Deep Learning-Based Lunar Crater Terrain Relative Navigation
Pith reviewed 2026-06-27 10:03 UTC · model grok-4.3
The pith
A deep learning crater detector matched to a database and fed into an EKF recovers lunar spacecraft position to a few hundred meters even from a 5 km initial error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
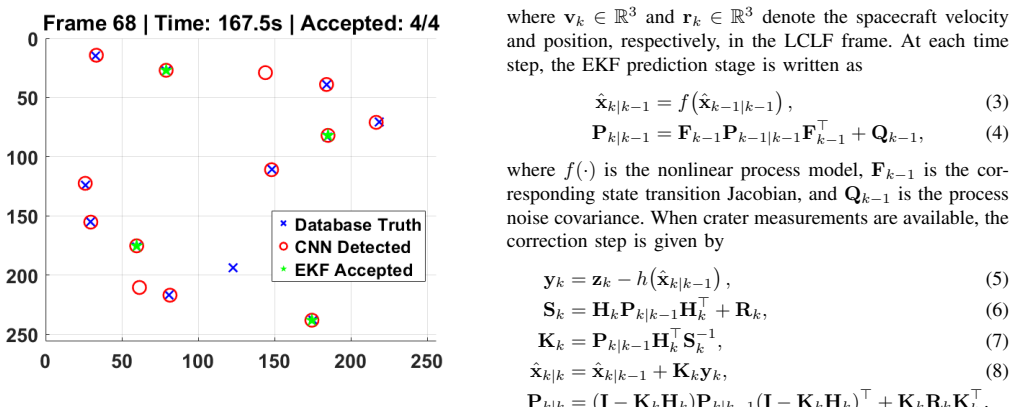
Core claim
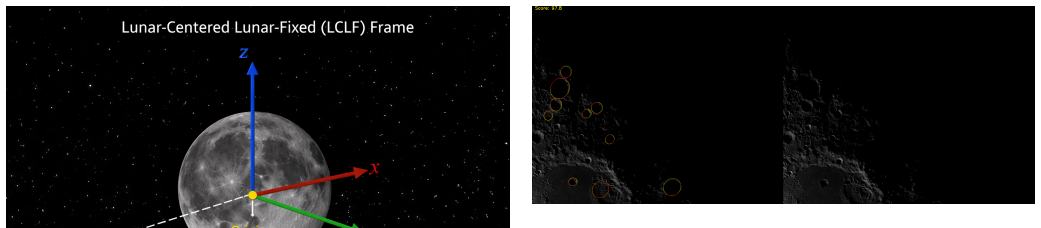
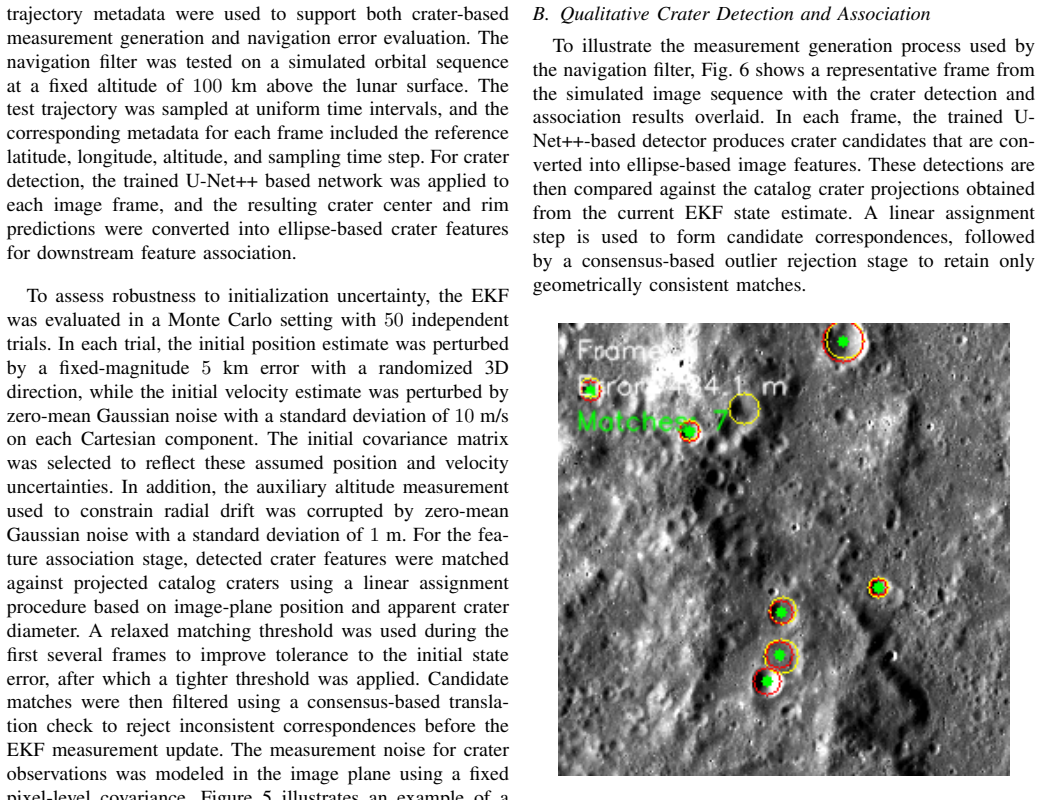
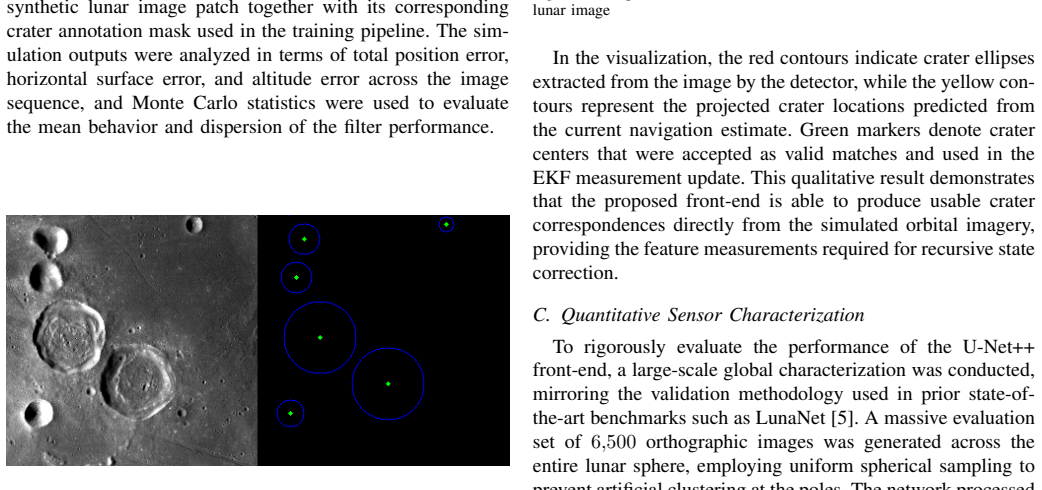
Our deep-learning crater detector analyzes crater features from monocular images acquired from orbit, their matches with craters from a global database are identified via a Hungarian assignment approach followed by the consensus-based outliers removal method, and the estimated measurements are then used to refine an EKF where spacecraft pose estimation in the Lunar-Centered Lunar-Fixed frame of reference, augmented with altitude aiding information, constrains radial drift, achieving navigation error reduction to a few hundred meters from initial errors up to 5 km in simulations.
