Evaluation Protocols and Validation for Cameras in Indoor Healthcare Monitoring
Pith reviewed 2026-06-25 21:41 UTC · model grok-4.3
The pith
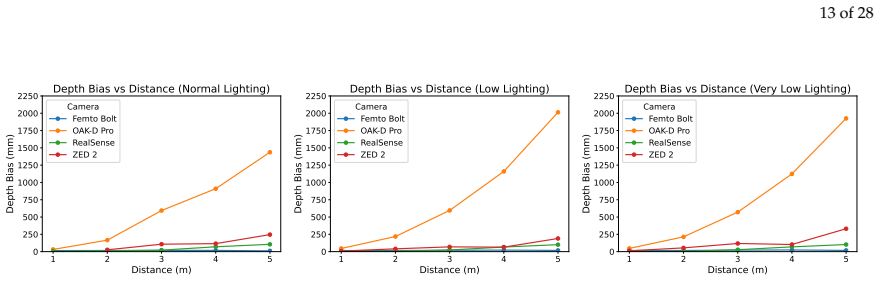
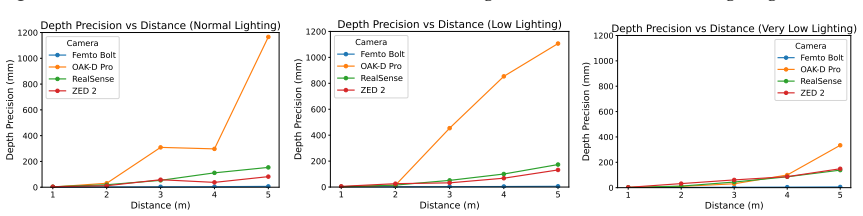
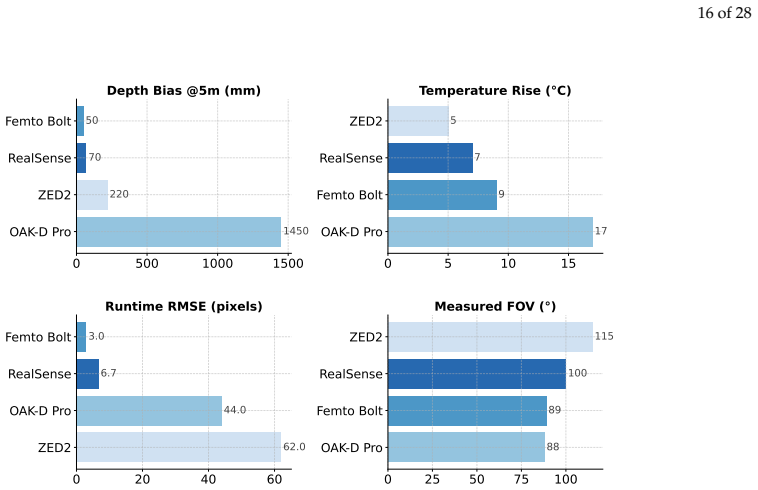
Metrological performance varies substantially across RGB-D cameras, with depth bias at 5 m ranging from 50 mm to over 1400 mm and directly driving 3D pose reconstruction errors from 104 mm to 365 mm.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
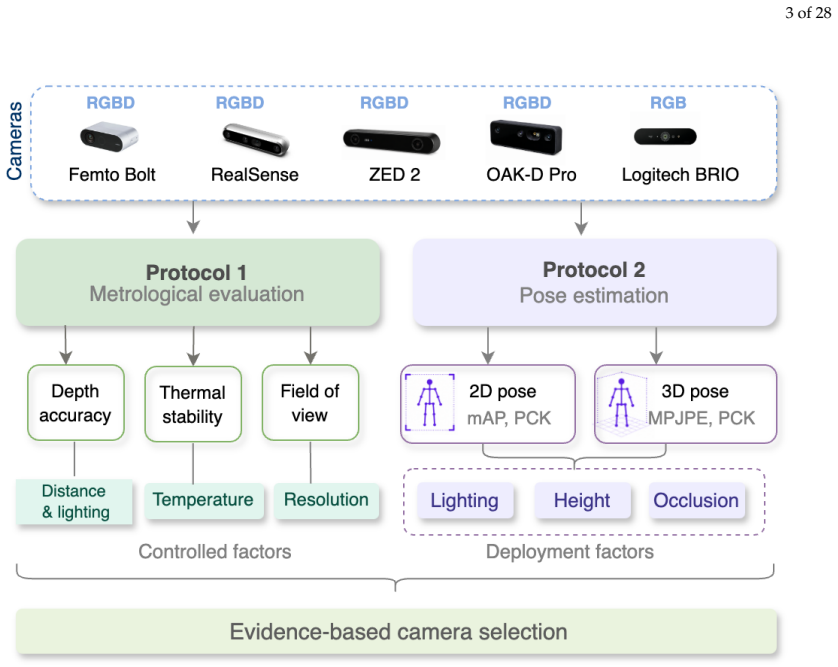
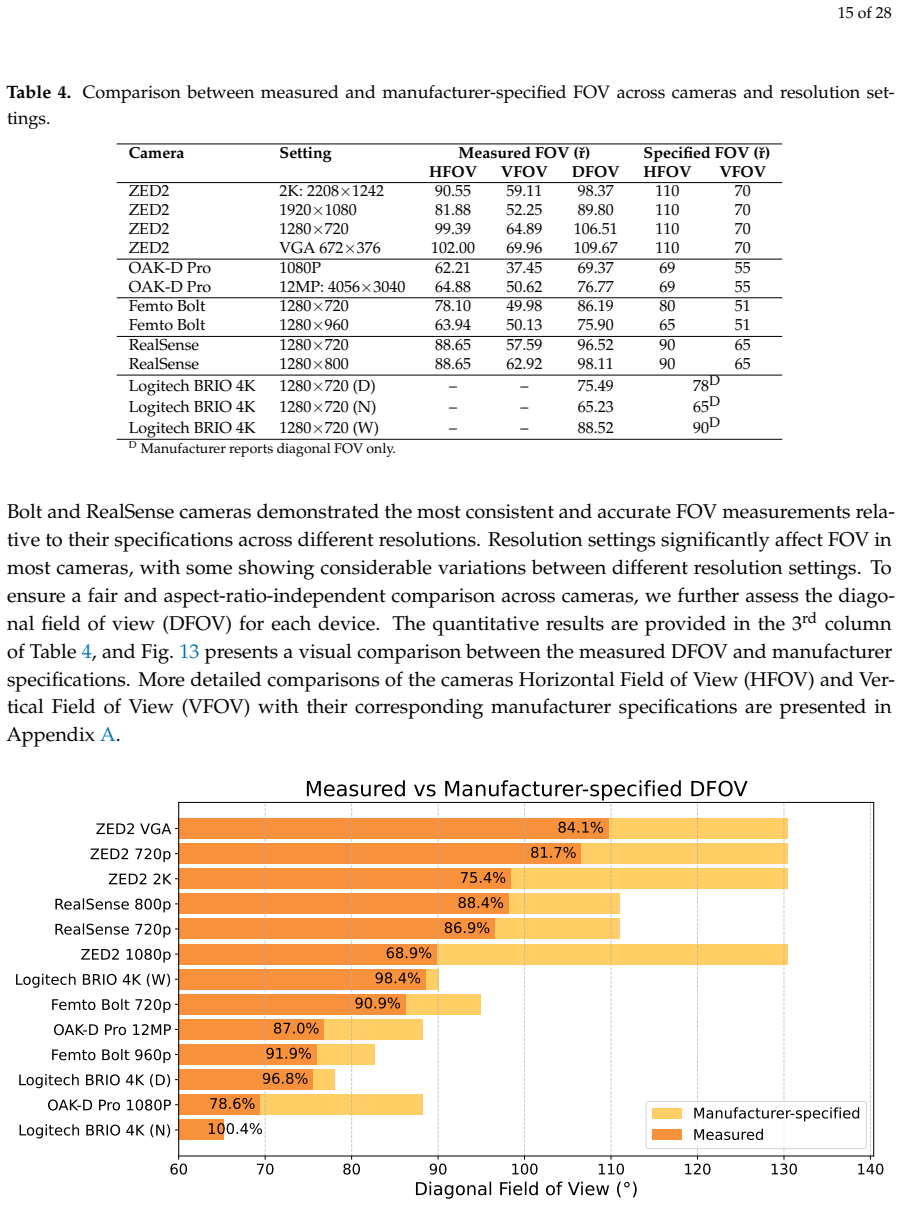
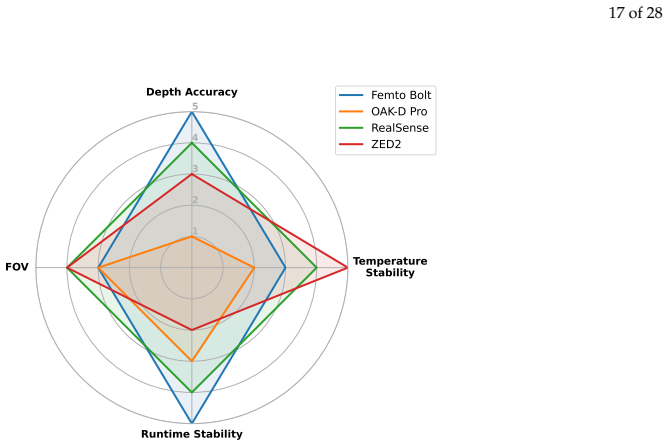
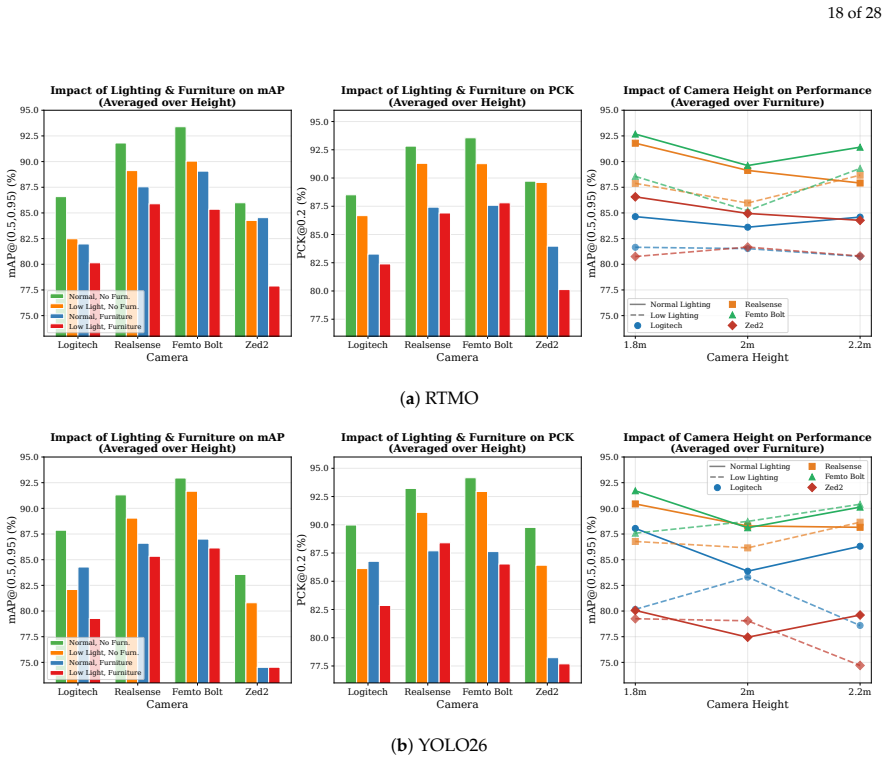
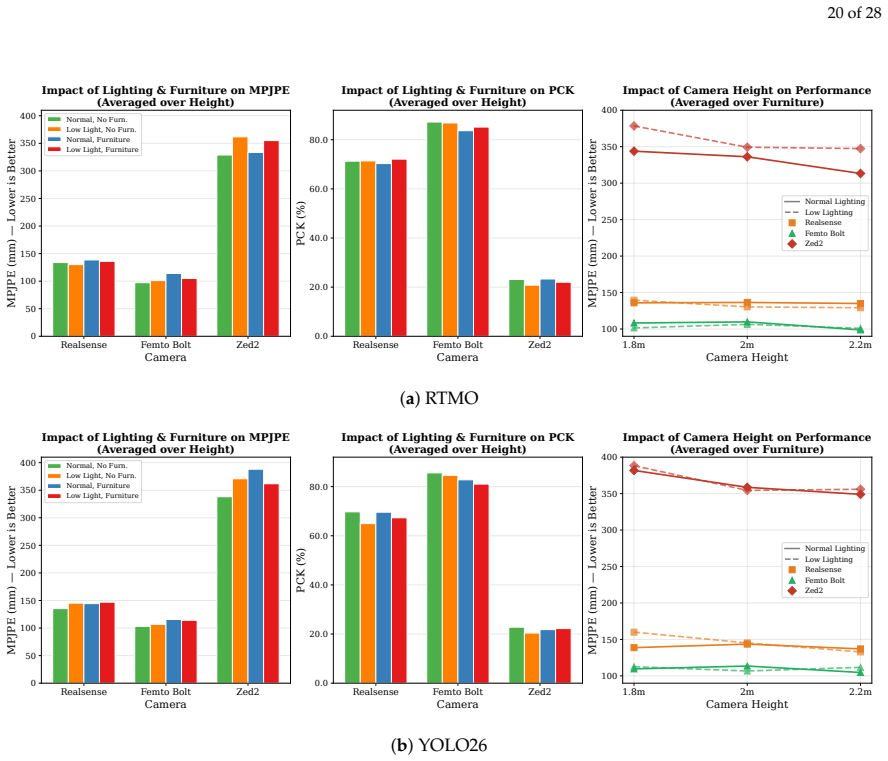
We present two technical validation protocols that evaluate the metrological performance of RGB and RGB-D cameras and their use in supporting human pose estimation. Systematic assessment of five cameras under controlled variations in lighting, camera height, viewing angle, and occlusion level shows depth bias at 5 m ranging from 50 mm to over 1400 mm depending on the device. For 2D pose estimation all cameras achieve comparable accuracy with mean mAP between approximately 78% and 90%, whereas 3D reconstruction error differs markedly with MPJPE ranging from 104 mm to 365 mm, closely reflecting underlying depth-sensing quality. Environmental factors have a camera- and estimator-dependent effec
What carries the argument
Two technical validation protocols that separately quantify metrological performance and pose-estimation support under controlled indoor variations in lighting, height, angle, and occlusion.
