LLM-Evolved Pattern Generators for Optimal Classical Planning
Pith reviewed 2026-06-28 14:10 UTC · model grok-4.3
The pith
LLM-evolved programs generate pattern collections that induce admissible heuristics matching baseline coverage while evaluating states faster.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
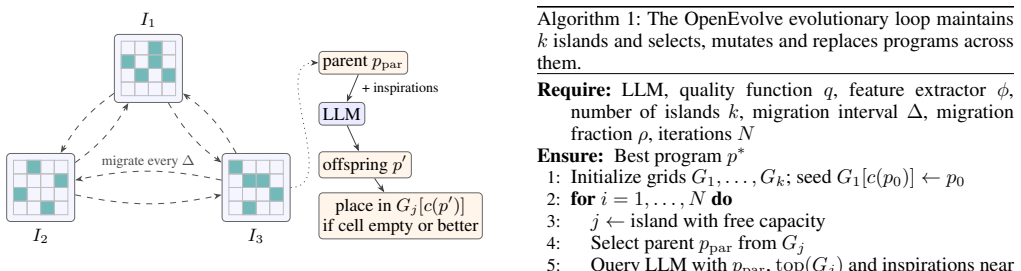
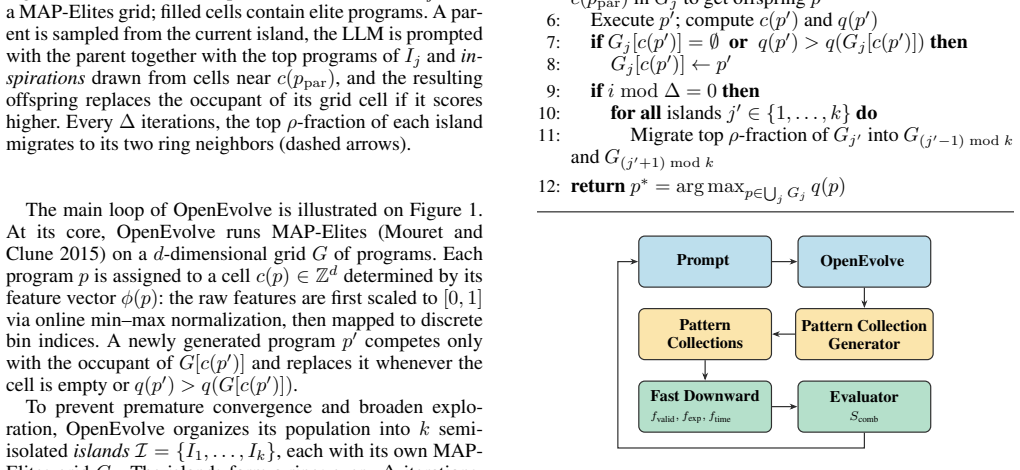
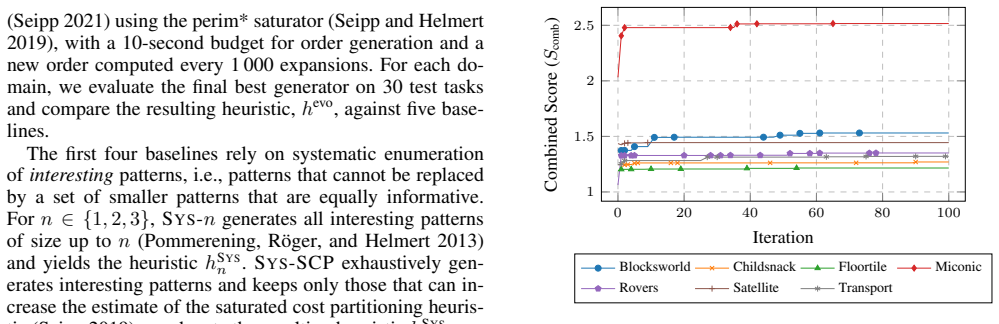
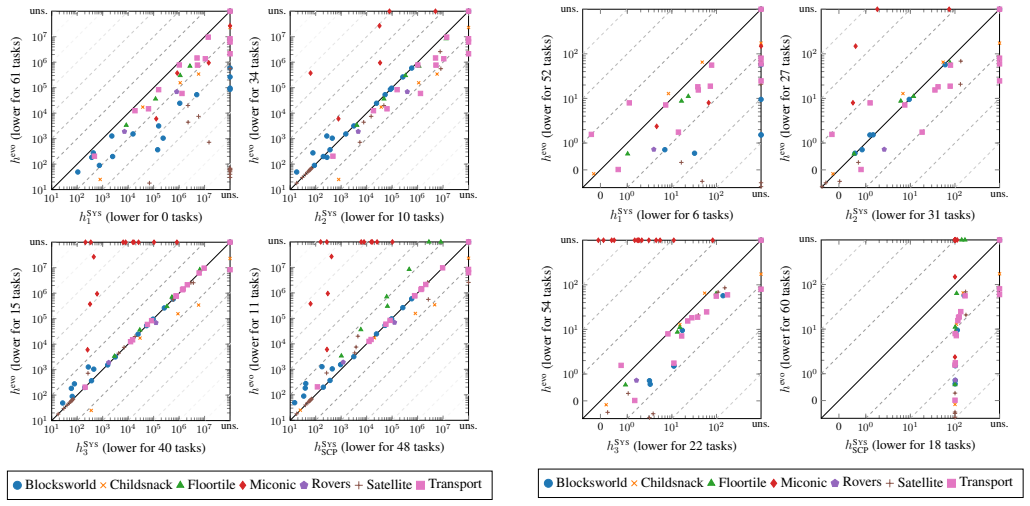
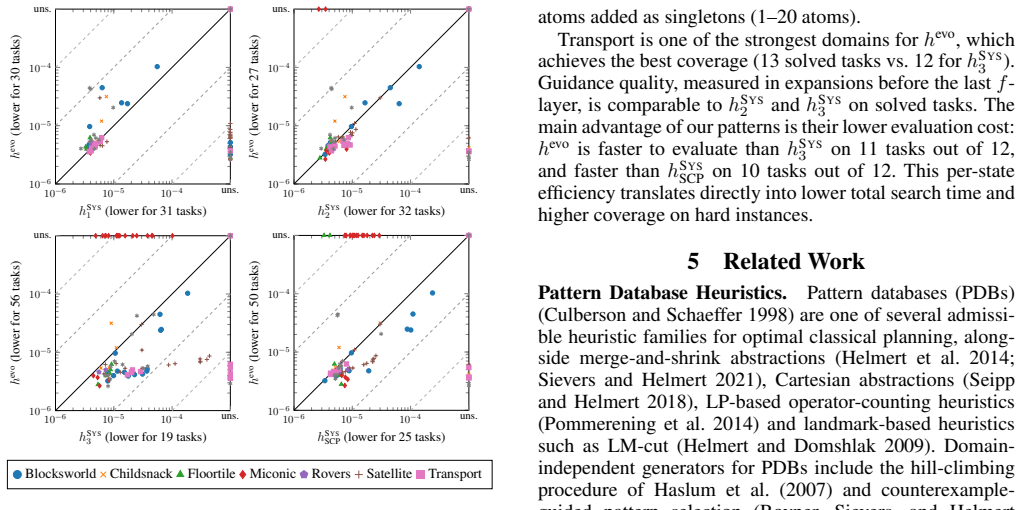
The central claim is that an LLM-driven evolutionary program-synthesis framework can produce, for each planning domain, a program that outputs a pattern collection for any task in that domain; when the resulting patterns are combined admissibly via saturated cost partitioning, the induced heuristics match the coverage of state-of-the-art domain-independent baselines while evaluating each state substantially faster and preserving optimality guarantees.
What carries the argument
An LLM-driven evolutionary program-synthesis framework that evolves programs producing pattern collections, which are then combined via saturated cost partitioning to form admissible heuristics.
If this is right
- The learned programs encode interpretable domain-specific insights.
- The heuristics incur negligible overhead at test time.
- They match the coverage of state-of-the-art domain-independent baselines on several domains.
- Each state is evaluated substantially faster than with the baselines.
Where Pith is reading between the lines
- The same synthesis loop could be applied to other search settings that require admissible estimates, such as certain scheduling or verification tasks.
- Because the programs are explicit, they might be inspected or edited by humans to inject additional domain knowledge.
- Success on more domains would reduce dependence on hand-engineered domain-independent heuristics in planning systems.
- Failure on a domain would point to limits in the current evolutionary operators or prompt design rather than in the admissibility guarantee itself.
Load-bearing premise
An LLM-driven evolutionary program-synthesis framework can reliably obtain, for each domain, a program that produces a pattern collection yielding competitive admissible heuristics.
