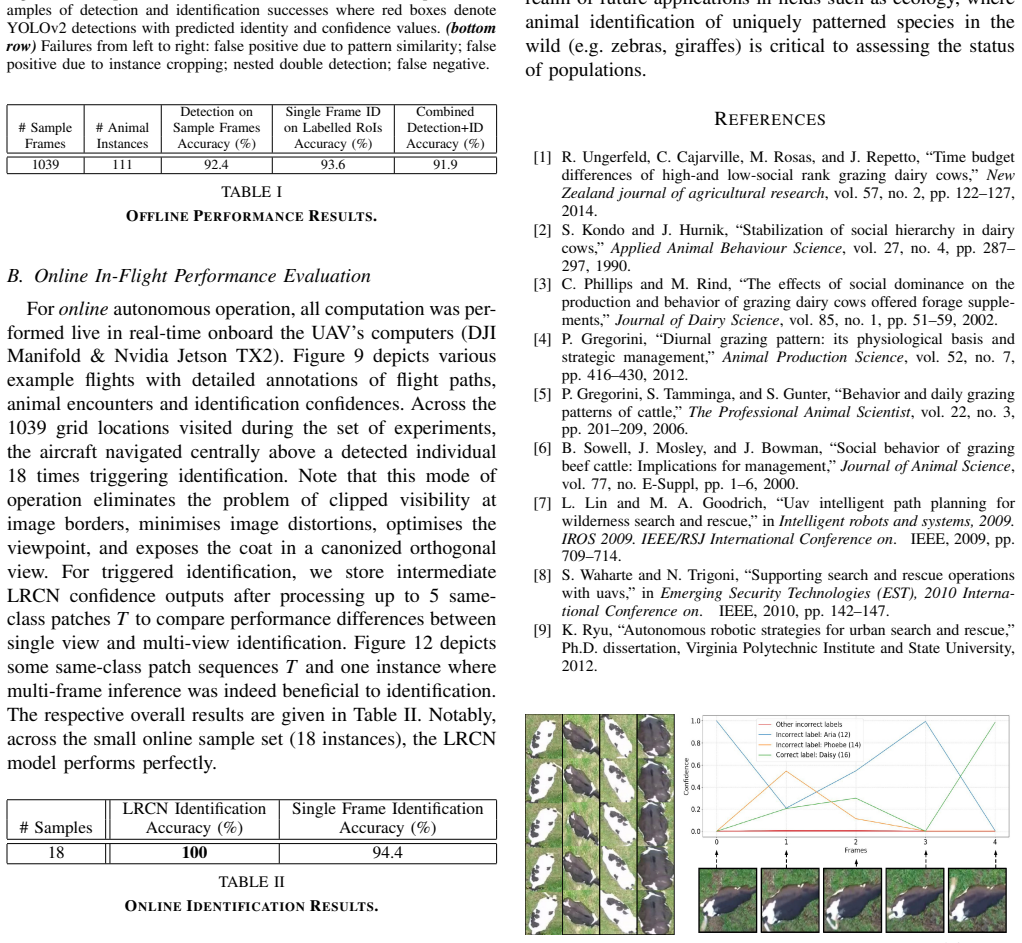
K. Ryu, “Autonomous robotic strategies for urban search and rescue,” Ph.D. dissertation, Virginia Polytechnic Institute and State University, 2012. Fig. 12. Effectiveness of Temporal Integration of Evidence. (left) Exam- ples of 224× 224 pixel same-class RoI sequences T (tracklets) at temporal length 5 as provided to the LRCN component. (right) An example...
