A Geometric Framework for Absolute Pose and Velocity Estimation with Event Cameras
Pith reviewed 2026-06-27 17:15 UTC · model grok-4.3
The pith
Absolute pose and velocity from event cameras are recoverable from three line correspondences via two geometric constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is a geometric framework for absolute pose and velocity estimation that uses two constraints: the orthogonality between a 3D line and the normal vector of its corresponding event plane, and the collinearity of an event with the 2D projection of its associated line. Based on these, linear and polynomial solvers are derived for pose estimation and linear plus optimization solvers for velocity, all requiring only a minimum of three event-line correspondences to determine the 6-DoF quantities independently.
What carries the argument
The two geometric constraints of line-event plane orthogonality and event-line projection collinearity, which enable closed-form solvers from three correspondences.
If this is right
- Linear solvers enable efficient absolute pose computation from events.
- A polynomial solver yields a globally optimal rotation estimate.
- Both angular and linear velocities are recoverable by a linear solver or an optimization-based one.
- The 6-DoF pose or velocities can be determined independently with three correspondences.
Where Pith is reading between the lines
- The same constraints might support fusion with inertial measurements to handle brief periods without detectable lines.
- Extension to rolling-shutter or multi-camera event rigs would require only re-deriving the projection collinearity term.
- In scenes where line detection is unreliable, the framework predicts graceful degradation rather than total failure if at least three good matches remain.
Load-bearing premise
Reliable correspondences can be established between 3D lines and the events they trigger, and the scene must contain enough lines to produce detectable events.
What would settle it
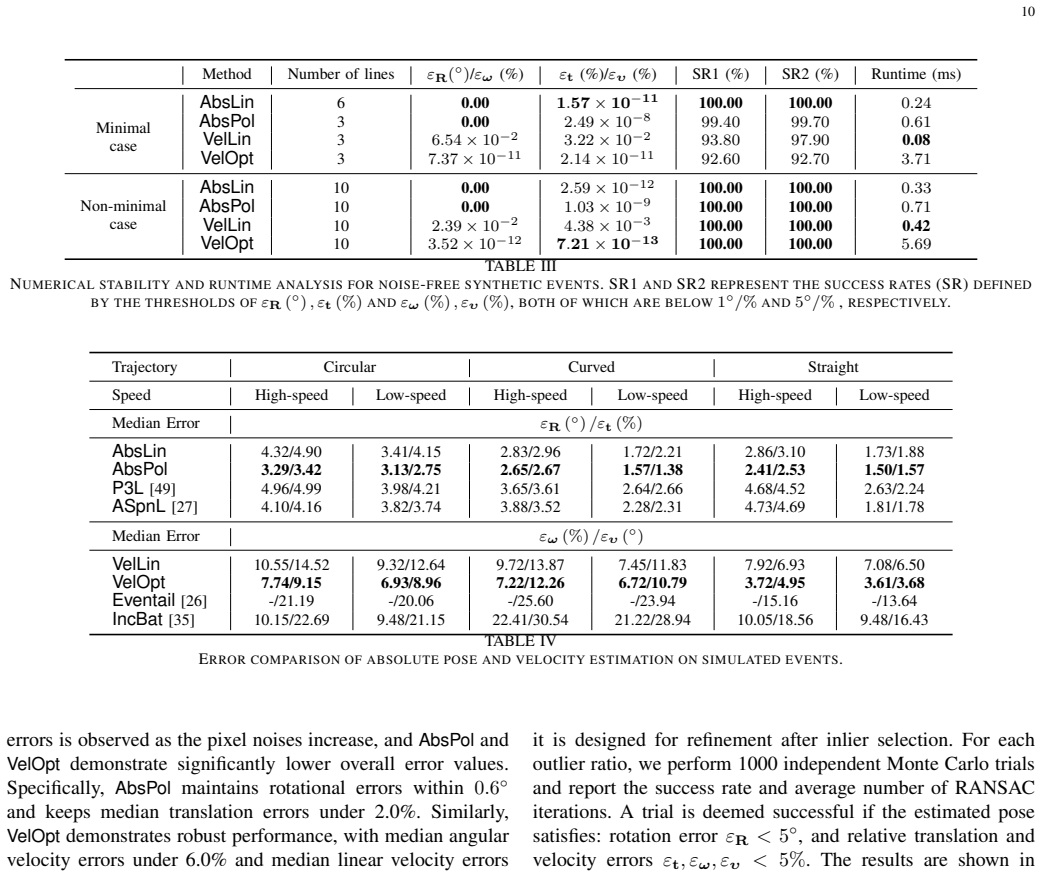
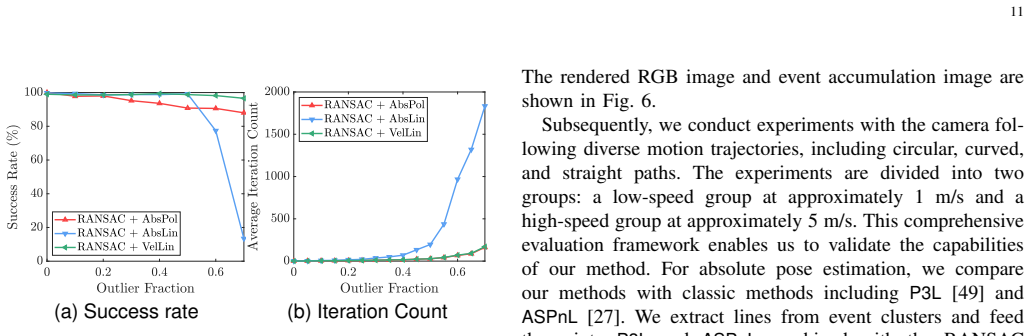
Generate synthetic event streams from known 3D lines and a ground-truth trajectory; if the solvers using exactly three correspondences produce pose or velocity errors larger than sensor noise, the framework does not hold.
Figures
read the original abstract
Despite the rapid advancements in event-based motion estimation, current geometric methods primarily focus on velocity estimation. However, absolute pose estimation, which is equally crucial for key applications such as robotic navigation and augmented reality, remains relatively underexplored. Consequently, the simultaneous recovery of absolute pose and velocity from event streams remains an open and challenging problem. To address this gap, we