Digital Multiplier-less Event-Driven Spiking Neural Network Architecture for Learning a Context-Dependent Task
Pith reviewed 2026-05-25 17:06 UTC · model grok-4.3
The pith
Multiplier-less digital hardware allows spiking neural networks to learn context-dependent tasks with reinforcement learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We propose a new digital multiplier-less hardware implementation of an SNN that learns stimulus-response associations in a context-dependent task through a reinforcement learning mechanism, with the architecture described using standard digital design flow and validated by implementing the behavioral experiments on a robot in a closed sensorimotor loop.
What carries the argument
The multiplier-less event-driven digital cores that implement both the spiking dynamics and the reinforcement learning updates for context discrimination.
If this is right
- The SNN can learn the required associations using only the RL mechanism in hardware.
- Learning functions correctly when embedded in a robotic closed sensorimotor loop.
- The design relies on power- and space-efficient digital cores.
- The approach supports event-based processing without porting conventional supervised learning methods.
Where Pith is reading between the lines
- Scaling this architecture might allow complex autonomous behaviors in low-power devices without separate learning hardware.
- The method could be tested on other context-dependent tasks to see the limits of the multiplier-less constraint.
- It suggests that RL in SNNs can be made fully digital, potentially simplifying integration with other digital systems.
Load-bearing premise
A reinforcement learning rule sufficient for context-dependent learning can be implemented entirely with multiplier-free digital operations.
What would settle it
Implement the proposed architecture in hardware, run the robot through the context-dependent task, and verify whether it learns the correct associations using only the described multiplier-less circuits.
Figures
read the original abstract
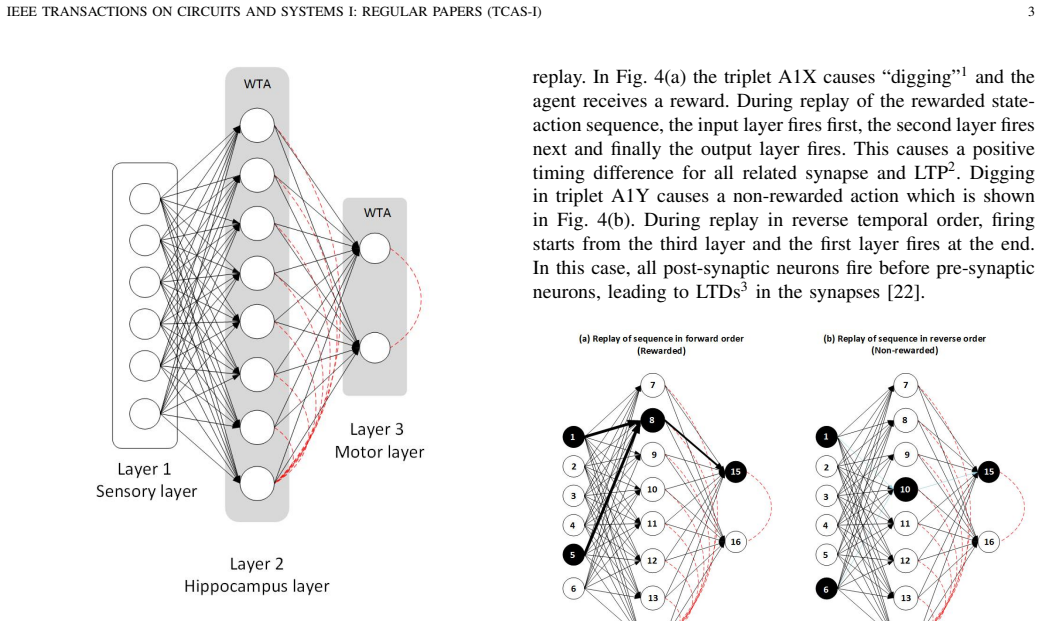
Neuromorphic engineers aim to develop event-based spiking neural networks (SNNs) in hardware. These SNNs closer resemble dynamics of biological neurons than todays' artificial neural networks and achieve higher efficiency thanks to the event-based, asynchronous nature of processing. Learning in SNNs is more challenging, however. Since conventional supervised learning methods cannot be ported on SNNs due to the non-differentiable event-based nature of their activation, learning in SNNs is currently an active research topic. Reinforcement learning (RL) is particularly promising method for neuromorphic implementation, especially in the field of autonomous agents' control, and is in focus of this work. In particular, in this paper we propose a new digital multiplier-less hardware implementation of an SNN. We show how this network can learn stimulus-response associations in a context-dependent task through a RL mechanism. The task is inspired by biological experiments used to study RL in animals. The architecture is described using the standard digital design flow and uses power- and space-efficient cores. We implement the behavioral experiments using a robot, to show that learning in hardware also works in a closed sensorimotor loop.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a new digital multiplier-less event-driven spiking neural network (SNN) architecture for neuromorphic hardware. It demonstrates that this SNN can learn stimulus-response associations in a context-dependent task via a reinforcement learning (RL) mechanism, with the architecture described using standard digital design flow and validated through robot experiments in a closed sensorimotor loop.
