Failure-Based Testing for Deep Reinforcement Learning Agents
Pith reviewed 2026-07-01 04:10 UTC · model grok-4.3
The pith
A black-box testing method for deep reinforcement learning agents prioritizes difficult tasks to find failures with lower cost and higher diversity than random testing.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that because DRL agents are built around human-defined tasks, task difficulty supplies reliable signals for locating failure-prone regions of the input space; Prior Random Testing exploits these signals in a black-box setting to rank and generate tests that detect failures more efficiently than random sampling while retaining diversity.
What carries the argument
Prior Random Testing (PRT), which estimates task difficulty from human task specifications and uses that estimate to prioritize test cases in a way that balances focus on hard regions with maintained randomness.
If this is right
- PRT detects the first failure at lower cost than random testing on the evaluated benchmarks.
- Generated test suites show greater diversity than those from random testing.
- The method ranks among top performers when compared with fuzzing, search-based, and generative testing approaches.
- Testing cost drops by more than 50 percent versus random testing while still locating failures in well-trained agents.
Where Pith is reading between the lines
- The same difficulty cue might help test other learned controllers if their performance also degrades predictably with task complexity.
- Integration into automated pipelines could let teams run PRT continuously as models are retrained.
- If difficulty estimation can be learned rather than taken from human specs, the method might extend to domains lacking clear task labels.
Load-bearing premise
Agents fail more often on tasks that humans label as more difficult, and those labels can be used directly to guide testing without any model access.
What would settle it
Measure failure rates of a trained DRL agent across a benchmark with explicitly varied task difficulty levels; if failure rates do not rise reliably with difficulty, or if PRT shows no consistent reduction in tests needed to find the first failure, the prioritization claim does not hold.
Figures
read the original abstract
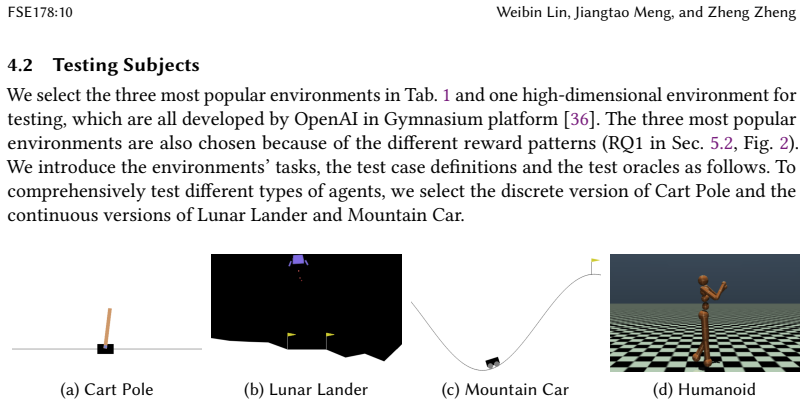
Deep Reinforcement Learning (DRL) agents have been widely adopted across diverse domains to address challenging decision-making problems, such as autonomous driving and robotic control. Given that many of these applications are safety- and security-critical, rigorous testing of DRL agents is indispensable. Existing testing methods are typically guided by reward signals to detect failures. However, for well-trained agents, whose performance approaches optimal levels in standard operating conditions, reward signals remain generally high, making current methods ineffective at uncovering critical failures. To address these challenges, we propose a novel failure-based method that leverages task-induced failure insights to enhance failure detection capability while reducing the number of tests required. Since DRL agents are inherently designed with human-defined tasks, they provide valuable cues about task difficulty. Intuitively, a DRL agent is more likely to fail when confronted with a more difficult task; therefore, PRT prioritizes these tasks. Building on this foundation, we propose Prior Random Testing, a black-box failure-based testing method that enables targeted prioritization while preserving the diversity of generated test cases. Guided by task-induced failure insights, PRT prioritizes failure-prone regions of the input domain, thereby facilitating efficient failure detection. PRT is evaluated on four widely used benchmarks and compared with different state-of-the-art methods including fuzzing, search-based and generative-based methods. PRT ranks among the top performers in terms of both the cost of finding the first failure and the diversity of test cases. Notably, compared to random testing, PRT achieves better diversity and reduces the testing cost by over 50%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Prior Random Testing (PRT), a black-box failure-based testing method for DRL agents. It uses human-defined task difficulty as a cue to prioritize failure-prone input regions under the assumption that agents fail more often on harder tasks, claiming this yields over 50% lower cost to first failure than random testing, better diversity, and top-ranked performance against fuzzing, search-based, and generative methods on four benchmarks.