Load-bearing premise
The controlled variations in lighting, camera height, viewing angle, and occlusion within representative indoor scenarios adequately capture the practical deployment factors encountered in real-world healthcare settings.
What would settle it
A deployment study in actual patient homes or clinics that measures depth bias and MPJPE under uncontrolled conditions and finds performance spreads that do not match the ordering or magnitudes observed in the controlled tests.
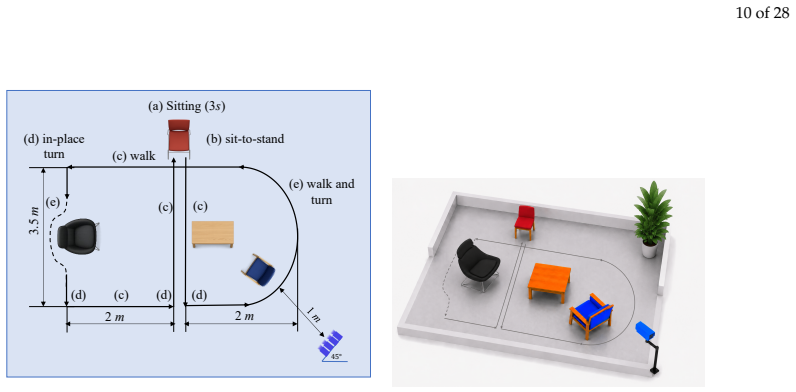
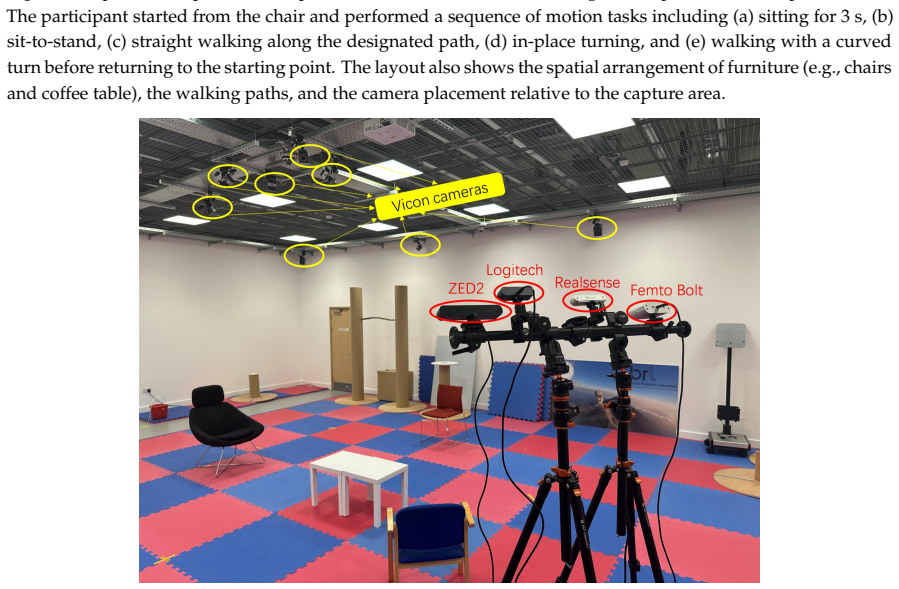
Figures
read the original abstract
Camera-based monitoring systems are increasingly adopted in healthcare settings for the continuous assessment of patient movement and activities. However, their technical performance under real-world indoor conditions remains insufficiently characterised, preventing appropriate camera selection for clinical or home adoption and reproducibility. Existing validation studies typically assess either device metrological performance or algorithm accuracy in isolation, and often do not systematically account for practical deployment factors, such as lighting variability, occlusions, and camera positioning. We present two technical validation protocols: the first evaluates the metrological performance of RGB and RGB-D cameras, and the second assesses their use in supporting human pose estimation, validated using state-of-the-art pose estimators. The proposed protocols systematically assess five cameras, four RGB-D and one RGB, under controlled variations in lighting, camera height, viewing angle, and occlusion level within representative indoor scenarios. The experimental results show that metrological performance varies substantially across cameras, with depth bias at 5 m ranging from 50 mm to over 1400 mm depending on the device. For 2D pose estimation, all cameras achieve broadly comparable accuracy, with mean mAP between approximately 78% and 90% across cameras and estimators, whereas 3D reconstruction error differs markedly across devices, with MPJPE ranging from 104 mm to 365 mm, closely reflecting underlying depth-sensing quality. Environmental factors have a camera- and estimator-dependent effect on 3D performance, while camera mounting height has minimal influence within the evaluated range. This work provides evidence-based guidance for the selection and deployment of cameras in healthcare monitoring applications, addressing an important gap in current technical validation practice.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents two technical validation protocols for RGB and RGB-D cameras in indoor healthcare monitoring: one assessing metrological performance (e.g., depth bias) and the second evaluating support for human pose estimation using state-of-the-art estimators. Five cameras are tested under controlled variations in lighting, camera height, viewing angle, and occlusion within representative indoor scenarios. Key results include substantial cross-device variation in depth bias at 5 m (50 mm to >1400 mm), comparable 2D mAP (78–90%), and markedly different 3D MPJPE (104–365 mm) that tracks depth quality; environmental factors show camera- and estimator-dependent effects while mounting height has minimal influence. The work claims to provide evidence-based guidance for camera selection and deployment, addressing gaps in existing validation practice.
