Informative Path Planning with Guaranteed Estimation Uncertainty
Pith reviewed 2026-05-16 07:45 UTC · model grok-4.3
The pith
The shortest path for a robot to measure an environmental field can be computed so that Gaussian process posterior variance stays below any chosen threshold everywhere in the region.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that transforming a learned GP kernel into binary coverage maps and routing a vehicle to cover the indicated locations computes the shortest path whose measurements keep posterior variance upper-bounded by a user-specified threshold over the entire monitoring region, with near-optimal approximation guarantees for both sensing-location selection and the joint selection-routing problem.
What carries the argument
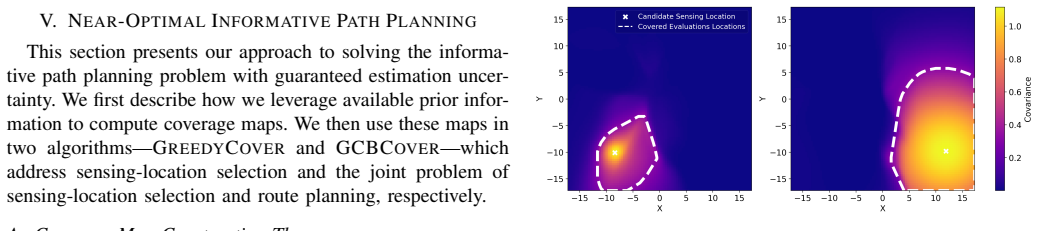
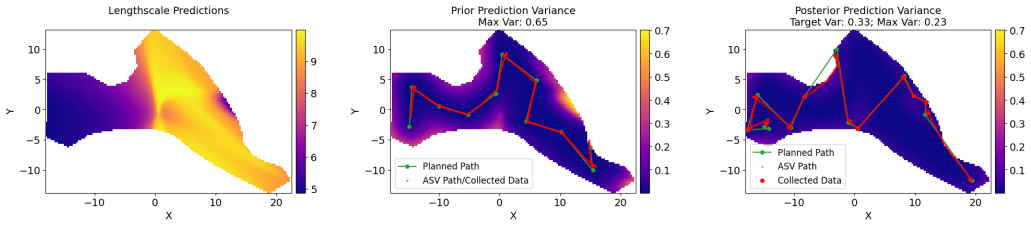
