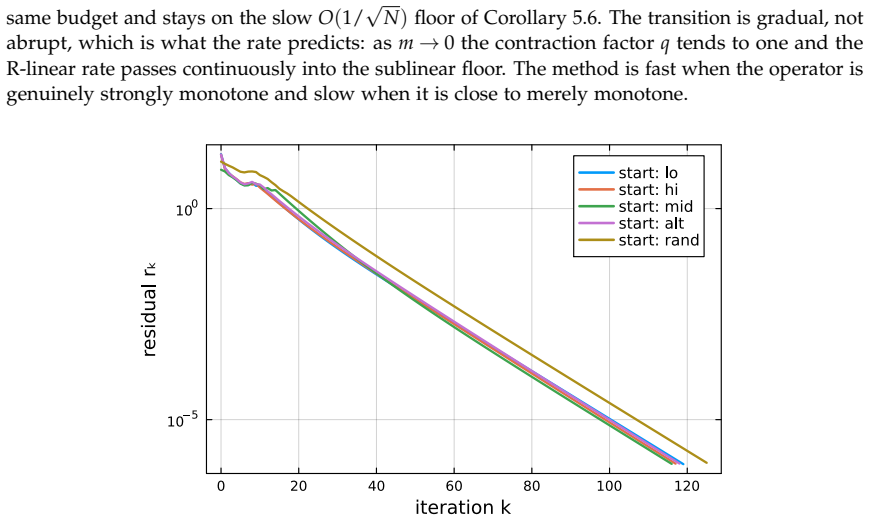
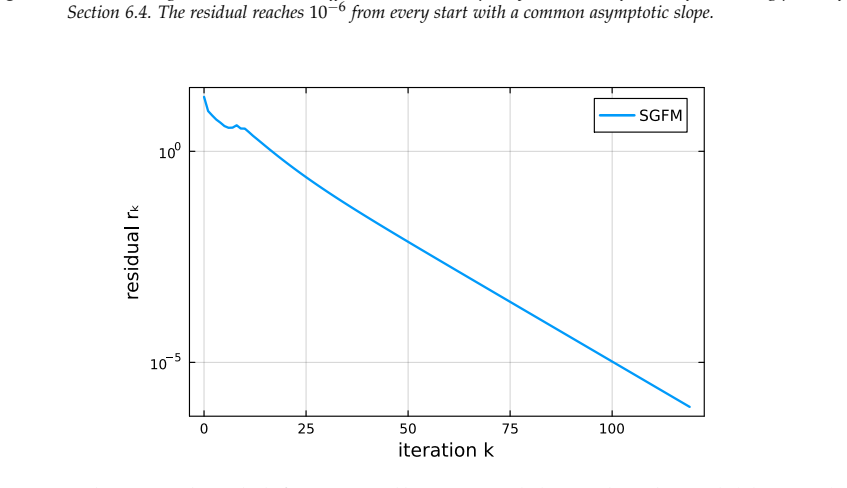
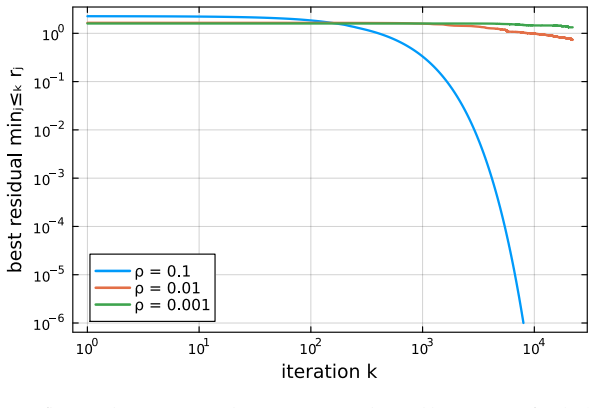
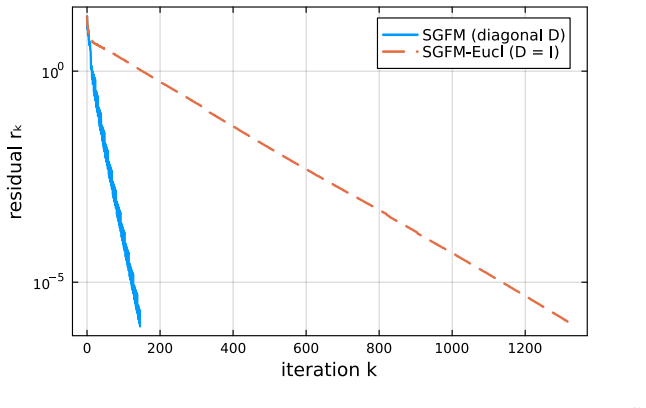
A Variable-Metric Non-monotone Line Search Method for Mixed Variational Inequalities and Equilibrium Problems
Pith reviewed 2026-06-26 07:57 UTC · model grok-4.3
The pith
A variable-metric scaled projection step that coincides with the Fukushima gap maximizer drives global convergence and R-linear rate for strongly monotone variational inequalities.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The scaled projection step is exactly the maximizer that defines the Fukushima regularized gap, so the search direction is simultaneously the algorithmic step and the gap-defining direction. For variational and mixed variational inequalities with a strongly monotone, Lipschitz operator the method therefore converges globally and at an R-linear rate under a fixed or controlled-change variable metric; the rate follows from the strong-monotonicity contraction and the resulting explicit gap error bound. For equilibrium problems the method yields global convergence together with a gap error bound.
What carries the argument
The variable-metric scaled projection step, which is simultaneously the algorithmic update and the maximizer of the Fukushima regularized gap function.
If this is right
- The method converges globally to a solution of variational inequalities, mixed variational inequalities, and equilibrium problems.
- An R-linear rate holds whenever the operator is strongly monotone and Lipschitz continuous.
- An explicit gap error bound follows from the contraction induced by strong monotonicity.
- The convergence guarantees remain valid when the variable metric is fixed or changes in a controlled manner.
Where Pith is reading between the lines
- The same structural identity between projection and gap maximizer might be reusable for designing gap-based methods on other classes of equilibrium-type problems not treated in the paper.
- Numerical comparison on ill-conditioned instances could show whether the variable-metric scaling yields practical speed-ups beyond the theoretical guarantees already proved.
Load-bearing premise
The operator that defines the variational inequality must be strongly monotone and Lipschitz continuous.
What would settle it