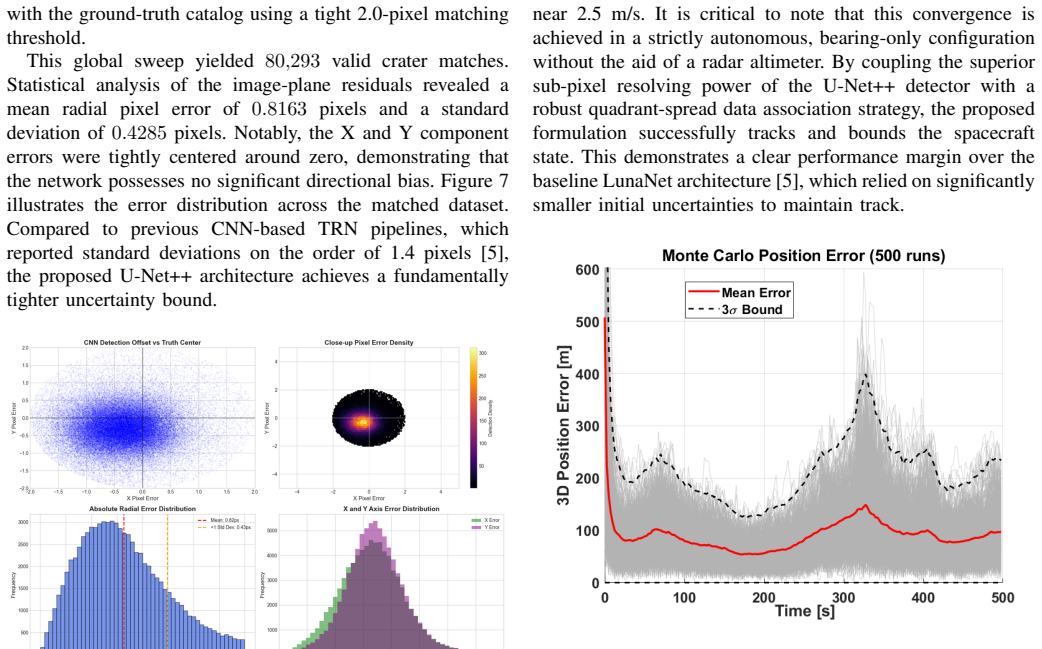
What carries the argument
Deep-learning crater detector whose outputs are matched to a global database by Hungarian assignment plus consensus outlier removal and then supplied to an extended Kalman filter augmented with altitude aiding in the lunar-centered lunar-fixed frame.
If this is right
- Spacecraft can obtain usable position updates during lunar orbit using only monocular cameras and a pre-existing crater catalog.
- Initial position uncertainty of several kilometers can be reduced without external navigation aids.
- Altitude measurements combined with crater matches constrain the radial component of the navigation error.
- The system operates in the lunar-centered lunar-fixed frame and therefore produces estimates directly usable for landing guidance.
Where Pith is reading between the lines
- The same detection-plus-matching pipeline could be retrained for other cratered surfaces such as Mars without changing the EKF structure.
- Performance would degrade on real flight imagery if the camera parameters or lighting conditions fall outside the training distribution.
- Adding a second sensor modality such as lidar range would relax the strict requirement that image scale exactly match the training set.
Load-bearing premise
The images supplied to the detector must have the same resolution and scale distribution as the images used during training, otherwise crater correspondences cannot be maintained reliably.
What would settle it
Apply the full pipeline to a set of orbital images whose resolution or crater sizes differ substantially from the training distribution and check whether the reported position error stays above several kilometers instead of dropping to hundreds of meters.