Significance. If the protocols adequately represent practical conditions, the work is significant for filling a gap in systematic, reproducible validation that jointly considers device metrology and algorithm performance under deployment-relevant factors. The explicit linkage between depth-sensing quality and 3D reconstruction error, plus the finding of minimal height influence, offers actionable insights for healthcare applications. The provision of two distinct protocols is a strength for future reproducibility.
major comments (1)
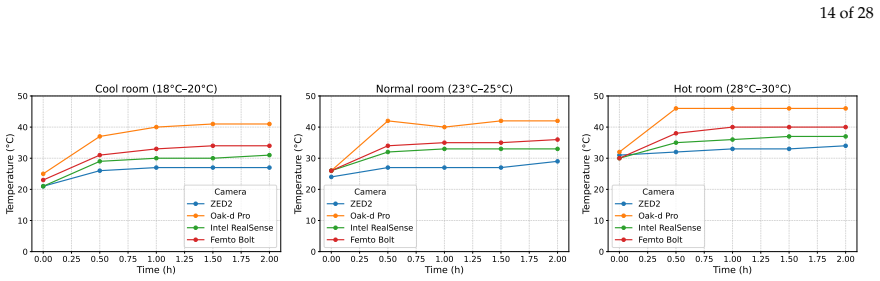
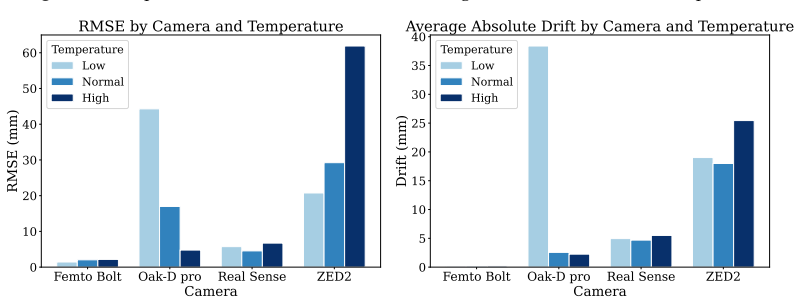
- [Abstract / Methods (experimental design)] Abstract / Methods (experimental design paragraph): The central claim that the protocols supply 'evidence-based guidance for the selection and deployment of cameras in healthcare monitoring applications' rests on the tested variations (lighting, height, angle, occlusion) in 'representative indoor scenarios' being sufficient. However, untested factors such as dynamic multi-person scenes, IR interference from medical devices, long-term thermal drift, and cluttered multi-occupant rooms are not addressed; if these dominate real deployments, the reported ranges (depth bias 50–1400 mm, MPJPE 104–365 mm) and the assertion that 3D error 'closely reflects' depth quality lose generalizability.
minor comments (1)
- [Abstract] Abstract: ranges for mAP ('approximately 78% to 90%') and MPJPE are stated without per-camera values, error bars, or statistical tests; adding a summary table with exact figures and variability measures would strengthen the quantitative claims.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the scope of our experimental design and the generalizability of our claims. We respond point-by-point below.
read point-by-point responses
-
Referee: [Abstract / Methods (experimental design)] Abstract / Methods (experimental design paragraph): The central claim that the protocols supply 'evidence-based guidance for the selection and deployment of cameras in healthcare monitoring applications' rests on the tested variations (lighting, height, angle, occlusion) in 'representative indoor scenarios' being sufficient. However, untested factors such as dynamic multi-person scenes, IR interference from medical devices, long-term thermal drift, and cluttered multi-occupant rooms are not addressed; if these dominate real deployments, the reported ranges (depth bias 50–1400 mm, MPJPE 104–365 mm) and the assertion that 3D error 'closely reflects' depth quality lose generalizability.
Authors: We agree that the tested factors do not exhaustively represent all conditions that may occur in healthcare deployments, and therefore the specific numerical ranges and the strength of the 'closely reflects' linkage are scoped to our controlled single-person indoor setups. The variations we chose (lighting, height, angle, occlusion) were selected because they are common, measurable, and directly affect both metrological accuracy and pose estimation; they also allow reproducible protocol definition. Factors such as dynamic multi-person scenes, IR interference from medical devices, thermal drift over time, and cluttered multi-occupant rooms would require distinct experimental extensions (e.g., multi-person datasets or long-duration thermal cycling) that fall outside the current protocol scope. We will make a partial revision: (1) add an explicit Limitations subsection in the Discussion that lists these untested factors and states that the reported ranges apply to the evaluated conditions; (2) revise the abstract claim from 'provides evidence-based guidance' to 'provides initial evidence-based guidance for the tested deployment factors'. This clarifies the contribution without overstating generalizability while retaining the value of the two protocols and the observed depth-to-3D-error relationship within the tested regime. revision: partial
Circularity Check
No circularity: purely empirical measurements with no derivations or self-referential claims
full rationale
The paper presents two validation protocols and reports direct experimental measurements of camera metrological performance and pose estimation accuracy under controlled conditions. No equations, fitted parameters, predictions, or mathematical derivations are present. All reported values (depth bias ranges, mAP, MPJPE) are stated as observed results from testing five cameras. No self-citations are invoked as load-bearing for any claim, and the central results do not reduce to inputs by construction. This matches the default expectation for an empirical comparison paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption State-of-the-art pose estimators provide a valid proxy for assessing camera utility in 3D reconstruction tasks.
Reference graph
Works this paper leans on
-
[1]
Gait speed and survival in older adults
Stephanie Studenski, Subashan Perera, Kushang Patel, Caterina Rosano, Kimberly Faulkner, Marco Inzitari, Jennifer Brach, Julie Chandler, Peggy Cawthon, Elizabeth Barrett Connor, et al. Gait speed and survival in older adults. Jama, 305(1):50–58, 2011
2011
-
[2]
Moving forward on gait measurement: toward a more refined approach
Sue Lord, Brook Galna, and Lynn Rochester. Moving forward on gait measurement: toward a more refined approach. Movement Disorders, 28(11):1534–1543, 2013
2013
-
[3]
Sit-to-stand analysis in the wild using silhouettes for longitudinal health monitoring
Alessandro Masullo, Tilo Burghardt, Toby Perrett, Dima Damen, and Majid Mirmehdi. Sit-to-stand analysis in the wild using silhouettes for longitudinal health monitoring. In International Conference on Image Analysis and Recognition , pages 175–185. Springer, 2019
2019
-
[4]
Protocol for pd sensors: Parkinsons disease symptom 25 of 28 evaluation in a naturalistic setting producing outcome measures using sphere technology
Catherine Morgan, Ian Craddock, Emma L Tonkin, Kirsi M Kinnunen, Roisin McNaney , Sam Whitehouse, Majid Mirme- hdi, Farnoosh Heidarivincheh, Ryan McConville, Julia Carey , et al. Protocol for pd sensors: Parkinsons disease symptom 25 of 28 evaluation in a naturalistic setting producing outcome measures using sphere technology . an observational feasibilit...