Significance. If the multiplier-less property is preserved through the RL weight updates and the hardware successfully forms the required context-dependent associations, the work would contribute an engineering demonstration of efficient neuromorphic RL suitable for autonomous agents, highlighting power and area savings from event-driven digital cores.
major comments (2)
- [Abstract] Abstract: the central claim that the RL mechanism is realized in a multiplier-less digital circuit is not supported by any equations, pseudocode, or circuit description of the weight-update rule, so it is impossible to verify that no hidden multiplies, shifts, or floating-point operations are present in the learning path.
- [Abstract] Abstract: no performance metrics, learning curves, success rates, or comparison to non-multiplier-less baselines are provided, leaving the claim that 'learning in hardware also works' without quantitative grounding.
minor comments (1)
- [Abstract] The abstract mentions 'power- and space-efficient cores' but provides no quantitative data on power consumption, area, or event rates.
Simulated Author's Rebuttal
We thank the referee for their comments on our manuscript. We address the two major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the RL mechanism is realized in a multiplier-less digital circuit is not supported by any equations, pseudocode, or circuit description of the weight-update rule, so it is impossible to verify that no hidden multiplies, shifts, or floating-point operations are present in the learning path.
Authors: The multiplier-less implementation of the RL weight updates is described in detail in Section 4 of the manuscript (Digital Architecture and Learning Rule), where the update is realized exclusively via additions and bit shifts with no multiplications or floating-point operations. We will add a short reference to this section in the abstract of the revised manuscript to make the support for the claim explicit. revision: partial
-
Referee: [Abstract] Abstract: no performance metrics, learning curves, success rates, or comparison to non-multiplier-less baselines are provided, leaving the claim that 'learning in hardware also works' without quantitative grounding.