work page 2012
-
[10]
Visual navigation for mobile robots: A survey,
F. Bonin-Font, A. Ortiz, and G. Oliver, “Visual navigation for mobile robots: A survey,” Journal of intelligent and robotic systems , vol. 53, no. 3, p. 263, 2008
work page 2008
-
[11]
Vision for mobile robot navigation: A survey,
G. N. DeSouza and A. C. Kak, “Vision for mobile robot navigation: A survey,” IEEE transactions on pattern analysis and machine intel- ligence, vol. 24, no. 2, pp. 237–267, 2002
work page 2002
-
[12]
Visual navigation using view- sequenced route representation,
Y . Matsumoto, M. Inaba, and H. Inoue, “Visual navigation using view- sequenced route representation,” in Robotics and Automation, 1996. Proceedings., 1996 IEEE International Conference on , vol. 1. IEEE, 1996, pp. 83–88
work page 1996
-
[13]
Appearance based process for visual navigation,
S. D. Jones, C. Andresen, and J. L. Crowley, “Appearance based process for visual navigation,” in Intelligent Robots and Systems, 1997. IROS’97., Proceedings of the 1997 IEEE/RSJ International Conference on, vol. 2. IEEE, 1997, pp. 551–557
work page 1997
-
[14]
Divergent stereo for robot navigation: Learning from bees,
J. Santos-Victor, G. Sandini, F. Curotto, and S. Garibaldi, “Divergent stereo for robot navigation: Learning from bees,” in Computer Vision and Pattern Recognition, 1993. Proceedings CVPR’93., 1993 IEEE Computer Society Conference on . IEEE, 1993, pp. 434–439
work page 1993
-
[15]
Ground plane segmentation for mobile robot visual navigation,
N. Pears and B. Liang, “Ground plane segmentation for mobile robot visual navigation,” in Intelligent Robots and Systems, 2001. Proceedings. 2001 IEEE/RSJ International Conference on , vol. 3. IEEE, 2001, pp. 1513–1518
work page 2001
-
[16]
Vision-based 3-d trajectory tracking for unknown environments,
P. Saeedi, P. D. Lawrence, and D. G. Lowe, “Vision-based 3-d trajectory tracking for unknown environments,” IEEE transactions on robotics, vol. 22, no. 1, pp. 119–136, 2006
work page 2006
-
[17]
A machine learning approach to visual perception of forest trails for mobile robots,
A. Giusti, J. Guzzi, D. C. Cires ¸an, F.-L. He, J. P. Rodr´ıguez, F. Fontana, M. Faessler, C. Forster, J. Schmidhuber, G. Di Caro, et al., “A machine learning approach to visual perception of forest trails for mobile robots,” IEEE Robotics and Automation Letters , vol. 1, no. 2, pp. 661–667, 2016
work page 2016
-
[18]
Convolutional neural network-based robot navigation using uncalibrated spherical images,
L. Ran, Y . Zhang, Q. Zhang, and T. Yang, “Convolutional neural network-based robot navigation using uncalibrated spherical images,” Sensors, vol. 17, no. 6, p. 1341, 2017
work page 2017
-
[19]
Deep learning for exploration and recovery of uncharted and dynamic targets from uav- like vision,
W. Andrew, C. Greatwood, and T. Burghardt, “Deep learning for exploration and recovery of uncharted and dynamic targets from uav- like vision,” in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) . IEEE, 2018, pp. 1124–1131
work page 2018
-
[20]
Real-time obstacle avoidance for fast mobile robots in cluttered environments,
J. Borenstein and Y . Koren, “Real-time obstacle avoidance for fast mobile robots in cluttered environments,” in Robotics and Automation,
-
[21]
Proceedings., 1990 IEEE International Conference on . IEEE, 1990, pp. 572–577
work page 1990
-
[22]
On-line map building and nav- igation for autonomous mobile robots,
G. Oriolo, M. Vendittelli, and G. Ulivi, “On-line map building and nav- igation for autonomous mobile robots,” in Robotics and Automation,
-
[23]
Proceedings., 1995 IEEE International Conference on , vol. 3. IEEE, 1995, pp. 2900–2906
work page 1995
-
[24]
The stanford cart and the cmu rover,
H. P. Moravec, “The stanford cart and the cmu rover,” Proceedings of the IEEE, vol. 71, no. 7, pp. 872–884, 1983
work page 1983
-
[25]
A. Kosaka and A. C. Kak, “Fast vision-guided mobile robot navigation using model-based reasoning and prediction of uncertainties,” CVGIP: Image understanding, vol. 56, no. 3, pp. 271–329, 1992
