Human-Guided Co-Manipulation of Carbon Fiber Plies
Pith reviewed 2026-06-27 09:46 UTC · model grok-4.3
The pith
Multimodal control fusing speech, vision wrist tracking, and force compliance enables intuitive human-robot co-manipulation of deformable carbon fiber plies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In controlled tests each individual control channel for co-manipulation of carbon fiber plies shows clear limitations, so that a multimodal system combining speech commands, vision-based wrist tracking, and force sensing with compliant robot behavior supplies the most complete and intuitive operator interface.
What carries the argument
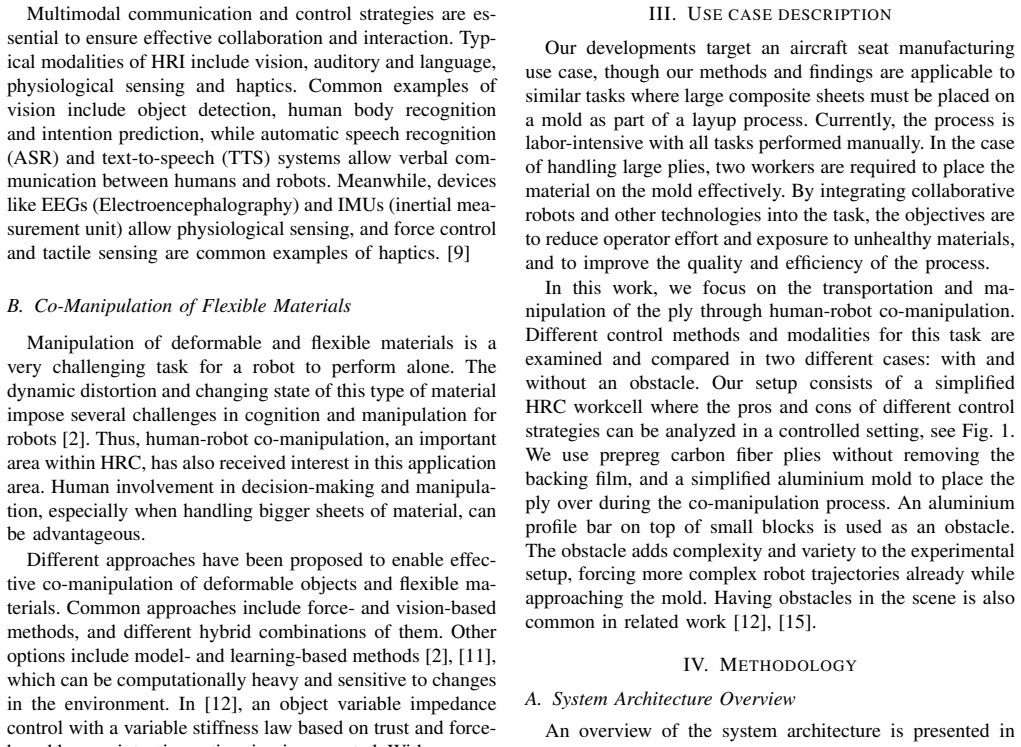
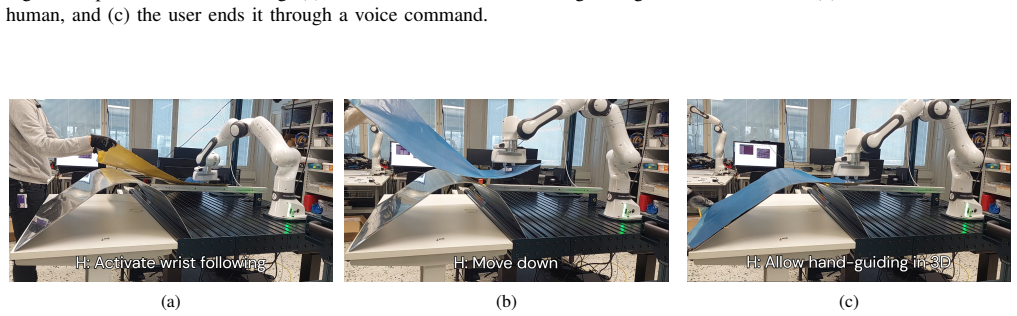
Multimodal control interface that fuses speech for discrete commands, vision for wrist-position guidance, and force-compliant feedback for continuous physical direction of the robot.