Binary coverage maps obtained by thresholding the GP kernel, which identify the minimal set of locations that must be visited to reduce posterior variance below the target everywhere.
If this is right
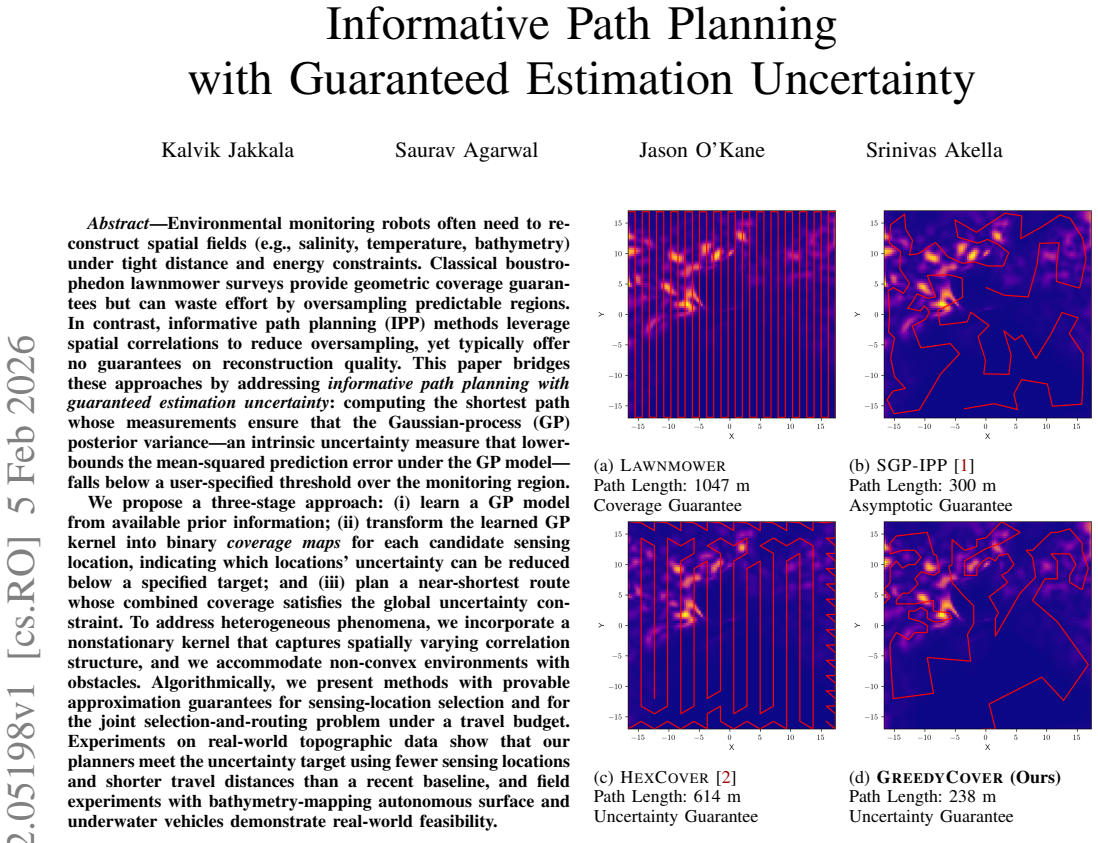
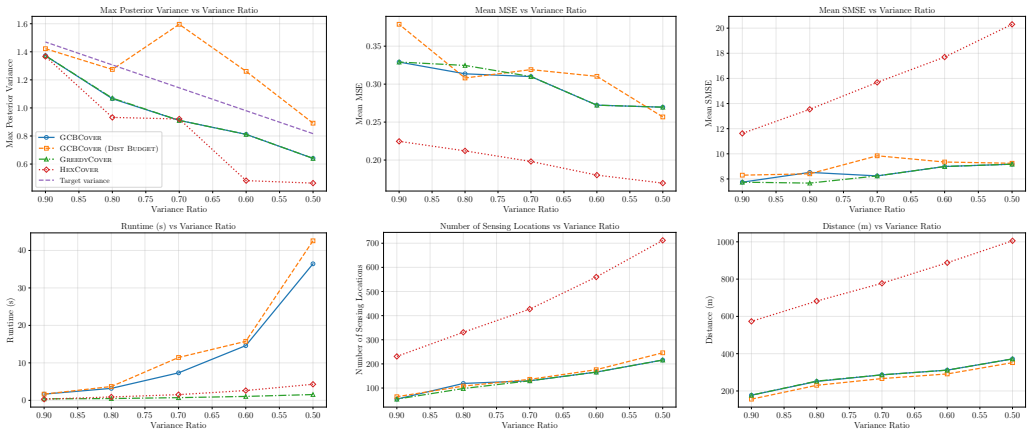
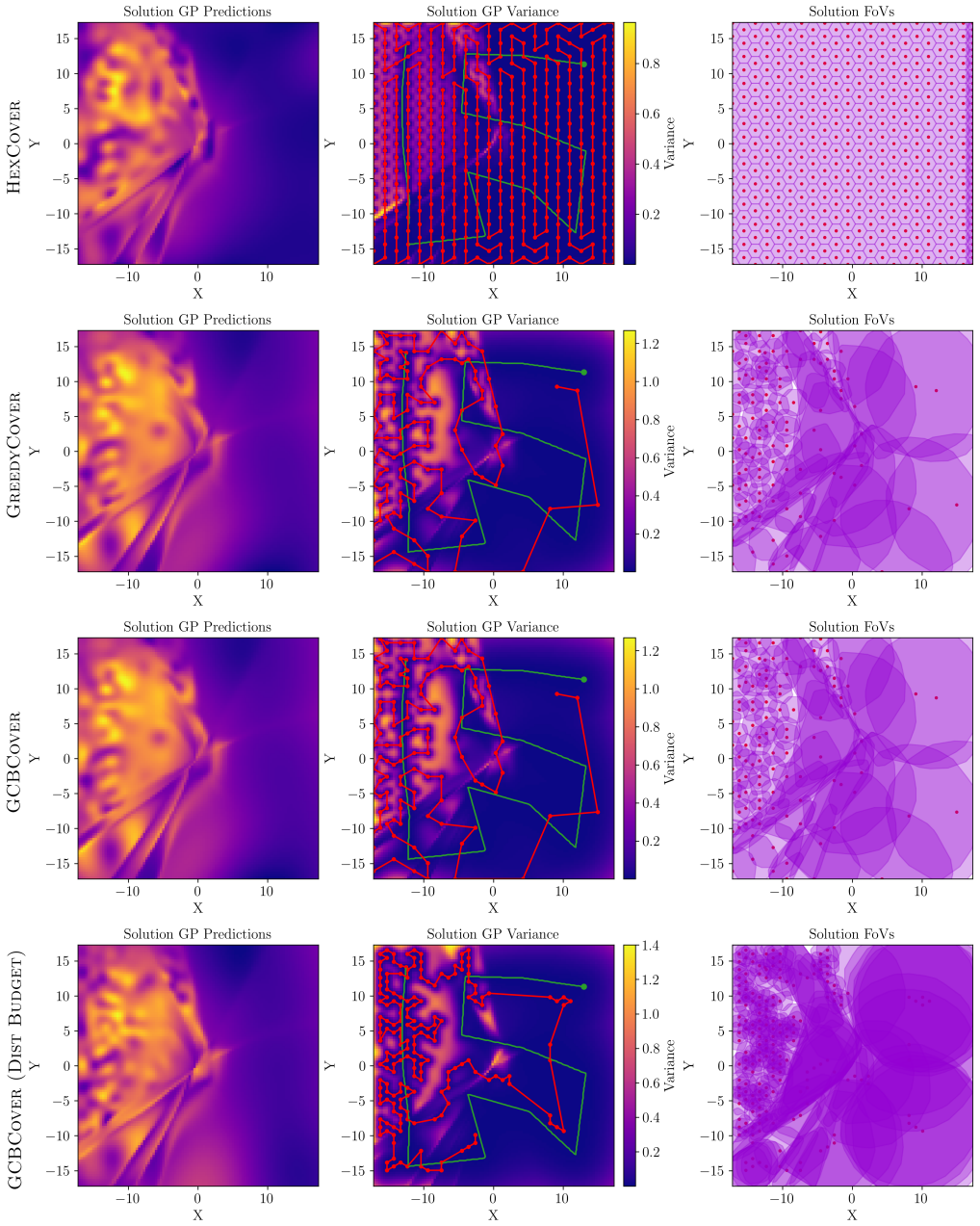
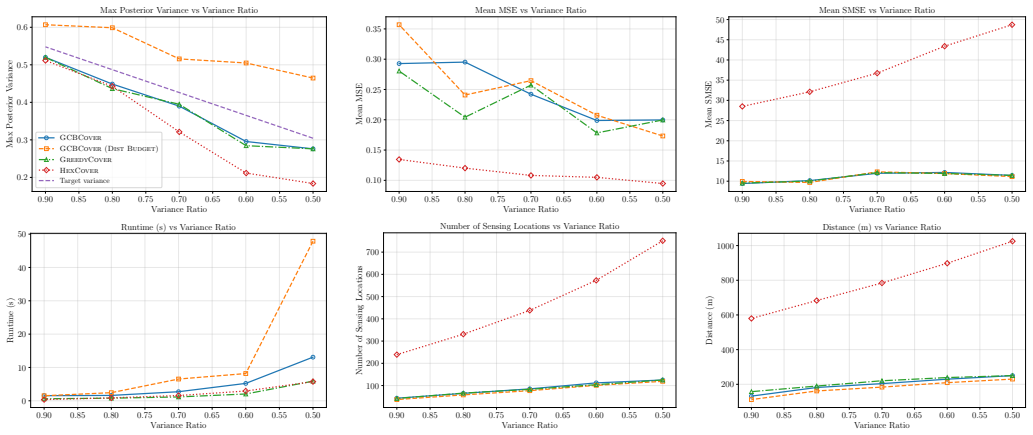
- The planner meets any chosen uncertainty threshold using fewer sensing locations and shorter travel distance than boustrophedon coverage.
