Do Rigid-Body Simulators Dream of Soft Robots? Learning Contact-Rich Manipulation for Tendon-Driven Continuum Robots
Pith reviewed 2026-06-26 10:25 UTC · model grok-4.3
The pith
A continuum-mechanics discretization places tendon-driven continuum robots inside MuJoCo so policies for contact-rich tasks transfer zero-shot to hardware.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
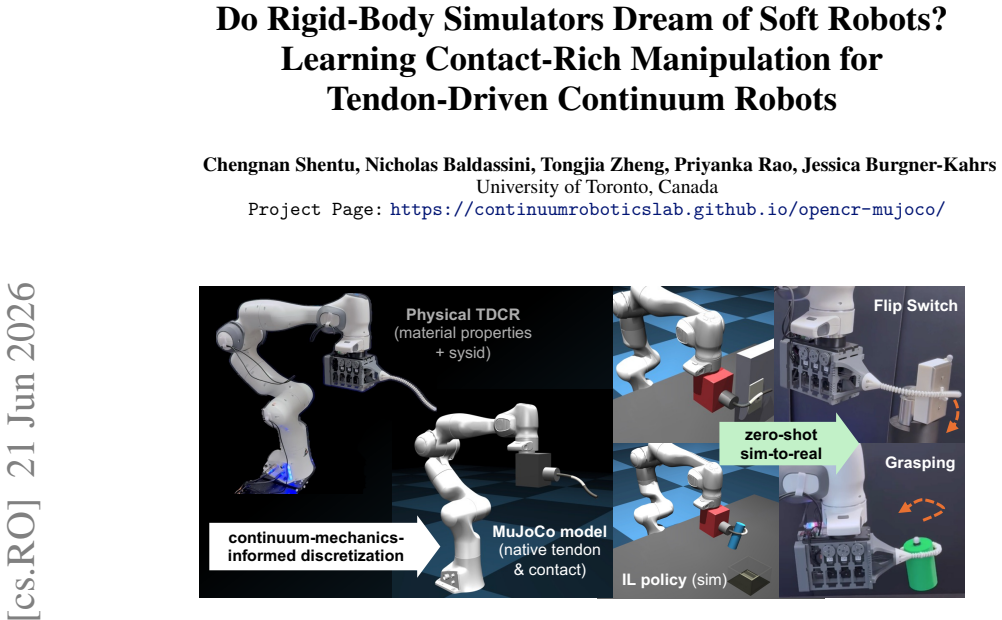
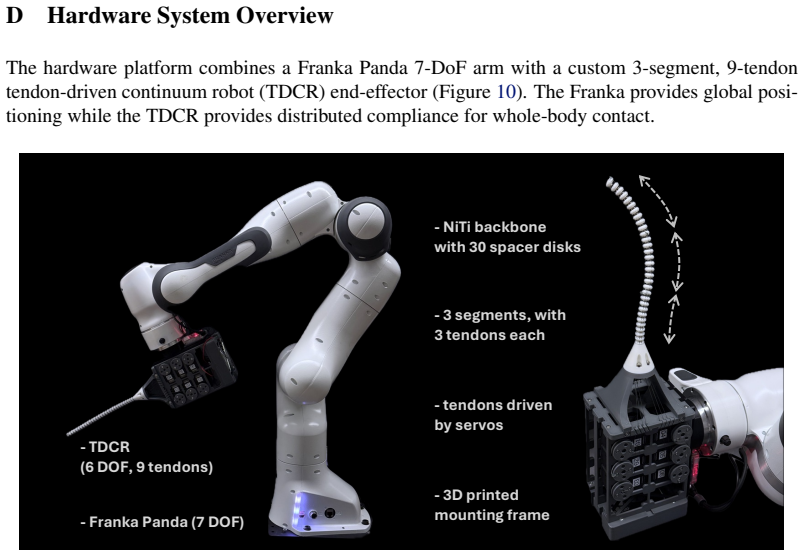
By deriving a continuum-mechanics-informed discretization, the authors embed tendon-driven continuum robots natively inside MuJoCo, unifying tendon forces, body contact, and dynamics inside one physics engine. State-based imitation policies trained via simulation teleoperation deploy zero-shot to physical hardware on contact-rich manipulation tasks, providing the first reported sim-to-real transfer of this kind for continuum robots.