If this is right
- Operators can issue high-level verbal instructions while using light physical guidance for fine positioning.
- Compliant force control lets the robot follow ply deformations without requiring constant high effort from the human.
- Vision tracking supplies position references without forcing the operator to maintain continuous contact.
- The hybrid approach reduces the need to choose between fully automated or fully manual handling of flexible parts.
Where Pith is reading between the lines
- The same multimodal pattern could apply to other deformable sheet materials in aerospace or automotive layup processes.
- Quantitative metrics on error rates and cycle times would be needed to confirm the claimed superiority over single channels.
- Integration with existing robot cells might lower repetitive-strain injuries without requiring new hardware for every task.
Load-bearing premise
Advantages measured in a controlled laboratory setting will carry over to real production lines without additional validation or quantitative head-to-head comparisons.
What would settle it
A side-by-side trial in an actual manufacturing cell that records task time, placement accuracy, and operator fatigue for the multimodal system versus each single modality alone.
Figures
read the original abstract
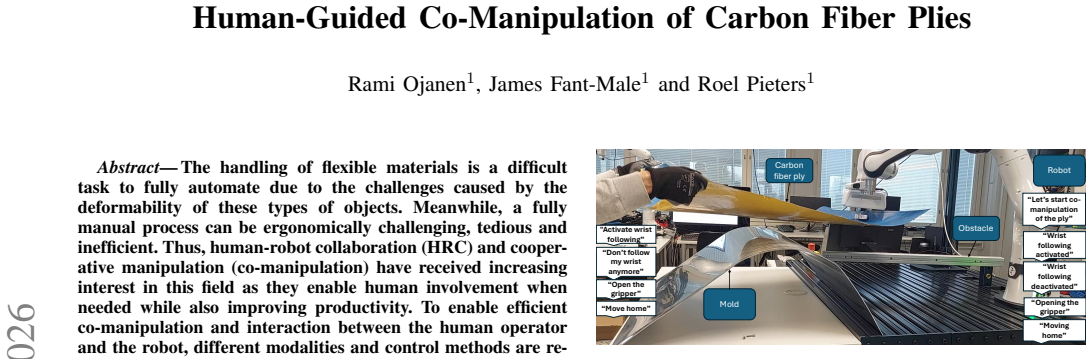
The handling of flexible materials is a difficult task to fully automate due to the challenges caused by the deformability of these types of objects. Meanwhile, a fully manual process can be ergonomically challenging, tedious and inefficient. Thus, human-robot collaboration (HRC) and cooperative manipulation (co-manipulation) have received increasing interest in this field as they enable human involvement when needed while also improving productivity. To enable efficient co-manipulation and interaction between the human operator and the robot, different modalities and control methods are required. In this paper, we present and examine different control methods for co-manipulation of carbon fiber plies, evaluating the pros and cons of each method in a controlled setting. We propose that a multimodal combination of speech commands, wrist-tracking through vision, and force with compliant control would provide the best solution for complete and intuitive control of the task.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript examines control modalities for human-robot co-manipulation of deformable carbon fiber plies, describing speech commands, vision-based wrist tracking, and force-compliant control. It reports pros/cons of each modality from evaluations in a controlled setting and proposes that their multimodal combination would yield the most complete and intuitive task control.
Significance. The topic addresses a practical manufacturing challenge where full automation is difficult and manual handling is ergonomically costly. Cataloging modality trade-offs is useful, but the central proposal of multimodal superiority has no reported implementation or metrics, limiting immediate applicability. If future work supplies quantitative validation, the contribution could inform HRC design for flexible materials.
major comments (2)
- [Abstract] Abstract: the assertion that 'a multimodal combination of speech commands, wrist-tracking through vision, and force with compliant control would provide the best solution' is not supported by any data; the text evaluates modalities individually but contains no implementation, user study, task-time measurements, error rates, or cognitive-load metrics for the integrated controller.
