Depth-Semantic Alignment and Affinity-Guided Fusion for Structured Radar Point Cloud Generation
Pith reviewed 2026-06-26 05:21 UTC · model grok-4.3
The pith
A vision-radar fusion method aligns image semantics with radar depths to generate denser, structured point clouds.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
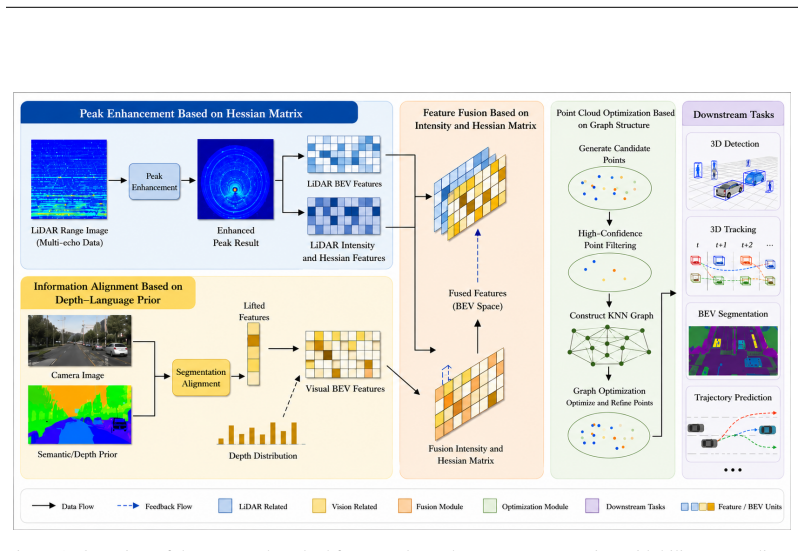
The central claim is that depth-semantic alignment combined with affinity-guided fusion imposes image-derived structural constraints on radar points, achieves spatial correspondence, and supports sparse completion to yield point clouds that raise detection accuracy and robustness in complex environments.
What carries the argument
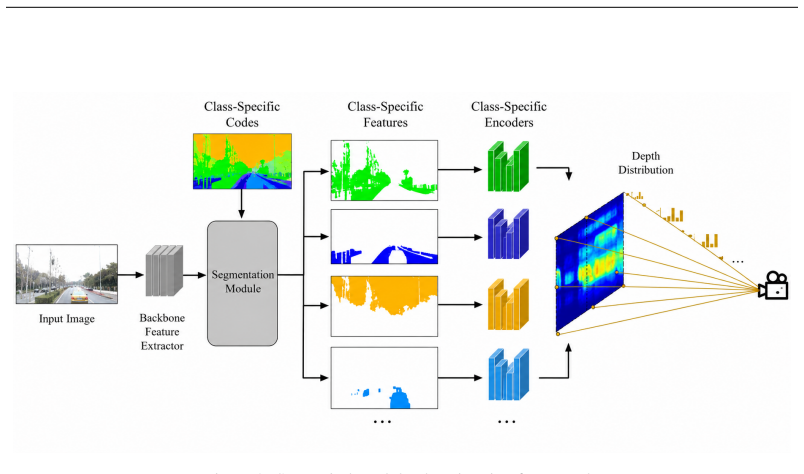
Depth-semantic alignment and affinity-guided fusion, which matches radar depths to image semantic labels to enforce structure and direct the fusion of the two modalities.
If this is right
- Radar point clouds gain density and recover missing geometric structures.
- Downstream object detection models record higher accuracy on the refined clouds.
- Perception systems become more robust when operating in complex or adverse scenes.
- The same pipeline supplies a concrete route to multisensor point cloud generation.
Where Pith is reading between the lines
- The same alignment principle could be tested on other radar-camera pairings or extended to thermal imagery.
- If the quality gains hold across different radar hardware, system designers might reduce reliance on denser but costlier sensors.
- Real-time versions of the fusion step could be evaluated for onboard autonomous driving pipelines.
- Failure modes in low-light or heavy rain would reveal whether semantic cues remain reliable under the conditions radar is meant to handle.
Load-bearing premise
Image semantic information can be leveraged to impose structural constraints and achieve spatial alignment for radar point clouds.