What carries the argument
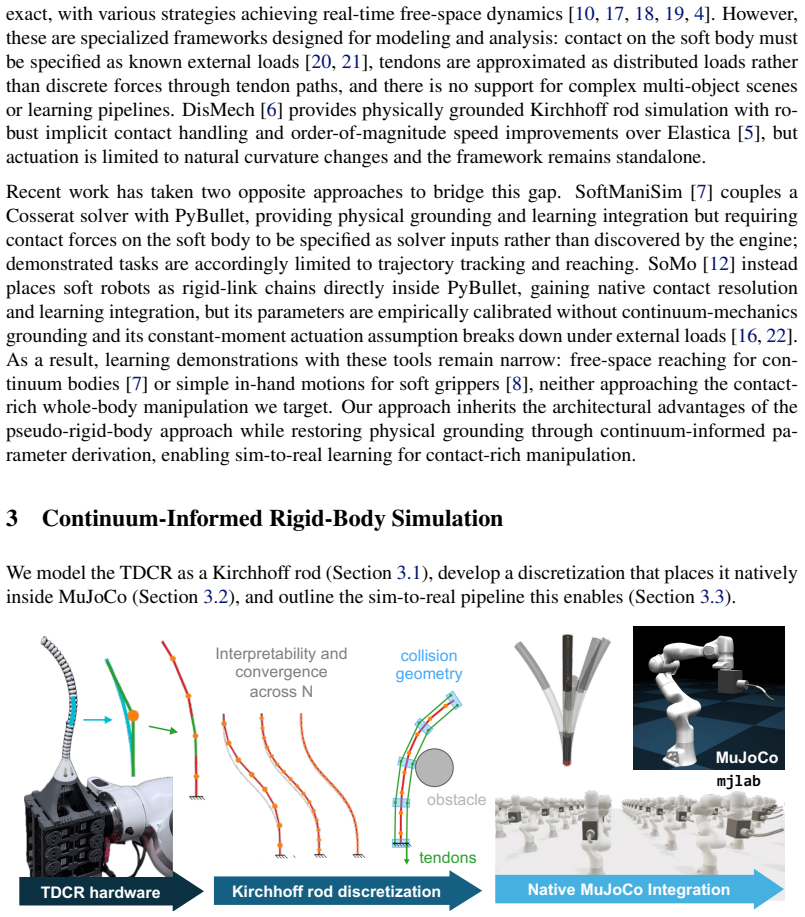
The continuum-mechanics-informed discretization that places the tendon-driven continuum robot inside MuJoCo's native physics pipeline.
If this is right
- Policies trained entirely in the new simulator transfer directly to the real 3-segment TDCR on a Franka arm without domain randomization.
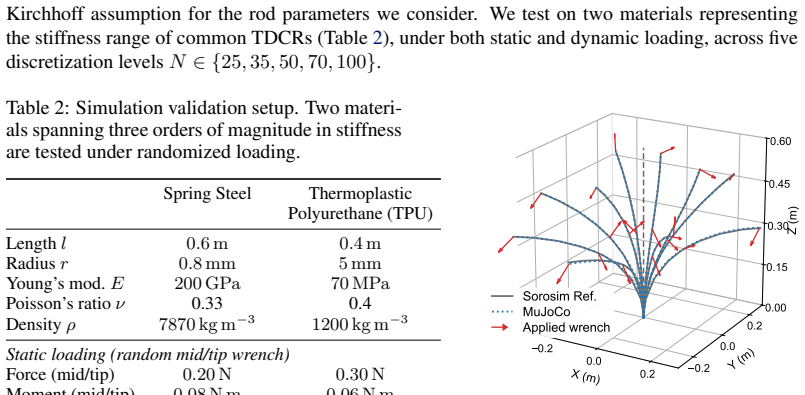
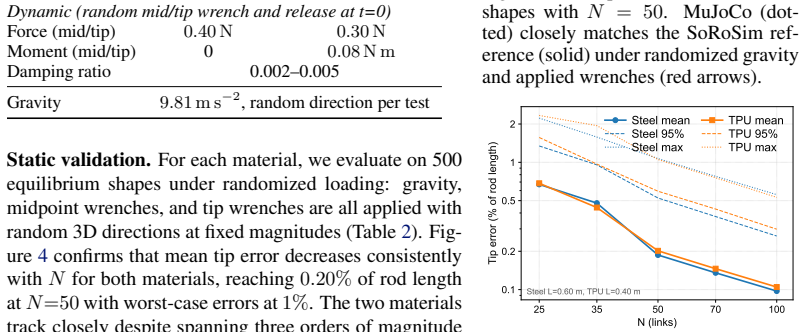
- The discretization is validated against both Cosserat-rod static and dynamic solutions and against physical hardware measurements.