A concrete instance with a strongly monotone Lipschitz operator on which the observed convergence rate is slower than R-linear, or on which the method fails to converge, would contradict the stated rate and global-convergence claims.
Figures
read the original abstract
We propose a scaled gap-function method for variational inequalities, mixed variational inequalities, and equilibrium problems over a closed convex set. The method drives a gap function to zero by combining a variable-metric scaled projection step with a modified non-monotone Armijo line search. The construction rests on a structural identity: the scaled projection step is exactly the maximizer that defines the Fukushima regularized gap, so the search direction is simultaneously the algorithmic step and the gap-defining direction. For variational and mixed variational inequalities with a strongly monotone, Lipschitz operator we establish global convergence and an R-linear rate, under a fixed or a controlled-change variable metric. The rate follows from the strong-monotonicity contraction and the resulting explicit gap error bound. For equilibrium problems we obtain global convergence and a gap error bound (Mastroeni's gap). Numerical experiments on controlled problems confirm the convergence guarantees and the predicted rate, and compare the method with standard extragradient and gap-descent methods. The combination of variable-metric scaling, a modified non-monotone line search, and gap-function descent appears to be new for these problem classes.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a scaled gap-function method for variational inequalities (VI), mixed variational inequalities (MVI), and equilibrium problems over closed convex sets. It combines a variable-metric scaled projection step (which coincides with the maximizer of the Fukushima regularized gap) with a modified non-monotone Armijo line search. For VI and MVI with strongly monotone Lipschitz operators, global convergence and an R-linear rate are claimed under fixed or controlled-change variable metrics, with the rate derived from the strong-monotonicity contraction and an explicit gap error bound. For equilibrium problems, global convergence and a gap error bound are established. Numerical experiments on controlled problems validate the claims and compare against extragradient and gap-descent methods.