Figures
read the original abstract
Accurate position estimation is crucial for the successful implementation of future lunar landings using autonomous vehicles, especially in dangerous environments with sparse terrain features. In this paper, we propose a terrain relative navigation (TRN) algorithm combining our deep-learning crater detector, which was designed specifically for the NASA Crater Detection Challenge problem, and an Extended Kalman Filter (EKF). Our detector analyzes crater features from the monocular images acquired from orbit, and their matches with craters from a global database are identified via a Hungarian assignment approach followed by the consensus-based outliers removal method. The estimated measurements are then used to refine an EKF, where spacecraft pose estimation in the Lunar-Centered Lunar-Fixed (LCLF) frame of reference, augmented with altitude aiding information, constrains radial drift. The simulation results indicate that even if the spacecraft is off from its actual location up to 5 km, TRN could recover from this situation, achieving navigation error reduction to a few hundred meters. It should be noted that in order to maintain crater feature correspondences, it is important to match the image resolution and the scales within the scene to the detector training set distribution.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a terrain-relative navigation (TRN) algorithm for lunar spacecraft that combines a deep-learning crater detector (trained for the NASA Crater Detection Challenge) with an Extended Kalman Filter (EKF). Crater detections from monocular orbital images are matched to a global database using the Hungarian algorithm followed by consensus-based outlier removal; the resulting measurements update an EKF whose state is expressed in the Lunar-Centered Lunar-Fixed frame and is augmented with altitude information to constrain radial drift. The central empirical claim is that the filter can recover from initial position errors of up to 5 km, converging to navigation errors of only a few hundred meters, provided that image scale and resolution remain consistent with the detector’s training distribution.
Significance. Should the reported recovery performance be substantiated by detailed simulation protocols and sensitivity tests, the work would offer a concrete demonstration of learned-feature TRN that could support autonomous lunar landing in regions with sparse natural landmarks. The combination of a challenge-specific detector with standard EKF and assignment methods is a pragmatic engineering contribution.
major comments (2)
- [Abstract (simulation-results paragraph)] Abstract (simulation-results paragraph): The headline claim that TRN recovers from a 5 km initial offset to a few hundred meters rests on the EKF receiving usable crater measurements. The text explicitly notes that correspondences require matching image resolution and scene scale to the training distribution, yet the reported simulations supply no information on how scale was controlled or varied when the initial state error is large enough to change apparent crater diameters. Without such detail or an accompanying sensitivity study, it is impossible to assess whether the reported convergence is robust or an artifact of scale-matched rendering.
- [Simulation results (throughout)] Simulation results (throughout): No quantitative description is given of the simulation environment, the precise error metrics employed, the number of Monte-Carlo trials, the initial-state covariance, or the validation procedure used to confirm detector performance under the tested conditions. These omissions make the numerical claims difficult to reproduce or compare with prior TRN literature.
minor comments (1)
- [Abstract] The phrase 'Lunar-Centered Lunar-Fixed (LCLF) frame of reference' is introduced without a brief definition or reference; a one-sentence clarification would aid readers unfamiliar with lunar coordinate conventions.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment below and will revise the manuscript to improve the description of the simulation setup and results.
read point-by-point responses
-
Referee: The headline claim that TRN recovers from a 5 km initial offset to a few hundred meters rests on the EKF receiving usable crater measurements. The text explicitly notes that correspondences require matching image resolution and scene scale to the training distribution, yet the reported simulations supply no information on how scale was controlled or varied when the initial state error is large enough to change apparent crater diameters. Without such detail or an accompanying sensitivity study, it is impossible to assess whether the reported convergence is robust or an artifact of scale-matched rendering.
Authors: We agree that the current manuscript lacks explicit details on scale control during simulations with large initial errors. In the revised version, we will expand the simulation description to explain the rendering process used to maintain consistency with the detector training distribution and will add a sensitivity study on scale variations. revision: yes
-
Referee: No quantitative description is given of the simulation environment, the precise error metrics employed, the number of Monte-Carlo trials, the initial-state covariance, or the validation procedure used to confirm detector performance under the tested conditions. These omissions make the numerical claims difficult to reproduce or compare with prior TRN literature.
