Beyond Collision Avoidance: Multi-Robot Yielding and Spatial Affordance in Emergency Evacuations
Pith reviewed 2026-05-20 17:57 UTC · model grok-4.3
The pith
In confined emergencies, robots that hide in refuge niches to yield space are preferred by people over those that freeze or optimize for shortest paths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
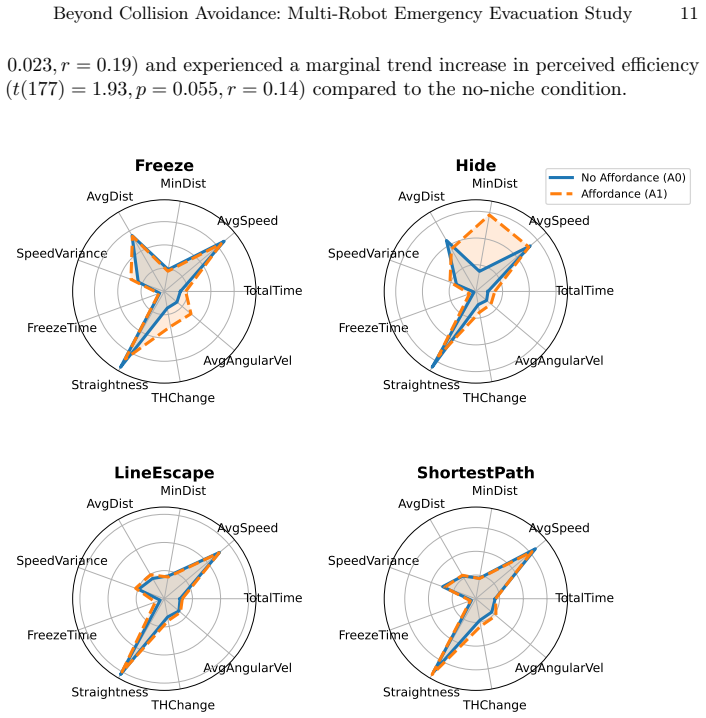
Our results establish a robust preference hierarchy (Hide > LineEscape > Freeze > ShortestPath), demonstrating that proactive space-yielding significantly outperforms freezing and efficiency-first approaches. Crucially, we found that environmental affordances heavily shape cognitive expectations. Actively utilising available niches amplifies the psychological comfort of proactive yielding (Hide). Conversely, failing to use an obvious niche (e.g., executing LineEscape) may trigger Expectation Violation. This is reflected in a drastically increased perceived cognitive delay, despite objectively unimpeded trajectories.
What carries the argument
The preference hierarchy among four yielding strategies (Hide, LineEscape, Freeze, ShortestPath) evaluated in corridors with and without refuge niches, showing how these strategies interact with human spatial expectations and affordances.
If this is right
- Proactive yielding that uses available environmental features leads to greater human comfort than simply stopping or choosing efficient paths.
- Failure to utilize obvious refuge spaces can increase perceived delays even when actual movement is not blocked.
- Experience with robots improves the ability to interpret their social intentions during emergencies.
- Safe human-robot interaction in crises requires navigation that is aware of semantic and environmental context beyond basic trajectory planning.
Where Pith is reading between the lines
- Robot path planning systems could incorporate models of human expectations about space usage in different environments to improve acceptance.
- Testing these strategies in physical settings with real robots and larger groups could reveal how group dynamics affect the observed preferences.
- Designing robots to detect and use affordances like niches might reduce the need for explicit communication of intent.
Load-bearing premise
Responses from participants in a game-based virtual evacuation accurately reflect how people would react to real robots in actual physical emergency situations.
What would settle it
Conducting the same experiment with physical robots in a real corridor and finding that participants rate Freeze or ShortestPath higher than Hide would falsify the preference hierarchy.
