Adversarial observations in probabilistic State-Space Models for robust Reinforcement Learning
Pith reviewed 2026-06-26 15:03 UTC · model grok-4.3
The pith
Adversarial observation shifts that remain model-consistent change latent states and policies in linear state-space RL models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Adversarial yet realistic observation shifts influence the latent state and influence policy decisions in linear probabilistic state-space models for reinforcement learning. This perspective provides a principled pathway toward building more robust reinforcement learning systems, with direct relevance to safety-critical domains such as robotics.
What carries the argument
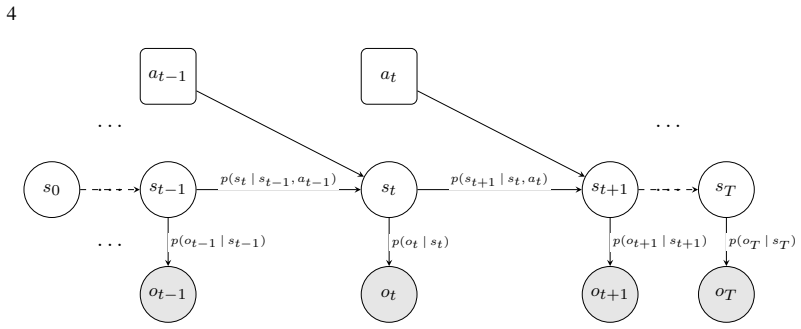
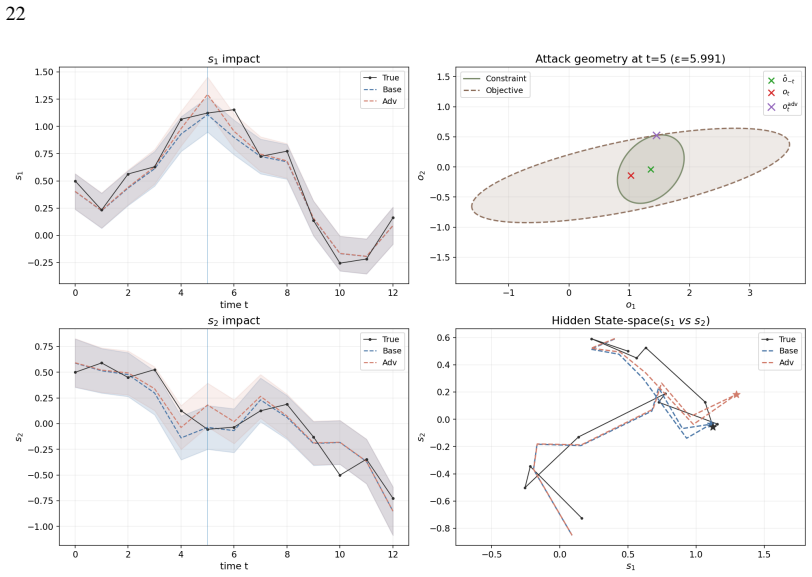
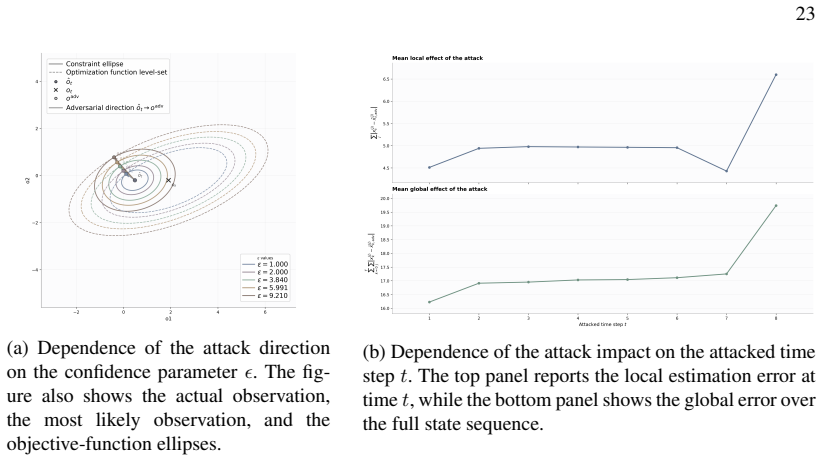
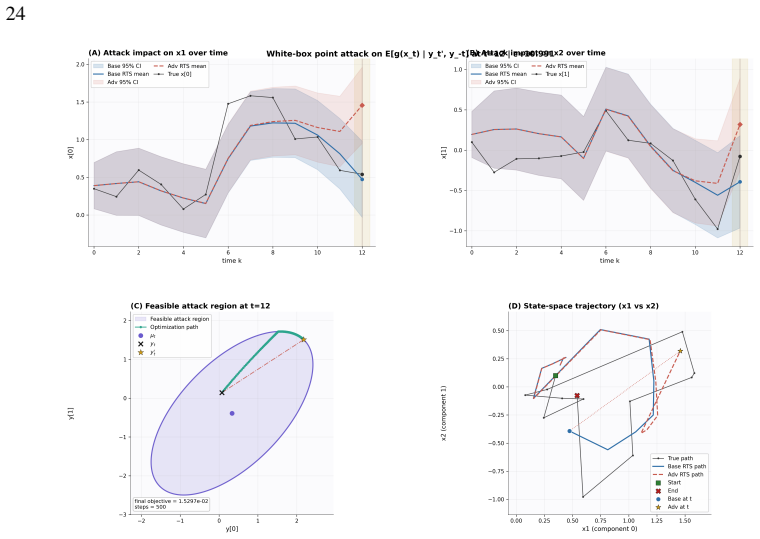
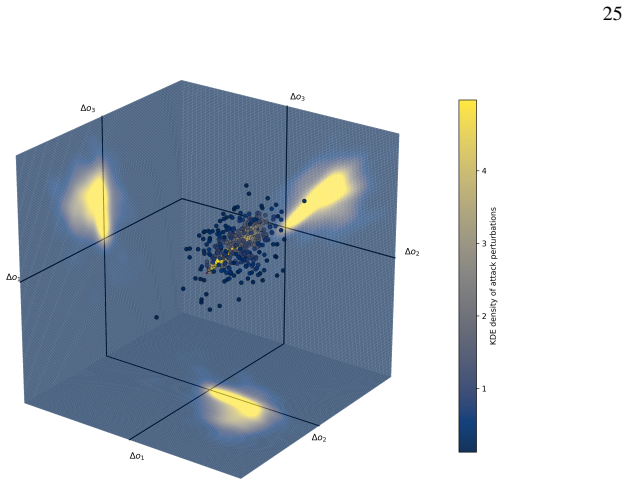
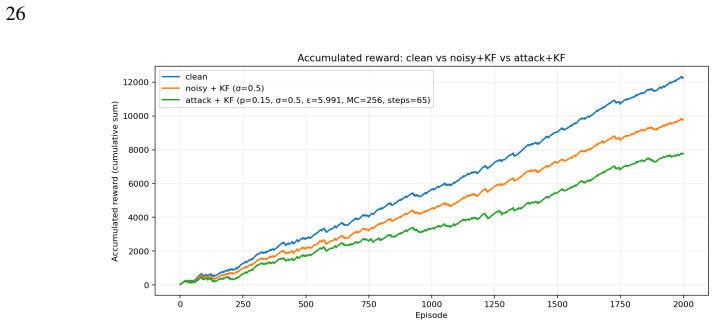
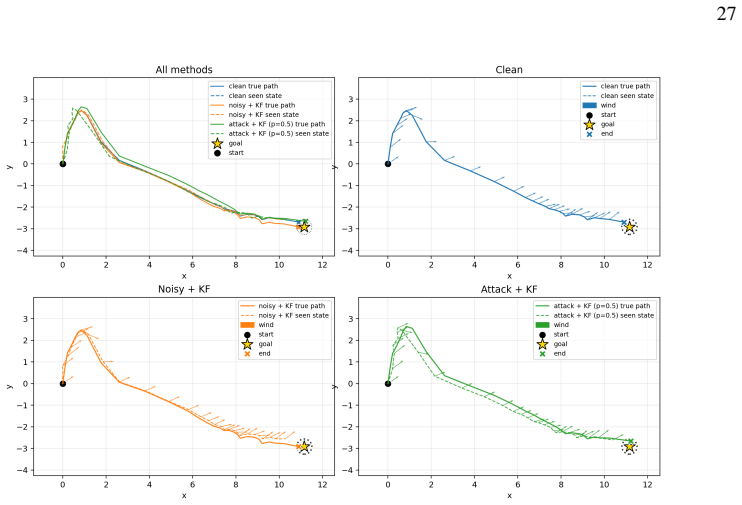
Likelihood-constrained adversarial perturbations on observations in linear probabilistic state-space models, which affect latent state inference and policy decisions.