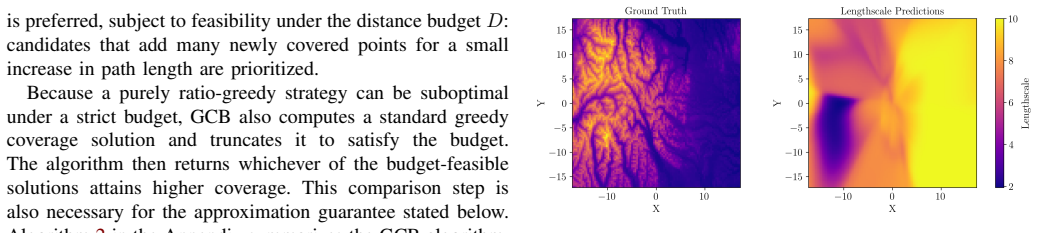
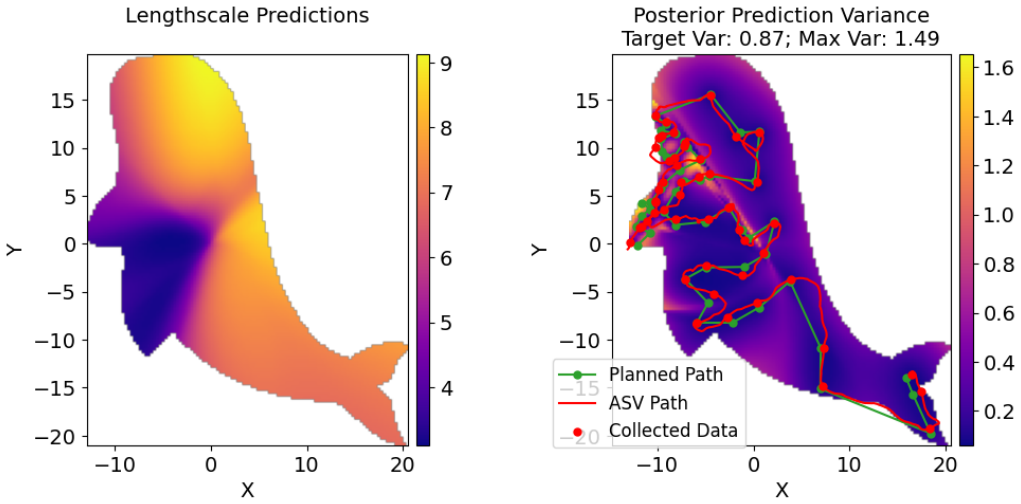
- Non-stationary kernels allow the same guarantee in heterogeneous fields whose correlation structure changes across space.
- Near-optimal approximation ratios hold for the sensing-location subproblem and the full budgeted routing problem.
- The method remains feasible in non-convex workspaces that contain obstacles.
Where Pith is reading between the lines
- The coverage-map reduction could be reused with other uncertainty measures or sensor models that admit similar monotonicity properties.
- Repeated deployments could close the loop by updating the GP with new measurements and replanning the next cycle with lower uncertainty.
- The same map-based abstraction might extend to time-varying fields by treating the coverage requirement as a space-time volume constraint.
Load-bearing premise
The Gaussian process fitted to prior observations must correctly represent the true spatial correlations of the field, so that its posterior variance actually bounds the real prediction error.
What would settle it
Run the planned path in a field whose correlation lengths or variances differ markedly from the training data and check whether the observed mean-squared prediction error at unsampled locations exceeds the planned GP variance bound.
Figures

read the original abstract
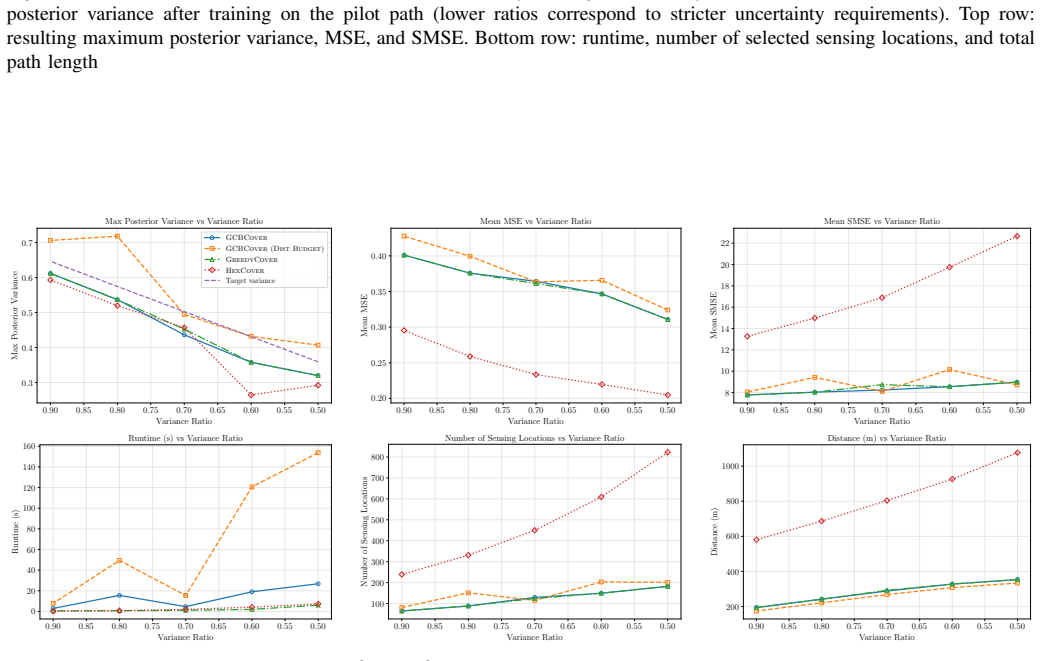
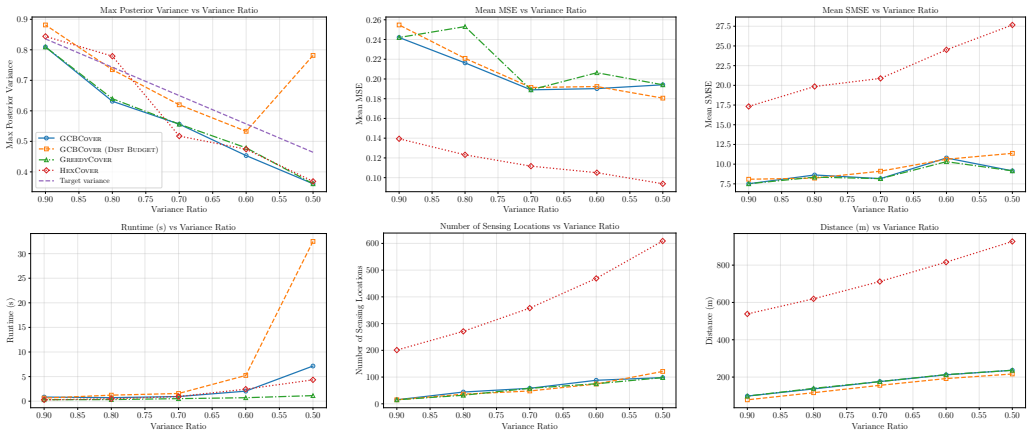
Environmental monitoring robots often need to estimate data fields (e.g., salinity, temperature, bathymetry) under tight resource constraints. Classical boustrophedon lawnmower surveys provide geometric coverage guarantees but can waste effort by oversampling predictable regions. In contrast, informative path planning (IPP) methods leverage spatial correlations to reduce oversampling, yet typically offer no guarantees on estimation quality. This paper bridges these approaches by addressing IPP with guaranteed estimation uncertainty in complex environments: computing the shortest path whose measurements ensure that the Gaussian process (GP) posterior variance -- an intrinsic uncertainty measure that lower-bounds the mean-squared prediction