When Do Conservation Laws Survive Learned Representations? Certified Horizons for Latent World Models
Pith reviewed 2026-06-26 00:30 UTC · model grok-4.3
The pith
Conservation certificates for decoded physical invariants can survive learned representations, but only under certain geometric priors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
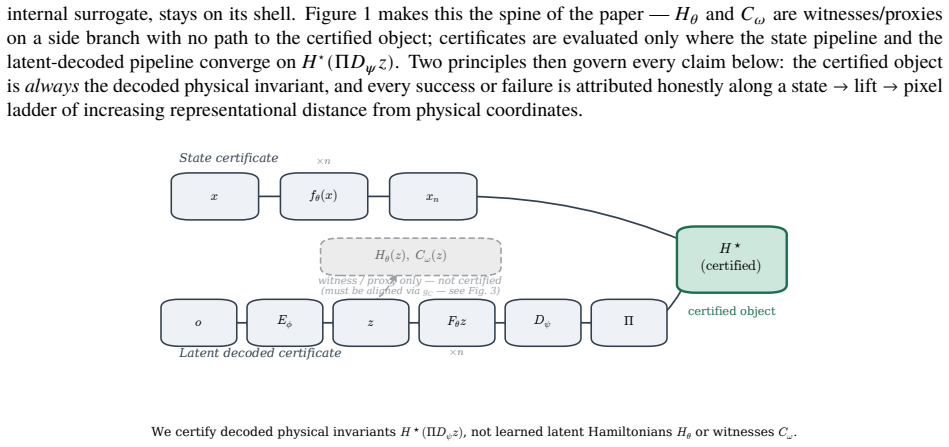
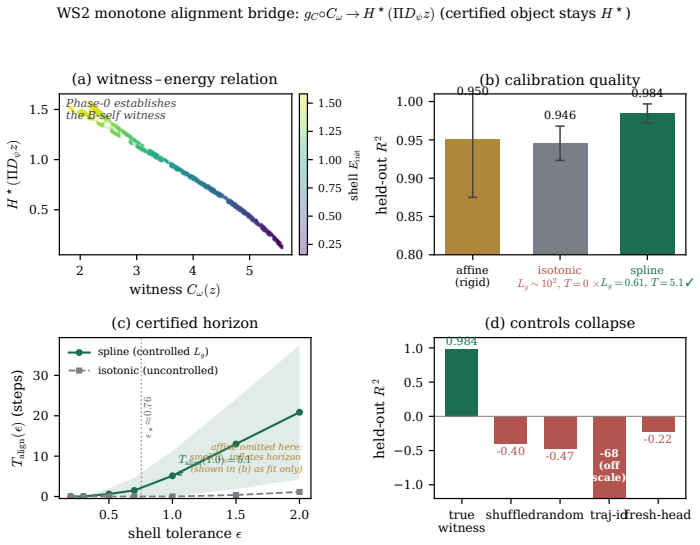
The central claim is that the decoded physical invariant admits shell-horizon certificates whose budget decomposes into representation, readout, and latent-dynamics defects; a monotone alignment bridge converts a soft learned witness into a certified horizon for this decoded object, and the resulting certificates survive representation learning when the witness satisfies controlled Lipschitz alignment, while hard canonical symplectic structure yields longer horizons only in known phase coordinates and does not cross a learned chart.
What carries the argument
The decoded physical invariant together with its shell-horizon certificate, which decomposes defect budgets and uses a monotone alignment bridge from a soft learned witness to bound steps on the invariant level set.
If this is right
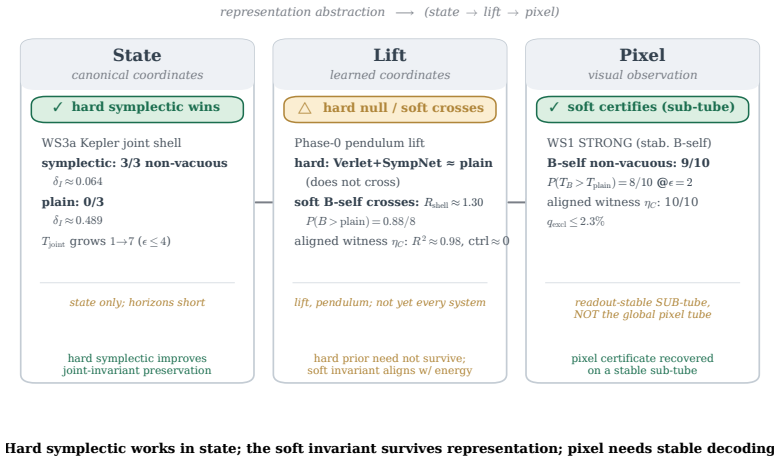
- Hard canonical symplectic structure produces the longest horizons when coordinates are known but does not transfer across a learned chart.