Authors: We agree that the abstract would be strengthened by quantitative grounding. In the revised version we will include key metrics from the robot experiments (e.g., success rate after learning and number of trials to convergence) directly in the abstract. revision: yes
Circularity Check
No significant circularity; engineering demonstration with no load-bearing derivations or self-defined predictions
full rationale
The paper describes a hardware implementation of an event-driven SNN using RL for a context-dependent task, implemented on a robot. No equations, parameter-fitting procedures, or derivation chains are presented that reduce a claimed result to its own inputs by construction. The central claims concern circuit efficiency and behavioral functionality in closed-loop experiments; these are demonstrated rather than derived from self-referential definitions or self-citations that would force the outcome. The work is self-contained as an engineering artifact against external benchmarks (robot experiments) and does not invoke uniqueness theorems or ansatzes that collapse to prior author work.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/DimensionForcing.lean, Cost/FunctionalEquation.leanreality_from_one_distinction, washburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
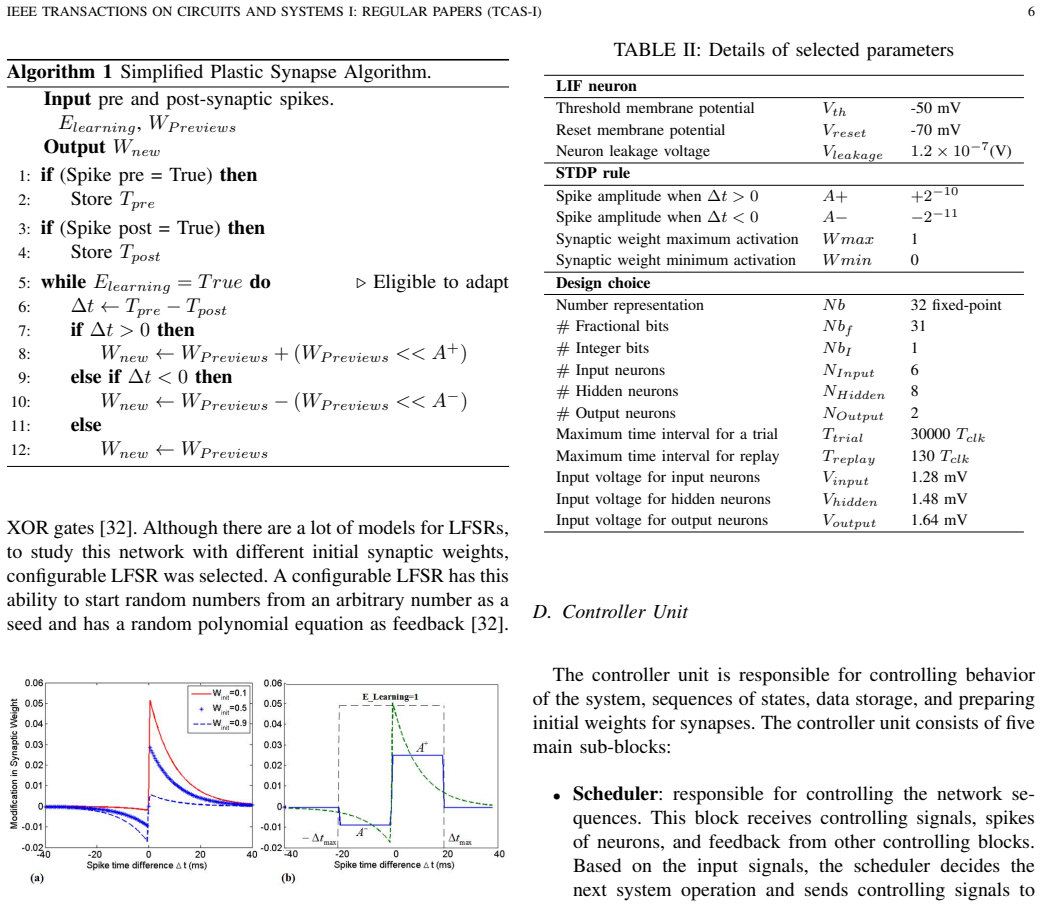
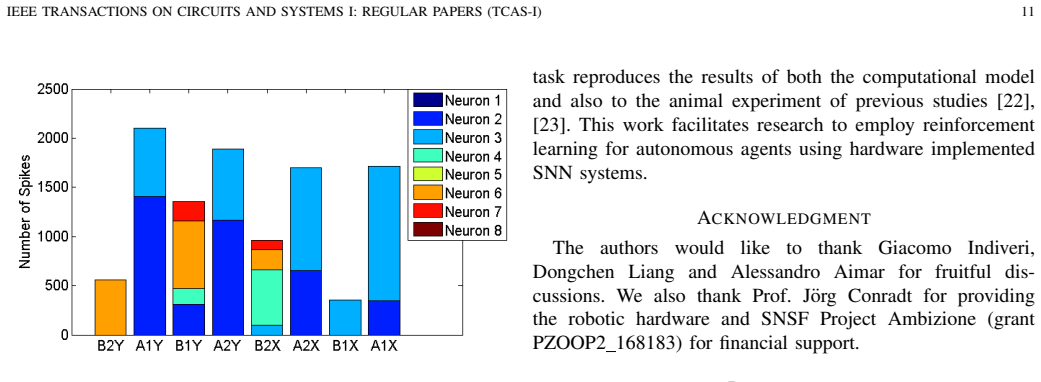
eight hippocampal neurons in the hidden layer have inhibitory connections among themselves... multiplier-less... ΔW = A+(WMax−W) if Δt>0... using shifts (WP reviews << A+)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
SpiNNaker - Programming Modele,
A. D. Brown et al., “SpiNNaker - Programming Modele,” IEEE Trans. Computers, vol. 64, no. 6, pp. 1769–1782, 2015
work page 2015
-
[2]
A million spiking-neuron integrated circuit with a scalable communication network and interface,
P. A. Merolla, J. V . Arthur, R. Alvarez-Icaza, A. S. Cassidy, J. Sawada, F. Akopyan, B. L. Jackson, N. Imam, C. Guo, Y . Nakamura, B. Brezzo, I. V o, S. K. Esser, R. Appuswamy, B. Taba, A. Amir, M. D. Flickner, W. P. Risk, R. Manohar, and D. S. Modha, “A million spiking-neuron integrated circuit with a scalable communication network and interface,” Scien...
