Learning Locomotion on Discrete Terrain via Minimal Proximity Sensing
Pith reviewed 2026-07-01 04:52 UTC · model grok-4.3
The pith
Foot-mounted infrared sensors supply pre-contact signals that let reinforcement learning policies traverse discrete terrain more robustly than vision or proprioception alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
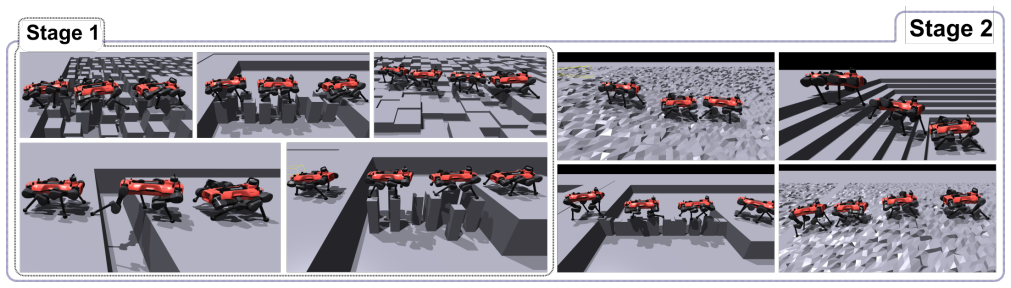
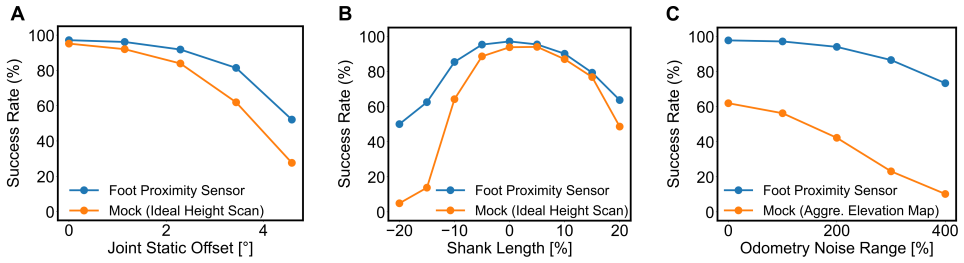
By mounting infrared proximity sensors directly on the feet and feeding their sparse near-field readings into a reinforcement learning policy, a quadrupedal robot gains the ability to anticipate terrain discontinuities such as gaps and stepping stones, yielding substantially higher traversal robustness on discrete terrain than policies relying solely on proprioception or global perception.
What carries the argument
Foot-embedded infrared proximity sensors that deliver high-frequency pre-contact distance signals for direct inclusion in the reinforcement learning observation space.
If this is right
- The robot can handle terrain layouts where occlusions or state-estimation drift defeat LiDAR and depth cameras.
- Policy corrections begin before foot impact rather than after.
- Sensor modeling in simulation supports direct deployment on hardware with minimal additional tuning.
- The approach consumes far less power and compute than dense geometric reconstruction pipelines.
Where Pith is reading between the lines
- The same foot-sensor approach could be tested on bipeds or hexapods facing comparable discrete obstacles.
- Combining the proximity readings with existing proprioceptive terms might produce even tighter step adjustments.
- Reducing the number of sensors per foot or altering their placement angles offers a direct way to measure the minimal viable configuration.
Load-bearing premise
The sparse signals from the foot-mounted infrared sensors can be modeled in simulation with enough accuracy to transfer to the real robot without large performance loss.
What would settle it
Identical discrete-terrain courses run without the proximity sensors showing equal or higher success rates than the sensor-equipped version.