- A controlled-Lipschitz-aligned soft invariant yields surviving certificates in the learned-representation regimes tested.
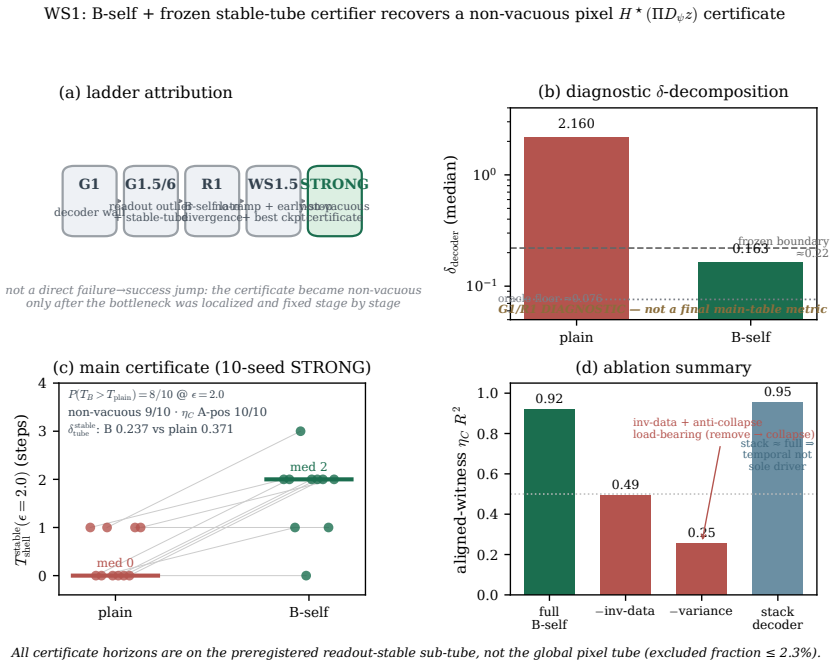
- Pixel-level certification is recovered on a readout-stable sub-tube of the latent space.
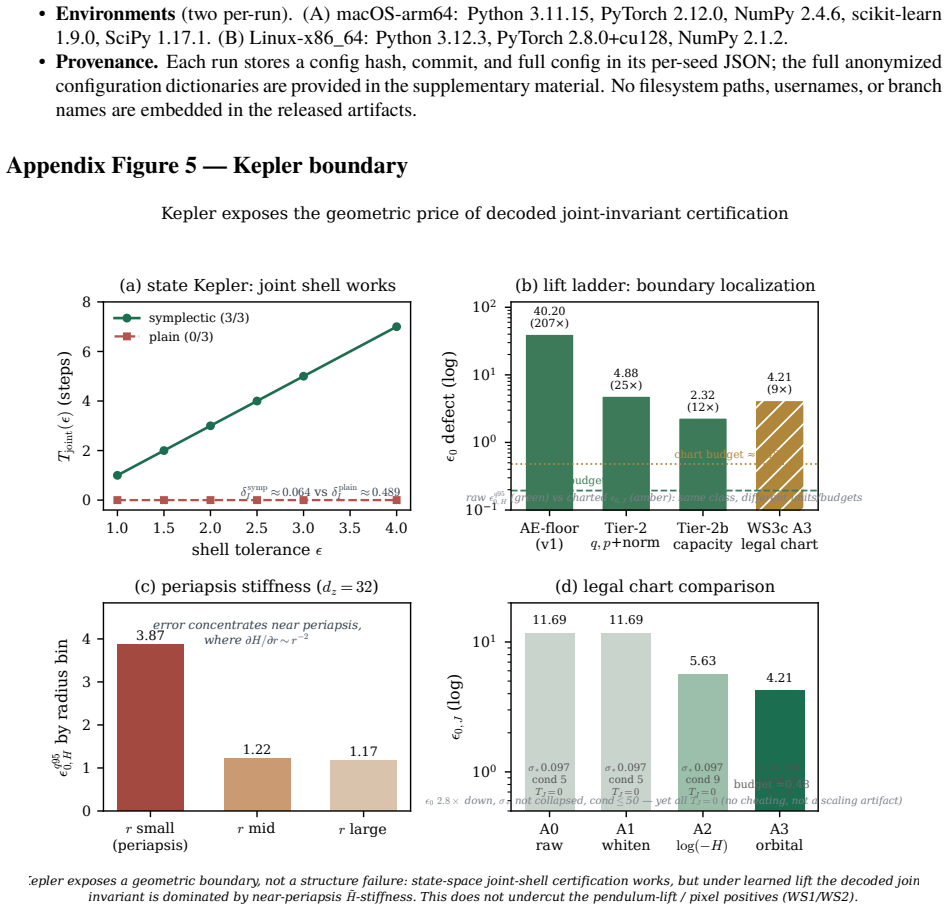
- The Kepler problem exposes a geometric boundary beyond which the certificates cease to apply.
Where Pith is reading between the lines
- The same defect-budget approach could be applied to other known invariants such as momentum or angular momentum without changing the certificate structure.
- Representation-learning objectives could be regularized explicitly by the alignment bridge term to enlarge the certified horizon.
- The method supplies a concrete test for whether a learned model has preserved enough geometry to support long-horizon physical rollouts.
Load-bearing premise
A monotone alignment bridge exists through which a soft learned witness yields a certified horizon for the decoded physical invariant.
What would settle it
An observed rollout in which the decoded invariant drifts beyond the predicted horizon while all measured representation, readout, and latent-dynamics defects remain inside their budgeted limits would falsify the certificate.
Figures
read the original abstract
We ask a representation-learning question about physical world models: when does a conservation law remain certifiable after a model learns a latent representation? A certified horizon bounds -- in advance, from measurable model defects -- how many steps a rollout provably stays on a physical invariant's level set. The key design choice is what is certified: not a learned latent Hamiltonian or a learned scalar witness (a model can conserve either while drifting in true energy), but the decoded physical invariant obtained by decoding the latent