- Tendon forces, whole-body contact, and rigid-body dynamics are handled together inside one MuJoCo pipeline.
- Imitation learning from teleoperation demonstrations becomes feasible for contact-rich continuum-robot tasks.
Where Pith is reading between the lines
- The same discretization pattern could be tested on other soft-robot morphologies or inside additional rigid-body engines.
- It opens a route to apply reinforcement-learning methods already mature for rigid robots to continuum platforms.
- Scaling the approach to robots with more segments or to deformable-object interactions would test how far the mechanics-informed reduction holds.
- Success here suggests that hybrid rigid-soft modeling may be viable for other classes of continuum or cable-driven systems.
Load-bearing premise
The discretization must capture the dynamics and contact behavior of the real tendon-driven continuum robot closely enough that policies trained in simulation succeed on hardware without retraining.
What would settle it
Run the learned policies on the physical three-segment TDCR and measure whether task success rates and observed contact forces match those recorded in the same simulated tasks.
Figures
read the original abstract
Learning contact-rich, whole-body manipulation for soft continuum robots is held back by the lack of simulation infrastructure that has accelerated rigid-robot manipulation. Existing soft robot simulators are physically grounded but lack the contact handling, actuation support, or learning integration needed for contact-rich manipulation; rigid-body approximations offer these capabilities but sacrifice physical grounding. We bridge this gap for tendon-driven continuum robots (TDCRs) by deriving a continuum-mechanics-informed discretization that places the soft robot natively inside MuJoCo, unifying tendon forces, body contact, and dynamics in a single physics pipeline. We validate the simulator against a Cosserat rod reference (static and dynamic) and real TDCR hardware. We then train state-based imitation learning policies via teleoperation in simulation and deploy them zero-shot to a physical 3-segment TDCR on a 7-DoF Franka arm across two contact-rich manipulation tasks. To our knowledge, this is the first demonstration of sim-to-real transfer for contact-rich manipulation with continuum robots.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to derive a continuum-mechanics-informed discretization that places tendon-driven continuum robots (TDCRs) natively inside MuJoCo, unifying tendon actuation, body contact, and dynamics. The simulator is validated against a Cosserat rod reference in both static and dynamic regimes as well as against real TDCR hardware. State-based imitation-learning policies are then trained via teleoperation in simulation and deployed zero-shot on a physical 3-segment TDCR mounted on a 7-DoF Franka arm for two contact-rich manipulation tasks; the work asserts this is the first such sim-to-real demonstration for contact-rich continuum-robot manipulation.
Significance. If the discretization accurately reproduces the contact forces and whole-body dynamics required by the target tasks, the work would supply a practical simulation platform that combines the contact-handling and learning-integration strengths of rigid-body engines with sufficient physical grounding for soft robots. This could accelerate policy learning for continuum manipulators in contact-rich settings where existing soft-robot simulators fall short.
major comments (3)
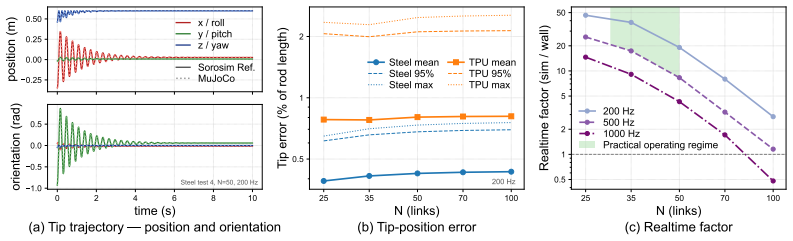
- [Abstract] Abstract: validation is reported against the Cosserat rod (static and dynamic) and real hardware, yet no quantitative error metrics, number of trials, or details on contact-parameter selection are supplied. Because the central claim is zero-shot policy transfer on contact-rich tasks, the absence of these numbers leaves the fidelity of the discretization in the relevant contact geometries unverified.