If this is right
- Such attacks can mislead the inference of the environment's latent state.
- Policy decisions become vulnerable to these consistent observation changes.
- Robustness in RL can be improved by considering these adversarial effects.
- Applications in robotics require accounting for sensor noise and attacks.
Where Pith is reading between the lines
- Extending this analysis to nonlinear or deep state-space models could reveal broader vulnerabilities.
- Empirical tests on physical robotic platforms would validate the influence on real policies.
- Designing RL training procedures that simulate such attacks might yield inherently more robust policies.
Load-bearing premise
The attacker alters observations under likelihood constraints that ensure the perturbations remain consistent with the model.
What would settle it
Demonstrating that likelihood-constrained observation perturbations in a linear SSM for RL do not change the inferred latent state or the chosen policy would falsify the central claim.
Figures
read the original abstract
Decision-making under partial or adversarial observability requires accurate inference of the environment's latent state and its associated uncertainty. This work analyses adversarial attacks on linear probabilistic state-space models, commonly integrated within reinforcement learning architectures, where the attacker alters observations under likelihood constraints that ensure the perturbations remains consistent. We analyze how such adversarial yet realistic observation shifts influence the latent state and influence policy decisions. This perspective provides a principled pathway toward building more robust reinforcement learning systems, with direct relevance to safety-critical domains such as robotics, where reliable operation under sensor noise, partial failures, and adversarial conditions is essential.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims that in linear probabilistic state-space models integrated with reinforcement learning, an attacker can alter observations subject to likelihood constraints (ensuring perturbations remain consistent with the model) and that these realistic adversarial shifts still influence the inferred latent state and downstream policy decisions. The work positions this analysis as a pathway to more robust RL systems, particularly for safety-critical domains.
Significance. The topic addresses an important intersection of adversarial robustness, state estimation, and RL. If the central claim were supported by explicit derivations through the filtering recursions and by reproducible experiments showing policy degradation under likelihood-constrained attacks, it would be relevant to safety-critical applications. However, the manuscript supplies no such derivations, experiments, or quantitative results, so the significance cannot be evaluated.
major comments (2)
- [Abstract] Abstract and entire manuscript: the central claim—that likelihood-constrained observation perturbations shift the latent state and alter policy decisions—is stated but never demonstrated. No filtering equations, attack formulation, or propagation analysis is provided, rendering the claim unsupported.
- No section, table, or equation supplies the linear SSM dynamics, the observation likelihood used for the constraint, the filtering update, or the policy mapping. Without these, it is impossible to verify whether the perturbations remain inside the model or produce the claimed downstream effect.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The comments correctly note that the submitted manuscript lacks explicit equations, derivations, and experimental demonstrations of the central claims. We will revise the paper to address these gaps by adding the required mathematical details and supporting analyses.
read point-by-point responses
-
Referee: [Abstract] Abstract and entire manuscript: the central claim—that likelihood-constrained observation perturbations shift the latent state and alter policy decisions—is stated but never demonstrated. No filtering equations, attack formulation, or propagation analysis is provided, rendering the claim unsupported.
Authors: We agree that the current version does not demonstrate the claim through explicit derivations. In the revised manuscript we will add a dedicated technical section deriving the linear probabilistic SSM, formulating the likelihood-constrained adversarial observation shift, showing the filtering recursion updates, and tracing the propagation to the posterior latent state and the downstream policy. This will make the central claim explicit and verifiable. revision: yes
-
Referee: [—] No section, table, or equation supplies the linear SSM dynamics, the observation likelihood used for the constraint, the filtering update, or the policy mapping. Without these, it is impossible to verify whether the perturbations remain inside the model or produce the claimed downstream effect.