Figures

read the original abstract
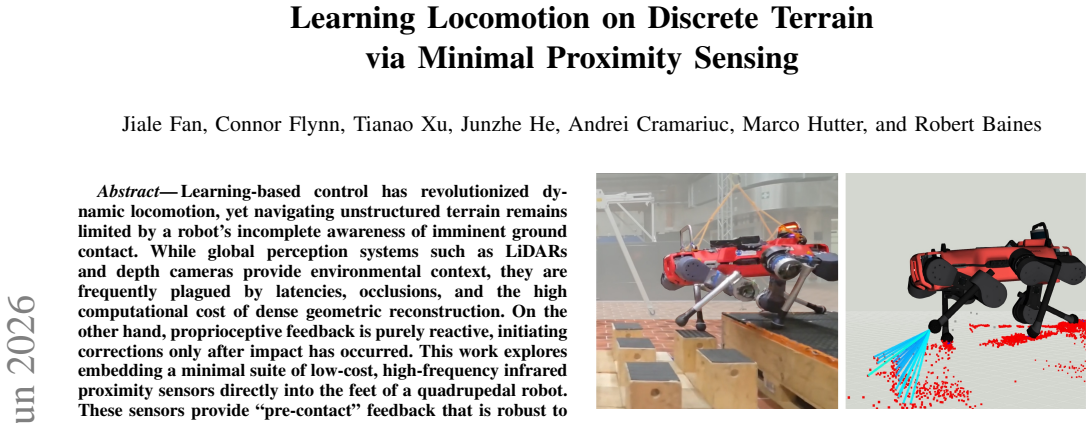
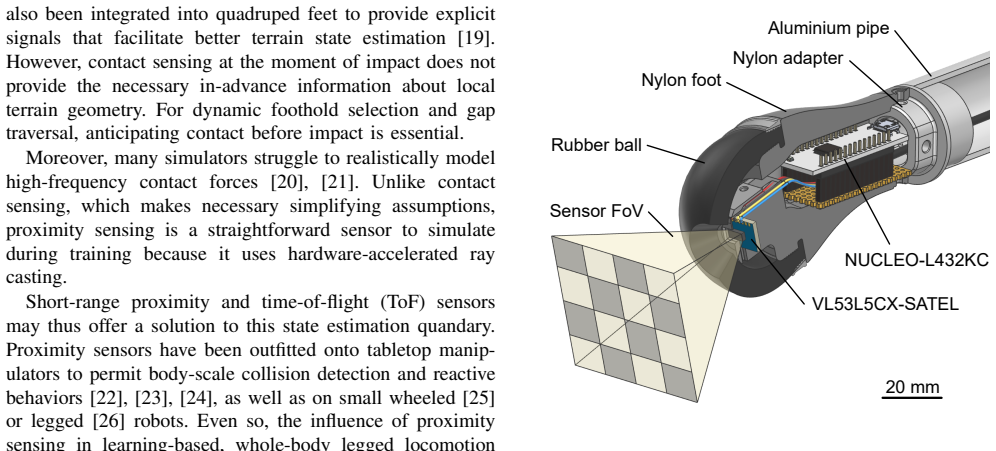
Learning-based control has revolutionized dynamic locomotion, yet navigating unstructured terrain remains limited by a robot's incomplete awareness of imminent ground contact. While global perception systems such as LiDARs and depth cameras provide environmental context, they are frequently plagued by latencies, occlusions, and the high computational cost of dense geometric reconstruction. On the other hand, proprioceptive feedback is purely reactive, initiating corrections only after impact has occurred. This work explores embedding a minimal suite of low-cost, high-frequency infrared proximity sensors directly into the feet of a quadrupedal robot. These sensors provide "pre-contact" feedback that is robust to self-occlusions and significantly less computationally demanding than conventional vision-based pipelines. By integrating these localized signals into a reinforcement learning framework, we enable the robot to anticipate terrain discontinuities such as gaps and stepping stones that are problematic for traditional perception stacks due to occlusions or state estimation drift. We demonstrate that such sparse, near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity. Experimental results show that local proximity sensing substantially improves traversal robustness over discrete terrain and offers a low-power, low-latency alternative or complement to complex global perception suites in unpredictable environments. For more information about results and methods, please see the project website: https://sites.google.com/view/foot-tof/home.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that embedding a minimal suite of foot-mounted infrared proximity sensors on a quadrupedal robot provides pre-contact feedback that, when integrated into an RL locomotion policy, enables anticipation of terrain discontinuities such as gaps and stepping stones. It further asserts that these sparse near-field signals can be modeled with high fidelity in simulation, transferred to hardware, and yield substantially improved traversal robustness relative to purely proprioceptive or global-perception baselines, while offering lower power and latency.
Significance. If the sim-to-real transfer and robustness gains hold under quantitative scrutiny, the approach would constitute a practical, low-cost complement or alternative to dense vision pipelines for legged robots operating in unstructured environments. The emphasis on minimal, local sensing directly addresses latency, occlusion, and compute bottlenecks that currently limit deployment.