state and evaluating the known invariant. Around this object we derive shell-horizon certificates whose budget decomposes into representation, readout, and latent-dynamics defects, with a monotone alignment bridge through which a soft learned witness yields a certified horizon for the decoded invariant, and test them across state, learned-lift, and pixel observations on conservative systems. Conservation certificates can survive learned representation, but not all geometric priors survive equally: hard canonical symplectic structure yields the longest horizons in known phase coordinates yet does not cross a learned chart, whereas a controlled-Lipschitz-aligned soft invariant survives in the learned-representation settings we test; pixel certification is recovered on a readout-stable sub-tube; and the Kepler problem exposes a geometric boundary. The central object is therefore not a latent Hamiltonian, but a decoded physical invariant whose robustness to representation learning can be measured, certified, and falsified.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that conservation laws remain certifiable after representation learning in latent world models when the object is the decoded physical invariant (not a latent Hamiltonian or scalar witness). It derives shell-horizon certificates whose error budget decomposes into representation, readout, and latent-dynamics defects, connected by a monotone alignment bridge that transfers bounds from a controlled-Lipschitz soft learned witness to the decoded invariant; empirical tests across state, learned-lift, and pixel observations on conservative systems show soft invariants survive learned charts while hard canonical symplectic structure does not, with pixel certification recovered on readout-stable sub-tubes and a geometric boundary exposed in the Kepler problem.