Authors: This observation is accurate for the submitted draft. The revision will include the precise linear SSM state and observation equations, the form of the observation likelihood used to enforce the constraint, the filtering update equations, and the mapping from filtered latent states to policy actions. These additions will allow direct verification that the perturbations stay model-consistent and affect the policy. revision: yes
Circularity Check
No significant circularity detected
full rationale
The abstract and provided context describe an analysis that defines 'realistic' adversarial perturbations via explicit likelihood constraints and then traces their effects on latent states through standard filtering equations in linear probabilistic SSMs. No equations, derivations, self-citations, or fitted parameters are shown that reduce the central claim to its own inputs by construction. The setup is self-contained against the model dynamics without renaming known results or smuggling ansatzes. This matches the default expectation of no circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
BARRENO, M., NELSON, B., JOSEPH, A. D. and TYGAR, J. D. (2006). Can Machine Learning Be Secure? In Proceedings of the ACM Symposium on Information, Computer and Communications Security (ASIACCS)
2006
-
[2]
and MUNIR, A
BEHZADAN, V. and MUNIR, A. (2017). Vulnerability of Deep Reinforcement Learning to Policy Induction At- tacks.arXiv preprint
2017
-
[3]
Learning long-term dependencies with gradient descent is difficult
BENGIO, Y., SIMARD, P. and FRASCONI, P. (1994). Learning Long-Term Dependencies with Gradient Descent Is Difficult.IEEE Transactions on Neural Networks5157–166. https://doi.org/10.1109/72.279181
-
[4]
BIGGIO, B. and ROLI, F. (2018). Wild Patterns: Ten Years After the Rise of Adversarial Machine Learning. Pattern Recognition84317–331. https://doi.org/10.1016/j.patcog.2018.07.023
-
[5]
and VANDENBERGHE, L
BOYD, S. and VANDENBERGHE, L. (2004).Convex Optimization. Cambridge University Press, Cambridge, UK
2004
-
[6]
CAMERON, F., BEQUETTE, B. W., WILSON, D. M., BUCKINGHAM, B. A., LEE, H. and NIEMEYER, G. (2011). A Closed-Loop Artificial Pancreas Based on Risk Management.Journal of Diabetes Science and Technology 5368–379. https://doi.org/10.1177/193229681100500226
-
[7]
R., GOULD, N
CONN, A. R., GOULD, N. I. M. and TOINT, P. L. (2000).Trust-Region Methods. Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA
2000
-
[8]
ABDOLMALEKI, A.,DELASCASAS, D. et al. (2022). Magnetic control of tokamak plasmas through deep reinforcement learning.Nature602414–419. 28
2022
-
[9]
DENG, J., SIERLA, S., SUN, J. and VYATKIN, V. (2023). Offline Reinforcement Learning for Industrial Process Control: A Case Study from Steel Industry.Information Sciences632221–231. https://doi.org/10.1016/j.ins. 2023.03.019
-
[10]
and MURPHY, K
KNOBLAUCH, J., JONES, M., BRIOL, F.-X. and MURPHY, K. P. (2024). Outlier-Robust Kalman Fil- tering through Generalised Bayes. InProceedings of the 41st International Conference on Machine Learning. Proceedings of Machine Learning Research23512138–12171
2024
-
[11]
DURAN-MARTIN, G., SÁNCHEZ-BETANCOURT, L., SHESTOPALOFF, A. Y. and MURPHY, K. P. (2025). A Uni- fying Framework for Generalised Bayesian Online Learning in Non-Stationary Environments.Transactions on Machine Learning Research
2025
-
[12]
FANG, C., QI, Y., CHEN, J., TAN, R. and ZHENG, W. X. (2020). Stealthy Actuator Signal Attacks in Stochas- tic Control Systems: Performance and Limitations.IEEE Transactions on Automatic Control653927–3934. https://doi.org/10.1109/TAC.2019.2950072
-
[13]
RIA, L., SWANSON, V., LUM, J. W., KOLLMAN, C., WOODALL, W. and BECK, R. W. (2018). Predictive Low-Glucose Suspend Reduces Hypoglycemia in Adults, Adolescents, and Children With Type 1 Diabetes in an At-Home Randomized Crossover Study: Results of the PROLOG Trial.Diabetes Care412155–2161. https://doi.org/10.2337/dc18-0771 GARCÍA, J. and FERNÁNDEZ, F. (2015...