Figures





read the original abstract
As mobile service robots increasingly coexist with pedestrians, ensuring passively safe behaviour during confined emergency evacuations is critical. Existing multi-robot yielding strategies often focus solely on collision avoidance and macroscopic flow optimisation, overlooking environmental affordances and human spatial expectations. To bridge the gap between macroscopic theory and micro-level perception, we conducted a game-based virtual evacuation experiment (N=56). We investigated individual psychological responses to four multi-robot yielding strategies (Hide, LineEscape, Freeze, ShortestPath) across confined corridors with and without refuge niches. Our results establish a robust preference hierarchy (Hide > LineEscape > Freeze > ShortestPath), demonstrating that proactive space-yielding significantly outperforms freezing and efficiency-first approaches. Crucially, we found that environmental affordances heavily shape cognitive expectations. Actively utilising available niches amplifies the psychological comfort of proactive yielding (Hide). Conversely, failing to use an obvious niche (e.g., executing LineEscape) may trigger Expectation Violation. This is reflected in a drastically increased perceived cognitive delay, despite objectively unimpeded trajectories. Furthermore, prior robot interaction experience helps users decode complex social intents. Ultimately, this research demonstrates that safe human-robot interaction during emergencies must evolve from pure trajectory optimisation to semantically aware navigation. Future work will extend this framework to investigate complex interactions between robot swarms and pedestrian crowds.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript reports results from a game-based virtual evacuation experiment (N=56) comparing four multi-robot yielding strategies—Hide, LineEscape, Freeze, and ShortestPath—in confined corridors with and without refuge niches. It claims a clear preference hierarchy (Hide > LineEscape > Freeze > ShortestPath), that proactive yielding outperforms freezing and efficiency-focused approaches, and that environmental affordances shape cognitive expectations, with niche utilization amplifying comfort and unused niches triggering expectation violations that increase perceived cognitive delay despite clear paths. Prior robot experience is noted as aiding intent decoding, with the work advocating a shift from trajectory optimization to semantically aware navigation.
Significance. If the empirical hierarchy and affordance effects hold under more realistic conditions, the work would meaningfully advance HRI by showing how spatial niches and proactive yielding can reduce cognitive load in emergencies beyond standard collision avoidance. The virtual experiment supplies concrete preference data that could guide robot behavior design, though its contribution is tempered by the lack of physical validation.
major comments (2)
- [Abstract / Results] Abstract and results description: the stated 'robust preference hierarchy' from the N=56 experiment is asserted without any reported statistical tests, p-values, effect sizes, confidence intervals, or analysis of variance across the with/without-niche conditions, leaving the ordering's reliability and the claim of 'significantly outperforms' unsupported by the provided information.
- [Discussion / Limitations] The central claim that the observed hierarchy and niche effects apply to real multi-robot yielding in physical emergency evacuations rests on untested generalization from the virtual game setting; no discussion of ecological validity, physical risk, embodied robot presence, or time pressure appears, which directly affects whether the preference ordering and expectation-violation findings transfer.
minor comments (2)
- [Methods] Clarify the exact questionnaire items or scales used to measure 'perceived cognitive delay' and 'psychological comfort' so readers can assess how these map to the reported hierarchy.
- [Methods] Expand the description of participant demographics, recruitment, exclusion criteria, and how prior robot interaction experience was quantified and analyzed.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed feedback, which has prompted us to strengthen the statistical reporting and limitations discussion in the manuscript. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract / Results] Abstract and results description: the stated 'robust preference hierarchy' from the N=56 experiment is asserted without any reported statistical tests, p-values, effect sizes, confidence intervals, or analysis of variance across the with/without-niche conditions, leaving the ordering's reliability and the claim of 'significantly outperforms' unsupported by the provided information.
Authors: We appreciate the referee drawing attention to the need for explicit statistical support. The hierarchy reflects aggregated participant preference rankings from the N=56 sample, with the Hide strategy receiving the highest ratings in niche-present conditions. We agree that formal tests are required to substantiate claims of robustness and significant outperformance. In the revised manuscript we have added a repeated-measures ANOVA, pairwise post-hoc comparisons with Bonferroni correction, p-values, partial eta-squared effect sizes, and 95% confidence intervals for the key contrasts between strategies and across niche conditions. These analyses confirm the statistical reliability of the reported ordering. The abstract has been updated to reference the statistical evidence. revision: yes
-
Referee: [Discussion / Limitations] The central claim that the observed hierarchy and niche effects apply to real multi-robot yielding in physical emergency evacuations rests on untested generalization from the virtual game setting; no discussion of ecological validity, physical risk, embodied robot presence, or time pressure appears, which directly affects whether the preference ordering and expectation-violation findings transfer.