Significance. If the core assumption holds and the results are reproducible with proper controls, PRT could offer a lightweight, model-free way to improve failure detection efficiency for safety-critical DRL systems where reward signals are uninformative for well-trained agents.
major comments (2)
- [Abstract] Abstract: the quantified claim of 'over 50%' testing cost reduction versus random testing (and top-ranked performance on cost and diversity) is stated without any reference to experimental data, tables, statistical tests, variance, or benchmark-specific results, preventing verification that the experiments support the central performance claims.
- [Abstract] Abstract: the load-bearing premise that 'a DRL agent is more likely to fail when confronted with a more difficult task' (used to justify prioritization) is presented as intuitive with no supporting measurement, correlation analysis, sensitivity study, or counterexample evaluation in the black-box setting; if this link does not hold, the prioritization step confers no advantage and the performance claims collapse.
minor comments (1)
- [Abstract] The abstract names the evaluation approach ('fuzzing, search-based and generative-based methods') and metrics ('cost of finding the first failure' and 'diversity') but provides no specifics on the exact baselines, diversity metric definition, or how cost is measured (e.g., number of tests or wall-clock time).
Simulated Author's Rebuttal
Thank you for reviewing our paper and providing these valuable comments. We have carefully considered the points raised regarding the abstract and will make the necessary revisions to strengthen the presentation of our results and the justification of our approach.
read point-by-point responses
-
Referee: [Abstract] Abstract: the quantified claim of 'over 50%' testing cost reduction versus random testing (and top-ranked performance on cost and diversity) is stated without any reference to experimental data, tables, statistical tests, variance, or benchmark-specific results, preventing verification that the experiments support the central performance claims.
Authors: We recognize that the abstract states the performance claims without direct citations to the supporting experimental results. To address this, we will revise the abstract to reference the relevant tables and sections in the manuscript where the detailed results, including variance and statistical tests, are presented. This will allow readers to more easily verify the claims. revision: yes
-
Referee: [Abstract] Abstract: the load-bearing premise that 'a DRL agent is more likely to fail when confronted with a more difficult task' (used to justify prioritization) is presented as intuitive with no supporting measurement, correlation analysis, sensitivity study, or counterexample evaluation in the black-box setting; if this link does not hold, the prioritization step confers no advantage and the performance claims collapse.
Authors: The assumption regarding task difficulty and failure likelihood is introduced as an intuition guiding the method design. We agree that empirical validation in the black-box setting would be valuable. We will add supporting measurements, such as correlation analysis between task difficulty and observed failure rates, along with sensitivity studies on the four benchmarks in the revised version of the paper. revision: yes
Circularity Check
No circularity; claims rest on external empirical evaluation against baselines
full rationale
The paper defines PRT as a black-box prioritization method using the explicit intuition that DRL agents fail more on human-defined difficult tasks, then reports performance (e.g., >50% cost reduction vs. random testing) from direct comparisons on four benchmarks against fuzzing, search-based, and generative methods. No equations, fitted parameters, or self-citations are present that would make any result equivalent to its inputs by construction. The assumption is stated openly as intuitive rather than derived, and results are measured externally, making the derivation self-contained.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption DRL agents are more likely to fail when confronted with a more difficult task