error under the GP model -- is upper bounded by a user-specified threshold over the monitoring region. We propose a three-stage approach for efficient environmental monitoring: (i) learning a GP model from prior information; (ii) transforming the GP kernel into binary coverage maps that identify locations where uncertainty can be reduced below a target threshold; and (iii) planning a near-shortest route to satisfy the global uncertainty constraint. Our approach incorporates non-stationary kernels to capture spatially varying correlations in heterogeneous phenomena and accommodates non-convex environments with obstacles. We provide near-optimal approximation guarantees for both sensing-location selection and the joint selection-and-routing problem under a travel budget. Experiments on real-world topographic data demonstrate that our planners achieve uncertainty targets with fewer sensing locations and shorter travel distances than representative baselines. Furthermore, field experiments with autonomous surface and underwater vehicles validate the real-world feasibility of the approach. Our code is available at: www.sgp-tools.com
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to solve informative path planning (IPP) with guaranteed estimation uncertainty by computing the shortest path whose measurements ensure that the Gaussian process (GP) posterior variance is upper-bounded by a user-specified threshold over the entire monitoring region. It proposes a three-stage approach: (i) learning a GP model from prior data, (ii) transforming the GP kernel into binary coverage maps identifying discrete sensing locations that reduce variance below threshold, and (iii) planning a near-shortest route satisfying the global constraint. The method incorporates non-stationary kernels and handles non-convex environments with obstacles, providing near-optimal approximation guarantees for sensing-location selection and the joint selection-and-routing problem. Validation includes experiments on real-world topographic data showing fewer measurements and shorter paths than baselines, plus field experiments with autonomous surface and underwater vehicles; code is released.