What would settle it
Finding even one domain where the evolved programs produce heuristics with lower coverage than the baselines or that return non-admissible values on some tasks would falsify the central claim.
Figures
read the original abstract
Learned heuristics have recently become a competitive alternative to traditional domain-independent heuristics for satisficing planning. Existing approaches, however, focus on improving search guidance rather than guaranteeing admissibility, which makes them unsuitable for optimal classical planning. We present the first method for learning domain-dependent heuristics that are admissible by design and thus preserve the optimality guarantees of A* search. Instead of learning a direct mapping from states to heuristic values, we learn to construct abstractions that induce admissible heuristics. We use an LLM-driven evolutionary program-synthesis framework to obtain, for each domain, a program that produces a pattern collection for any task in that domain, and we combine the resulting patterns admissibly via saturated cost partitioning. Empirically, the learned programs encode interpretable domain-specific insights, run with negligible overhead at test time and yield heuristics that match the coverage of state-of-the-art domain-independent baselines on several domains while evaluating each state substantially faster.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to introduce the first method for learning domain-dependent admissible heuristics for optimal classical planning. Instead of directly learning state-to-value mappings, it uses an LLM-driven evolutionary program-synthesis framework to discover, per planning domain, a program that generates a pattern collection for any task in that domain; the resulting patterns are then combined admissibly via saturated cost partitioning to yield a heuristic that preserves A* optimality. The abstract reports that the learned programs are interpretable, incur negligible test-time overhead, match the coverage of state-of-the-art domain-independent baselines on several domains, and evaluate states substantially faster.
Significance. If the empirical claims are substantiated, the work would be significant: it demonstrates a route to domain-dependent admissible heuristics that retain optimality guarantees while incorporating learned, interpretable structure. The evolutionary synthesis approach for generating pattern-collection programs is a distinctive technical contribution that could be extended beyond planning.
major comments (2)
- [Experiments] Experiments section: the manuscript states that the learned heuristics 'match the coverage of state-of-the-art domain-independent baselines on several domains while evaluating each state substantially faster,' yet supplies no description of the experimental protocol (domains, instance counts, number of independent runs, statistical tests for coverage or runtime differences, or failure modes). This information is load-bearing for assessing the central empirical claim.
- [Method] Method section: while admissibility of the final heuristic follows from the standard properties of pattern databases and saturated cost partitioning, the paper provides no formal argument or pseudocode establishing that the evolutionary search is guaranteed to terminate with a program that produces valid (i.e., well-formed) pattern collections for every task in the target domain.
minor comments (2)
- [Introduction] The abstract and introduction repeatedly use the phrase 'first method' without a precise comparison table or citation list that distinguishes the new contribution from prior work on learned admissible heuristics or evolutionary program synthesis in planning.
- [Method] Notation for the evolutionary fitness function and the saturated-cost-partitioning combination step is introduced without an explicit equation or algorithm listing, making it difficult to verify reproducibility from the text alone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below.
read point-by-point responses
-
Referee: [Experiments] Experiments section: the manuscript states that the learned heuristics 'match the coverage of state-of-the-art domain-independent baselines on several domains while evaluating each state substantially faster,' yet supplies no description of the experimental protocol (domains, instance counts, number of independent runs, statistical tests for coverage or runtime differences, or failure modes). This information is load-bearing for assessing the central empirical claim.
Authors: We agree that the current manuscript lacks a sufficient description of the experimental protocol. In the revision we will add a dedicated subsection detailing the domains and instance counts, the number of independent runs, the statistical tests applied to coverage and runtime results, and any observed failure modes. revision: yes
-
Referee: [Method] Method section: while admissibility of the final heuristic follows from the standard properties of pattern databases and saturated cost partitioning, the paper provides no formal argument or pseudocode establishing that the evolutionary search is guaranteed to terminate with a program that produces valid (i.e., well-formed) pattern collections for every task in the target domain.