Significance. If the derivations and bridge hold, the work supplies a falsifiable, defect-decomposable certification framework for physical invariants under representation learning, distinguishing survival rates of geometric priors and enabling measurement of robustness in latent world models; this is a concrete advance for reliable physics-informed ML.
major comments (1)
- [Abstract] Abstract (monotone alignment bridge paragraph): the central claim requires that a soft learned witness yields a certified horizon for the decoded physical invariant via a monotone alignment bridge whose monotonicity is preserved under nonlinear decoding and learned charts; no explicit conditions on the decoder, representation, or alignment map that guarantee this monotonicity are stated, yet this step is load-bearing for transferring the bound and explaining why hard symplectic structure fails to cross while the soft invariant succeeds.
minor comments (1)
- The abstract supplies no equation numbers, proof sketches, or dataset details, making it impossible to verify whether the stated decompositions and tests support the claims; adding at least one key equation reference would improve verifiability.
Simulated Author's Rebuttal
We thank the referee for the constructive comment on the abstract. The observation correctly identifies that the load-bearing step of the monotone alignment bridge requires explicit conditions to be stated for the claim to be fully rigorous at the summary level. We address this below and will revise the manuscript to improve clarity.
read point-by-point responses
-
Referee: [Abstract] Abstract (monotone alignment bridge paragraph): the central claim requires that a soft learned witness yields a certified horizon for the decoded physical invariant via a monotone alignment bridge whose monotonicity is preserved under nonlinear decoding and learned charts; no explicit conditions on the decoder, representation, or alignment map that guarantee this monotonicity are stated, yet this step is load-bearing for transferring the bound and explaining why hard symplectic structure fails to cross while the soft invariant succeeds.
Authors: We agree that the abstract paragraph is too terse on this point. The main text (Section 4) derives the bridge under three explicit conditions: (i) the alignment map φ is monotone w.r.t. the defect seminorms (Definition 4.2), (ii) the decoder is locally Lipschitz on the readout-stable sub-tube (Assumption 4.3), and (iii) the learned representation preserves the controlled-Lipschitz constant of the soft witness (Lemma 4.4). These together guarantee that monotonicity of the witness defect transfers to the decoded invariant. The hard symplectic structure fails to cross precisely because it admits no such controlled-Lipschitz soft witness under the learned chart. To address the referee's concern we will add a short parenthetical clause to the abstract listing the three conditions and will ensure the abstract cites the relevant theorem. revision: yes
Circularity Check
No circularity: certificates derived from measurable defects with independent content.
full rationale
The provided abstract and description frame the central derivation as producing shell-horizon certificates that decompose into representation/readout/latent-dynamics defects around the decoded physical invariant, using a monotone alignment bridge from a soft learned witness. No quoted equations or self-citations reduce any prediction or certificate to a fitted quantity defined by the same defects, nor do they exhibit self-definition, renaming of known results, or load-bearing uniqueness theorems imported from the authors. The approach is presented as yielding falsifiable bounds from external measurable quantities, keeping the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The physical invariant is known a priori and can be evaluated on decoded states.
invented entities (2)
-
shell-horizon certificate
no independent evidence
-
monotone alignment bridge
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Advances in Neural Information Processing Systems (NeurIPS) , year =
Hamiltonian Neural Networks , author =. Advances in Neural Information Processing Systems (NeurIPS) , year =. 1906.01563 , archivePrefix =
arXiv 1906
-
[2]
International Conference on Learning Representations (ICLR) , year =
Hamiltonian Generative Networks , author =. International Conference on Learning Representations (ICLR) , year =. 1909.13789 , archivePrefix =