Significance. If the continuous-domain guarantees hold, the work meaningfully bridges classical geometric coverage planning and data-driven IPP by delivering practical algorithms with theoretical backing for resource-constrained robots. The use of non-stationary kernels, real-world validation, and open code are notable strengths that would increase impact in robotics and environmental monitoring.
major comments (1)
- The central guarantee rests on the claim that binary coverage maps derived from the GP kernel ensure posterior variance below threshold over the full continuous monitoring region. However, posterior variance is a continuous function of the kernel matrix inverse; ensuring the bound only on a finite discretization does not automatically extend everywhere, particularly for non-stationary kernels with spatially varying correlation lengths. No explicit Lipschitz constant, covering-radius argument, or maximum overshoot bound is provided to relate grid resolution to continuous guarantee, so the approximation guarantees apply strictly to the chosen grid rather than the claimed continuous region.
minor comments (2)
- The abstract states 'near-optimal approximation guarantees' without specifying the ratio or the precise assumptions (e.g., submodularity or matroid constraints) under which they hold; this should be stated explicitly in the introduction or theorem statements.
- Notation for the coverage maps and the mapping from kernel to binary decisions could be clarified with a small example or pseudocode to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the thorough review and valuable feedback. The major comment raises an important point about extending discrete guarantees to the continuous domain, which we address directly below. We are prepared to strengthen the theoretical section accordingly while preserving the practical contributions of the work.
read point-by-point responses
-
Referee: The central guarantee rests on the claim that binary coverage maps derived from the GP kernel ensure posterior variance below threshold over the full continuous monitoring region. However, posterior variance is a continuous function of the kernel matrix inverse; ensuring the bound only on a finite discretization does not automatically extend everywhere, particularly for non-stationary kernels with spatially varying correlation lengths. No explicit Lipschitz constant, covering-radius argument, or maximum overshoot bound is provided to relate grid resolution to continuous guarantee, so the approximation guarantees apply strictly to the chosen grid rather than the claimed continuous region.
Authors: We agree that the manuscript does not explicitly derive a bound relating grid resolution to the continuous-domain guarantee, and this is a valid observation. Our binary coverage maps and approximation guarantees are formally stated with respect to the chosen discretization. In the revised version we will add a dedicated subsection to the theoretical analysis that (i) establishes a Lipschitz constant for the posterior variance function under the assumed kernel class (using the fact that the variance is a continuous and differentiable function of the kernel matrix inverse for standard kernels), (ii) provides a covering-radius argument that bounds the maximum overshoot between grid points, and (iii) shows how to select grid resolution as a function of the desired tolerance and the kernel's length-scale variation. For non-stationary kernels the local Lipschitz constant can be bounded by the supremum of the length-scale gradient over the domain. This will make the continuous guarantee explicit and quantify the discretization error, while the practical algorithm remains unchanged. revision: yes
Circularity Check
No significant circularity; central guarantee computed directly from standard GP posterior variance without reduction to fitted inputs or self-citation chains
full rationale
The derivation proceeds in three explicit stages: (1) fit a GP to prior data using the standard kernel and posterior variance formula, (2) convert that variance into binary coverage maps by direct evaluation of the GP equations at discrete points, and (3) invoke external approximation algorithms for set cover and routing. None of these steps redefines the target uncertainty bound in terms of the path length or coverage map itself, nor does any load-bearing claim rest on a self-citation whose validity is presupposed by the present work. The discretization-to-continuous gap is a potential correctness issue but does not make any equation equivalent to its own input by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- uncertainty threshold
axioms (1)
- domain assumption Gaussian process posterior variance lower-bounds mean-squared prediction error under the model
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
transforming the GP kernel into binary coverage maps that identify locations where uncertainty can be reduced below a target threshold
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leancostAlphaLog_high_calibrated_iff unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Theorem 1 (Minimum Required Prior Covariance) ... |k(c,v)| ≥ sqrt((k(v,v)-σ_tar²)(k(c,c)+σ_n²))
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.