Authors: The evolutionary procedure is stochastic and LLM-driven, so it does not admit a formal termination guarantee that every generated program will be valid. We will nevertheless add pseudocode for the full evolutionary loop together with a description of the validation and rejection steps that discard malformed programs. This clarifies the practical safeguards without claiming an absolute guarantee. revision: partial
Circularity Check
No significant circularity
full rationale
The paper's core derivation is that LLM-evolved programs generate pattern collections whose induced heuristics remain admissible because (a) projections preserve admissibility (standard PDB property) and (b) saturated cost partitioning preserves admissibility (standard operator). These properties are invoked from the planning literature rather than derived inside the paper or via self-citation chains. The evolutionary synthesis step is presented only as a discovery procedure whose output is then evaluated empirically on coverage and runtime; no equation defines a fitted parameter that is later renamed a prediction, and no uniqueness theorem or ansatz is smuggled in. The reported results are therefore falsifiable external measurements rather than algebraic identities of the method's own inputs.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Saturated cost partitioning of multiple pattern databases produces an admissible heuristic.
Reference graph
Works this paper leans on
-
[1]
Communication, Simulation, and Intelligent Agents: Implications of Personal Intelligent Machines for Medical Education
Clancey, William J. Communication, Simulation, and Intelligent Agents: Implications of Personal Intelligent Machines for Medical Education. Proceedings of the Eighth International Joint Conference on Artificial Intelligence (IJCAI-83)
-
[2]
Classification Problem Solving
Clancey, William J. Classification Problem Solving. Proceedings of the Fourth National Conference on Artificial Intelligence
-
[3]
, title =
Robinson, Arthur L. , title =. 1980 , doi =. https://science.sciencemag.org/content/208/4447/1019.full.pdf , journal =
1980
-
[4]
New Ways to Make Microcircuits Smaller---Duplicate Entry
Robinson, Arthur L. New Ways to Make Microcircuits Smaller---Duplicate Entry. Science
-
[5]
International Journal of Man-Machine Studies , volume = 20, number = 1, pages =
Diane Warner Hasling and William J. Clancey and Glenn Rennels , abstract =. Strategic explanations for a diagnostic consultation system , journal =. 1984 , issn =. doi:https://doi.org/10.1016/S0020-7373(84)80003-6 , url =
-
[6]
and Rennels, Glenn R
Hasling, Diane Warner and Clancey, William J. and Rennels, Glenn R. and Test, Thomas. Strategic Explanations in Consultation---Duplicate. The International Journal of Man-Machine Studies
-
[7]
Poligon: A System for Parallel Problem Solving
Rice, James. Poligon: A System for Parallel Problem Solving
-
[8]
Transfer of Rule-Based Expertise through a Tutorial Dialogue
Clancey, William J. Transfer of Rule-Based Expertise through a Tutorial Dialogue
-
[9]
The Engineering of Qualitative Models