- [Evaluation sections] Evaluation sections: the pros/cons of individual modalities are presented without description of the controlled setting (participant count, trial protocol, statistical tests, or raw data), so the listed trade-offs cannot be assessed for robustness or used to justify the additive-benefit assumption underlying the multimodal proposal.
minor comments (1)
- Notation for the three modalities is introduced inconsistently across the text; a single table summarizing each modality's sensors, control law, and reported pros/cons would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important points regarding the strength of our claims and the level of detail in the evaluations. We address each major comment below and will make corresponding revisions to improve clarity and rigor.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'a multimodal combination of speech commands, wrist-tracking through vision, and force with compliant control would provide the best solution' is not supported by any data; the text evaluates modalities individually but contains no implementation, user study, task-time measurements, error rates, or cognitive-load metrics for the integrated controller.
Authors: We agree that the multimodal combination is proposed on the basis of the individual modality evaluations rather than direct testing of an integrated system. The manuscript frames this as a proposal informed by observed trade-offs, not as an empirically validated result. We will revise the abstract to explicitly characterize the multimodal approach as a hypothesis for future work, removing any implication that it has been implemented or measured in the current study. revision: yes
-
Referee: [Evaluation sections] Evaluation sections: the pros/cons of individual modalities are presented without description of the controlled setting (participant count, trial protocol, statistical tests, or raw data), so the listed trade-offs cannot be assessed for robustness or used to justify the additive-benefit assumption underlying the multimodal proposal.
Authors: The evaluations occurred in a controlled laboratory setting, yet we acknowledge that the manuscript lacks sufficient detail on participant numbers, trial protocols, statistical methods, or data summaries. This limits readers' ability to assess the reported trade-offs. We will expand the evaluation sections to include these elements, which will also strengthen the justification for proposing the multimodal combination as future work. revision: yes
Circularity Check
No circularity; empirical proposal with no derivation or fitted inputs
full rationale
The manuscript evaluates separate control modalities in a controlled setting and proposes a multimodal combination based on listed pros/cons. No equations, parameters, predictions, or self-citations appear in the provided text. The central claim is an untested empirical suggestion rather than any reduction of a result to its own inputs by construction. This matches the default case of a self-contained empirical paper with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Automated material handling in composite manufacturing using pick-and-place systems – a review,
A. Bj ¨ornsson, M. Jonsson, and K. Johansen, “Automated material handling in composite manufacturing using pick-and-place systems – a review,”Robotics and Computer-Integrated Manufacturing, vol. 51, pp. 222–229, 2018
2018
-
[2]
On deformable ob- ject handling: Model-based motion planning for human-robot co- manipulation,
S. Makris, E. Kampourakis, and D. Andronas, “On deformable ob- ject handling: Model-based motion planning for human-robot co- manipulation,”CIRP Annals, vol. 71, no. 1, pp. 29–32, 2022
2022
-
[3]
Automated planning for robotic layup of composite prepreg,
R. K. Malhan, A. V . Shembekar, A. M. Kabir, P. M. Bhatt, B. Shah, S. Zanio, S. Nutt, and S. K. Gupta, “Automated planning for robotic layup of composite prepreg,”Robotics and Computer-Integrated Man- ufacturing, vol. 67, pp. 1–27, 2021
2021
-
[4]
Human-robot co-transport of flexible materials using deformation constraints,
A. Bonci, A. Di Biase, S. Longhi, and R. Kermenov, “Human-robot co-transport of flexible materials using deformation constraints,” in 29th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), 2024, pp. 1–7
2024
-
[5]
Collaborative human-robot manipulation of highly deformable materials,
D. Kruse, R. J. Radke, and J. T. Wen, “Collaborative human-robot manipulation of highly deformable materials,” inIEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 3782– 3787
2015
-
[6]