What would settle it
Object detection experiments that compare performance on raw radar point clouds versus the generated clouds and find no statistically significant accuracy or robustness gain would falsify the central claim.
Figures
read the original abstract
Point clouds are an important carrier of three-dimensional spatial information, and their quality directly affects the performance of downstream perception tasks such as object detection and tracking. However, millimeter-wave radar point clouds are typically sparse, noisy, and structurally incomplete. To address these limitations, this paper proposes a multimodal point cloud generation method based on vision-radar fusion. The proposed method leverages image semantic information to impose structural constraints and achieve spatial alignment for radar point clouds, while incorporating a sparse completion strategy to enhance point density and recover missing structures. The generated point clouds are further evaluated in object detection and tracking tasks. Experimental results demonstrate that the proposed method effectively improves point cloud quality and enhances the detection accuracy and robustness of perception models in complex environments, providing a practical solution for multisensor point cloud generation and intelligent perception systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a multimodal point cloud generation method based on vision-radar fusion. It uses image semantic information to impose structural constraints and achieve spatial alignment for radar point clouds, incorporates a sparse completion strategy to enhance point density and recover missing structures, and evaluates the generated point clouds in object detection and tracking tasks. The authors claim that this approach improves point cloud quality and enhances the detection accuracy and robustness of perception models in complex environments.
Significance. If the experimental claims are substantiated, the work could offer a practical solution for generating denser and more structured radar point clouds, which is valuable for improving perception in autonomous systems operating in challenging conditions. The use of semantic information from images for alignment is a plausible approach in the field of sensor fusion.
major comments (1)
- Abstract: The abstract asserts that 'Experimental results demonstrate that the proposed method effectively improves point cloud quality and enhances the detection accuracy and robustness of perception models in complex environments' yet the manuscript provides no quantitative results, error bars, baselines, tables, figures, or derivations to support this claim. This is a load-bearing issue for the central contribution as the effectiveness cannot be evaluated.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive comments. We address the major concern regarding the lack of quantitative support for the claims in the abstract.
read point-by-point responses
-
Referee: Abstract: The abstract asserts that 'Experimental results demonstrate that the proposed method effectively improves point cloud quality and enhances the detection accuracy and robustness of perception models in complex environments' yet the manuscript provides no quantitative results, error bars, baselines, tables, figures, or derivations to support this claim. This is a load-bearing issue for the central contribution as the effectiveness cannot be evaluated.
Authors: We acknowledge the referee's observation. The submitted manuscript indeed focuses on the method description in the provided sections, and the experimental validation with quantitative results was not included in the initial submission. We will revise the manuscript to incorporate comprehensive experimental results, including quantitative metrics for point cloud quality, object detection accuracy with baselines and comparisons, tracking performance, tables, figures, and error bars where appropriate to fully support the claims made in the abstract. revision: yes
Circularity Check
No circularity; method is empirical architecture with experimental validation
full rationale
The paper describes a multimodal fusion architecture for radar point cloud densification that uses image semantics for alignment and sparse completion. No derivation chain, fitted parameters renamed as predictions, or self-citation load-bearing steps are present. Claims rest on downstream detection/tracking experiments rather than any self-referential math or uniqueness theorems. The abstract and method framing introduce the approach directly without reducing any result to its own inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