2020
-
[5]
Bridging e-health and the internet of things: The sphere project
Ni Zhu, Tom Diethe, Massimo Camplani, Lili Tao, Alison Burrows, Niall Twomey , Dritan Kaleshi, Majid Mirmehdi, Peter Flach, and Ian Craddock. Bridging e-health and the internet of things: The sphere project. IEEE Intelligent Systems, 30(4):39–46, 2015. doi: 10.1109/MIS.2015.57
-
[6]
Multimodal indoor localisation in parkinson’s disease for detecting medication use: Observational pilot study in a free-living setting
Ferdian Jovan, Catherine Morgan, Ryan McConville, Emma L Tonkin, Ian Craddock, and Alan Whone. Multimodal indoor localisation in parkinson’s disease for detecting medication use: Observational pilot study in a free-living setting. In Proceedings of the 29th ACM SIGKDD Conference on Knowledge Discovery and Data Mining , pages 4273–4283, 2023
2023
-
[7]
Your turn: At home turning angle estimation for parkinsons disease severity assessment
Qiushuo Cheng, Catherine Morgan, Arindam Sikdar, Alessandro Masullo, Alan Whone, and Majid Mirmehdi. Your turn: At home turning angle estimation for parkinsons disease severity assessment. Artificial Intelligence in Medicine, 167: 103194, 2025. ISSN 0933-3657. doi: https://doi.org/10.1016/j.artmed.2025.103194
-
[8]
Real-world wrist-derived digital mobility outcomes in people with multiple long-term conditions: A comparison of algorithms
Dimitrios Megaritis, Lisa Alcock, Kirsty Scott, Hugo Hiden, Andrea Cereatti, Ioannis V ogiatzis, and Silvia Del Din. Real-world wrist-derived digital mobility outcomes in people with multiple long-term conditions: A comparison of algorithms. Bioengineering, 12(10):1108, 2025
2025
-
[9]
Advancements in wearable sensor technologies for health monitoring in terms of clinical applications, rehabilitation, and disease risk assessment: Systematic review
Bonsang Gu, Hyeon Su Kim, HyunBin Kim, and Jun-Il Yoo. Advancements in wearable sensor technologies for health monitoring in terms of clinical applications, rehabilitation, and disease risk assessment: Systematic review. JMIR mHealth and uHealth, 14(1):e76084, 2026
2026
-
[10]
Advancing real-world applications: A scoping review on emerging wearable technologies for recognizing activities of daily living
Mustafa Elhadi Ahmed, Hongnian Yu, Michael Vassallo, and Pelagia Koufaki. Advancing real-world applications: A scoping review on emerging wearable technologies for recognizing activities of daily living. Smart Health, page 100555, 2025
2025
-
[11]
Technical validation of real-world monitoring of gait: a multicentric observational study
Claudia Mazzà, Lisa Alcock, Kamiar Aminian, Clemens Becker, Stefano Bertuletti, Tecla Bonci, Philip Brown, Marina Brozgol, Ellen Buckley , Anne-Elie Carsin, et al. Technical validation of real-world monitoring of gait: a multicentric observational study . BMJ open, 11(12):e050785, 2021
2021
-
[12]
A review of the evolution of vision-based motion analysis and the integration of advanced computer vision methods towards developing a markerless system
Steffi L Colyer, Murray Evans, Darren P Cosker, and Aki IT Salo. A review of the evolution of vision-based motion analysis and the integration of advanced computer vision methods towards developing a markerless system. Sports medicine-open, 4(1):24, 2018
2018
-
[13]
Rgb-d data-based action recognition: a review
Muhammad Bilal Shaikh and Douglas Chai. Rgb-d data-based action recognition: a review. Sensors, 21(12):4246, 2021
2021
-
[14]
Multimodal classification of parkinsons disease in home environments with resiliency to missing modalities
Farnoosh Heidarivincheh, Ryan McConville, Catherine Morgan, Roisin McNaney , Alessandro Masullo, Majid Mirme- hdi, Alan L Whone, and Ian Craddock. Multimodal classification of parkinsons disease in home environments with resiliency to missing modalities. Sensors, 21(12):4133, 2021
2021
-
[15]
Automated real-world video analysis of sit-to-stand transitions predicts parkinsons disease severity
Catherine Morgan, Alessandro Masullo, Majid Mirmehdi, Hanna Kristiina Isotalus, Ferdian Jovan, Ryan McConville, Emma L Tonkin, Alan Whone, and Ian Craddock. Automated real-world video analysis of sit-to-stand transitions predicts parkinsons disease severity . Digital Biomarkers, 7(1):92–103, 2023
2023
-
[16]
Person re-id by fusion of video silhouettes and wearable signals for home monitoring applications
Alessandro Masullo, Tilo Burghardt, Dima Damen, Toby Perrett, and Majid Mirmehdi. Person re-id by fusion of video silhouettes and wearable signals for home monitoring applications. Sensors, 20(9):2576, 2020
2020
-
[17]
No need for a lab: Towards multi-sensory fusion for ambient assisted living in real-world living homes
Alessandro Masullo, Toby Perrett, Dima Damen, Tilo Burghardt, and Majid Mirmehdi. No need for a lab: Towards multi-sensory fusion for ambient assisted living in real-world living homes. In VISIGRAPP (5: VISAPP) , pages 328–337, 2021
2021
-
[18]
A metrological and application-related comparison of six consumer grade stereo depth cameras for the use in robotics
Michel Heinemann, Jonas Herzfeld, Martin Sliwinski, Johannes Hinckeldeyn, and Jochen Kreutzfeldt. A metrological and application-related comparison of six consumer grade stereo depth cameras for the use in robotics. In 2022 IEEE International Symposium on Robotic and Sensors Environments (ROSE) , pages 01–07. IEEE, 2022
2022
-
[19]
Performance evaluation of the 1st and 2nd generation kinect for multimedia applications
Simone Zennaro, Matteo Munaro, Simone Milani, Pietro Zanuttigh, Andrea Bernardi, Stefano Ghidoni, and Emanuele Menegatti. Performance evaluation of the 1st and 2nd generation kinect for multimedia applications. In 2015 IEEE International Conference on Multimedia and Expo (ICME) , pages 1–6. IEEE, 2015
2015
-
[20]
Metro- logical characterization and comparison of d415, d455, l515 realsense devices in the close range
Michaela Servi, Elisa Mussi, Andrea Profili, Rocco Furferi, Yary V olpe, Lapo Governi, and Francesco Buonamici. Metro- logical characterization and comparison of d415, d455, l515 realsense devices in the close range. Sensors, 21(22):7770, 2021
2021
-
[21]
Video- based pose estimation for gait analysis in stroke survivors during clinical assessments: a proof-of-concept study