propose a geometric framework for absolute pose and velocity estimation by leveraging 3D lines in the scene and the events they trigger. At the core of the framework lie two key geometric constraints: the orthogonality between a 3D line and the normal vector of its corresponding event plane, and the collinearity of an event with the 2D projection of its associated line. Based on these constraints, we present both linear and polynomial solvers for absolute pose estimation. The former enables efficient computation, while the latter provides a globally optimal solution for rotation. For velocity estimation, we develop an efficient linear solver and a more accurate optimization-based solver to recover both angular and linear velocities. Notably, our methods require a minimum of three event-line correspondences to determine the 6-DoF absolute pose or velocities independently. Extensive experiments in simulation and on real-world datasets demonstrate that our methods achieve state-of-the-art performance, with significant improvements in accuracy and computational efficiency compared to existing methods. The demo code is publicly available at https://github.com/Zibin6/EventPoseVelocity.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a geometric framework for absolute pose and velocity estimation from event cameras by using 3D lines in the scene. It introduces two constraints per event-line correspondence (orthogonality of the 3D line to the event-plane normal, and collinearity of the event with the projected line) and derives linear and polynomial solvers for 6-DoF pose plus linear and optimization-based solvers for 6-DoF velocity, all requiring a minimum of three correspondences. Experiments on simulated and real data are reported to achieve SOTA accuracy and efficiency, with public code released.
Significance. If the correspondence assumption holds and the algebraic derivations are correct, the work addresses an underexplored problem in event-based vision by enabling absolute pose recovery (previously focused mainly on velocity) with minimal correspondences. The parameter-free geometric approach and public code are strengths that could support reproducibility and further development in robotics and AR applications.
major comments (2)
- [Abstract and geometric-constraints section] Abstract and geometric-constraints section: the claim that three event-line correspondences suffice for independent 6-DoF pose or velocity recovery is load-bearing, yet the manuscript provides no mechanism, algorithm, or validation procedure for establishing or verifying those correspondences under realistic event noise, partial occlusions, or line sparsity; without this, both the linear and polynomial solvers are inapplicable regardless of their algebraic correctness.