work page 2014
-
[3]
C. Frenkel et al. , “A 0.086-mm212.7-pJ/SOP 64k-Synapse256-Neuron Online-Learning Digital Spiking Neuromorphic Processor in 28nm CMOS System,” IEEE Trans. Biomedical Syst , 2019
work page 2019
-
[4]
Simple Model of Spiking Neurons,
E. Izhikevich, “Simple Model of Spiking Neurons,” IEEE Trans. Neural Netw, vol. 14, no. 6, pp. 1569–1572, 2003
work page 2003
-
[5]
Which Model to Use for Cortical Spiking Neurons,
E. M. Izhikevich, “Which Model to Use for Cortical Spiking Neurons,” IEEE Trans. Neural Netw. , vol. 15, no. 5, pp. 1063–1070, 2004
work page 2004
-
[6]
S. Moradi, N. Qiao, F. Stefanini, and G. Indiveri, “A Scalable Multicore Architecture With Heterogeneous Memory Structures for Dynamic Neu- romorphic Asynchronous Processors (DYNAPs),” IEEE Trans. Biomed- ical Syst, vol. 12, no. 1, pp. 106 –122, 2018
work page 2018
-
[7]
G. Sch ¨oner, J. Spencer, and the DFT Research Group, Dynamic Think- ing: A Premier on Dynamic Field Theory . Oxford University Press, 2016
work page 2016
-
[8]
Neurogrid: A Mixed-Analog-Digital Multichip System for Large-Scale Neural Simulations,
B. V . Benjamin et al. , “Neurogrid: A Mixed-Analog-Digital Multichip System for Large-Scale Neural Simulations,” Proceedings of the IEEE , vol. 102, no. 5, pp. 699–716, 2014
work page 2014
-
[9]
N. Qiao et al., “A Reconfigurable On-Line Learning Spiking Neuromor- phic Processor Comprising 256 Neurons and 128K Synapses,” frontiers in Neuroscience, vol. 9, no. 141, pp. 1–17, 2015
work page 2015
-
[10]
Spike-Based Learning in VLSI Networks of Integrate-and-Fire Neurons,
G. Indiveri and S. Fusi, “Spike-Based Learning in VLSI Networks of Integrate-and-Fire Neurons,” in IEEE International Symposium on Circuits and Systems , New Orleans, LA, USA, 2007
work page 2007
-
[11]
Loihi: A neuromorphic manycore processor with on-chip learning,
M. Davies, N. Srinivasa, T. Lin, G. Chinya, Y . Cao, S. H. Choday, G. Dimou, P. Joshi, N. Imam, S. Jain, Y . Liao, C. Lin, A. Lines, R. Liu, D. Mathaikutty, S. McCoy, A. Paul, J. Tse, G. Venkataramanan, Y . Weng, A. Wild, Y . Yang, and H. Wang, “Loihi: A neuromorphic manycore processor with on-chip learning,” IEEE Micro, vol. 38, no. 1, pp. 82– 99, January 2018
work page 2018
-
[12]
Digital Multiplierless Realisation of a CalciumBased Plasticity Model,
E. Jokar and H. Soleimani, “Digital Multiplierless Realisation of a CalciumBased Plasticity Model,” IEEE Trans. Circuits Syst. II , vol. 64, no. 7, pp. 832–836, 2017