- [Hardware validation paragraph] Hardware validation paragraph: the reported tests cover static and dynamic rod behavior but do not indicate that the same contact geometries, tendon tensions under load, or multi-segment collisions present in the two manipulation tasks were exercised. Without such evidence or accompanying error metrics, the successful transfer does not yet demonstrate that the MuJoCo discretization captures the contact behavior sufficiently for the zero-shot claim.
- [Experiments / Policy deployment] The assumption that the continuum-mechanics-informed discretization is adequate for zero-shot transfer without domain randomization or retraining is load-bearing; the current validation evidence does not directly test this assumption in the contact regimes of the deployed tasks.
minor comments (2)
- The abstract would be strengthened by the inclusion of at least one key quantitative result (e.g., mean position error or success rate) from the validation and transfer experiments.
- Notation for the discretization parameters and tendon-force mapping could be introduced earlier to improve readability for readers unfamiliar with TDCR modeling.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major point below, clarifying the validation evidence in the manuscript and indicating revisions where the presentation can be strengthened.
read point-by-point responses
-
Referee: [Abstract] Abstract: validation is reported against the Cosserat rod (static and dynamic) and real hardware, yet no quantitative error metrics, number of trials, or details on contact-parameter selection are supplied. Because the central claim is zero-shot policy transfer on contact-rich tasks, the absence of these numbers leaves the fidelity of the discretization in the relevant contact geometries unverified.
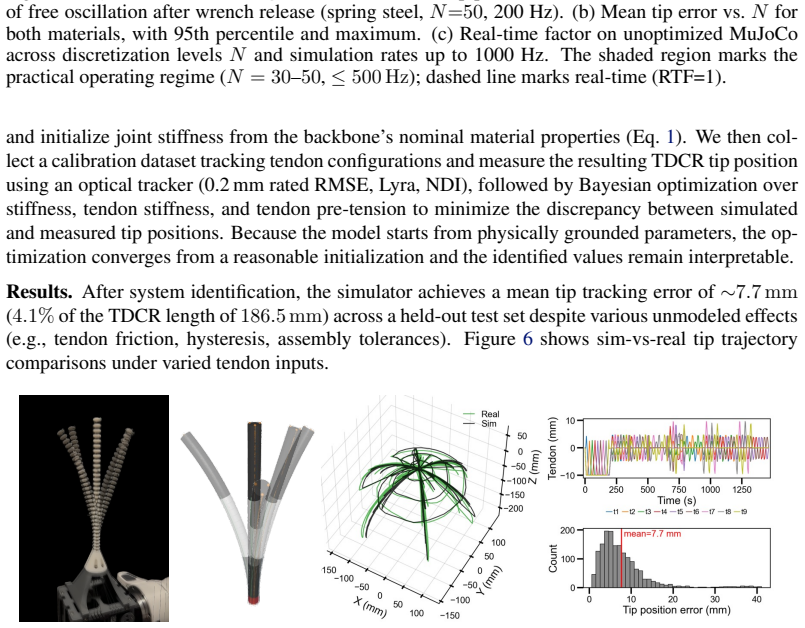
Authors: The abstract is intentionally concise. Quantitative error metrics (mean position/orientation errors with standard deviations over 50 trials for static and dynamic Cosserat comparisons) appear in Section 4.1; contact-parameter selection from material properties and hardware tuning is described in Section 3.2. We will revise the abstract to reference these key metrics and add a sentence on contact-geometry coverage. revision: yes
-
Referee: [Hardware validation paragraph] Hardware validation paragraph: the reported tests cover static and dynamic rod behavior but do not indicate that the same contact geometries, tendon tensions under load, or multi-segment collisions present in the two manipulation tasks were exercised. Without such evidence or accompanying error metrics, the successful transfer does not yet demonstrate that the MuJoCo discretization captures the contact behavior sufficiently for the zero-shot claim.
Authors: Section 4.2 includes hardware tests with multi-segment configurations and varying tendon tensions, some involving contact. We acknowledge that the precise contact geometries and collisions from the two manipulation tasks are not separately exercised or metrically compared in that section. The zero-shot success provides indirect support, but we will add task-specific contact-force error metrics in the revision. revision: yes
-
Referee: [Experiments / Policy deployment] The assumption that the continuum-mechanics-informed discretization is adequate for zero-shot transfer without domain randomization or retraining is load-bearing; the current validation evidence does not directly test this assumption in the contact regimes of the deployed tasks.