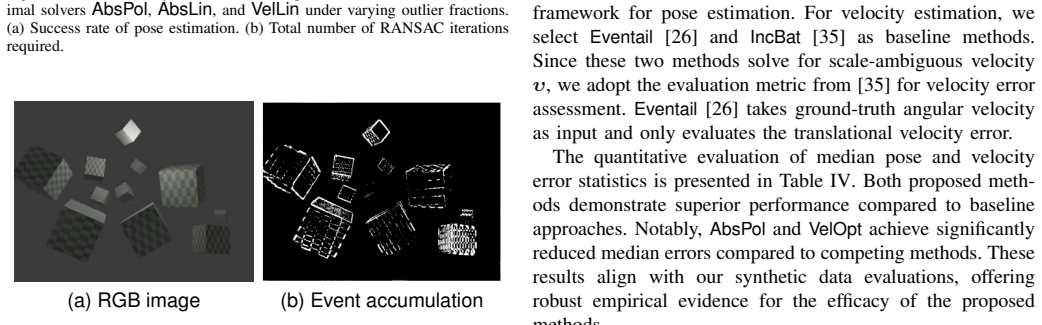
- [Solver derivations and experiments] Solver derivations and experiments: no error-propagation analysis, degeneracy characterization, or data-exclusion rules are supplied for the minimum-three-correspondence case, making it impossible to assess whether the reported SOTA improvements are robust or contingent on favorable matching conditions.
minor comments (2)
- [Geometric constraints] Notation for the event plane and its normal should be defined explicitly before the orthogonality constraint is stated.
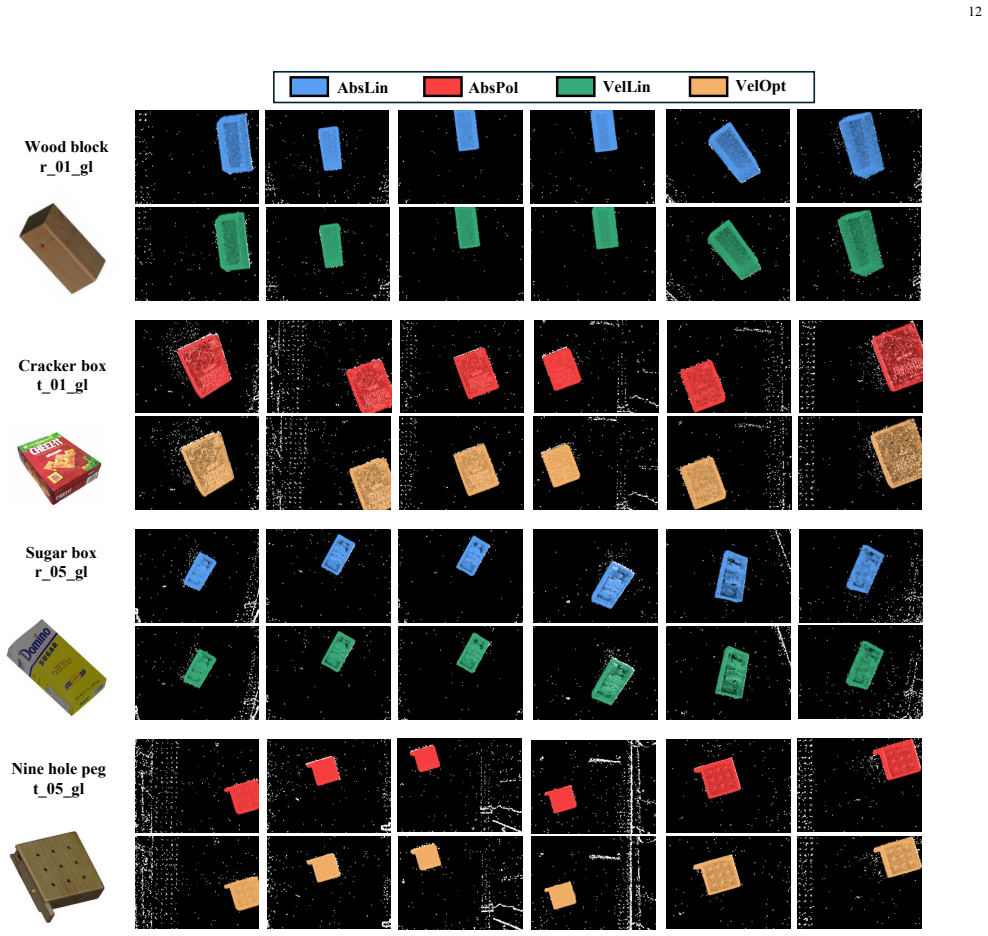
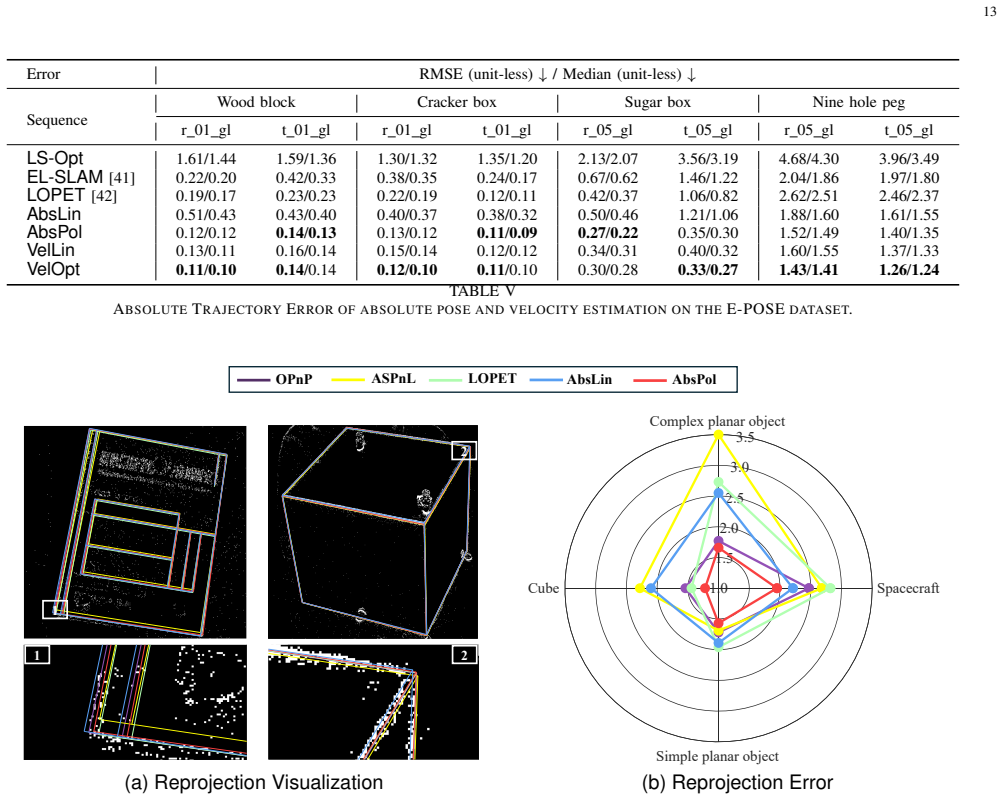
- [Experiments] Figure captions for the real-world dataset results should include the number of event-line correspondences used per frame.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback on our manuscript. We address each of the major comments below.
read point-by-point responses
-
Referee: [Abstract and geometric-constraints section] Abstract and geometric-constraints section: the claim that three event-line correspondences suffice for independent 6-DoF pose or velocity recovery is load-bearing, yet the manuscript provides no mechanism, algorithm, or validation procedure for establishing or verifying those correspondences under realistic event noise, partial occlusions, or line sparsity; without this, both the linear and polynomial solvers are inapplicable regardless of their algebraic correctness.
Authors: The manuscript focuses on developing a geometric framework and minimal solvers assuming that event-line correspondences are given, which is a common practice in the development of geometric computer vision algorithms (e.g., essential matrix estimation or PnP solvers). The algebraic derivations are independent of how correspondences are obtained. We will revise the paper to make this assumption explicit in the abstract and introduction, and to briefly discuss related work on event-based feature detection and matching that could be used to obtain such correspondences in practice. This clarification will help readers understand the scope of the contribution. revision: partial
-
Referee: [Solver derivations and experiments] Solver derivations and experiments: no error-propagation analysis, degeneracy characterization, or data-exclusion rules are supplied for the minimum-three-correspondence case, making it impossible to assess whether the reported SOTA improvements are robust or contingent on favorable matching conditions.