Towards robust human-robot mobile co-manipulation for tasks involving the handling of non-rigid materials using sensor-fused force-torque, and skeleton tracking data,
D. De Schepper, B. Moyaers, G. Schouterden, K. Kellens, and E. De- meester, “Towards robust human-robot mobile co-manipulation for tasks involving the handling of non-rigid materials using sensor-fused force-torque, and skeleton tracking data,”Procedia CIRP, vol. 97, pp. 325–330, 2021
2021
-
[7]
Toward human- centric smart manufacturing: A human-cyber-physical systems (HCPS) perspective,
B. Wang, P. Zheng, Y . Yin, A. Shih, and L. Wang, “Toward human- centric smart manufacturing: A human-cyber-physical systems (HCPS) perspective,”Journal of Manufacturing Systems, vol. 63, pp. 471–490, 2022
2022
-
[8]
Challenges and opportunities in human robot collaboration context of Industry 4.0 - a state of the art review,
A. K. Inkulu, M. R. Bahubalendruni, A. Dara, and S. K., “Challenges and opportunities in human robot collaboration context of Industry 4.0 - a state of the art review,”Industrial Robot: the international journal of robotics research and application, vol. 49, no. 2, pp. 226–239, 2022
2022
-
[9]
Multimodal human–robot in- teraction for human-centric smart manufacturing: A survey,
T. Wang, P. Zheng, S. Li, and L. Wang, “Multimodal human–robot in- teraction for human-centric smart manufacturing: A survey,”Advanced Intelligent Systems, vol. 6, no. 3, pp. 1–29, 2024
2024
-
[10]
Ap- plication of social robots in healthcare: Review on characteristics, requirements, technical solutions,
L. Ragno, A. Borboni, F. Vannetti, C. Amici, and N. Cusano, “Ap- plication of social robots in healthcare: Review on characteristics, requirements, technical solutions,”Sensors, vol. 23, no. 15, p. 6820, 2023
2023
-
[11]
3-D deformable object manipulation using deep neural networks,
Z. Hu, T. Han, P. Sun, J. Pan, and D. Manocha, “3-D deformable object manipulation using deep neural networks,”IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4255–4261, 2019
2019
-
[12]
Trust-based variable impedance control of human–robot cooperative manipulation,
Z. Liao and Y . Wang, “Trust-based variable impedance control of human–robot cooperative manipulation,”Robotics and Computer- Integrated Manufacturing, vol. 88, p. 102730, 2024
2024
-
[13]
Depth image- based deformation estimation of deformable objects for collaborative mobile transportation,
G. Nicola, S. Mutti, E. Villagrossi, and N. Pedrocchi, “Depth image- based deformation estimation of deformable objects for collaborative mobile transportation,” in32nd IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2023, pp. 2658–2664
2023
-
[14]
A human-guided approach for garment manipulation tasks by using real-time body tracking and impedance control,
D. Chen, Z. Liao, A. E. Petrilli-Barcel ´o, J. V . S. Luces, and Y . Hirata, “A human-guided approach for garment manipulation tasks by using real-time body tracking and impedance control,” inInternational Conference on Advanced Robotics and Mechatronics (ICARM), 2024, pp. 25–30
2024
-
[15]
Effi- cient human–robot collaborative manipulation of planar deformable objects,
E. Villagrossi, P. Franceschi, G. Nicola, and N. Pedrocchi, “Effi- cient human–robot collaborative manipulation of planar deformable objects,”Journal of Manufacturing Systems, vol. 83, pp. 963–975, 2025
2025
-
[16]
Reducing the barrier to entry of complex robotic software: A MoveIt! case study,
D. Coleman, I. A. S ¸ucan, S. Chitta, and N. Correll, “Reducing the barrier to entry of complex robotic software: A MoveIt! case study,” Journal of Software Engineering for Robotics, vol. 5, no. 1, pp. 3–16, 2014
2014
-
[17]
A C++ implementation of a Cartesian impedance controller for robotic manipulators,
M. Mayr and J. M. Salt-Ducaju, “A C++ implementation of a Cartesian impedance controller for robotic manipulators,”Journal of Open Source Software JOSS, vol. 9, no. 93, pp. 5194–5199, 2024
2024
-
[18]
Ultralytics yolo11,
G. Jocher and J. Qiu, “Ultralytics yolo11,” 2024. [Online]. Available: https://github.com/ultralytics/ultralytics
2024
-
[19]
tf: The transform library,
T. Foote, “tf: The transform library,” inIEEE Conference on Tech- nologies for Practical Robot Applications (TePRA), 2013, pp. 1–6
2013
-
[20]
moveit servo: Real-time manipulator Cartesian and joint servoing,
B. O’Neil, A. Zelenak, B. Anderson, A. R ¨ossler, T. Weaver, and A. Pettinger, “moveit servo: Real-time manipulator Cartesian and joint servoing,” https://index.ros.org/p/moveit servo/, 2025, accessed: 2025- 08-16
2025
-
[21]
Edgevui,
Creoir, “Edgevui,” https://creoir.com/edgevui, 2025, accessed: 2025- 08-15
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.