major comments (1)
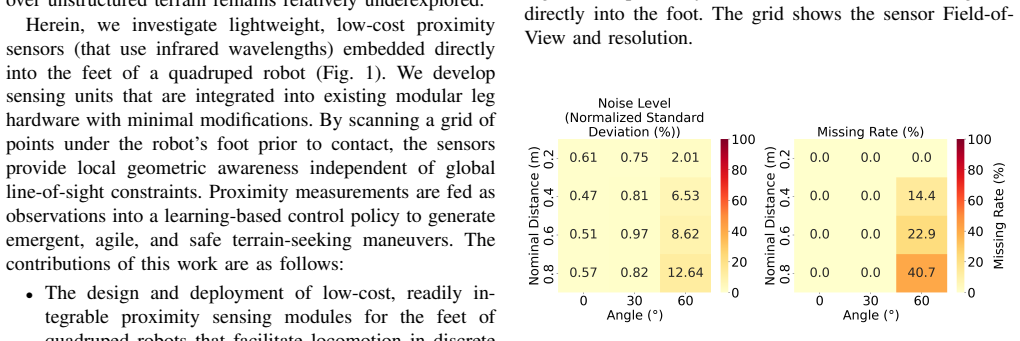
- [Abstract] Abstract: The load-bearing claim that 'sparse, near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity' is stated without any sensor-model specification (ray geometry, incidence-angle effects, noise model, reflectance assumptions) or quantitative sim-to-real metrics (signal correlation, policy gap, ablation on modeling choices). This absence prevents verification of the reported robustness improvements.
minor comments (1)
- [Abstract] Abstract: Reliance on an external project website for 'results and methods' violates the expectation that a manuscript be self-contained; key quantitative results, baselines, and sensor-model parameters should appear in the main text or supplementary material.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the single major comment below and will incorporate clarifications to strengthen the presentation of our sensor modeling and validation approach.
read point-by-point responses
-
Referee: [Abstract] Abstract: The load-bearing claim that 'sparse, near-field sensing can be reliably modeled in simulation and transferred to the real world with high fidelity' is stated without any sensor-model specification (ray geometry, incidence-angle effects, noise model, reflectance assumptions) or quantitative sim-to-real metrics (signal correlation, policy gap, ablation on modeling choices). This absence prevents verification of the reported robustness improvements.
Authors: We agree that the abstract, owing to length constraints, does not enumerate the sensor-model parameters or quantitative transfer metrics. The body of the manuscript (Section III-B) specifies the infrared proximity model as a ray-casting approximation with fixed incidence-angle falloff, additive Gaussian noise calibrated to hardware datasheets, and a constant reflectance assumption for typical terrain surfaces. To directly address the concern, the revised manuscript will (i) expand the abstract with a one-sentence reference to the modeling choices, (ii) insert a dedicated paragraph in Section III-B that tabulates ray geometry, noise parameters, and incidence effects, and (iii) add a new results subsection with quantitative sim-to-real metrics (Pearson correlation of raw signals, policy success-rate gap, and an ablation on reflectance/noise modeling). These additions will enable independent verification of the reported robustness gains without altering the core claims. revision: yes
Circularity Check
No circularity: experimental RL demonstration with external benchmarks
full rationale
The paper is an experimental demonstration of RL-based locomotion control using foot-mounted IR proximity sensors. No mathematical derivation chain, equations, fitted parameters, or predictions are presented that reduce to inputs by construction. Claims rest on empirical sim-to-real transfer results and real-robot traversal tests, which are externally falsifiable. No self-citation load-bearing steps or ansatz smuggling appear in the provided text. This matches the default expectation of no significant circularity for non-derivational work.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Extreme parkour with legged robots,
X. Cheng, K. Shi, A. Agarwal, and D. Pathak, “Extreme parkour with legged robots,” in2024 IEEE International Conference on Robotics and Automation (ICRA), 2024, pp. 11 443–11 450
2024
-
[2]
ANYmal parkour: Learning agile navigation for quadrupedal robots,
D. Hoeller, N. Rudin, D. Sako, and M. Hutter, “ANYmal parkour: Learning agile navigation for quadrupedal robots,”Science Robotics, vol. 9, no. 88, p. eadi7566, Mar. 2024
2024
-
[3]
Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,
C. Lin, X. Liu, Y . Yang, Y . Niu, W. Yu, T. Zhang, J. Tan, B. Boots, and D. Zhao, “Locoman: Advancing versatile quadrupedal dexterity with lightweight loco-manipulators,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024, pp. 6877– 6884
2024
-
[4]
Learning coor- dinated badminton skills for legged manipulators,
Y . Ma, A. Cramariuc, F. Farshidian, and M. Hutter, “Learning coor- dinated badminton skills for legged manipulators,”Science robotics, vol. 10, no. 102, p. eadu3922, 2025
2025
-
[5]
Continuous jumping for legged robots on stepping stones via trajectory optimization and model predictive control,