Authors: We acknowledge the value of including an analysis of error propagation, degeneracies, and rules for handling unreliable correspondences in the minimal case. In the revised version, we will add a subsection discussing potential degenerate cases for the three-correspondence solvers (e.g., when lines are parallel or the configuration leads to singular matrices) and provide an empirical sensitivity analysis using the simulated data with varying noise levels. We will also suggest simple data-exclusion criteria based on the reprojection residuals or the condition number of the design matrix in the linear solvers. revision: yes
Circularity Check
No circularity: derivation follows from standard projective geometry constraints
full rationale
The framework defines two geometric constraints (orthogonality of 3D line to event-plane normal; collinearity of event with projected line) from the event camera model and scene lines, then algebraically solves for 6-DoF pose or velocity using a minimum of three correspondences. These steps are direct consequences of the input geometry and degrees-of-freedom counting; no parameter is fitted to data and renamed as a prediction, no self-citation chain justifies a uniqueness claim, and no ansatz is smuggled in. The derivation is self-contained against external projective geometry benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption 3D lines exist in the scene and generate detectable events that can be corresponded to the lines
Reference graph
Works this paper leans on
-
[1]
Visual odometry,
D. Nist ´er, O. Naroditsky, and J. Bergen, “Visual odometry,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2004
2004
-
[2]
ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap SLAM,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. M. Montiel, and J. D. Tard´os, “ORB-SLAM3: An accurate open-source library for visual, visual–inertial, and multimap SLAM,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[3]
UPnP: An optimal o(n) solution to the absolute pose problem with universal applicability,
L. Kneip, H. Li, and Y . Seo, “UPnP: An optimal o(n) solution to the absolute pose problem with universal applicability,” inProc. Eur. Conf. Comput. Vis., 2014, pp. 127–142
2014
-
[4]
EPnP: An accurate o(n) solution to the PnP problem,
V . Lepetit, F. Moreno-Noguer, and P. Fua, “EPnP: An accurate o(n) solution to the PnP problem,”Int. J. Comput. Vis., vol. 81, no. 2, pp. 155–166, 2009
2009
-
[5]
Affine correspondences between multi-camera systems for relative pose estimation,
B. Guan and J. Zhao, “Affine correspondences between multi-camera systems for relative pose estimation,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 48, no. 2, pp. 2012–2029, 2026
2012
-
[6]
An efficient solution to the five-point relative pose problem,
D. Nister, “An efficient solution to the five-point relative pose problem,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 26, no. 6, pp. 756–770, 2004. 15
2004
-
[7]
A complete solution to generalized rel- ative pose estimation from affine correspondences,
B. Guan, J. Zhao, and L. Kneip, “A complete solution to generalized rel- ative pose estimation from affine correspondences,”IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 1–15, 2026
2026
-
[8]
Power bundle adjustment for large-scale 3d reconstruction,
S. Weber, N. Demmel, T. C. Chan, and D. Cremers, “Power bundle adjustment for large-scale 3d reconstruction,” inIEEE Conference on Computer Vision and Pattern Recognition, 2023, pp. 281–289
2023
-
[9]
A pose-only geometric constraint for multi-camera pose adjustment,
S. Liang, B. Guan, B. Li, Q. Yu, and Y . Shang, “A pose-only geometric constraint for multi-camera pose adjustment,”IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 1–18, 2026
2026
-
[10]