Authors: We concur that the manuscript would benefit from a more explicit treatment of ecological validity. Although the study is framed as a virtual experiment and future physical work is mentioned, we acknowledge that dedicated discussion of physical risk, embodied robot presence, and real-world time pressure was limited. The revised Discussion and Limitations sections now include a dedicated paragraph addressing these factors: we note that the absence of physical danger may reduce perceived urgency relative to actual evacuations, that screen-based interaction differs from embodied co-presence, and that the observed expectation-violation effects could be amplified or attenuated under genuine time pressure. We retain the position that the virtual results supply actionable design insights while clearly bounding their generalizability, and we outline concrete steps for physical validation in future studies. revision: yes
Circularity Check
No circularity; central claims derived from new empirical experiment data
full rationale
The paper's core results—a preference hierarchy among yielding strategies and the role of environmental affordances—are obtained directly from a newly conducted game-based virtual evacuation experiment with N=56 participants. No mathematical derivations, fitted parameters, self-citations, or ansatzes are invoked to generate these findings; the claims rest on participant responses collected for this study. This constitutes an independent empirical benchmark external to any prior author work or internal definitions, satisfying the criteria for a self-contained analysis with score 0.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Virtual game-based experiments elicit psychological responses representative of real emergency situations
Reference graph
Works this paper leans on
-
[1]
Applied Sciences14(1), 89 (2023)
Alqobali, R., Alshmrani, M., Alnasser, R., Rashidi, A., Alhmiedat, T., Alia, O.M.: A survey on robot semantic navigation systems for indoor environments. Applied Sciences14(1), 89 (2023). https://doi.org/doi.org/10.3390/app14010089
-
[2]
In: 2021 30th IEEE In- ternational Conference on Robot & Human Interactive Communication (RO-MAN)
Asavanant, C., Umemuro, H.: Personal space violation by a robot: An application of expectation violation theory in human-robot interaction. In: 2021 30th IEEE In- ternational Conference on Robot & Human Interactive Communication (RO-MAN). pp. 1181–1188. IEEE (2021). https://doi.org/10.1109/ro-man50785.2021.9515472
-
[3]
Bahamid, A., Ibrahim, A.M., Ibrahim, A., Zahurin, I.Z., Wahid, A.N.: Intelli- gent robot-assisted evacuation: A review. In: Journal of Physics: Conference Se- ries. vol. 1706, p. 012159. IOP Publishing (2020). https://doi.org/10.1088/1742- 6596/1706/1/012159
-
[4]
Bartneck, C., Kulić, D., Croft, E., Zoghbi, S.: Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. International Journal of Social Robotics1(1), 71–81 (2009). https://doi.org/10.1007/s12369-008-0001-3
-
[5]
In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Bera, A., Randhavane, T., Prinja, R., Manocha, D.: Sociosense: Robot navigation amongst pedestrians with social and psychological constraints. In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 7018–7025. IEEE (2017). https://doi.org/10.1109/IROS.2017.8206628 Beyond Collision Avoidance: Multi-Robot Emergency Evacuatio...
-
[6]
Journal of Language and Social Psychology12(1-2), 30–48 (Mar 1993)
Burgoon, J.K.: Interpersonal Expectations, Expectancy Violations, and Emotional Communication. Journal of Language and Social Psychology12(1-2), 30–48 (Mar 1993). https://doi.org/10.1177/0261927X93121003
-
[7]
Human Communication Research2(2), 131–146 (1976)
Burgoon, J.K., Jones, S.B.: Toward a theory of personal space expectations and their violations. Human Communication Research2(2), 131–146 (1976). https://doi.org/10.1111/j.1468-2958.1976.tb00706.x
-
[8]
In: Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction
Carpinella, C.M., Wyman, A.B., Perez, M.A., Stroessner, S.J.: The robotic social attributes scale (RoSAS) development and validation. In: Proceedings of the 2017 ACM/IEEE International Conference on Human-Robot Interaction. pp. 254–262 (2017). https://doi.org/10.1145/2909824.3020208
-
[9]
Crowd Dynamics, Volume 5: From Human Complexity to Scientific Machine Learning pp
Chatagnon, T., Tordeux, A., Chraibi, M.: Exploring dense crowd dynam- ics: State of the art and emerging paradigms. Crowd Dynamics, Volume 5: From Human Complexity to Scientific Machine Learning pp. 9–36 (2025). https://doi.org/doi.org/10.1007/978-3-032-02221-9_2
-
[10]
Christensen, R.H.B.: ordinal—Regression Models for Ordinal Data (2025),https: //CRAN.R-project.org/package=ordinal, r package version 2025.12-29
work page 2025
-
[11]
In: 2013 8th ACM/IEEE International Conference on Human-Robot Inter- action (HRI)
Dragan, A.D., Lee, K.C., Srinivasa, S.S.: Legibility and predictability of robot motion. In: 2013 8th ACM/IEEE International Conference on Human-Robot Inter- action (HRI). pp. 301–308. IEEE (2013). https://doi.org/10.1109/hri.2013.6483603
-
[12]
Frontiers in Robotics and AI8, 721317 (2022)
Gao, Y., Huang, C.M.: Evaluation of socially-aware robot navigation. Frontiers in Robotics and AI8, 721317 (2022). https://doi.org/10.3389/frobt.2021.721317
-
[13]
Hilldale, USA1(2), 67–82 (1977)
Gibson, J.J.: The theory of affordances. Hilldale, USA1(2), 67–82 (1977). https://doi.org/10.1215/9781478023876-006
-
[14]
Gómez, J.V., Mavridis, N., Garrido, S.: Social path planning: Generic human-robot interaction framework for robotic navigation tasks. In: 2nd Intl. Workshop on Cognitive Robotics Systems: Replicating Human Actions and Activities. pp. 17–18 (2013),https://jvgomez.github.io/files/pubs/IROS2013_workshop.pdf
work page 2013
-
[15]
Hall, E.T., Hall, E.T.: The Hidden Dimension, vol. 609. Anchor (1966). https://doi.org/10.2307/1572461
-
[16]
Hart, S.G., Staveland, L.E.: Development of NASA-TLX (task load index): Results of empirical and theoretical research. In: Advances in Psychology, vol. 52, pp. 139–183. Elsevier (1988). https://doi.org/10.1016/s0166-4115(08)62386-9
-
[17]
Multi-robot task planning under individual and collaborative temporal logic specifications
Hetherington, N.J., Lee, R., Haase, M., Croft, E.A., Van der Loos, H.M.: Mobile robot yielding cues for human-robot spatial interaction. In: 2021 IEEE/RSJ In- ternational Conference on Intelligent Robots and Systems (IROS). pp. 3028–3033. IEEE (2021). https://doi.org/10.1109/iros51168.2021.9636367
-
[18]
A simple sequentially rejective multiple test procedur e
Holm, S.: A simple sequentially rejective multiple test procedure. Scandinavian Journal of Statistics6(2), 65–70 (1979),http://www.jstor.org/stable/4615733
-
[19]
Hori, M.: Introduction to Computational Earthquake Engineering. World Scientific (2011). https://doi.org/10.1142/9781848163997
-
[20]
Robotics and Autonomous Systems66, 86–103 (2015)
Kostavelis, I., Gasteratos, A.: Semantic mapping for mobile robotics tasks: A survey. Robotics and Autonomous Systems66, 86–103 (2015). https://doi.org/doi.org/10.1016/j.robot.2014.12.006
-
[21]
Artificial Life and Robotics25(4), 529–536 (2020)
Koyama, S., Inoue, D., Okada, A., Yoshida, H.: Separation of pedestrian counter flows with an array of obstacles. Artificial Life and Robotics25(4), 529–536 (2020). https://doi.org/10.1007/s10015-020-00648-w
-
[22]
International Journal of Social Robotics5(2), 291–308 (2013)
Leite, I., Martinho, C., Paiva, A.: Social robots for long-term interaction: A survey. International Journal of Social Robotics5(2), 291–308 (2013). https://doi.org/10.1007/s12369-013-0178-y 18 N. Zhou et al
-
[23]
Robotics and Autonomous Systems145, 103837 (2021)
Möller, R., Furnari, A., Battiato, S., Härmä, A., Farinella, G.M.: A survey on human-aware robot navigation. Robotics and Autonomous Systems145, 103837 (2021). https://doi.org/10.1016/j.robot.2021.103837