Clancey, William J. The Engineering of Qualitative Models
-
[10]
2017 , eprint=
Attention Is All You Need , author=. 2017 , eprint=
2017
-
[11]
Pluto: The 'Other' Red Planet
NASA. Pluto: The 'Other' Red Planet
-
[12]
Proc.\ AAAI 1991
Proc.\ AAAI 1991. Proc.\ AAAI 1991. 1991
1991
-
[13]
Proc.\ AAAI 1993
Proc.\ AAAI 1993. Proc.\ AAAI 1993. 1993
1993
-
[14]
Proc.\ AAAI 1994
Proc.\ AAAI 1994. Proc.\ AAAI 1994. 1994
1994
-
[15]
Proc.\ AAAI 1996
Proc.\ AAAI 1996. Proc.\ AAAI 1996. 1996
1996
-
[16]
Proc.\ AAAI 1997
Proc.\ AAAI 1997. Proc.\ AAAI 1997. 1997
1997
-
[17]
Proc.\ AAAI 1998
Proc.\ AAAI 1998. Proc.\ AAAI 1998. 1998
1998
-
[18]
Proc.\ AAAI 1999
Proc.\ AAAI 1999. Proc.\ AAAI 1999. 1999
1999
-
[19]
Proc.\ AAAI 2000
Proc.\ AAAI 2000. Proc.\ AAAI 2000. 2000
2000
-
[20]
Proc.\ AAAI 2002
Proc.\ AAAI 2002. Proc.\ AAAI 2002. 2002
2002
-
[21]
Proc.\ AAAI 2004
Proc.\ AAAI 2004. Proc.\ AAAI 2004. 2004
2004
-
[22]
Proc.\ AAAI 2005
Proc.\ AAAI 2005. Proc.\ AAAI 2005. 2005
2005
-
[23]
Proc.\ AAAI 2006
Proc.\ AAAI 2006. Proc.\ AAAI 2006. 2006
2006
-
[24]
AAAI 2006 Workshop on Learning for Search
AAAI 2006 Workshop on Learning for Search. AAAI 2006 Workshop on Learning for Search. 2006
2006
-
[25]
Proc.\ AAAI 2007
Proc.\ AAAI 2007. Proc.\ AAAI 2007. 2007
2007
-
[26]
Proc.\ AAAI 2008
Proc.\ AAAI 2008. Proc.\ AAAI 2008. 2008
2008
-
[27]
AAAI 2008 Workshop on Search in Artificial Intelligence and Robotics
AAAI 2008 Workshop on Search in Artificial Intelligence and Robotics. AAAI 2008 Workshop on Search in Artificial Intelligence and Robotics. 2008
2008
-
[28]
Proc.\ AAAI 2010
Proc.\ AAAI 2010. Proc.\ AAAI 2010. 2010
2010
-
[29]
Proc.\ AAAI 2011
Proc.\ AAAI 2011. Proc.\ AAAI 2011. 2011
2011
-
[30]
Proc.\ AAAI 2012
Proc.\ AAAI 2012. Proc.\ AAAI 2012. 2012
2012
-
[31]
AAAI 2012 Workshop on Problem Solving Using Classical Planners
AAAI 2012 Workshop on Problem Solving Using Classical Planners. AAAI 2012 Workshop on Problem Solving Using Classical Planners. 2012
2012
-
[32]
Proc.\ AAAI 2013
Proc.\ AAAI 2013. Proc.\ AAAI 2013. 2013
2013
-
[33]
Proc.\ AAAI 2013 Late-Breaking Papers
Proc.\ AAAI 2013 Late-Breaking Papers. Proc.\ AAAI 2013 Late-Breaking Papers. 2013
2013
-
[34]
Proc.\ AAAI 2014
Proc.\ AAAI 2014. Proc.\ AAAI 2014. 2014
2014
-
[35]
Proc.\ AAAI 2015
Proc.\ AAAI 2015. Proc.\ AAAI 2015. 2015
2015
-
[36]
AAAI 2015 Workshop on Planning, Search, and Optimization
AAAI 2015 Workshop on Planning, Search, and Optimization. AAAI 2015 Workshop on Planning, Search, and Optimization. 2015
2015
-
[37]
Proc.\ AAAI 2016
Proc.\ AAAI 2016. Proc.\ AAAI 2016. 2016
2016
-
[38]
Proc.\ AAAI 2017
Proc.\ AAAI 2017. Proc.\ AAAI 2017. 2017
2017
-
[39]
Proc.\ AAAI 2018
Proc.\ AAAI 2018. Proc.\ AAAI 2018. 2018
2018
-
[40]
Proc.\ AAAI 2019
Proc.\ AAAI 2019. Proc.\ AAAI 2019. 2019
2019
-
[41]
Proc.\ AAAI 2020
Proc.\ AAAI 2020. Proc.\ AAAI 2020. 2020
2020
-
[42]
Proc.\ AAAI 2021
Proc.\ AAAI 2021. Proc.\ AAAI 2021. 2021
2021
-
[43]
Proc.\ AAAI 2022
Proc.\ AAAI 2022. Proc.\ AAAI 2022. 2022
2022
-
[44]
Proc.\ AAAI 2023
Proc.\ AAAI 2023. Proc.\ AAAI 2023. 2023
2023
-
[45]
Proc.\ AAAI 2024