Event-based vision: a survey,
G. Gallego, T. Delbr ¨uck, G. Orchard, C. Bartolozzi, B. Taba, A. Censi, S. Leutenegger, A. J. Davison, J. Conradt, K. Daniilidis, and D. Scara- muzza, “Event-based vision: a survey,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 1, pp. 154–180, 2022
2022
-
[11]
1000×faster camera and machine vision with ordinary devices,
T. Huang, Y . Zheng, Z. Yu, R. Chen, Y . Li, R. Xiong, L. Ma, J. Zhao, S. Dong, L. Zhuet al., “1000×faster camera and machine vision with ordinary devices,”Engineering, vol. 25, pp. 110–119, 2023
2023
-
[12]
Robust decoding of rich dynamical visual scenes with retinal spikes,
Z. Yu, T. Bu, Y . Zhang, S. Jia, T. Huang, and J. K. Liu, “Robust decoding of rich dynamical visual scenes with retinal spikes,”IEEE Trans. Neural Networks Learn. Syst., vol. 36, no. 2, pp. 3396–3409, 2025
2025
-
[13]
Cwscnet: Channel-weighted skip connection network for underwater object detection,
L. Chen, Y . Xie, Y . Li, Q. Xu, and J. Dong, “Cwscnet: Channel-weighted skip connection network for underwater object detection,”IEEE Trans. Image Process., vol. 33, pp. 5206–5218, 2024
2024
-
[14]
Spiking neural networks with adaptive membrane time constant for event-based tracking,
J. Zhang, M. Zhang, Y . Wang, Q. Liu, B. Yin, H. Li, and X. Yang, “Spiking neural networks with adaptive membrane time constant for event-based tracking,”IEEE Trans. Image Process., vol. 34, pp. 1009– 1021, 2025
2025
-
[15]
Low-latency automotive vision with event cameras,
D. Gehrig and D. Scaramuzza, “Low-latency automotive vision with event cameras,”Nature, vol. 629, no. 8014, pp. 1034–1040, 2024
2024
-
[16]
Dynamic obstacle avoidance for quadrotors with event cameras,
F. Davide, K. Kevin, and S. Davide, “Dynamic obstacle avoidance for quadrotors with event cameras,”Sci. Robot., vol. 5, no. 40, p. eaaz9712, 2020
2020
-
[17]
Augmented reality versus virtual reality for 3d object manipulation,
M. Krichenbauer, G. Yamamoto, T. Taketom, C. Sandor, and H. Kato, “Augmented reality versus virtual reality for 3d object manipulation,” IEEE Trans. Vis. Comput. Graphics, vol. 24, no. 2, pp. 1038–1048, 2018
2018
-
[18]
Generating light field from stereo images for ar display with matched angular sampling structure and minimal retinal error,
Y .-C. Chen and H. H. Chen, “Generating light field from stereo images for ar display with matched angular sampling structure and minimal retinal error,”IEEE Trans. Image Process., vol. 34, pp. 3849–3860, 2025
2025
-
[19]
Microsaccade-inspired event camera for robotics,
B. He, Z. Wang, Y . Zhou, J. Chen, C. D. Singh, H. Li, Y . Gao, S. Shen, K. Wang, Y . Caoet al., “Microsaccade-inspired event camera for robotics,”Sci. Robot., vol. 9, no. 90, p. eadj8124, 2024
2024
-
[20]
Fast event-based corner detection,
E. Mueggler, C. Bartolozzi, and D. Scaramuzza, “Fast event-based corner detection,” inProc. Brit. Mach. Vis. Conf., 2017
2017
-
[21]
luvHarris: A practical corner detector for event-cameras,
A. Glover, A. Dinale, L. D. S. Rosa, S. Bamford, and C. Bartolozzi, “luvHarris: A practical corner detector for event-cameras,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 44, no. 12, pp. 10 087–10 098, 2021
2021
-
[22]
IDOL: A framework for IMU-DVS odometry using lines,
C. Le Gentil, F. Tschopp, I. Alzugaray, T. Vidal-Calleja, R. Siegwart, and J. Nieto, “IDOL: A framework for IMU-DVS odometry using lines,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst., 2020, pp. 5863–5870
2020
-
[23]
Event-based line fitting and segment detection using a neuromorphic visual sensor,
D. R. Valeiras, X. Clady, S.-H. Ieng, and R. Benosman, “Event-based line fitting and segment detection using a neuromorphic visual sensor,” IEEE Trans. Neural Networks Learn. Syst., vol. 30, no. 4, pp. 1218– 1230, 2018
2018
-
[24]