work page 2017
-
[13]
Digital Multiplier-less Realization of Two Coupled Biological Morris-Lecar Neuron Model,
M. Hayati et al. , “Digital Multiplier-less Realization of Two Coupled Biological Morris-Lecar Neuron Model,” IEEE Trans. Circuits Syst. II , vol. 62, no. 7, pp. 1805–1814, 2015
work page 2015
-
[14]
Biologically inspired spiking neurons: Piecewise linear models and digital implementation,
H. Soleimani, A. Ahmadi, and M. Bavandpour, “Biologically inspired spiking neurons: Piecewise linear models and digital implementation,” IEEE Transactions on Circuits and Systems I: Regular Papers , vol. 59, no. 12, pp. 2991–3004, Dec 2012
work page 2012
-
[15]
M. Nouri et al. , “A Digital Neuromorphic Realization of Pair-Based and Triplet-Based Spike-Timing-Dependent Synaptic Plasticity,” IEEE Trans. Circuits Syst. II , vol. 65, no. 6, pp. 804–808, 2018
work page 2018
-
[16]
Truenorth: Design and tool flow of a 65 mw 1 million neuron programmable neurosynaptic chip,
F. Akopyan, J. Sawada, A. Cassidy, R. Alvarez-Icaza, J. Arthur, P. Merolla, N. Imam, Y . Nakamura, P. Datta, G. Nam, B. Taba, M. Beakes, B. Brezzo, J. B. Kuang, R. Manohar, W. P. Risk, B. Jackson, and D. S. Modha, “Truenorth: Design and tool flow of a 65 mw 1 million neuron programmable neurosynaptic chip,” IEEE Transactions on Computer-Aided Design of Int...
work page 2015
-
[17]
Darwin: A Neuromorphic Hardware Co-processor Based on Spiking Neural Networks,
D. Ma et al., “Darwin: A Neuromorphic Hardware Co-processor Based on Spiking Neural Networks,” Journal of Computational Electronics , vol. 77, pp. 43–51, 2017
work page 2017
-
[18]
Unsupervised Character Recognition with a Simplified FPGA Neuromorphic System,
C. Lammie, T. Hamilton, and M. R. Azghadi, “Unsupervised Character Recognition with a Simplified FPGA Neuromorphic System,” in 2018 IEEE International Symposium on Circuits and Systems (ISCAS) , May 2018, pp. 1–5
work page 2018
-
[19]
A Low-Cost High-Speed Neuromorphic Hardware Based on Spiking Neural Network,
E. Z. Farsa et al. , “A Low-Cost High-Speed Neuromorphic Hardware Based on Spiking Neural Network,” IEEE Trans. Circuits Syst. II, 2019, doi: 10.1109/TCSII.2019.2890846
-
[20]
Neuromorphic Electronic Circuits for Building Autonomous Cognitive Systems,
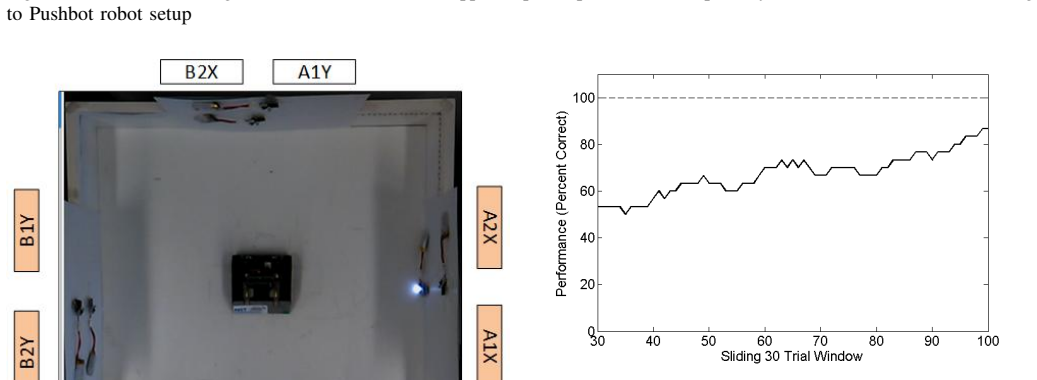