Authors: The discretization unifies continuum mechanics and MuJoCo contact handling; validation against Cosserat (static/dynamic) plus hardware, followed by successful zero-shot deployment on the two contact-rich tasks, directly supports adequacy without randomization. We will expand Section 5 to explicitly map validation regimes to the task contact conditions. revision: partial
Circularity Check
No significant circularity in derivation chain
full rationale
The paper derives a new continuum-mechanics-informed discretization for placing TDCRs in MuJoCo, validates the model against an external Cosserat-rod reference (static/dynamic) and physical hardware, then trains imitation policies in simulation for zero-shot deployment. No load-bearing step reduces a claimed prediction or result to a fitted parameter or self-citation by construction; the transfer success is presented as an empirical outcome of the modeling choice rather than a tautology. The provided abstract and reader assessment confirm the central claim retains independent content from external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Continuum mechanics model (Cosserat rod) provides a faithful reference for both static and dynamic behavior of the TDCR.
Reference graph
Works this paper leans on
-
[1]
Todorov, T
E. Todorov, T. Erez, and Y . Tassa. Mujoco: A physics engine for model-based control. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5026–
2012
-
[2]
Solving Rubik's Cube with a Robot Hand
I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribas, et al. Solving rubik’s cube with a robot hand.arXiv preprint arXiv:1910.07113, 2019
work page internal anchor Pith review Pith/arXiv arXiv 1910
- [3]
-
[4]
A. T. Mathew, I. B. Hmida, C. Armanini, F. Boyer, and F. Renda. Sorosim: A matlab toolbox for hybrid rigid–soft robots based on the geometric variable-strain approach.IEEE Robotics & Automation Magazine, 30(3):106–122, 2022
2022
-
[5]
Gazzola, L
M. Gazzola, L. H. Dudte, A. G. McCormick, and L. Mahadevan. Forward and inverse problems in the mechanics of soft filaments.Royal Society open science, 5(6):171628, 2018
2018
-
[6]
A. Choi, R. Jing, A. P. Sabelhaus, and M. K. Jawed. Dismech: A discrete differential geometry- based physical simulator for soft robots and structures.IEEE Robotics and Automation Letters, 9(4):3483–3490, 2024
2024
-
[7]
Kasaei, H
M. Kasaei, H. Kasaei, and M. Khadem. Softmanisim: A fast simulation framework for multi- segment continuum manipulators tailored for robot learning. In8th Annual Conference on Robot Learning, 2024
2024
-
[8]
M. A. Graule, T. P. McCarthy, C. B. Teeple, J. Werfel, and R. J. Wood. Somogym: A toolkit for developing and evaluating controllers and reinforcement learning algorithms for soft robots. IEEE Robotics and Automation Letters, 7(2):4071–4078, 2022
2022
-
[9]
Faure, C
F. Faure, C. Duriez, H. Delingette, J. Allard, B. Gilles, S. Marchesseau, H. Talbot, H. Courte- cuisse, G. Bousquet, I. Peterlik, and S. Cotin. Sofa: A multi-model framework for interac- tive physical simulation.Soft Tissue Biomechanical Modeling for Computer Assisted Surgery, pages 283–321, 2012
2012
-
[10]
J. Till, V . Aloi, and C. Rucker. Real-time dynamics of soft and continuum robots based on cosserat rod models.The International Journal of Robotics Research, 38(6):723–746, 2019
2019
-
[11]
Naughton, J
N. Naughton, J. Sun, A. Tekinalp, T. Parthasarathy, G. Chowdhary, and M. Gazzola. Elastica: A compliant mechanics environment for soft robotic control.IEEE Robotics and Automation Letters, 6(2):3389–3396, 2021
2021
-
[12]
M. A. Graule, C. B. Teeple, T. P. McCarthy, G. R. Kim, R. C. S. Louis, and R. J. Wood. Somo: Fast and accurate simulations of continuum robots in complex environments. In2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 3934–3941. IEEE, 2021
2021
-
[13]
Armanini, F
C. Armanini, F. Boyer, A. T. Mathew, C. Duriez, and F. Renda. Soft robots modeling: A structured overview.IEEE Transactions on Robotics, 39(3):1728–1748, 2023
2023
-
[14]