Significance. If the stated convergence results hold, the work contributes a new algorithmic framework that integrates variable-metric scaling, non-monotone line search, and gap-function descent for these problem classes. The structural identity between the scaled projection and the gap maximizer is a useful observation that enables the descent and rate arguments. The numerical validation and explicit rate under standard assumptions add practical value.
minor comments (3)
- [Abstract] Abstract: the phrase 'controlled-change variable metric' is used without a precise statement of the condition; this should be defined or referenced to the relevant theorem early in the paper.
- [Numerical experiments] The numerical section would benefit from explicit reporting of the variable-metric update rule and the specific values of the control parameters used in the experiments.
- [Method description] Notation for the gap function and the scaled projection should be introduced consistently before the main algorithmic description.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and recommendation of minor revision. The provided summary correctly reflects the paper's contributions, including the structural identity between the scaled projection and the Fukushima gap maximizer, the convergence and rate results under strong monotonicity, and the numerical comparisons.
Circularity Check
No significant circularity
full rationale
The paper's convergence claims rest on the standard external assumptions of strong monotonicity and Lipschitz continuity of the operator to derive contraction and the explicit gap error bound. The structural identity between the scaled projection and the Fukushima gap maximizer is presented as an algebraic fact enabling the descent direction, not as a self-referential definition. No derivation step reduces a prediction or rate to a fitted parameter or self-citation chain; the analysis is self-contained against these standard operator properties without internal redefinition or load-bearing self-reference.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
From optimization and variational inequalities to equilibrium problems
E. Blum and W. Oettli. “From optimization and variational inequalities to equilibrium problems”.The Mathematics Student63.1-4 (1994), pp. 123–145
1994
-
[2]
F. Facchinei and J.-S. Pang, eds.Finite-Dimensional Variational Inequalities and Complementarity Problems. Springer Series in Operations Research and Financial Engineering. New York, NY: Springer, 2004.doi:10.1007/b97543
-
[3]
Merit functions: a bridge between optimization and equilibria
M. Pappalardo, G. Mastroeni, and M. Passacantando. “Merit functions: a bridge between optimization and equilibria”.4OR12.1 (Mar. 2014), pp. 1–33.doi: 10.1007/s10288-014- 0256-5
-
[4]
The extragradient method for finding saddle points and other problems
G. M. Korpelevich. “The extragradient method for finding saddle points and other problems”. Ekonomika i Matematicheskie Metody12.4 (1976), pp. 747–756
1976
-
[5]
The Subgradient Extragradient Method for Solving Variational Inequalities in Hilbert Space
Y. Censor, A. Gibali, and S. Reich. “The Subgradient Extragradient Method for Solving Variational Inequalities in Hilbert Space”.Journal of Optimization Theory and Applications148.2 (Feb. 2011), pp. 318–335.doi:10.1007/s10957-010-9757-3
-
[6]
A New Projection Method for Variational Inequality Problems
M. V . Solodov and B. F. Svaiter. “A New Projection Method for Variational Inequality Problems”.SIAM Journal on Control and Optimization37.3 (Jan. 1999), pp. 765–776.doi: 10.1137/S0363012997317475
-
[7]
M. Fukushima. “Equivalent differentiable optimization problems and descent methods for asymmetric variational inequality problems”.Mathematical Programming53.1 (Jan. 1992), pp. 99–110.doi:10.1007/BF01585696
-
[8]
Gap Functions for Equilibrium Problems
G. Mastroeni. “Gap Functions for Equilibrium Problems”.Journal of Global Optimization27.4 (Dec. 2003), pp. 411–426.doi:10.1023/A:1026050425030. 32