E. Chicca, F. Stefanini, C. Bartolozzi, and G. Indiveri, “Neuromorphic Electronic Circuits for Building Autonomous Cognitive Systems,” Pro- ceedings of the IEEE , vol. 102, no. 9, pp. 1367 – 1388, 2014. Fig. 15: Behavioral performance of robot during learning the context-dependant task
work page 2014
-
[21]
M. B. M. ., H. Blum, A. Dietm ¨uller, Dora, C. Sumislawska, J ¨org, G. Indiveri, and Y . Sandamirskaya, “Obstacle Avoidance and Target Acquisition For Robot Navigation Using A Mixed Signal Analog/digital Neuromorphic Processing System,” Frontiers in Neurorobotics, vol. 28, p. 11, 2017
work page 2017
-
[22]
A Model of Hippocampal Spiking Responses to Items During Learning of a Context-Dependent Task,
F. Raudies and M. E. Hasselmo, “A Model of Hippocampal Spiking Responses to Items During Learning of a Context-Dependent Task,” frontiers in System Neuroscience , vol. 23, no. 8, pp. 1–12, 2014
work page 2014
-
[23]
Robust Con- junctive Item-place Coding by Hippocampal Neurons Parallels Learning What Happens Where,
R. W. Komorowski, J. R. Manns, and H. Eichenbaum, “Robust Con- junctive Item-place Coding by Hippocampal Neurons Parallels Learning What Happens Where,” Neural Comput., vol. 29, no. 31, pp. 9918–9929, 2009
work page 2009
-
[24]
R. S. Sutton and A. G. Barto, Reinforcement Learning:An Introduction, 2nd ed. Massachusetts,US: The MIT Press Cambridge, 2018
work page 2018
-
[25]
A. Amaravati et al. , “A 55-nm, 1.0-0.4V , 1.25-pJ/MAC Time-Domain Mixed-Signal Neuromorphic Accelerator With Stochastic Synapses for Reinforcement Learning in Autonomous Mobile Robots,” IEEE Journal of Solid-State Circuits , vol. 54, no. 1, pp. 75 – 87, 2019
work page 2019
-
[26]
Learning In Silicon: A Neuromorphic Model Of The Hippocampus,
J. V . Arthur, “Learning In Silicon: A Neuromorphic Model Of The Hippocampus,” Ph.D. dissertation, Stanford, 2006
work page 2006
-
[27]
W. Gerstner and W. M. Kistler, Spiking Neuron Models:Single Neurons, Populations, Plasticity. Cambridge University Press, 2002
work page 2002
-
[28]
A. S. Cassidy, P. Merolla, J. V . Arthur, S. K. Esser, B. Jackson, R. Alvarez-Icaza, P. Datta, J. Sawada, T. M. Wong, V . Feldman, A. Amir, D. B. Rubin, F. Akopyan, E. McQuinn, W. P. Risk, and D. S. Modha, “Cognitive computing building block: A versatile and efficient digital neuron model for neurosynaptic cores,” in The 2013 International Joint Conference...