C. Duriez. Control of elastic soft robots based on real-time finite element method. In2013 IEEE International Conference on Robotics and Automation, pages 3982–3987. IEEE, 2013
2013
-
[15]
Goury, S
O. Goury, S. M. Youssef, S. Le Berre, and C. Duriez. Towards real-time simulation of soft robots with contacts using a method of hybrid hyper-reduction. InIEEE ROBOSOFT 2025, 2025. 9
2025
-
[16]
D. C. Rucker and R. J. Webster III. Statics and dynamics of continuum robots with general tendon routing and external loading.IEEE Transactions on Robotics, 27(6):1033–1044, 2011
2011
-
[17]
Renda, M
F. Renda, M. Giorelli, M. Calisti, M. Cianchetti, and C. Laschi. Dynamic model of a multi- bending soft robot arm driven by cables.IEEE Transactions on Robotics, 30(5):1109–1122, 2014
2014
-
[18]
Renda, F
F. Renda, F. Boyer, J. Dias, and L. Seneviratne. Discrete cosserat approach for multisection soft manipulator dynamics.IEEE Transactions on Robotics, 34(6):1518–1533, 2018
2018
-
[19]
Renda, C
F. Renda, C. Armanini, V . Lebastard, F. Candelier, and F. Boyer. A geometric variable-strain approach for static modeling of soft manipulators with tendon and fluidic actuation.IEEE Robotics and Automation Letters, 5(3):4006–4013, 2020
2020
-
[20]
Wiese, R
M. Wiese, R. Berthold, M. Wangenheim, and A. Raatz. Describing and analyzing mechani- cal contact for continuum robots using a shooting-based cosserat rod implementation.IEEE Robotics and Automation Letters, 9(2):1668–1675, 2023
2023
-
[21]
L. Xun, G. Zheng, and A. Kruszewski. Cosserat-rod based dynamic modeling of soft slender robot interacting with environment.IEEE Transactions on Robotics, 2024
2024
-
[22]
D. B. Camarillo, C. F. Milne, C. R. Carlson, M. R. Zinn, and J. K. Salisbury. Mechanics modeling of tendon-driven continuum manipulators.IEEE Transactions on Robotics, 24(6): 1262–1273, 2008
2008
-
[23]
L. L. Howell.Compliant Mechanisms. John Wiley & Sons, 2001
2001
-
[24]
Della Santina, R
C. Della Santina, R. K. Katzschmann, A. Bicchi, and D. Rus. Model-based dynamic feedback control of a planar soft robot: trajectory tracking and interaction with the environment.The International Journal of Robotics Research, 39(4):490–513, 2020
2020
-
[25]
Zakka, Q
K. Zakka, Q. Liao, B. Yi, L. L. Lay, K. Sreenath, and P. Abbeel. mjlab: A lightweight framework for gpu-accelerated robot learning, 2026. URLhttps://arxiv.org/abs/2601. 22074
2026
-
[26]
T. Z. Zhao, V . Kumar, S. Levine, and C. Finn. Learning fine-grained bimanual manipulation with low-cost hardware.Proceedings of Robotics: Science and Systems, 2023. doi:10.15607/ RSS.2023.XIX.016
2023
-
[27]
Della Santina, C
C. Della Santina, C. Duriez, and D. Rus. Model-based control of soft robots: A survey of the state of the art and open challenges.IEEE Control Systems Magazine, 43(3):30–65, 2023
2023
-
[28]
Deimel and O
R. Deimel and O. Brock. A novel type of compliant and underactuated robotic hand for dex- terous grasping.The International Journal of Robotics Research, 35(1-3):161–185, 2016
2016
- [29]
-
[30]
Z. Chen, D. Wu, Q. Guan, D. Hardman, F. Renda, J. Hughes, T. G. Thuruthel, C. Della Santina, B. Mazzolai, H. Zhao, et al. A survey on soft robot adaptability: Implementations, applications, and prospects.IEEE Robotics & Automation Magazine, 2025
2025
-
[31]
Boyer, V
F. Boyer, V . Lebastard, F. Candelier, and F. Renda. Dynamics of continuum and soft robots: A strain parameterization based approach.IEEE Transactions on Robotics, 37(3):847–863, 2020
2020
-
[32]
Tummers, V
M. Tummers, V . Lebastard, F. Boyer, J. Troccaz, B. Rosa, and M. T. Chikhaoui. Cosserat rod modeling of continuum robots from newtonian and lagrangian perspectives.IEEE Transactions on Robotics, 39(3):2360–2378, 2023. 10
2023
-
[33]
K. Lee, C. Shentu, C. Pogue, and J. Burgner-Kahrs. Automating tension calibration for tendon- driven continuum robots: A low-cost approach towards consistent teleoperation. In2025 IEEE International Conference on Robotics and Automation, pages 14008–14014. IEEE, 2025. 11 A Full Cosserat Rod Equations We present the Cosserat rod model in the Lie group form...