Proc.\ AAAI 2024. Proc.\ AAAI 2024. 2024
2024
-
[46]
Proc.\ AAAI 2025
Proc.\ AAAI 2025. Proc.\ AAAI 2025. 2025
2025
-
[47]
Proc.\ AAAI 2026
Proc.\ AAAI 2026. Proc.\ AAAI 2026. 2026
2026
-
[48]
Proc.\ AAMAS 2010
Proc.\ AAMAS 2010. Proc.\ AAMAS 2010. 2010
2010
-
[49]
Proc.\ AAMAS 2013
Proc.\ AAMAS 2013. Proc.\ AAMAS 2013. 2013
2013
-
[50]
Proc.\ AAMAS 2014
Proc.\ AAMAS 2014. Proc.\ AAMAS 2014. 2014
2014
-
[51]
Proc.\ AAMAS 2016
Proc.\ AAMAS 2016. Proc.\ AAMAS 2016. 2016
2016
-
[52]
Proc.\ AAMAS 2024
Proc.\ AAMAS 2024. Proc.\ AAMAS 2024. 2024
2024
-
[53]
Proc.\ AI 2013
Proc.\ AI 2013. Proc.\ AI 2013. 2013
2013
-
[54]
Proc.\ AIIDE 2015
Proc.\ AIIDE 2015. Proc.\ AIIDE 2015. 2015
2015
-
[55]
Proc.\ AIPS 1992
Proc.\ AIPS 1992. Proc.\ AIPS 1992. 1992
1992
-
[56]
Proc.\ AIPS 1996
Proc.\ AIPS 1996. Proc.\ AIPS 1996. 1996
1996
-
[57]
Proc.\ AIPS 2000
Proc.\ AIPS 2000. Proc.\ AIPS 2000. 2000
2000
-
[58]
AIPS 2000 Workshop on Analyzing and Exploiting Domain Knowledge for Efficient Planning
AIPS 2000 Workshop on Analyzing and Exploiting Domain Knowledge for Efficient Planning. AIPS 2000 Workshop on Analyzing and Exploiting Domain Knowledge for Efficient Planning. 2000
2000
-
[59]
AIPS 2000 Workshop on Model-Theoretic Approaches to Planning
AIPS 2000 Workshop on Model-Theoretic Approaches to Planning. AIPS 2000 Workshop on Model-Theoretic Approaches to Planning. 2000
2000
-
[60]
Proc.\ AIPS 2002
Proc.\ AIPS 2002. Proc.\ AIPS 2002. 2002
2002
-
[61]
Proc.\ AISTATS 2013
Proc.\ AISTATS 2013. Proc.\ AISTATS 2013. 2013
2013
-
[62]
Proc.\ AISTATS 2014
Proc.\ AISTATS 2014. Proc.\ AISTATS 2014. 2014
2014
-
[63]
Proc.\ ALENEX 2007
Proc.\ ALENEX 2007. Proc.\ ALENEX 2007. 2007
2007
-
[64]
Algorithmics of Large and Complex Networks
Algorithmics of Large and Complex Networks. Algorithmics of Large and Complex Networks. 2009
2009
-
[65]
Proc.\ ASE 2022
Proc.\ ASE 2022. Proc.\ ASE 2022. 2022
2022
-
[66]
Proc.\ ATVA 2009
Proc.\ ATVA 2009. Proc.\ ATVA 2009. 2009
2009
-
[67]
AVoCS 2004
Proc. AVoCS 2004. Proc. AVoCS 2004. 2004
2004
-
[68]
Proc.\ CAI 2018
Proc.\ CAI 2018. Proc.\ CAI 2018. 2018
2018
-
[69]
Proc.\ CAV 1992
Proc.\ CAV 1992. Proc.\ CAV 1992. 1992
1992
-
[70]
Proc.\ CAV 1993
Proc.\ CAV 1993. Proc.\ CAV 1993. 1993
1993
-
[71]
Proc.\ CAV 2000
Proc.\ CAV 2000. Proc.\ CAV 2000. 2000
2000
-
[72]
Proc.\ CAV 2002
Proc.\ CAV 2002. Proc.\ CAV 2002. 2002
2002
-
[73]
Proc.\ CAV 2008
Proc.\ CAV 2008. Proc.\ CAV 2008. 2008
2008
-
[74]
Proc.\ CAV 2009
Proc.\ CAV 2009. Proc.\ CAV 2009. 2009
2009
-
[75]
Proc.\ CAV 2010
Proc.\ CAV 2010. Proc.\ CAV 2010. 2010
2010
-
[76]
Proc.\ CAV 2021, Part II
Proc.\ CAV 2021, Part II. Proc.\ CAV 2021, Part II. 2021
2021
-
[77]
Proc.\ CAV 2025, Part I
Proc.\ CAV 2025, Part I. Proc.\ CAV 2025, Part I. 2025
2025
-
[78]
Proc.\ CIG 2008
Proc.\ CIG 2008. Proc.\ CIG 2008. 2008
2008
-
[79]
Proc.\ CoCoMile 2012
Proc.\ CoCoMile 2012. Proc.\ CoCoMile 2012. 2012
2012
-
[80]
1st CoRe Challenge: Solver and Graph Descriptions
1st CoRe Challenge: Solver and Graph Descriptions. 1st CoRe Challenge: Solver and Graph Descriptions. 2022
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.