IEEE Transactions on Intelligent Transportation Systems , volume=
MSSF: A 4D Radar and Camera Fusion Framework With Multi-Stage Sampling for 3D Object Detection in Autonomous Driving , author=. IEEE Transactions on Intelligent Transportation Systems , volume=
-
[2]
IEEE Communications Surveys & Tutorials , volume=
Multi-modal fusion sensing: A comprehensive review of millimeter-wave radar and its integration with other modalities , author=. IEEE Communications Surveys & Tutorials , volume=. 2024 , publisher=
2024
-
[3]
IEEE Sensors Journal , volume=
3-D object detection for multiframe 4-D automotive millimeter-wave radar point cloud , author=. IEEE Sensors Journal , volume=. 2022 , publisher=
2022
-
[4]
arXiv preprint arXiv:2306.04242 , year=
4D millimeter-wave radar in autonomous driving: A survey , author=. arXiv preprint arXiv:2306.04242 , year=
-
[5]
arXiv e-prints , pages=
4D mmWave radar in adverse environments for autonomous driving: A survey , author=. arXiv e-prints , pages=
-
[6]
Remote Sensing , volume=
A point cloud improvement method for high-resolution 4D mmWave radar imagery , author=. Remote Sensing , volume=. 2024 , publisher=
2024
-
[7]
IEEE Robotics and Automation Letters , year=
Diffusion-based mmwave radar point cloud enhancement driven by range images , author=. IEEE Robotics and Automation Letters , year=
-
[8]
Computer Modeling in Engineering & Sciences , volume=
Advanced signal processing and modeling techniques for automotive radar: challenges and innovations in ADAS applications , author=. Computer Modeling in Engineering & Sciences , volume=. 2025 , publisher=
2025
-
[9]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Enhancing mmwave radar point cloud via visual-inertial supervision , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[10]
Information Fusion , pages=
A review on multi-sensor data fusion for wearable health monitoring , author=. Information Fusion , pages=. 2026 , publisher=
2026
-
[11]
Journal of Computing in Civil Engineering , volume=
BrIMs-Based 3D Semantic Segmentation of Bridge Components Leveraging Multisensor Fusion , author=. Journal of Computing in Civil Engineering , volume=. 2026 , publisher=
2026
-
[12]
Computers , volume=
Survey on monocular metric depth estimation , author=. Computers , volume=. 2025 , publisher=
2025
-
[13]
Results in Engineering , volume=
A systematic review of monocular depth estimation for autonomous driving: Methods and dataset benchmarking , author=. Results in Engineering , volume=. 2025 , publisher=
2025
-
[14]
Neurocomputing , volume=
Deep learning for monocular depth estimation: A review , author=. Neurocomputing , volume=. 2021 , publisher=
2021
-
[15]
Science China Technological Sciences , volume=
Monocular depth estimation based on deep learning: An overview , author=. Science China Technological Sciences , volume=. 2020 , publisher=
2020
-
[16]
IEEE Access , year=
SN360: semantic and surface normal cascaded multi-task 360 monocular depth estimation , author=. IEEE Access , year=
-
[17]
Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
Scalable autoregressive monocular depth estimation , author=. Proceedings of the Computer Vision and Pattern Recognition Conference , pages=
-
[18]
Neurocomputing , volume=
Transformer-based monocular depth estimation with hybrid attention fusion and progressive regression , author=. Neurocomputing , volume=. 2025 , publisher=
2025
-
[19]
Image Analysis and Stereology , volume=
TFDepth: self-supervised monocular depth estimation with multi-scale selective transformer feature fusion , author=. Image Analysis and Stereology , volume=
-
[20]
International Journal of Computer Vision , volume=
A survey on deep stereo matching in the twenties , author=. International Journal of Computer Vision , volume=. 2025 , publisher=
2025
-
[21]
Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies , volume=
3D point cloud generation with millimeter-wave radar , author=. Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies , volume=. 2020 , publisher=
2020
-
[22]
2020 German Microwave Conference (GeMiC) , pages=
Spectrum-based single-snapshot super-resolution direction-of-arrival estimation using deep learning , author=. 2020 German Microwave Conference (GeMiC) , pages=. 2020 , organization=
2020
-
[23]
IEEE Transactions on Image Processing , volume=
Dream-pcd: Deep reconstruction and enhancement of mmwave radar pointcloud , author=. IEEE Transactions on Image Processing , volume=. 2024 , publisher=
2024
-
[24]
Information Fusion , volume=
mm-CasGAN: A cascaded adversarial neural framework for mmWave radar point cloud enhancement , author=. Information Fusion , volume=. 2024 , publisher=
2024
-
[25]