Hong Kong world: Leveraging structural regularity for line-based SLAM,
H. Li, J. Zhao, J.-C. Bazin, P. Kim, K. Joo, Z. Zhao, and Y .-H. Liu, “Hong Kong world: Leveraging structural regularity for line-based SLAM,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 45, no. 11, pp. 13 035–13 053, 2023
2023
-
[25]
A 5-point minimal solver for event camera relative motion estimation,
L. Gao, H. Su, D. Gehrig, M. Cannici, D. Scaramuzza, and L. Kneip, “A 5-point minimal solver for event camera relative motion estimation,” inProc. IEEE Int. Conf. Comput. Vis., 2023, pp. 8049–8059
2023
-
[26]
An n-point linear solver for line and motion estimation with event cameras,
L. Gao, D. Gehrig, H. Su, D. Scaramuzza, and L. Kneip, “An n-point linear solver for line and motion estimation with event cameras,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2024, pp. 14 596–14 605
2024
-
[27]
Pose estimation from line correspondences: A complete analysis and a series of solutions,
C. Xu, L. Zhang, L. Cheng, and R. Koch, “Pose estimation from line correspondences: A complete analysis and a series of solutions,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 6, pp. 1209–1222, 2017
2017
-
[28]
Hartley and A
R. Hartley and A. Zisserman,Multiple view geometry in computer vision. Cambridge University Press, 2003
2003
-
[29]
Camera pose estimation from lines using pl ¨ucker coordinates,
B. P ˇribyl, P. Zemˇc´ık, and M. ˇCad´ık, “Camera pose estimation from lines using pl ¨ucker coordinates,” inProc. Brit. Mach. Vis. Conf., 2015
2015
-
[30]
Iterative pose computation from line corre- spondences,
S. Christy and R. Horaud, “Iterative pose computation from line corre- spondences,”Comput. Vis. Image Underst., vol. 73, no. 1, pp. 137–144, 1999
1999
-
[31]
A unifying contrast maximization framework for event cameras, with applications to motion, depth, and optical flow estimation,
G. Gallego, H. Rebecq, and D. Scaramuzza, “A unifying contrast maximization framework for event cameras, with applications to motion, depth, and optical flow estimation,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2018, pp. 3867–3876
2018
-
[32]
CMax-SLAM: Event-based rotational-motion bundle adjustment and SLAM system using contrast maximization,
S. Guo and G. Gallego, “CMax-SLAM: Event-based rotational-motion bundle adjustment and SLAM system using contrast maximization,” IEEE Trans. Robot., vol. 40, pp. 2442–2461, 2024
2024
-
[33]
Continuous event-line con- straint for closed-form velocity initialization,
X. Peng, W. Xu, J. Yang, and L. Kneip, “Continuous event-line con- straint for closed-form velocity initialization,” inProc. Brit. Mach. Vis. Conf., 2021
2021
-
[34]
Event-based visual inertial velometer,
X. Lu, Y . Zhou, and S. Shen, “Event-based visual inertial velometer,” inProc. Robot.: Sci. Syst., 2024
2024
-
[35]
Full-DoF egomotion estimation for event cameras using geometric solvers,
J. Zhao, B. Guan, Z. Liu, and L. Kneip, “Full-DoF egomotion estimation for event cameras using geometric solvers,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2025, pp. 11 515–11 524
2025
-
[36]
ESVO2: Direct visual-inertial odometry with stereo event cameras,
J. Niu, S. Zhong, X. Lu, S. Shen, G. Gallego, and Y . Zhou, “ESVO2: Direct visual-inertial odometry with stereo event cameras,”IEEE Trans. Robot., pp. 1–20, 2025
2025
-
[37]
Event-aided direct sparse odometry,
J. Hidalgo-Carri ´o, G. Gallego, and D. Scaramuzza, “Event-aided direct sparse odometry,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2022, pp. 5771–5780
2022
-
[38]
Ultimate SLAM? combining events, images, and imu for robust visual SLAM in hdr and high-speed scenarios,
A. R. Vidal, H. Rebecq, T. Horstschaefer, and D. Scaramuzza, “Ultimate SLAM? combining events, images, and imu for robust visual SLAM in hdr and high-speed scenarios,”IEEE Robot. Autom. Lett., vol. 3, no. 2, pp. 994–1001, 2018