Reference graph
Works this paper leans on
-
[1]
Tesla Robotaxi Hits Parked Car in First Recorded Accident
2025. Tesla Robotaxi Hits Parked Car in First Recorded Accident. PC Magazine
2025
-
[2]
Kai Arulkumaran, Marc Peter Deisenroth, Miles Brundage, and Anil Anthony Bharath. 2017. Deep reinforcement learning: A brief survey.IEEE Signal Processing Magazine34, 6 (2017), 26–38
2017
-
[3]
Andrew G. Barto, Richard S. Sutton, and Charles W. Anderson. 1983. Neuronlike adaptive elements that can solve difficult learning control problems.IEEE Transactions on Systems, Man, and CyberneticsSMC-13, 5 (1983), 834–846. doi:10.1109/TSMC.1983.6313077
-
[4]
Jan Beirlant, Edward J Dudewicz, László Györfi, Edward C Van der Meulen, et al . 1997. Nonparametric entropy estimation: An overview.International Journal of Mathematical and Statistical Sciences6, 1 (1997), 17–39
1997
-
[5]
Matteo Biagiola and Paolo Tonella. 2024. Testing of Deep Reinforcement Learning Agents with Surrogate Models. ACM Trans. Softw. Eng. Methodol.33, 3, Article 73 (March 2024), 33 pages. doi:10.1145/3631970
-
[6]
Tsong Yueh Chen, Fei-Ching Kuo, Robert G. Merkel, and T.H. Tse. 2010. Adaptive Random Testing: The ART of test case diversity.Journal of Systems and Software83, 1 (2010), 60–66. doi:10.1016/j.jss.2009.02.022 SI: Top Scholars
-
[7]
T. Y. Chen, H. Leung, and I. K. Mak. 2005. Adaptive Random Testing. InAdvances in Computer Science - ASIAN 2004. Higher-Level Decision Making, Michael J. Maher (Ed.). Springer Berlin Heidelberg, Berlin, Heidelberg, 320–329
2005
-
[8]
2006.Elements of Information Theory
Thomas M Cover and Joy A Thomas. 2006.Elements of Information Theory. Vol. 1. John Wiley & Sons
2006
-
[9]
Bellemare, and Rémi Munos
Will Dabney, Mark Rowland, Marc G. Bellemare, and Rémi Munos. 2018. Distributional reinforcement learning with quantile regression. InProceedings of the Thirty-Second AAAI Conference on Artificial Intelligence and Thirtieth Innovative Applications of Artificial Intelligence Conference and Eighth AAAI Symposium on Educational Advances in Artificial Intelli...
2018
-
[10]
Yi Dong, Xingyu Zhao, Sen Wang, and Xiaowei Huang. 2024. Reachability Verification Based Reliability Assessment for Deep Reinforcement Learning Controlled Robotics and Autonomous Systems.IEEE Robotics and Automation Letters 9, 4 (2024), 3299–3306. doi:10.1109/LRA.2024.3364471
-
[11]
Jingliang Duan, Wenxuan Wang, Liming Xiao, Jiaxin Gao, Shengbo Eben Li, Chang Liu, Ya-Qin Zhang, Bo Cheng, and Keqiang Li. 2025. Distributional Soft Actor-Critic With Three Refinements.IEEE Transactions on Pattern Analysis and Machine Intelligence47, 5 (2025), 3935–3946. doi:10.1109/TPAMI.2025.3537087
-
[12]
Gros, Valentin Wüstholz, Jörg Hoffmann, and Maria Christakis
Hasan Ferit Eniser, Timo P. Gros, Valentin Wüstholz, Jörg Hoffmann, and Maria Christakis. 2022. Metamorphic relations via relaxations: an approach to obtain oracles for action-policy testing. InProceedings of the 31st ACM SIGSOFT International Symposium on Software Testing and Analysis(Virtual, South Korea)(ISSTA 2022). Association for Computing Machinery...
-
[13]
Scott Fujimoto, Herke Hoof, and David Meger. 2018. Addressing function approximation error in actor-critic methods. InInternational conference on machine learning. PMLR, 1587–1596
2018
-
[14]
Weihao Gao, Sreeram Kannan, Sewoong Oh, and Pramod Viswanath. 2017. Estimating Mutual Information for Discrete-Continuous Mixtures. InAdvances in Neural Information Processing Systems, I. Guyon, U. Von Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vishwanathan, and R. Garnett (Eds.), Vol. 30. Curran Associates, Inc. https: //proceedings.neurips.cc/paper_f...