Authors: We acknowledge these omissions limit reproducibility. The revised manuscript will include a detailed description of the simulation environment, definitions of the error metrics, the number of Monte-Carlo trials, the initial-state covariance, and the detector validation procedure under the tested conditions. revision: yes
Circularity Check
No circularity; standard detector + EKF pipeline with explicit scale-matching assumption
full rationale
The paper applies a pre-trained deep-learning crater detector to monocular images, uses Hungarian assignment plus consensus for correspondences, and feeds measurements into an EKF augmented with altitude aiding. The reported simulation recovery from 5 km offset is presented as an empirical outcome conditional on the explicitly stated requirement that image resolution and scene scales match the detector's training distribution. No equations or steps reduce a claimed prediction to a fitted parameter by construction, no uniqueness theorems are imported via self-citation, and no ansatz is smuggled in. The central result is a simulation demonstration under a disclosed assumption rather than a derivation that is definitionally equivalent to its inputs.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Extended Kalman Filter assumptions hold for the lunar navigation dynamics
- domain assumption Crater detector generalizes to new images if resolution and scale match training set
Reference graph
Works this paper leans on
-
[1]
Guidance Summary and Assessment of the Chang’e-3 Powered Descent and Landing,
S. Li, X. Jiang, and T. Tao, “Guidance Summary and Assessment of the Chang’e-3 Powered Descent and Landing,”Journal of Spacecraft and Rockets, vol.53, pp. 258-277, 2016
2016
-
[2]
On Lunar On-Orbit Vision-Based Navigation: Ter- rain Mapping, Feature Tracking Driven EKF,
L. Singh and S. Lim, “On Lunar On-Orbit Vision-Based Navigation: Ter- rain Mapping, Feature Tracking Driven EKF,”AIAA GNC Conference, 2008
2008
-
[3]
Servadio, S., Parker, W., and Linares, R. (2023). Uncertainty propagation and filtering via the koopman operator in astrodynamics. Journal of Spacecraft and Rockets, 60(5), 1639-1655
2023
-
[4]
”Differential algebra-based mul- tiple gaussian particle filter for orbit determination.” Journal of Opti- mization Theory and Applications 191.2 (2021): 459-485
Servadio, Simone, and Renato Zanetti. ”Differential algebra-based mul- tiple gaussian particle filter for orbit determination.” Journal of Opti- mization Theory and Applications 191.2 (2021): 459-485
2021
-
[5]
Lunar Orbiter State Estimation Using Neural Network- Based Crater Detection,
L. M. Downes, “Lunar Orbiter State Estimation Using Neural Network- Based Crater Detection,” S.M. thesis, Dept. of Aeronautics and Astro- nautics, Massachusetts Institute of Technology, Cambridge, MA, USA, May 2020
2020
-
[6]
Deep Learning Crater Detection for Lunar Terrain Relative Navigation,
L. M. Downes, T. J. Steiner, and J. P. How, “Deep Learning Crater Detection for Lunar Terrain Relative Navigation,”AIAA SciTech 2020 F orum, 2020
2020
-
[7]
Stefano Silvestrini, Margherita Piccinin, Giovanni Zanotti, Andrea Brandonisio, Ilaria Bloise, Lorenzo Feruglio, Paolo Lunghi, Mich `ele Lavagna, Mattia Varile, Optical navigation for Lunar landing based on Convolutional Neural Network crater detector, Aerospace Sci- ence and Technology, V olume 123, 2022, 107503, ISSN 1270-9638, https://doi.org/10.1016/j...