-
[24]
In2021 30th IEEE international conference on robot & human interactive communication (RO-MAN)
Nayyar, M., Wagner, A.R.: Effective robot evacuation strategies in emergencies. In: 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN). pp. 1–6. IEEE (2019). https://doi.org/10.1109/ro- man46459.2019.8956307
work page doi:10.1109/ro- 2019
-
[25]
In: 2016 11th ACM/IEEE Interna- tional Conference on Human-Robot Interaction (HRI)
Robinette, P., Li, W., Allen, R., Howard, A.M., Wagner, A.R.: Overtrust of robots in emergency evacuation scenarios. In: 2016 11th ACM/IEEE Interna- tional Conference on Human-Robot Interaction (HRI). pp. 101–108. IEEE (2016). https://doi.org/10.1109/hri.2016.7451740
-
[26]
Physical Review Fluids7(3), 034302 (2022)
Seguin, A.: Forces on an intruder combining translation and rota- tion in granular media. Physical Review Fluids7(3), 034302 (2022). https://doi.org/10.1103/PhysRevFluids.7.034302
-
[27]
In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems
Trautman, P., Krause, A.: Unfreezing the robot: Navigation in dense, interacting crowds. In: 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 797–803. IEEE (2010). https://doi.org/10.1109/iros.2010.5654369
-
[28]
Physica A: Statistical Mechanics and its Applications562, 125369 (2021)
Wang, X., Liu, Z., Wang, J., Loughney, S., Yang, Z., Gao, X.: Experimental study on individual walking speed during emergency evacuation with the influence of ship motion. Physica A: Statistical Mechanics and its Applications562, 125369 (2021). https://doi.org/10.1016/j.physa.2020.125369
-
[29]
Webb, N., Huang, Z., Milivojevic, S., Baber, C., Hunt, E.R.: When robots say no: Temporal trust recovery through explanation. In: International Conference on Social Robotics. pp. 424–436. Springer (2025). https://doi.org/doi.org/10.1007/978- 981-95-2379-5_29
-
[30]
Australian Journal of Scientific Research Series A: Physical Sciences 2(2), 149–168 (1949)
Williams, E.J.: Experimental designs balanced for the estimation of residual effects of treatments. Australian Journal of Scientific Research Series A: Physical Sciences 2(2), 149–168 (1949). https://doi.org/10.1071/ch9490149
-
[31]
The aligned rank transform for nonparametric factorial analyses us- ing only anova procedures,
Wobbrock, J.O., Findlater, L., Gergle, D., Higgins, J.J.: The aligned rank transform for nonparametric factorial analyses using only anova procedures. In: Proceedings of the SIGCHI Conference on Human Factors in Computing Systems. p. 143–146. CHI ’11, Association for Computing Machinery, New York, NY, USA (2011). https://doi.org/10.1145/1978942.1978963
-
[32]
https://doi.org/10.1038/nrn1411
Wolfe, J.M., Horowitz, T.S.: What attributes guide the deployment of visual attention and how do they do it? Nature Reviews Neuroscience5(6), 495–501 (2004). https://doi.org/10.1038/nrn1411
-
[33]
Journal of Statistical Mechanics: Theory and Experiment2022(2), 023407 (2022)
Xu, H., Zhang, J., Song, W., Hu, Y., Li, X., Ren, X., Yang, L., Yu, H., Jiang, K.: The effect of moving obstacle on regulation of pedestrian flow in a single exit room. Journal of Statistical Mechanics: Theory and Experiment2022(2), 023407 (2022). https://doi.org/10.1088/1742-5468/ac4c3f
-
[34]
ACM Transactions on Human-Robot Interaction14(3), 1–27 (2025)
Zhang, Q., Tsoi, N., Nagib, M., Choi, B., Tan, J., Chiang, H.T.L., Vázquez, M.: Predicting human perceptions of robot performance during navigation tasks. ACM Transactions on Human-Robot Interaction14(3), 1–27 (2025). https://doi.org/10.1145/3719020
-
[35]
In: 2022 IEEE 61st Conference on Decision and Control (CDC)
Zheng, T., Yuan, Z., Nayyar, M., Wagner, A.R., Zhu, M., Lin, H.: Multi-robot- assisted human crowd evacuation using navigation velocity fields. In: 2022 IEEE 61st Conference on Decision and Control (CDC). pp. 2061–2066. IEEE (2022). https://doi.org/10.1109/CDC51059.2022.9993368
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.