-
[14]
GAUDET, B., LINARES, R. and FURFARO, R. (2020). Deep Reinforcement Learning for Six Degree-of-Freedom Planetary Landing.Advances in Space Research651723–1741. https://doi.org/10.1016/j.asr.2019.12.030
-
[15]
and RUSSELL, S
GLEAVE, A., DENNIS, M., WILD, C., KANT, N., LEVINE, S. and RUSSELL, S. (2020). Adversarial Policies: Attacking Deep Reinforcement Learning. InInternational Conference on Learning Representations (ICLR)
2020
-
[16]
J., SHLENS, J
GOODFELLOW, I. J., SHLENS, J. and SZEGEDY, C. (2015). Explaining and Harnessing Adversarial Examples. InInternational Conference on Learning Representations (ICLR)
2015
-
[17]
and DAO, T
GU, A. and DAO, T. (2023). Mamba: Linear-Time Sequence Modeling with Selective State Spaces.arXiv preprint
2023
-
[18]
and RÉ, C
GU, A., GOEL, K. and RÉ, C. (2022). Efficiently Modeling Long Sequences with Structured State Spaces. In International Conference on Learning Representations (ICLR)
2022
-
[19]
and NOROUZI, M
HAFNER, D., LILLICRAP, T., BA, J. and NOROUZI, M. (2020). Dream to Control: Learning Behaviors by Latent Imagination. InInternational Conference on Learning Representations (ICLR)
2020
-
[20]
HARRISON, J. and WEST, M. (1991). Dynamic Linear Model Diagnostics.Biometrika78797–808. https://doi. org/10.1093/biomet/78.4.797
-
[21]
HINTON, G. E. (2002). Training Products of Experts by Minimizing Contrastive Divergence.Neural Computation 141771–1800
2002
-
[22]
and ABBEEL, P
HUANG, S., PAPERNOT, N., GOODFELLOW, I., DUAN, Y. and ABBEEL, P. (2017). Adversarial Attacks on Neural Network Policies.arXiv preprint
2017
-
[23]
P., LITTMAN, M
KAELBLING, L. P., LITTMAN, M. L. and CASSANDRA, A. R. (1998). Planning and Acting in Partially Observ- able Stochastic Domains.Artificial Intelligence10199–134
1998
-
[24]
and HASSIBI, B
KARGIN, T., HAJAR, J., MALIK, V. and HASSIBI, B. (2024). Distributionally Robust Kalman Filtering over Finite and Infinite Horizon
2024
-
[25]
and SCARAMUZZA, D
KAUFMANN, E., BAUERSFELD, L., LOQUERCIO, A., MÜLLER, M., KOLTUN, V. and SCARAMUZZA, D. (2023). Champion-level drone racing using deep reinforcement learning.Nature620982–987
2023
-
[26]
and LI, W
KIOURTI, P., WARDEGA, K., JHA, S. and LI, W. (2020). TrojDRL: Evaluation of Backdoor Attacks on Deep Reinforcement Learning. InProceedings of the 57th ACM/IEEE Design Automation Conference1–6. IEEE
2020
-
[27]
LI, H., MEDINA, D., VILÀ-VALLS, J. and CLOSAS, P. (2021). Robust Variational-Based Kalman Filter for Outlier Rejection With Correlated Measurements.IEEE Transactions on Signal Processing69357–369. https: //doi.org/10.1109/TSP.2020.3042944
-
[28]
and BEHBAHANI, F
LU, C., SCHROECKER, Y., GU, A., PARISOTTO, E., FOERSTER, J., SINGH, S. and BEHBAHANI, F. (2023). Structured State Space Models for In-Context Reinforcement Learning. InAdvances in Neural Information Processing Systems3647016–47031
2023
-
[29]
E., BOTTERO, A
LUIS, C. E., BOTTERO, A. G., VINOGRADSKA, J., BERKENKAMP, F. and PETERS, J. (2024). Uncertainty Representations in State-Space Layers for Deep Reinforcement Learning under Partial Observability.arXiv preprint
2024
-
[30]
and VLADU, A
MADRY, A., MAKELOV, A., SCHMIDT, L., TSIPRAS, D. and VLADU, A. (2018). Towards Deep Learning Mod- els Resistant to Adversarial Attacks. InInternational Conference on Learning Representations (ICLR)
2018
-
[31]
MURPHY, K. P. (2023).Probabilistic Machine Learning: Advanced Topics. MIT Press. 29
2023