-
[8]
Robust automatic crater detection at all latitudes on Mars with Deep-learning
Martinez Leonard, Franc ¸ois Andrieu, Fr ´ed´eric Schmidt, Hugues Talbot, Bentley Mark. Robust automatic crater detection at all latitudes on Mars with Deep-learning. Planetary and Space Science, 2025, 260, 10.1016/j.pss.2025.106053
-
[9]
X. Lin, T. Li, B. Hua, L. Li and C. Zhao, ”CraterSense: Efficient and Robust Crater-Based Lunar Localization System With Structure-Aware Sparse Transformer,” in IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, vol. 19, pp. 49-69, 2026, doi: 10.1109/JSTARS.2025.3633611
-
[10]
Yu, R., & Xu, Z. (2025). Crater-MASN: A Multi-Scale Adaptive Se- mantic Network for Efficient Crater Detection. Remote Sensing, 17(18),
2025
-
[11]
https://doi.org/10.3390/rs17183139
-
[12]
Sinha, M., Paul, S., Ghosh, M., Mohanty, S. N., & Pattanayak, R. M. (2024). Automated Lunar Crater Identification with Chandrayaan-2 TMC-2 Images using Deep Convolutional Neural Networks. Scientific reports, 14(1), 8231. https://doi.org/10.1038/s41598-024-58438-4
-
[13]
E. Emami, T. Ahmad, G. Bebis, A. Nefian and T. Fong, ”Crater De- tection Using Unsupervised Algorithms and Convolutional Neural Net- works,” in IEEE Transactions on Geoscience and Remote Sensing, vol. 57, no. 8, pp. 5373-5383, Aug. 2019, doi: 10.1109/TGRS.2019.2899122
-
[14]
Mimansa Sinha, Sanchita Paul, Automated detection of craters on the lunar surface using deep learning: A review with insights from Chandrayaan-2 TMC-2 data, Results in Earth Sciences, V olume 3, 2025, 100094, ISSN 2211-7148, https://doi.org/10.1016/j.rines.2025.100094
-
[15]
Silvestrini, S. Deep visual odometry and pose reconstruction through single image depth map and triangulation for terrain relative navigation. Astrodyn (2026). https://doi.org/10.1007/s42064-025-0282-4
-
[16]
S. Chatterjee, S. Chakraborty, P. Roy Chowdhury, B. Deshmukh and A. Nath, ”Toward Faster and Accurate Detection of Craters,” in IEEE Geoscience and Remote Sensing Letters, vol. 22, pp. 1-5, 2025, Art no. 8001605, doi: 10.1109/LGRS.2025.3557756
-
[17]
UNet++: A Nested U-Net Architecture for Medical Image Segmentation,
Z. Zhou, M. M. R. Siddiquee, N. Tajbakhsh, and J. Liang, “UNet++: A Nested U-Net Architecture for Medical Image Segmentation,”Deep Learning in Medical Image Analysis, 2018
2018
-
[18]
NASA Crater Detection Challenge,
NASA, “NASA Crater Detection Challenge,” National Aeronautics and Space Administration, Nov. 25, 2025. [Online]. Available: https://www. nasa.gov/directorates/stmd/prizes-challenges-crowdsourcing-program/ center-of-excellence-for-collaborative-innovation-coeci/ nasa-crater-detection-challenge/. [Accessed: Mar. 1, 2026]
2025
-
[19]
NASA Crater Detection,
Topcoder, “NASA Crater Detection,” Topcoder Challenge Page. [On- line]. Available: https://www.topcoder.com/nasa-crater-detection. [Ac- cessed: Mar. 1, 2026]
2026
-
[20]
Robinson, M.S., Brylow, S.M., Tschimmel, M. et al. Lunar Reconnais- sance Orbiter Camera (LROC) Instrument Overview. Space Sci Rev 150, 81–124 (2010). https://doi.org/10.1007/s11214-010-9634-2
-
[21]
Robbins, S. J. (2019). A new global database of lunar impact craters ¿1–2 km: 1. Crater locations and sizes, comparisons with published databases, and global analysis. Journal of Geophysical Research: Planets, 124, 871–892. https://doi.org/10.1029/2018JE005592
-
[22]
Global distribution of large lunar craters: implications for resurfacing and impactor populations,
J. W. Head, C. I. Fassett, S. J. Kadish, D. E. Smith, M. T. Zuber, G. A. Neumann, and E. Mazarico, “Global distribution of large lunar craters: implications for resurfacing and impactor populations,” Science, vol. 329, no. 5998, pp. 1504–1507, Sep 2010
2010
-
[23]
Compilation of a Global GIS Crater Database for the Moon,
N. G. Barlow et al., “Compilation of a Global GIS Crater Database for the Moon,”AAS/Division for Planetary Sciences Meeting Abstracts, 2012
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.