Engineering Research Express , volume=
Indoor personnel detection and tracking of millimeter-wave radar based on improved DBSCAN algorithm , author=. Engineering Research Express , volume=. 2025 , publisher=
2025
-
[26]
Advances in Neural Information Processing Systems , volume=
Milipoint: A point cloud dataset for mmwave radar , author=. Advances in Neural Information Processing Systems , volume=
-
[27]
Sensor Array and Multichannel Signal Processing Workshop Proceedings, 2002 , pages=
High-resolution signal processing for a switch antenna array FMCW radar with a single channel receiver , author=. Sensor Array and Multichannel Signal Processing Workshop Proceedings, 2002 , pages=. 2002 , organization=
2002
-
[28]
Electronics , volume=
Multi-input deep learning based FMCW radar signal classification , author=. Electronics , volume=. 2021 , publisher=
2021
-
[29]
IEEE Sensors Journal , year=
Deep Learning-based Human Activity Recognition with FMCW Radar: A Review , author=. IEEE Sensors Journal , year=
-
[30]
Electronics , volume=
Depth Estimation Based on MMwave Radar and Camera Fusion with Attention Mechanisms and Multi-Scale Features for Autonomous Driving Vehicles , author=. Electronics , volume=. 2025 , publisher=
2025
-
[31]
Journal of King Saud University Computer and Information Sciences , volume=
Advances in object detection for autonomous driving using mmwave radar and camera: A comprehensive survey , author=. Journal of King Saud University Computer and Information Sciences , volume=. 2025 , publisher=
2025
-
[32]
2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF) , pages=
A deep learning-based radar and camera sensor fusion architecture for object detection , author=. 2019 Sensor Data Fusion: Trends, Solutions, Applications (SDF) , pages=. 2019 , organization=
2019
-
[33]
IEEE Sensors Journal , volume=
C4RFNet: Camera and 4D-radar fusion network for point cloud enhancement , author=. IEEE Sensors Journal , volume=. 2025 , publisher=
2025
-
[34]
Proceedings of the IEEE/CVF winter conference on applications of computer vision , pages=
Centerfusion: Center-based radar and camera fusion for 3d object detection , author=. Proceedings of the IEEE/CVF winter conference on applications of computer vision , pages=
-
[35]
2025 11th International Conference on Control, Decision and Information Technologies (CoDIT) , volume=
Robust Multiobject Tracking Using MmWave Radar-Event-Camera Sensor Fusion , author=. 2025 11th International Conference on Control, Decision and Information Technologies (CoDIT) , volume=. 2025 , organization=
2025
-
[36]
IEEE Sensors Journal , volume=
Robust detection and tracking method for moving object based on radar and camera data fusion , author=. IEEE Sensors Journal , volume=. 2021 , publisher=
2021
-
[37]
European conference on computer vision , pages=
Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d , author=. European conference on computer vision , pages=. 2020 , organization=
2020
-
[38]
Advances in Neural Information Processing Systems , volume=
Learning affinity via spatial propagation networks , author=. Advances in Neural Information Processing Systems , volume=
-
[39]
Computer Graphics Forum , volume=
Highly parallel fast KD-tree construction for interactive ray tracing of dynamic scenes , author=. Computer Graphics Forum , volume=. 2007 , organization=
2007
-
[40]
International Workshop on Artificial Intelligence and Statistics , pages=
Nonlinear dimensionality reduction by semidefinite programming and kernel matrix factorization , author=. International Workshop on Artificial Intelligence and Statistics , pages=. 2005 , organization=
2005
-
[41]
IEEE Transactions on Aerospace and Electronic systems , volume=
Analysis of CFAR processors in nonhomogeneous background , author=. IEEE Transactions on Aerospace and Electronic systems , volume=. 1988 , publisher=
1988
-
[42]
2018 IEEE international conference on robotics and automation (ICRA) , pages=
Sparse-to-dense: Depth prediction from sparse depth samples and a single image , author=. 2018 IEEE international conference on robotics and automation (ICRA) , pages=. 2018 , organization=
2018
-
[43]
IEEE Transactions on Intelligent Vehicles , volume=
Semantic-guided depth completion from monocular images and 4d radar data , author=. IEEE Transactions on Intelligent Vehicles , volume=. 2024 , publisher=
2024
-
[44]
Sensors , volume=
Second: Sparsely embedded convolutional detection , author=. Sensors , volume=. 2018 , publisher=
2018
-
[45]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Pointpillars: Fast encoders for object detection from point clouds , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.