2017
-
[15]
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor
Tuomas Haarnoja, Aurick Zhou, P. Abbeel, and Sergey Levine. 2018. Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor.ArXivabs/1801.01290 (2018). https://api.semanticscholar.org/ CorpusID:28202810
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[16]
Junda He, Zhou Yang, Jieke Shi, Chengran Yang, Kisub Kim, Bowen Xu, Xin Zhou, and David Lo. 2024. Curiosity-Driven Testing for Sequential Decision-Making Process. InProceedings of the IEEE/ACM 46th International Conference on Software Engineering. 1–14
2024
-
[17]
David Isele, Reza Rahimi, Akansel Cosgun, Kaushik Subramanian, and Kikuo Fujimura. 2018. Navigating occluded intersections with autonomous vehicles using deep reinforcement learning. In2018 IEEE international conference on robotics and automation (ICRA). IEEE, 2034–2039
2018
-
[18]
Kozachenko and Nikolai N
Leonid F. Kozachenko and Nikolai N. Leonenko. 1987. Sample estimate of the entropy of a random vector.Problems of Information Transmission23, 2 (1987), 95–101
1987
-
[19]
Arsenii Kuznetsov, Pavel Shvechikov, Alexander Grishin, and Dmitry Vetrov. 2020. Controlling overestimation bias with truncated mixture of continuous distributional quantile critics. InInternational Conference on Machine Learning. PMLR, 5556–5566
2020
-
[20]
Zhuo Li, Xiongfei Wu, Derui Zhu, Mingfei Cheng, Siyuan Chen, Fuyuan Zhang, Xiaofei Xie, Lei Ma, and Jianjun Zhao
-
[21]
In2023 38th IEEE/ACM International Conference on Automated Software Engineering (ASE)
Generative model-based testing on decision-making policies. In2023 38th IEEE/ACM International Conference on Automated Software Engineering (ASE). IEEE, 243–254
-
[22]
Timothy P Lillicrap, Jonathan J Hunt, Alexander Pritzel, Nicolas Heess, Tom Erez, Yuval Tassa, David Silver, and Daan Wierstra. 2015. Continuous control with deep reinforcement learning.arXiv preprint arXiv:1509.02971(2015)
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[23]
Xuyan Ma, Yawen Wang, Junjie Wang, Xiaofei Xie, Boyu Wu, Shoubin Li, Fanjiang Xu, and Qing Wang. 2024. Enhancing multi-agent system testing with diversity-guided exploration and adaptive critical state exploitation. InProceedings of Proc. ACM Softw. Eng., Vol. 3, No. FSE, Article FSE178. Publication date: July 2026. FSE178:22 Weibin Lin, Jiangtao Meng, an...
2024
-
[24]
Quentin Mazouni, Helge Spieker, Arnaud Gotlieb, and Mathieu Acher. 2024. Policy Testing with MDPFuzz (Replicability Study). InProceedings of the 33rd ACM SIGSOFT International Symposium on Software Testing and Analysis. 1567–1578
2024
-
[25]
Quentin Mazouni, Helge Spieker, Arnaud Gotlieb, and Mathieu Acher. 2024. Testing for Fault Diversity in Reinforcement Learning. InProceedings of the 5th ACM/IEEE International Conference on Automation of Software Test (AST 2024)(Lisbon, Portugal)(AST ’24). Association for Computing Machinery, New York, NY, USA, 136–146. doi:10.1145/3644032.3644458
-
[26]
Lillicrap, Tim Harley, David Silver, and Koray Kavukcuoglu
Volodymyr Mnih, Adrià Puigdomènech Badia, Mehdi Mirza, Alex Graves, Timothy P. Lillicrap, Tim Harley, David Silver, and Koray Kavukcuoglu. 2016. Asynchronous Methods for Deep Reinforcement Learning. InInternational Conference on Machine Learning. https://api.semanticscholar.org/CorpusID:6875312
2016
-
[27]
Volodymyr Mnih, Koray Kavukcuoglu, David Silver, Alex Graves, Ioannis Antonoglou, Daan Wierstra, and Martin Riedmiller. 2013. Playing atari with deep reinforcement learning.arXiv preprint arXiv:1312.5602(2013)