-
[32]
and WRIGHT, S
NOCEDAL, J. and WRIGHT, S. J. (2006).Numerical Optimization, 2 ed. Springer, New York, NY
2006
-
[33]
and CAMPAGNOLI, P
PETRIS, G., PETRONE, S. and CAMPAGNOLI, P. (2009).Dynamic Linear Models with R. Springer Science & Business Media
2009
-
[34]
and SUKTHANKAR, R
PINTO, L., DAVIDSON, J. and SUKTHANKAR, R. (2017). Robust Adversarial Reinforcement Learning. InInter- national Conference on Machine Learning (ICML). QUIÑONERO-CANDELA, J., SUGIYAMA, M., SCHWAIGHOFER, A. and LAWRENCE, N. D., eds. (2009).Dataset Shift in Machine Learning. MIT Press
2017
-
[35]
and AMATO, C
RATHBUN, E., OPREA, A. and AMATO, C. (2025). Adversarial Inception Backdoor Attacks against Reinforce- ment Learning. InProceedings of the 42nd International Conference on Machine Learning.Proceedings of Machine Learning Research26751273–51296. PMLR
2025
-
[36]
RAUCH, H. E., TUNG, F. and STRIEBEL, C. T. (1965). Maximum likelihood estimates of linear dynamic sys- tems.AIAA Journal31445–1450. https://doi.org/10.2514/3.3166
-
[37]
Robust Bayesian Filtering and Smoothing Using Student's t Distribution
ROTH, M., ARDESHIRI, T., ÖZKAN, E. and GUSTAFSSON, F. (2017). Robust Bayesian Filtering and Smoothing Using Student’s t Distribution. https://doi.org/10.48550/arXiv.1703.02428 SÄRKKÄ, S. and HARTIKAINEN, J. (2013). Variational Bayesian Adaptation of Noise Covariances in Non-Linear Kalman Filtering. https://doi.org/10.48550/arXiv.1302.0681 SÄRKKÄ, S. and N...
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.1703.02428 2017
-
[38]
A., KUHN, D
SHAFIEEZADEH-ABADEH, S., NGUYEN, V. A., KUHN, D. and MOHAJERINESFAHANI, P. (2018). Wasserstein Distributionally Robust Kalman Filtering. InAdvances in Neural Information Processing Systems31
2018
-
[39]
(2005).Stochastic Volatility: Selected Readings
SHEPHARD, N., ed. (2005).Stochastic Volatility: Selected Readings. Oxford University Press
2005
-
[40]
TABUADA, P. (2017). Secure State Estimation for Cyber-Physical Systems under Sensor Attacks: A Satis- fiability Modulo Theory Approach.IEEE Transactions on Automatic Control624917–4932. https://doi.org/ 10.1109/TAC.2017.2650223
-
[41]
and LINDERMAN, S
SMITH, J., WARRINGTON, A. and LINDERMAN, S. W. (2023). Simplified State Space Layers for Sequence Modeling. InInternational Conference on Learning Representations (ICLR)
2023
-
[42]
SOMVANSHI, S., ISLAM, M. M., MIMI, M. S., POLOCK, S. B. B., CHHETRI, G., DUTTA, A., RAFE, A. and DAS, S. (2025). Advancing Intelligent Sequence Modeling: Evolution, Trade-offs, and Applications of State-Space Architectures from S4 to Mamba.arXiv preprint arXiv:2503.18970
Pith/arXiv arXiv 2025
-
[43]
VASSILEV, A., OPREA, A. et al. (2024). Adversarial Machine Learning: A Taxonomy and Terminology of At- tacks and Mitigations NIST AI Report No. NIST.AI.100-2e2023, National Institute of Standards and Technol- ogy (NIST). https://doi.org/10.6028/NIST.AI.100-2e2023
-
[44]
POLOSUKHIN, I. (2017). Attention Is All You Need. InAdvances in Neural Information Processing Systems (NeurIPS)
2017
-
[45]
WANG, H., LI, H., FANG, J. and WANG, H. (2018). Robust Gaussian Kalman Filter With Outlier Detection. IEEE Signal Processing Letters251236–1240. https://doi.org/10.1109/LSP.2018.2851156
-
[46]
and HARRISON, J
WEST, M. and HARRISON, J. (1997).Bayesian Forecasting and Dynamic Models. Springer Science & Business Media
1997
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.