Luca Lonini, Yaejin Moon, Kyle Embry , R James Cotton, Kelly McKenzie, Sophia Jenz, and Arun Jayaraman. Video- based pose estimation for gait analysis in stroke survivors during clinical assessments: a proof-of-concept study . Digital Biomarkers, 6(1):9–18, 2022. 26 of 28
2022
-
[22]
Influence of the camera viewing angle on openpose validity in motion analysis
Melanie Baldinger, Lara Marie Reimer, and V eit Senner. Influence of the camera viewing angle on openpose validity in motion analysis. Sensors (Basel, Switzerland), 25(3):799, 2025
2025
-
[23]
Design and validation of depth camera-based static posture assessment system
Qingjun Xing, Ruiwei Hong, Yuanyuan Shen, and Yanfei Shen. Design and validation of depth camera-based static posture assessment system. Iscience, 26(10), 2023
2023
-
[24]
Validation of a single rgb-d camera for gait assessment of polyneuropathy patients
Maria do Carmo Vilas-Boas, Ana Patrícia Rocha, Hugo Miguel Pereira Choupina, Márcio Neves Cardoso, José Maria Fernandes, Teresa Coelho, and João Paulo Silva Cunha. Validation of a single rgb-d camera for gait assessment of polyneuropathy patients. Sensors, 19(22):4929, 2019
2019
-
[25]
Validation of a 3d markerless system for gait analysis based on openpose and two rgb webcams
Erika DAntonio, Juri Taborri, Ilaria Mileti, Stefano Rossi, and Fabrizio Patané. Validation of a 3d markerless system for gait analysis based on openpose and two rgb webcams. IEEE Sensors Journal, 21(15):17064–17075, 2021
2021
-
[26]
Comparative abilities of microsoft kinect and vicon 3d motion capture for gait analysis
Alexandra Pfister, Alexandre M West, Shaw Bronner, and Jack Adam Noah. Comparative abilities of microsoft kinect and vicon 3d motion capture for gait analysis. Journal of medical engineering & technology , 38(5):274–280, 2014
2014
-
[27]
Sofia Scataglini, Eveline Abts, Cas Van Bocxlaer, Maxime Van den Bussche, Sara Meletani, and Steven Truijen. Accuracy , validity , and reliability of markerless camera-based 3d motion capture systems versus marker-based 3d motion capture systems in gait analysis: a systematic review and meta-analysis. Sensors, 24(11):3686, 2024
2024
-
[28]
Rtmo: Towards high-performance one-stage real-time multi-person pose estimation
Peng Lu, Tao Jiang, Yining Li, Xiangtai Li, Kai Chen, and Wenming Yang. Rtmo: Towards high-performance one-stage real-time multi-person pose estimation. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1491–1500, 2024
2024
-
[29]
Yolo26: key architectural enhancements and performance benchmarking for real-time object detection
Ranjan Sapkota, Rahul Harsha Cheppally , Ajay Sharda, and Manoj Karkee. Yolo26: key architectural enhancements and performance benchmarking for real-time object detection. arXiv preprint arXiv:2509.25164, 2025
arXiv 2025
-
[30]
A computer vision system for deep learning-based detection of patient mobilization activities in the icu
Serena Yeung, Francesca Rinaldo, Jeffrey Jopling, Bingbin Liu, Rishab Mehra, N Lance Downing, Michelle Guo, Gabriel M Bianconi, Alexandre Alahi, Julia Lee, et al. A computer vision system for deep learning-based detection of patient mobilization activities in the icu. NPJ digital medicine, 2(1):11, 2019
2019
-
[31]
Vision-based human activity recognition system using depth silhou- ettes: A smart home system for monitoring the residents
Kibum Kim, Ahmad Jalal, and Maria Mahmood. Vision-based human activity recognition system using depth silhou- ettes: A smart home system for monitoring the residents. Journal of Electrical Engineering & T echnology, 14(6):2567–2573, 2019
2019
-
[32]
Contactless patient care using hospital iot: Cctv-camera-based physiological monitoring in icu
Haowen Wang, Jia Huang, Guowei Wang, Hongzhou Lu, and Wenjin Wang. Contactless patient care using hospital iot: Cctv-camera-based physiological monitoring in icu. IEEE Internet of Things Journal , 11(4):5781–5797, 2023
2023
-
[33]
Generalized camera-based infant sleep-wake monitoring in nicus: A multi-center clinical trial
Dongmin Huang, Dongfang Yu, Yongshen Zeng, Xiaoyan Song, Liping Pan, Junli He, Lirong Ren, Jie Yang, Hongzhou Lu, and Wenjin Wang. Generalized camera-based infant sleep-wake monitoring in nicus: A multi-center clinical trial. IEEE Journal of Biomedical and Health Informatics , 28(5):3015–3028, 2024
2024
-
[34]
Smarthome-bench: A comprehensive benchmark for video anomaly detection in smart homes using multi-modal large language models
Xinyi Zhao, Congjing Zhang, Pei Guo, Wei Li, Lin Chen, Chaoyue Zhao, and Shuai Huang. Smarthome-bench: A comprehensive benchmark for video anomaly detection in smart homes using multi-modal large language models. In Proceedings of the Computer Vision and Pattern Recognition Conference , pages 3975–3985, 2025
2025
-
[35]
Empowering home security through wall crossing activity detection using vision cameras and convolutional long short-term architecture
Muhammad Omair Khan, Haleem Farman, Md Ariful Islam Mozumder, Bilal Jan, Moustafa M Nasralla, and Hee-Cheol Kim. Empowering home security through wall crossing activity detection using vision cameras and convolutional long short-term architecture. IEEE Sensors Journal, 2025
2025
-
[36]
Inter-trial variability is higher in 3d markerless compared to marker-based motion capture: Implications for data post-processing and analysis
Brian Horsak, Kerstin Prock, Philipp Krondorfer, Tarique Siragy , Mark Simonlehner, and Bernhard Dumphart. Inter-trial variability is higher in 3d markerless compared to marker-based motion capture: Implications for data post-processing and analysis. Journal of Biomechanics, 166:112049, 2024
2024
-
[37]
A systematic review of the applications of markerless motion capture (mmc) technology for clinical measurement in rehabilitation
Winnie WT Lam, Yuk Ming Tang, and Kenneth NK Fong. A systematic review of the applications of markerless motion capture (mmc) technology for clinical measurement in rehabilitation. Journal of NeuroEngineering and Rehabilitation , 20 (1):57, 2023
2023
-
[38]
A multimodal dataset of real-world mobility activities in Parkinsons disease
Catherine Morgan, Emma L Tonkin, Alessandro Masullo, Ferdian Jovan, Arindam Sikdar, Pushpajit Khaire, Majid Mirmehdi, Ryan McConville, Gregory JL Tourte, Alan Whone, and Ian Craddock. A multimodal dataset of real-world mobility activities in Parkinsons disease. Scientific Data, 2023
2023
-
[39]