work page 1992
-
[26]
Neural slam: Learning to explore with external memory
J. Zhang, L. Tai, J. Boedecker, W. Burgard, and M. Liu, “Neural slam,” arXiv preprint arXiv:1706.09520 , 2017
-
[27]
Projective simulation applied to the grid-world and the mountain-car problem
A. A. Melnikov, A. Makmal, and H. J. Briegel, “Projective simulation applied to the grid-world and the mountain-car problem,” arXiv preprint arXiv:1405.5459, 2014
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[28]
Animal biometrics: quantifying and detecting phenotypic appearance,
H. S. K ¨uhl and T. Burghardt, “Animal biometrics: quantifying and detecting phenotypic appearance,” Trends in ecology & evolution , vol. 28, no. 7, pp. 432–441, 2013
work page 2013
-
[29]
Object recognition from local scale-invariant features,
D. G. Lowe, “Object recognition from local scale-invariant features,” in Computer vision, 1999. The proceedings of the seventh IEEE international conference on , vol. 2. Ieee, 1999, pp. 1150–1157
work page 1999
-
[30]
Video tracking of dairy cows for assessing mobility scores,
C. A. Martinez-Ortiz, R. M. Everson, and T. Mottram, “Video tracking of dairy cows for assessing mobility scores,” 2013
work page 2013
-
[31]
Asift: A new framework for fully affine invariant image comparison,
J.-M. Morel and G. Yu, “Asift: A new framework for fully affine invariant image comparison,” SIAM Journal on Imaging Sciences , vol. 2, no. 2, pp. 438–469, 2009
work page 2009
-
[32]
W. Andrew, S. Hannuna, N. Campbell, and T. Burghardt, “Automatic individual holstein friesian cattle identification via selective local coat pattern matching in rgb-d imagery,” in Image Processing (ICIP), 2016 IEEE International Conference on . IEEE, 2016, pp. 484–488
work page 2016
-
[33]
Visual localisation and individual identification of holstein friesian cattle via deep learning,
W. Andrew, C. Greatwood, and T. Burghardt, “Visual localisation and individual identification of holstein friesian cattle via deep learning,” in 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Oct 2017, pp. 2850–2859
work page 2017
-
[34]
Long-term recurrent convolutional networks for visual recognition and description,
J. Donahue, L. Anne Hendricks, S. Guadarrama, M. Rohrbach, S. Venugopalan, K. Saenko, and T. Darrell, “Long-term recurrent convolutional networks for visual recognition and description,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2015, pp. 2625–2634
work page 2015
-
[35]
Unmanned aerial vehicles (uavs) for surveying marine fauna: a dugong case study,
A. Hodgson, N. Kelly, and D. Peel, “Unmanned aerial vehicles (uavs) for surveying marine fauna: a dugong case study,” PloS one , vol. 8, no. 11, p. e79556, 2013
work page 2013
-
[36]
Evaluation of an unmanned airborne system for monitoring marine mammals,
W. R. Koski, T. Allen, D. Ireland, G. Buck, P. R. Smith, A. M. Macran- der, M. A. Halick, C. Rushing, D. J. Sliwa, and T. L. McDonald, “Evaluation of an unmanned airborne system for monitoring marine mammals,” Aquatic Mammals, vol. 35, no. 3, p. 347, 2009
work page 2009
-
[37]
A. Abd-Elrahman, L. Pearlstine, and F. Percival, “Development of pat- tern recognition algorithm for automatic bird detection from unmanned aerial vehicle imagery,” Surveying and Land Information Science , vol. 65, no. 1, p. 37, 2005
work page 2005
-
[38]
A. Rodr ´ıguez, J. J. Negro, M. Mulero, C. Rodr ´ıguez, J. Hern ´andez- Pliego, and J. Bustamante, “The eye in the sky: combined use of unmanned aerial systems and gps data loggers for ecological research and conservation of small birds,” PLoS One, vol. 7, no. 12, p. e50336, 2012
work page 2012
-
[39]
MIT, “Sloopflyer,” https://caos.mit.edu/blog/glider-photography- sloopflyer, [Online; accessed 1-Mar-2019. Unpublished elsewhere]
work page 2019
-
[40]
X. Hui, J. Bian, X. Zhao, and M. Tan, “Vision-based autonomous navigation approach for unmanned aerial vehicle transmission-line in- spection,” International Journal of Advanced Robotic Systems, vol. 15, no. 1, p. 1729881417752821, 2018