work page internal anchor Pith review Pith/arXiv arXiv 2013
-
[28]
1990.Efficient Memory-based Learning for Robot Control
Andrew William Moore. 1990.Efficient Memory-based Learning for Robot Control. Technical Report. University of Cambridge
1990
-
[29]
Hai Nguyen and Hung La. 2019. Review of deep reinforcement learning for robot manipulation. In2019 Third IEEE international conference on robotic computing (IRC). IEEE, 590–595
2019
-
[30]
Qi Pang, Yuanyuan Yuan, and Shuai Wang. 2022. Mdpfuzz: testing models solving markov decision processes. In Proceedings of the 31st ACM SIGSOFT International Symposium on Software Testing and Analysis. 378–390
2022
-
[31]
John Schulman, Sergey Levine, Philipp Moritz, Michael Jordan, and Pieter Abbeel. 2015. Trust region policy optimization. InProceedings of the 32nd International Conference on International Conference on Machine Learning - Volume 37(Lille, France)(ICML’15). JMLR.org, 1889–1897
2015
-
[32]
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. 2017. Proximal policy optimization algorithms.arXiv preprint arXiv:1707.06347(2017)
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[33]
David Silver, Thomas Hubert, Julian Schrittwieser, Ioannis Antonoglou, Matthew Lai, Arthur Guez, Marc Lanctot, Laurent Sifre, Dharshan Kumaran, Thore Graepel, et al. 2018. A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play.Science362, 6419 (2018), 1140–1144
2018
-
[34]
Amal Sunba, Jameleddine Hassine, and Moataz Ahmed. 2026. Testing reinforcement learning systems: A comprehensive review.Journal of Systems and Software231 (2026), 112563. doi:10.1016/j.jss.2025.112563
-
[35]
Sutton and Andrew G
Richard S. Sutton and Andrew G. Barto. 2018.Reinforcement Learning: An Introduction. A Bradford Book, Cambridge, MA, USA
2018
-
[36]
Yuval Tassa, Tom Erez, and Emanuel Todorov. 2012. Synthesis and stabilization of complex behaviors through online trajectory optimization. In2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. 4906–4913. doi:10.1109/IROS.2012.6386025
-
[37]
Mark Towers, Ariel Kwiatkowski, Jordan Terry, John U Balis, Gianluca De Cola, Tristan Deleu, Manuel Goulao, Andreas Kallinteris, Markus Krimmel, Arjun KG, et al. 2024. Gymnasium: A standard interface for reinforcement learning environments.arXiv preprint arXiv:2407.17032(2024)
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[38]
Hado Van Hasselt, Arthur Guez, and David Silver. 2016. Deep reinforcement learning with double q-learning. In Proceedings of the AAAI conference on artificial intelligence, Vol. 30
2016
- [39]
-
[40]
Xiaohui Wan, Tiancheng Li, Weibin Lin, Yi Cai, and Zheng Zheng. 2024. Coverage-guided fuzzing for deep reinforcement learning systems.Journal of Systems and Software210 (2024), 111963
2024
-
[41]
Cathy Wu, Abdul Rahman Kreidieh, Kanaad Parvate, Eugene Vinitsky, and Alexandre M Bayen. 2021. Flow: A modular learning framework for mixed autonomy traffic.IEEE Transactions on Robotics38, 2 (2021), 1270–1286
2021
-
[42]
Hitoshi Yoshioka and Hirotada Hashimoto. 2024. A Reliability Quantification Method for Deep Reinforcement Learning-Based Control.Algorithms17, 7 (2024). doi:10.3390/a17070314
-
[43]
Amirhossein Zolfagharian, Manel Abdellatif, Lionel C Briand, Mojtaba Bagherzadeh, and S Ramesh. 2023. A search- based testing approach for deep reinforcement learning agents.IEEE Transactions on Software Engineering49, 7 (2023), 3715–3735. Received 2026-02-24; accepted 2026-03-24 Proc. ACM Softw. Eng., Vol. 3, No. FSE, Article FSE178. Publication date: July 2026
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.