C. Nguyen, L. Bao, and Q. Nguyen, “Continuous jumping for legged robots on stepping stones via trajectory optimization and model predictive control,” in2022 IEEE 61st Conference on Decision and Control (CDC), 2022, pp. 93–99
2022
-
[6]
Robust ladder climbing with a quadrupedal robot,
D. V ogel, R. Baines, J. Church, J. Lotzer, K. Werner, and M. Hutter, “Robust ladder climbing with a quadrupedal robot,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, pp. 7239–7244
2025
-
[7]
High-speed control and navigation for quadrupedal robots on complex and discrete terrain,
H. Kim, H. Oh, J. Park, Y . Kim, D. Youm, M. Jung, M. Lee, and J. Hwangbo, “High-speed control and navigation for quadrupedal robots on complex and discrete terrain,”Science Robotics, vol. 10, no. 102, p. eads6192, 2025
2025
-
[8]
Neural scene representation for locomotion on structured terrain,
D. Hoeller, N. Rudin, C. Choy, A. Anandkumar, and M. Hutter, “Neural scene representation for locomotion on structured terrain,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 8667–8674, 2022
2022
-
[9]
Learning to walk in confined spaces using 3d representation,
T. Miki, J. Lee, L. Wellhausen, and M. Hutter, “Learning to walk in confined spaces using 3d representation,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 8649–8656
2024
-
[10]
N. Rudin, J. He, J. Aurand, and M. Hutter, “Parkour in the wild: Learn- ing a general and extensible agile locomotion policy using multi-expert distillation and rl fine-tuning,”arXiv preprint arXiv:2505.11164, 2025
-
[11]
Iterated extended kalman filter based visual-inertial odometry using direct pho- tometric feedback,
M. Bloesch, M. Burri, S. Omari, M. Hutter, and R. Siegwart, “Iterated extended kalman filter based visual-inertial odometry using direct pho- tometric feedback,”The International Journal of Robotics Research, vol. 36, no. 10, pp. 1053–1072, 2017
2017
-
[12]
Touching a nerf: Leveraging neural radiance fields for tactile sensory data generation,
S. Zhong, A. Albini, O. P. Jones, P. Maiolino, and I. Posner, “Touching a nerf: Leveraging neural radiance fields for tactile sensory data generation,” inConference on Robot Learning. PMLR, 2023, pp. 1618–1628
2023
-
[13]
Deep tactile experience: Estimating tactile sensor output from depth sensor data,
K. Patel, S. Iba, and N. Jamali, “Deep tactile experience: Estimating tactile sensor output from depth sensor data,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2020, pp. 9846–9853
2020
-
[14]
Collision detection and reaction: A contribution to safe physical human-robot interaction,
S. Haddadin, A. Albu-Schaffer, A. De Luca, and G. Hirzinger, “Collision detection and reaction: A contribution to safe physical human-robot interaction,” in2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2008, pp. 3356–3363
2008
-
[15]
State estimation for legged robots- consistent fusion of leg kinematics and imu,
M. Bloesch, M. Hutter, M. A. Hoepflinger, S. Leutenegger, C. Gehring, C. D. Remy, and R. Siegwart, “State estimation for legged robots- consistent fusion of leg kinematics and imu,”Robotics, vol. 17, pp. 17–24, 2013
2013
-
[16]
Probabilistic contact estimation and impact detection for state estimation of quadruped robots,
M. Camurri, M. Fallon, S. Bazeille, A. Radulescu, V . Barasuol, D. G. Caldwell, and C. Semini, “Probabilistic contact estimation and impact detection for state estimation of quadruped robots,”IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1023–1030, 2017
2017
-
[17]
Perceptive locomotion through nonlinear model-predictive control,
R. Grandia, F. Jenelten, S. Yang, F. Farshidian, and M. Hutter, “Perceptive locomotion through nonlinear model-predictive control,” IEEE Transactions on Robotics, vol. 39, no. 5, pp. 3402–3421, 2023
2023
-
[18]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science Robotics, vol. 7, no. 62, p. eabk2822, Jan. 2022
2022
-
[19]
An adaptive sensor foot for a bipedal and quadrupedal robot,
K. Fondahl, D. Kuehn, F. Beinersdorf, F. Bernhard, F. Grimminger, M. Schilling, T. Stark, and F. Kirchner, “An adaptive sensor foot for a bipedal and quadrupedal robot,” in2012 4th IEEE RAS & EMBS In- ternational Conference on Biomedical Robotics and Biomechatronics (BioRob), 2012, pp. 270–275
2012
-
[20]
Isaac Gym: High Performance GPU-Based Physics Simulation For Robot Learning