-
[9]
Q. H. Ansari, F. Babu, D. R. Sahu, and J. C. Yao.A Scaled Gradient Modified Non-monotone Line Search Method for Constrained Optimization Problems. Apr. 2026.doi: 10.48550/arXiv. 2604.28110
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv 2026
-
[10]
A Nonmonotone Line Search Technique and Its Application to Unconstrained Optimization
H. Zhang and W. W. Hager. “A Nonmonotone Line Search Technique and Its Application to Unconstrained Optimization”.SIAM Journal on Optimization14.4 (Jan. 2004), pp. 1043–1056. doi:10.1137/S1052623403428208
-
[11]
Incorporating nonmonotone strategies into the trust region method for unconstrained optimization
N.-z. Gu and J. -t. Mo. “Incorporating nonmonotone strategies into the trust region method for unconstrained optimization”.Computers & Mathematics with Applications55.9 (May 2008), pp. 2158–2172.doi:10.1016/j.camwa.2007.08.038
-
[12]
A memory gradient method based on the nonmonotone technique
Y. Ou and Y. Liu. “A memory gradient method based on the nonmonotone technique”. Journal of Industrial and Management Optimization13.2 (2016), pp. 857–872.doi: 10.3934/ jimo.2016050
2016
-
[13]
Modified nonmonotone Armijo line search for descent method
Z. Shi and S. Wang. “Modified nonmonotone Armijo line search for descent method”. Numerical Algorithms57.1 (May 2011), pp. 1–25.doi:10.1007/s11075-010-9408-7
-
[14]
A Nonmonotone Line Search Technique for Newton’s Method
L. Grippo, F. Lampariello, and S. Lucidi. “A Nonmonotone Line Search Technique for Newton’s Method”.SIAM Journal on Numerical Analysis23.4 (Aug. 1986), pp. 707–716.doi: 10.1137/0723046
-
[15]
A scaled gradient projection method for constrained image deblurring
S. Bonettini, R. Zanella, and L. Zanni. “A scaled gradient projection method for constrained image deblurring”.Inverse Problems25.1 (Jan. 2009), p. 015002.doi: 10.1088/0266-5611/25/ 1/015002
-
[16]
Variable metric forward–backward splitting with applications to monotone inclusions in duality
P . L. Combettes and B. C. V˜u. “Variable metric forward–backward splitting with applications to monotone inclusions in duality”.Optimization63.9 (Sept. 2014), pp. 1289–1318.doi: 10.1080/02331934.2012.733883
-
[17]
An Inertial Forward-Backward Algorithm for Monotone In- clusions
D. A. Lorenz and T. Pock. “An Inertial Forward-Backward Algorithm for Monotone In- clusions”.Journal of Mathematical Imaging and Vision51.2 (Feb. 2015), pp. 311–325.doi: 10.1007/s10851-014-0523-2
-
[18]
C. D. Dang and G. Lan. “On the convergence properties of non-Euclidean extragradient methods for variational inequalities with generalized monotone operators”.Computational Optimization and Applications60.2 (Mar. 2015), pp. 277–310.doi: 10.1007/s10589-014-9673- 9
-
[19]
F. Abdi and F. Shakeri. “A New Descent Method for Symmetric Non-monotone Variational Inequalities with Application to Eigenvalue Complementarity Problems”.Journal of Opti- mization Theory and Applications173.3 (June 2017), pp. 923–940.doi: 10.1007/s10957-017- 1100-9
-
[20]
L. Deng, R. Hu, and Y. Fang.A linesearch projection algorithm for solving equilibrium problems without monotonicity in Hilbert spaces. Mar. 2021.doi:10.48550/arXiv.2006.04022
-
[21]
D-gap functions and descent techniques for solving equilibrium problems
G. Bigi and M. Passacantando. “D-gap functions and descent techniques for solving equilibrium problems”.Journal of Global Optimization62.1 (May 2015), pp. 183–203.doi: 10.1007/s10898-014-0223-x
-
[22]
S. Crisci, F. Porta, V . Ruggiero, and L. Zanni. “On the convergence properties of scaled gradient projection methods with non-monotone Armijo–like line searches”.ANNALI DELL’UNIVERSITA’ DI FERRARA68.2 (Nov. 2022), pp. 521–554.doi: 10.1007/s11565-022- 00437-2
-
[23]
Equivalence of variational inequality problems to unconstrained minimization
J.-M. Peng. “Equivalence of variational inequality problems to unconstrained minimization”. Mathematical Programming78.3 (Sept. 1997), pp. 347–355.doi:10.1007/BF02614360