arXiv 1909
-
[3]
2020 , eprint =
Jin, Pengzhan and Zhang, Zhen and Zhu, Aiqing and Tang, Yifa and Karniadakis, George Em , journal =. 2020 , eprint =
2020
-
[4]
2006 , doi =
Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations , author =. 2006 , doi =
2006
-
[5]
SIAM Journal on Numerical Analysis , volume =
Backward error analysis for numerical integrators , author =. SIAM Journal on Numerical Analysis , volume =
-
[6]
2021 , eprint =
Satorras, V\'ictor Garcia and Hoogeboom, Emiel and Welling, Max , booktitle =. 2021 , eprint =
2021
-
[7]
International Conference on Machine Learning (ICML) , year =
Group Equivariant Convolutional Networks , author =. International Conference on Machine Learning (ICML) , year =. 1602.07576 , archivePrefix =
-
[8]
and Kawaguchi, Kenji and Finn, Chelsea , booktitle =
Alet, Ferran and Doblar, Dylan and Zhou, Allan and Tenenbaum, Joshua B. and Kawaguchi, Kenji and Finn, Chelsea , booktitle =. 2021 , eprint =
2021
-
[9]
IEEE Conference on Decision and Control (CDC) , year =
Discovering conservation laws from data for control , author =. IEEE Conference on Decision and Control (CDC) , year =. 1811.00961 , archivePrefix =
-
[10]
Nature Communications , volume =
Deep learning for universal linear embeddings of nonlinear dynamics , author =. Nature Communications , volume =. 2018 , eprint =
2018
-
[11]
2021 , eprint =
A Gentle Introduction to Conformal Prediction and Distribution-Free Uncertainty Quantification , author =. 2021 , eprint =
2021
-
[12]
2026 , eprint =
Certified World Models: Predictability Across Configuration, Horizon, and Resolution , author =. 2026 , eprint =
2026
-
[13]
Tenenbaum, Kenji Kawaguchi, and Chelsea Finn
Ferran Alet, Dylan Doblar, Allan Zhou, Joshua B. Tenenbaum, Kenji Kawaguchi, and Chelsea Finn. Noether networks: Meta-learning useful conserved quantities. In Advances in Neural Information Processing Systems (NeurIPS), 2021
2021
-
[14]
Angelopoulos and Stephen Bates
Anastasios N. Angelopoulos and Stephen Bates. A gentle introduction to conformal prediction and distribution-free uncertainty quantification, 2021
2021
-
[15]
Cohen and Max Welling
Taco S. Cohen and Max Welling. Group equivariant convolutional networks. In International Conference on Machine Learning (ICML), 2016
2016
-
[16]
Hamiltonian neural networks
Sam Greydanus, Misko Dzamba, and Jason Yosinski. Hamiltonian neural networks. In Advances in Neural Information Processing Systems (NeurIPS), 2019
2019
-
[17]
Ernst Hairer, Christian Lubich, and Gerhard Wanner. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations. Springer Series in Computational Mathematics. Springer, 2nd edition, 2006. doi:10.1007/3-540-30666-8
-
[18]
SympNets : Intrinsic structure-preserving symplectic networks for identifying hamiltonian systems
Pengzhan Jin, Zhen Zhang, Aiqing Zhu, Yifa Tang, and George Em Karniadakis. SympNets : Intrinsic structure-preserving symplectic networks for identifying hamiltonian systems. Neural Networks, 2020. doi:10.1016/j.neunet.2020.08.017
-
[19]
Nathan Kutz, and Steven L
Eurika Kaiser, J. Nathan Kutz, and Steven L. Brunton. Discovering conservation laws from data for control. In IEEE Conference on Decision and Control (CDC), 2018
2018
-
[20]
Nathan Kutz, and Steven L
Bethany Lusch, J. Nathan Kutz, and Steven L. Brunton. Deep learning for universal linear embeddings of nonlinear dynamics. Nature Communications, 9 0 (1): 0 4950, 2018
2018
-
[21]
Backward error analysis for numerical integrators
Sebastian Reich. Backward error analysis for numerical integrators. SIAM Journal on Numerical Analysis, 36 0 (5): 0 1549--1570, 1999
1999
-
[22]
E(n) equivariant graph neural networks
V\'ictor Garcia Satorras, Emiel Hoogeboom, and Max Welling. E(n) equivariant graph neural networks. In International Conference on Machine Learning (ICML), 2021
2021
-
[23]
Rezende, Andrew Jaegle, S\'ebastien Racani\`ere, Aleksandar Botev, and Irina Higgins
Peter Toth, Danilo J. Rezende, Andrew Jaegle, S\'ebastien Racani\`ere, Aleksandar Botev, and Irina Higgins. Hamiltonian generative networks. In International Conference on Learning Representations (ICLR), 2020
2020
-
[24]
Certified world models: Predictability across configuration, horizon, and resolution, 2026
Hongbo Wang. Certified world models: Predictability across configuration, horizon, and resolution, 2026
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.