Impersonal: an iot- aided computer vision framework for social distancing for health safety
Romeo Giuliano, Eros Innocenti, Franco Mazzenga, Anna Maria V egni, and Alessandro Vizzarri. Impersonal: an iot- aided computer vision framework for social distancing for health safety . IEEE Internet of Things Journal , 9(10):7261–7272, 2021
2021
-
[40]
A webcam-based machine learning approach for three-dimensional range of motion evaluation
Xiaoye Michael Wang, Derek T Smith, and Qin Zhu. A webcam-based machine learning approach for three-dimensional range of motion evaluation. PLoS one, 18(10):e0293178, 2023. 27 of 28
2023
-
[41]
Claire Chambers, Nidhi Seethapathi, Rachit Saluja, Helen Loeb, Samuel R. Pierce, Daniel K. Bogen, Laura Prosser, Michelle J. Johnson, and Konrad P . Kording. Computer vision to automatically assess infant neuromotor risk. IEEE T ransactions on Neural Systems and Rehabilitation Engineering, 28(11):2431–2442, 2020. doi: 10.1109/TNSRE.2020.3029121
-
[42]
Supervised classification of bradykinesia in parkinsons disease from smartphone videos
Stefan Williams, Samuel D Relton, Hui Fang, Jane Alty , Rami Qahwaji, Christopher D Graham, and David C Wong. Supervised classification of bradykinesia in parkinsons disease from smartphone videos. Artificial Intelligence in Medicine, 110:101966, 2020
2020
-
[43]
Bradykinesia recognition in parkinsons disease via single rgb video
Bo Lin, Wei Luo, Zhiling Luo, Bo Wang, Shuiguang Deng, Jianwei Yin, and Mengchu Zhou. Bradykinesia recognition in parkinsons disease via single rgb video. ACM T ransactions on Knowledge Discovery from Data (TKDD), 14(2):1–19, 2020
2020
-
[44]
Development of a low-cost markerless optical motion capture system for gait analysis and anthropometric parameter quantification
Laura Alejandra Espitia-Mora, Manuel Andrés Vélez-Guerrero, and Mauro Callejas-Cuervo. Development of a low-cost markerless optical motion capture system for gait analysis and anthropometric parameter quantification. Sensors, 24(11): 3371, 2024
2024
-
[45]
Validation of a markerless motion capture system for centre of mass kinematic analysis
Ruben Valenzuela, Javier Corral, Mikel Diez, Thomas Provot, Francisco J Campa, Saioa Herrero, Erik Macho, and Charles Pinto. Validation of a markerless motion capture system for centre of mass kinematic analysis. Biocybernet- ics and Biomedical Engineering , 45(2):278–286, 2025
2025
-
[46]
Automating the timed up and go test using a depth camera
Amandine Dubois, Titus Bihl, and Jean-Pierre Bresciani. Automating the timed up and go test using a depth camera. Sensors, 18(1):14, 2017
2017
-
[47]
Two-dimensional video-based analysis of human gait using pose estimation
Jan Stenum, Cristina Rossi, and Ryan T Roemmich. Two-dimensional video-based analysis of human gait using pose estimation. PLoS computational biology, 17(4):e1008935, 2021
2021
-
[48]
Kinect-based assessment of lower limbs during gait in post-stroke hemiplegic patients: A narrative review
Serena Cerfoglio, Claudia Ferraris, Luca Vismara, Gianluca Amprimo, Lorenzo Priano, Giuseppe Pettiti, Manuela Galli, Alessandro Mauro, and V eronica Cimolin. Kinect-based assessment of lower limbs during gait in post-stroke hemiplegic patients: A narrative review. Sensors, 22(13):4910, 2022
2022
-
[49]
Estimation of gait parameters in healthy and hemiplegic individuals using azure kinect: a comparative study with the optoelectronic system
Serena Cerfoglio, Claudia Ferraris, Luca Vismara, Gianluca Amprimo, Lorenzo Priano, Matteo Bigoni, Manuela Galli, Alessandro Mauro, and V eronica Cimolin. Estimation of gait parameters in healthy and hemiplegic individuals using azure kinect: a comparative study with the optoelectronic system. Frontiers in bioengineering and biotechnology, 12:1449680, 2024
2024
-
[50]
Openpose: Realtime multi-person 2d pose estimation using part affinity fields
Zhe Cao, Gines Hidalgo, Tomas Simon, Shih-En Wei, and Yaser Sheikh. Openpose: Realtime multi-person 2d pose estimation using part affinity fields. IEEE transactions on pattern analysis and machine intelligence , 43(1):172–186, 2019
2019
-
[51]
Metrological and critical characterization of the intel d415 stereo depth camera
Monica Carfagni, Rocco Furferi, Lapo Governi, Chiara Santarelli, Michaela Servi, Francesca Uccheddu, and Yary V olpe. Metrological and critical characterization of the intel d415 stereo depth camera. Sensors, 19(3):489, 2019
2019
-
[52]
Ex- perimental procedure for the metrological characterization of time-of-flight cameras for human body 3d measurements
Simone Pasinetti, Cristina Nuzzi, Alessandro Luchetti, Matteo Zanetti, Matteo Lancini, and Mariolino De Cecco. Ex- perimental procedure for the metrological characterization of time-of-flight cameras for human body 3d measurements. Sensors, 23(1):538, 2023
2023
-
[53]
Depth accuracy analysis of the zed 2i stereo camera in an indoor environment
Ahmed Abdelsalam, Mostafa Mansour, Jari Porras, and Ari Happonen. Depth accuracy analysis of the zed 2i stereo camera in an indoor environment. Robotics and Autonomous Systems , 179:104753, 2024
2024
-
[54]
Eval- uation of the pose tracking performance of the azure kinect and kinect v2 for gait analysis in comparison with a gold standard: A pilot study
Justin Amadeus Albert, Victor Owolabi, Arnd Gebel, Clemens Markus Brahms, Urs Granacher, and Bert Arnrich. Eval- uation of the pose tracking performance of the azure kinect and kinect v2 for gait analysis in comparison with a gold standard: A pilot study . Sensors, 20(18):5104, 2020
2020
-
[55]
Sina Mehdizadeh, Hoda Nabavi, Andrea Sabo, Twinkle Arora, Andrea Iaboni, and Babak Taati. Concurrent validity of human pose tracking in video for measuring gait parameters in older adults: a preliminary analysis with multiple trackers, viewing angles, and walking directions. Journal of neuroengineering and rehabilitation , 18(1):139, 2021
2021
-
[56]
Low light performance of digital still cameras
Dietmar Wueller. Low light performance of digital still cameras. In Multimedia Content and Mobile Devices , volume 8667, pages 434–442. SPIE, 2013
2013
-
[57]
Mobile phone camera benchmarking in low light environment
V eli-Tapani Peltoketo. Mobile phone camera benchmarking in low light environment. In Image Quality and System Performance XII, volume 9396, pages 68–77. SPIE, 2015
2015
-
[58]