-
[24]
Unconstrained Optimization Reformulations of Variational Inequality Problems
N. Yamashita, K. Taji, and M. Fukushima. “Unconstrained Optimization Reformulations of Variational Inequality Problems”.Journal of Optimization Theory and Applications92.3 (Mar. 1997), pp. 439–456.doi:10.1023/A:1022660704427
-
[25]
Error bounds in mathematical programming
J.-S. Pang. “Error bounds in mathematical programming”.Mathematical Programming79.1 (Oct. 1997), pp. 299–332.doi:10.1007/BF02614322. 33
-
[26]
M. H. Li, K. W. Meng, and X. Q. Yang. “Kurdyka-Łojasiewicz inequality and error bounds of D-Gap functions for nonsmooth and nonmonotone variational inequality problems”.Journal of Global Optimization93.3 (Nov. 2025), pp. 833–860.doi:10.1007/s10898-025-01558-6
-
[27]
L. Zhao, D. Zhu, and S. Zhang.New Classes of Non-monotone Variational Inequality Problems Solvable via Proximal Gradient on Smooth Gap Functions. Oct. 2025.doi: 10.48550/arXiv.2510. 12105
-
[28]
A. Iusem, F. Lara, R. T. Marcavillaca, and L. H. Yen. “A Two-Step Proximal Point Algorithm for Nonconvex Equilibrium Problems with Applications to Fractional Programming”.Journal of Global Optimization90.3 (Nov. 2024), pp. 755–779.doi:10.1007/s10898-024-01419-8
-
[29]
An extragradient projection method for strongly quasiconvex equilibrium problems with applications
F. Lara, R. T. Marcavillaca, and L. H. Yen. “An extragradient projection method for strongly quasiconvex equilibrium problems with applications”.Computational and Applied Mathematics 43.3 (Mar. 2024), p. 128.doi:10.1007/s40314-024-02626-5
-
[30]
Convergence and error bound of a D-gap function based Newton-type algorithm for equilibrium problems
L. Zhang, S.-Y. Wu, and S.-C. Fang. “Convergence and error bound of a D-gap function based Newton-type algorithm for equilibrium problems”.Journal of Industrial and Management Optimization6.2 (2010), pp. 333–346.doi:10.3934/jimo.2010.6.333
-
[31]
New convergence results for the scaled gradient projection method
S. Bonettini and M. Prato. “New convergence results for the scaled gradient projection method”.Inverse Problems31.9 (Aug. 2015), p. 095008.doi: 10.1088/0266- 5611/31/9/ 095008
-
[32]
H. H. Bauschke and P . L. Combettes.Convex Analysis and Monotone Operator Theory in Hilbert Spaces. CMS Books in Mathematics. Cham: Springer International Publishing, 2017.doi: 10.1007/978-3-319-48311-5
-
[33]
On Strongly Quasiconvex Functions: Existence Results and Proximal Point Algo- rithms
F. Lara. “On Strongly Quasiconvex Functions: Existence Results and Proximal Point Algo- rithms”.Journal of Optimization Theory and Applications192.3 (Mar. 2022), pp. 891–911.doi: 10.1007/s10957-021-01996-8
-
[34]
Extragradient algorithms extended to equilibrium problems
D. Quoc Tran, M. Le Dung, and V . H. Nguyen. “Extragradient algorithms extended to equilibrium problems”.Optimization57.6 (Dec. 2008), pp. 749–776.doi: 10 . 1080 / 02331930601122876
2008
-
[35]
J. M. Ortega and W. C. Rheinboldt.Iterative Solution of Nonlinear Equations in Several Variables. Classics in Applied Mathematics. Society for Industrial and Applied Mathematics, Jan. 2000. doi:10.1137/1.9780898719468
-
[36]
Strongly Quasiconvex Functions: What We Know (So Far)
S.-M. Grad, F. Lara, and R. T. Marcavillaca. “Strongly Quasiconvex Functions: What We Know (So Far)”.Journal of Optimization Theory and Applications205.2 (Mar. 2025), p. 38.doi: 10.1007/s10957-025-02641-4
-
[37]
Extension of newton and quasi-Newton methods to systems of PC1 equations
M. Kojima and S. Shindo. “Extension of newton and quasi-Newton methods to systems of PC1 equations”.Journal of the Operations Research Society of Japan29.4 (1986), pp. 352–375
1986
-
[38]
Dual extragradient algorithms extended to equilibrium problems
T. D. Quoc, P . N. Anh, and L. D. Muu. “Dual extragradient algorithms extended to equilibrium problems”.Journal of Global Optimization52.1 (Jan. 2012), pp. 139–159.doi: 10.1007/s10898-011-9693-2. 34
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.