2018
-
[39]
Event-based visual inertial odometry,
A. Z. Zhu, N. Atanasov, and K. Daniilidis, “Event-based visual inertial odometry,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2017, pp. 5816–5824
2017
-
[40]
EVO: a geometric approach to event-based 6-DoF parallel tracking and mapping in real time,
H. Rebecq, T. Horstschaefer, G. Gallego, and D. Scaramuzza, “EVO: a geometric approach to event-based 6-DoF parallel tracking and mapping in real time,”IEEE Robot. Autom. Lett., vol. 2, no. 2, pp. 593–600, 2017
2017
-
[41]
Event-based line SLAM in real-time,
W. Chamorro, J. Sol `a, and J. Andrade-Cetto, “Event-based line SLAM in real-time,”IEEE Robot. Autom. Lett., vol. 7, no. 3, pp. 8146–8153, 2022
2022
-
[42]
Line-based 6-DoF object pose estimation and tracking with an event camera,
Z. Liu, B. Guan, Y . Shang, Q. Yu, and L. Kneip, “Line-based 6-DoF object pose estimation and tracking with an event camera,”IEEE Trans. Image Process., vol. 33, pp. 4765–4780, 2024
2024
-
[43]
Motion and structure from event-based normal flow,
Z. Ren, B. Liao, D. Kong, J. Li, P. Liu, L. Kneip, G. Gallego, and Y . Zhou, “Motion and structure from event-based normal flow,” inProc. Eur. Conf. Comput. Vis., 2024
2024
-
[44]
Globally optimal DLS method for PnP problem with Cayley parameterization,
G. Nakano, “Globally optimal DLS method for PnP problem with Cayley parameterization,” inProc. Brit. Mach. Vis. Conf., 2015
2015
-
[45]
Globally optimal pose estimation from line correspondences,
F. M. Mirzaei and S. I. Roumeliotis, “Globally optimal pose estimation from line correspondences,” inProc. IEEE Int. Conf. Robot. Autom., 2011, pp. 5581–5588
2011
-
[46]
Efficient solvers for minimal problems by syzygy-based reduction,
V . Larsson, K. Astrom, and M. Oskarsson, “Efficient solvers for minimal problems by syzygy-based reduction,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2017, pp. 2383–2392
2017
-
[47]
A linear approach to motion estimation using generalized camera models,
H. Li, R. Hartley, and J.-h. Kim, “A linear approach to motion estimation using generalized camera models,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit., 2008, pp. 1–8
2008
-
[48]
Direct optimization of frame-to-frame rotation,
L. Kneip and S. Lynen, “Direct optimization of frame-to-frame rotation,” inProc. IEEE Int. Conf. Comput. Vis., 2013, pp. 2352–2359
2013
-
[49]
Determination of the attitude of 3d objects from a single perspective view,
M. Dhome, M. Richetin, J.-T. Lapreste, and G. Rives, “Determination of the attitude of 3d objects from a single perspective view,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 11, no. 12, pp. 1265–1278, 1989
1989
-
[50]
V2E: From video frames to realistic dvs events,
Y . Hu, S.-C. Liu, and T. Delbr ¨uck, “V2E: From video frames to realistic dvs events,” inProc. IEEE Conf. Comput. Vis. Pattern Recognit. Work., 2021, pp. 1312–1321
2021
-
[51]
E-POSE: A large scale event camera dataset for object pose estimation,
O. A. Hay, X. Huang, A. Ayyad, E. Sherif, R. Almadhoun, Y . Abdul- rahman, L. Seneviratne, A. Abusafieh, and Y . Zweiri, “E-POSE: A large scale event camera dataset for object pose estimation,”Scientific Data, vol. 12, no. 1, p. 245, 2025
2025
-
[52]
EVO: Python package for the evaluation of odometry and SLAM
M. Grupp, “EVO: Python package for the evaluation of odometry and SLAM.” https://github.com/MichaelGrupp/evo, 2017
2017
-
[53]
Revisiting the PnP problem: A fast, general and optimal solution,
Y . Zheng, Y . Kuang, S. Sugimoto, K. Astrom, and M. Okutomi, “Revisiting the PnP problem: A fast, general and optimal solution,” in Proc. IEEE Int. Conf. Comput. Vis., 2013, pp. 2344–2351
2013
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.