work page 2018
-
[41]
Approach for autonomous landing on moving platforms based on computer vision,
A. F. Cobo and F. C. Benıtez, “Approach for autonomous landing on moving platforms based on computer vision,” 2016
work page 2016
-
[42]
An Intelligent Unmanned Aircraft System for Wilderness Search and Rescue,
H. Yu, S. Lin, J. Wang, K. Fu, and W. Yang, “An Intelligent Unmanned Aircraft System for Wilderness Search and Rescue,” http://www.imavs.org/papers/2017/143 imav2017 proceedings.pdf, [Online; accessed 1-Mar-2019]
work page 2017
-
[43]
Towards autonomous mod- ular uav missions: The detection, geo-location and landing paradigm,
S. Kyristsis, A. Antonopoulos, T. Chanialakis, E. Stefanakis, C. Linar- dos, A. Tripolitsiotis, and P. Partsinevelos, “Towards autonomous mod- ular uav missions: The detection, geo-location and landing paradigm,” Sensors, vol. 16, no. 11, p. 1844, 2016
work page 2016
-
[44]
Rethink- ing the inception architecture for computer vision,
C. Szegedy, V . Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna, “Rethink- ing the inception architecture for computer vision,” in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , 2016, pp. 2818–2826
work page 2016
-
[45]
YOLO9000: Better, Faster, Stronger
J. Redmon and A. Farhadi, “YOLO9000: better, faster, stronger,” CoRR, vol. abs/1612.08242, 2016. [Online]. Available: http://arxiv. org/abs/1612.08242
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[46]
Imagenet classification with deep convolutional neural networks,
A. Krizhevsky, I. Sutskever, and G. E. Hinton, “Imagenet classification with deep convolutional neural networks,” in Advances in neural information processing systems , 2012, pp. 1097–1105
work page 2012
-
[47]
On the momentum term in gradient descent learning algorithms,
N. Qian, “On the momentum term in gradient descent learning algorithms,” Neural networks, vol. 12, no. 1, pp. 145–151, 1999
work page 1999
-
[48]
Mersenne twister: a 623- dimensionally equidistributed uniform pseudo-random number gen- erator,
M. Matsumoto and T. Nishimura, “Mersenne twister: a 623- dimensionally equidistributed uniform pseudo-random number gen- erator,” ACM Transactions on Modeling and Computer Simulation (TOMACS), vol. 8, no. 1, pp. 3–30, 1998
work page 1998
-
[49]
The global positioning system & inertial navigation,
M. Barth and J. A. Farrell, “The global positioning system & inertial navigation,” McGraw-Hill, vol. 8, pp. 21–56, 1999
work page 1999
-
[50]
B. Hofmann, H. Lichtenegger, and J. Collins, “Gps theory and practice,” Springer Wien NewYork, 2001
work page 2001
-
[51]
Going deeper with convolutions,
C. Szegedy, W. Liu, Y . Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V . Vanhoucke, and A. Rabinovich, “Going deeper with convolutions,” in Proceedings of the IEEE conference on computer vision and pattern recognition , 2015, pp. 1–9
work page 2015
-
[52]
S. Hochreiter and J. Schmidhuber, “Long short-term memory,” Neural computation, vol. 9, no. 8, pp. 1735–1780, 1997
work page 1997
-
[53]
Why should i trust you?: Explaining the predictions of any classifier,
M. T. Ribeiro, S. Singh, and C. Guestrin, “Why should i trust you?: Explaining the predictions of any classifier,” in Proceedings of the 22nd ACM SIGKDD international conference on knowledge discovery and data mining . ACM, 2016, pp. 1135–1144
work page 2016
-
[54]
Smoothing and differentiation of data by simplified least squares procedures
A. Savitzky and M. J. Golay, “Smoothing and differentiation of data by simplified least squares procedures.” Analytical chemistry, vol. 36, no. 8, pp. 1627–1639, 1964
work page 1964
-
[55]
The pascal visual object classes (voc) challenge,
M. Everingham, L. Van Gool, C. K. Williams, J. Winn, and A. Zisser- man, “The pascal visual object classes (voc) challenge,” International journal of computer vision , vol. 88, no. 2, pp. 303–338, 2010
work page 2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.