2025
-
[34]
The arc-length parametersequals the physical length along the rod (no extension), so segment boundaries are fixed in the material frame
-
[35]
Each constant-strain segment traces a circular arc, enabling the tangent link construction. For general Cosserat rods with shear and extension (v̸= (0,0,1) T ), neither property holds: the physical length changes with deformation, and constant-strain segments trace more general curves (not circular arcs). Extending the discretization to this case would re...
-
[36]
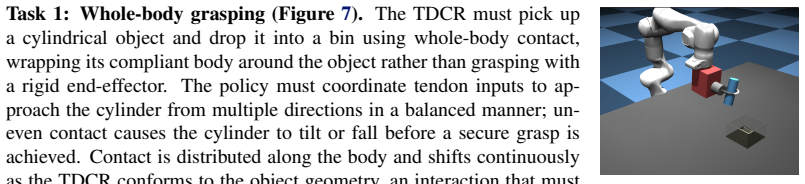
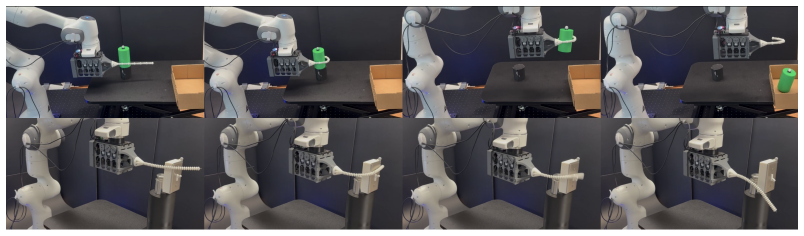
The cylinder spawns in a random location (Table 5) on the table
-
[37]
The TDCR unit mounted to the Franka end effector is moved near the cylinder on the table
-
[38]
The TDCR wraps around the cylinder
-
[39]
The cylinder is lifted off the table by actuating the Franka arm while the TDCR continues to grasp the cylinder
-
[40]
The cylinder is moved towards the target bin location by actuating the Franka arm while the TDCR continues to grasp the cylinder
-
[41]
The cylinder is hovering over the target bin and the Franka arm stops actuating
-
[42]
The TDCR uncurls and releases the cylinder from its grasp
-
[43]
The criteria for a successful demonstration ofTask 2: Flip switch from behind (Figure 8)is defined as:
The cylinder falls into the target bin. The criteria for a successful demonstration ofTask 2: Flip switch from behind (Figure 8)is defined as:
-
[44]
The switch is mounted on a plate facing away from the robot
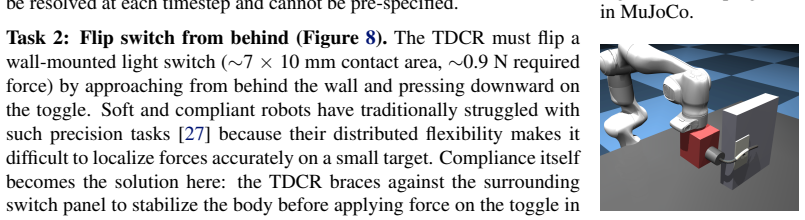
The switch spawns in a random position in the workspace (Table 5). The switch is mounted on a plate facing away from the robot. The switch starts in theonposition pointing upwards. 18
-
[45]
The TDCR unit mounted to the Franka end effector approaches the wall from behind
-
[46]
The TDCR bends towards the switch and makes contact with the plate
-
[47]
The TDCR bends downwards applying force to the switch lever
-
[48]
The switch lever is flicked, pointing downwards into theoffposition
-
[49]
The TDCR and Franka retract from the switch plate
-
[50]
For a demonstration to be considered successful, the operator must perform the above steps in order
The demonstration completes when the tip position of the TDCR is behind the wall. For a demonstration to be considered successful, the operator must perform the above steps in order. For example, if the operator drops the cylinder while transporting it to the target bin, retrieves the fallen cylinder and still drops it into the bin, this demonstration is ...
2048
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.