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Mack- lin, D. Hoeller, N. Rudin, A. Allshire, A. Handa,et al., “Isaac gym: High performance gpu-based physics simulation for robot learning,” arXiv preprint arXiv:2108.10470, 2021
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[21]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
M. Mittal, P. Roth, J. Tigue, A. Richard, O. Zhang, P. Du, A. Serrano- Munoz, X. Yao, R. Zurbr ¨ugg, N. Rudin,et al., “Isaac lab: A gpu- accelerated simulation framework for multi-modal robot learning,” arXiv preprint arXiv:2511.04831, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[22]
Proximity skin sensor using time-of-flight sensor for human collaborative robot,
S. Tsuji and T. Kohama, “Proximity skin sensor using time-of-flight sensor for human collaborative robot,”IEEE Sensors Journal, vol. 19, no. 14, pp. 5859–5864, 2019
2019
-
[23]
Estimating scene flow in robot surroundings with distributed miniaturised time-of-flight sensors,
J. Sander, G. Caroleo, A. Albini, and P. Maiolino, “Estimating scene flow in robot surroundings with distributed miniaturised time-of-flight sensors,” in2025 34th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2025, pp. 493–499
2025
-
[24]
Real-time obstacle avoidance using dual-type proximity sensor for safe human- robot interaction,
S. J. Moon, J. Kim, H. Yim, Y . Kim, and H. R. Choi, “Real-time obstacle avoidance using dual-type proximity sensor for safe human- robot interaction,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8021–8028, 2021
2021
-
[25]
Miniature mobile robot detection using an ultralow-resolution time- of-flight sensor,
J. Pleterski, G. ˇSkulj, C. Esnault, J. Puc, R. Vrabi ˇc, and P. Podr ˇzaj, “Miniature mobile robot detection using an ultralow-resolution time- of-flight sensor,”IEEE Transactions on Instrumentation and Measure- ment, vol. 72, pp. 1–9, 2023
2023
-
[26]
Pre-landing control for a legged robot based on tiptoe proximity sensor feedback,
R. Sato, H. Arita, and A. Ming, “Pre-landing control for a legged robot based on tiptoe proximity sensor feedback,”IEEE Access, vol. 10, pp. 21 619–21 630, 2022
2022
-
[27]
Elevation mapping for locomotion and navigation using gpu,
T. Miki, L. Wellhausen, R. Grandia, F. Jenelten, T. Homberger, and M. Hutter, “Elevation mapping for locomotion and navigation using gpu,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 2273–2280
2022
-
[28]
Marg: Mastering risky gap terrains for legged robots with elevation mapping,
Y . Dong, J. Ma, L. Zhao, W. Li, and P. Lu, “Marg: Mastering risky gap terrains for legged robots with elevation mapping,”IEEE Transactions on Robotics, vol. 41, pp. 6123–6139, 2025
2025
-
[29]
Attention-based map encoding for learning generalized legged loco- motion,
J. He, C. Zhang, F. Jenelten, R. Grandia, M. B ¨acher, and M. Hutter, “Attention-based map encoding for learning generalized legged loco- motion,”Science Robotics, vol. 10, no. 105, p. eadv3604, 2025
2025
-
[30]
Start: Traversing sparse footholds with terrain reconstruction,
R. Yu, Q. Wang, H. Li, Z. Jun, Z. Wang, J. Wu, and Q. Zhu, “Start: Traversing sparse footholds with terrain reconstruction,”IEEE Robotics and Automation Letters, vol. 11, no. 2, pp. 2194–2201, 2026
2026
-
[31]
Learning agile loco- motion on risky terrains,
C. Zhang, N. Rudin, D. Hoeller, and M. Hutter, “Learning agile loco- motion on risky terrains,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 11 864– 11 871
2024
-
[32]
Long short-term memory,
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural computation, vol. 9, no. 8, pp. 1735–1780, 1997
1997
-
[33]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, “Proximal policy optimization algorithms,”arXiv preprint arXiv:1707.06347, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[34]
Rsl-rl: A learning library for robotics research.arXiv preprint arXiv:2509.10771,
C. Schwarke, M. Mittal, N. Rudin, D. Hoeller, and M. Hutter, “Rsl-rl: A learning library for robotics research,”arXiv preprint arXiv:2509.10771, 2025
-
[35]
Learning to walk in minutes using massively parallel deep reinforcement learning,
N. Rudin, D. Hoeller, P. Reist, and M. Hutter, “Learning to walk in minutes using massively parallel deep reinforcement learning,” in Conference on robot learning. PMLR, 2022, pp. 91–100
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.