How good are rgb cameras retrieving colors of natural scenes and paintings?a study based on hyperspectral imaging
João MM Linhares, José AR Monteiro, Ana Bailão, Liliana Cardeira, Taisei Kondo, Shigeki Nakauchi, Marcello Picollo, Costanza Cucci, Andrea Casini, Lorenzo Stefani, et al. How good are rgb cameras retrieving colors of natural scenes and paintings?a study based on hyperspectral imaging. Sensors, 20(21):6242, 2020
2020
-
[59]
Low light level digital camera quality assessment
Branko Livada, Dragana Peri´ c, and Saša Vuji´ c. Low light level digital camera quality assessment. Scientific T echnical Review, 71(2):3–13, 2021
2021
-
[60]
Experimental validation of depth cameras for the parameterization of functional balance of patients in clinical tests
Francisco-Ángel Moreno, José Antonio Merchán-Baeza, Manuel González-Sánchez, Javier González-Jiménez, and Anto- nio I Cuesta-Vargas. Experimental validation of depth cameras for the parameterization of functional balance of patients in clinical tests. Sensors, 17(2):424, 2017. 28 of 28
2017
-
[61]
Validation, reliability , and responsiveness outcomes of kinematic assessment with an rgb-d camera to analyze movement in subacute and chronic low back pain
Manuel Trinidad-Fernández, David Beckwée, Antonio Cuesta-Vargas, Manuel González-Sánchez, Francisco-Angel Moreno, Javier González-Jiménez, Erika Joos, and Peter Vaes. Validation, reliability , and responsiveness outcomes of kinematic assessment with an rgb-d camera to analyze movement in subacute and chronic low back pain. Sensors, 20 (3):689, 2020
2020
-
[62]
Full-body motion assessment: Concurrent validation of two body tracking depth sensors versus a gold standard system during gait
Maria do Carmo Vilas-Boas, Hugo Miguel Pereira Choupina, Ana Patrícia Rocha, José Maria Fernandes, and João Paulo Silva Cunha. Full-body motion assessment: Concurrent validation of two body tracking depth sensors versus a gold standard system during gait. Journal of biomechanics, 87:189–196, 2019
2019
-
[63]
Validation of an ambient system for the measurement of gait parameters
Amandine Dubois and Jean-Pierre Bresciani. Validation of an ambient system for the measurement of gait parameters. Journal of biomechanics, 69:175–180, 2018
2018
-
[64]
Deeplabcut: markerless pose estimation of user-defined body parts with deep learning
Alexander Mathis, Pranav Mamidanna, Kevin M Cury , Taiga Abe, V enkatesh N Murthy , Mackenzie Weygandt Mathis, and Matthias Bethge. Deeplabcut: markerless pose estimation of user-defined body parts with deep learning. Nature neuroscience, 21(9):1281–1289, 2018
2018
-
[65]
Validity of ai-based gait analysis for simultaneous measurement of bilateral lower limb kinematics using a single video camera
Takumi Ino, Mina Samukawa, Tomoya Ishida, Naofumi Wada, Yuta Koshino, Satoshi Kasahara, and Harukazu Tohyama. Validity of ai-based gait analysis for simultaneous measurement of bilateral lower limb kinematics using a single video camera. Sensors, 23(24):9799, 2023
2023
-
[66]
Vision-based method for automatic quantification of parkinsonian bradykinesia
Yu Liu, Jiansheng Chen, Chunhua Hu, Yu Ma, Dongyun Ge, Suhua Miao, Youze Xue, and Luming Li. Vision-based method for automatic quantification of parkinsonian bradykinesia. IEEE T ransactions on Neural Systems and Rehabilitation Engineering, 27(10):1952–1961, 2019
1952
-
[67]
Robust self-adaptation fall-detection system based on camera height
Xiangbo Kong, Lehan Chen, Zhichen Wang, Yuxi Chen, Lin Meng, and Hiroyuki Tomiyama. Robust self-adaptation fall-detection system based on camera height. Sensors, 19(17):3768, 2019
2019
-
[68]
A method to compensate for the errors caused by temperature in structured-light 3d cameras
Oriol Vila, Imma Boada, David Raba, and Esteve Farres. A method to compensate for the errors caused by temperature in structured-light 3d cameras. Sensors, 21(6):2073, 2021
2073
-
[69]
Microsoft coco: Common objects in context
Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Dollár, and C Lawrence Zitnick. Microsoft coco: Common objects in context. In European conference on computer vision , pages 740–755. Springer, 2014
2014
-
[70]
A comparison of the accuracy of several hip center location prediction methods
Alexander L Bell, Douglas R Pedersen, and Richard A Brand. A comparison of the accuracy of several hip center location prediction methods. Journal of biomechanics, 23(6):617–621, 1990
1990
-
[71]
Mediapipe: A framework for building perception pipelines
Camillo Lugaresi, Jiuqiang Tang, Hadon Nash, Chris McClanahan, Esha Uboweja, Michael Hays, Fan Zhang, Chuo- Ling Chang, Ming Guang Yong, Juhyun Lee, et al. Mediapipe: A framework for building perception pipelines. arXiv preprint arXiv:1906.08172, 2019
Pith/arXiv arXiv 1906
-
[72]
Alphapose: Whole-body regional multi-person pose estimation and tracking in real-time
Hao-Shu Fang, Jiefeng Li, Hongyang Tang, Chao Xu, Haoyi Zhu, Yuliang Xiu, Yong-Lu Li, and Cewu Lu. Alphapose: Whole-body regional multi-person pose estimation and tracking in real-time. IEEE transactions on pattern analysis and machine intelligence, 45(6):7157–7173, 2022
2022
-
[73]
2d human pose estimation: New benchmark and state of the art analysis
Mykhaylo Andriluka, Leonid Pishchulin, Peter Gehler, and Bernt Schiele. 2d human pose estimation: New benchmark and state of the art analysis. In Proceedings of the IEEE Conference on computer Vision and Pattern Recognition , pages 3686–3693, 2014
2014
-
[74]
Catalin Ionescu, Dragos Papava, Vlad Olaru, and Cristian Sminchisescu. Human3. 6m: Large scale datasets and predictive methods for 3d human sensing in natural environments. IEEE transactions on pattern analysis and machine intelligence, 36(7):1325–1339, 2013
2013
-
[75]
Monocular 3d human pose estimation in the wild using improved cnn supervision
Dushyant Mehta, Helge Rhodin, Dan Casas, Pascal Fua, Oleksandr Sotnychenko, Weipeng Xu, and Christian Theobalt. Monocular 3d human pose estimation in the wild using improved cnn supervision. In 2017 international conference on 3D vision (3DV), pages 506–516. IEEE, 2017
2017
-
[76]
Flexible camera calibration by viewing a plane from unknown orientations
Zhengyou Zhang. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the seventh ieee international conference on computer vision , volume 1, pages 666–673. Ieee, 1999
1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.