work page 2013
-
[29]
G. qiang Bi and M. ming Poo, “Synaptic Modifications in Cultured Hippocampal Neurons: Dependence on Spike Timing, Synaptic Strength, and Postsynaptic Cell Type,” Journal of Neuroscience , vol. 18, no. 24, pp. 10 464–10 472, 1998
work page 1998
-
[30]
R. M.Wang et al., “A Neuromorphic Implementation of Multiple Spike- Timing Synaptic Plasticity Rules for Large-Scale Neural Networks,” frontiers in Neuroscience, vol. 9, no. 180, pp. 1–17, 2016
work page 2016
-
[31]
A combinational digital logic approach to stdp,
A. Cassidy, A. G. Andreou, and J. Georgiou, “A combinational digital logic approach to stdp,” in 2011 IEEE International Symposium of Circuits and Systems (ISCAS) , May 2011, pp. 673–676
work page 2011
-
[32]
Navabi, Digital System Test and Testable Design
Z. Navabi, Digital System Test and Testable Design . Worcester,USA: Springer, 2011
work page 2011
-
[33]
On-chip Unsupervised Learning in Winner-Take-All Networks of Spiking Neu- rons,
R. Kreiser, T. Moraitis, Y . Sandamirskaya, and G. Indiveri, “On-chip Unsupervised Learning in Winner-Take-All Networks of Spiking Neu- rons,” in IEEE Biomedical Circuits and Systems Conference (BioCAS) , Turin, Italy, 2017
work page 2017
-
[34]
Hierarchical Models of Object Recog- nition in Cortex,
M. Riesenhuber and T. Poggio, “Hierarchical Models of Object Recog- nition in Cortex,” Nature Neuroscience, vol. 2, no. 11, pp. 1019–1025, 1999
work page 1999
-
[35]
Dynamic Neural Fields as a Step Towards Cognitive Neuromorphic Architectures,
Y . Sandamirskaya, “Dynamic Neural Fields as a Step Towards Cognitive Neuromorphic Architectures,” Frontiers in Neuroscience, vol. 7, p. 276, 2014
work page 2014
-
[36]
Digital Multiplierless Implementation of Biological Adaptive-Exponential Neuron Model,
S. Gomar and A. Ahmadi, “Digital Multiplierless Implementation of Biological Adaptive-Exponential Neuron Model,” IEEE Trans. Circuits Syst. I, vol. 61, no. 4, pp. 1206–1219, 2014
work page 2014
-
[37]
A CORDIC Based Digital Hardware For Adaptive Exponential Integrate and Fire Neuron,
M. Heidarpour, A. Ahmadi, and R. Rashidzadeh, “A CORDIC Based Digital Hardware For Adaptive Exponential Integrate and Fire Neuron,” IEEE Transactions on Circuits and Systems I: Regular Papers , vol. 63, no. 11, pp. 1986–1996, Nov 2016
work page 1986
-
[38]
Digital Multiplierless Implementation of The Biological FitzHughNagumo Model,
M.Nouri et al., “Digital Multiplierless Implementation of The Biological FitzHughNagumo Model,” Neurocomputing, vol. 165, pp. 468–476, 2015
work page 2015
-
[39]
Digital Multiplierless Realization of Two Coupled Biological Hindmarsh-Rose Neuron Model,
M. Hayati et al. , “Digital Multiplierless Realization of Two Coupled Biological Hindmarsh-Rose Neuron Model,” IEEE Trans. Circuits Syst. II, vol. 63, no. 5, pp. 463–467, 2016
work page 2016
-
[40]
Digital Implementation of Biologically Inspired Wil- son Model, Population Behavior, and Learning,
G. Karimi et al., “Digital Implementation of Biologically Inspired Wil- son Model, Population Behavior, and Learning,” International Journal of Circuit Theory and Applications , vol. 46, no. 4, pp. 965–977, 2018
work page 2018
-
[41]
Digital Mapping of a Realistic Spike Timing Plasticity Model for Real- time Neural Simulations,
B. Belhadj, J. Tomas, Y . Bornat, A. Daouzli, O. Malot, and S. Renaud, “Digital Mapping of a Realistic Spike Timing Plasticity Model for Real- time Neural Simulations,” in 24th Conf. Design Circuit Integr. Syst. (DCIS), 2009
work page 2009
-
[42]
Efficient FPGA Implementations of Pair and Triplet-Based STDP for Neuromorphic Architectures,
C. Lammie, T. J. Hamilton, A. van Schaik, and M. R. Azghadi, “Efficient FPGA Implementations of Pair and Triplet-Based STDP for Neuromorphic Architectures,” IEEE Trans. on Circuits and Systems I , vol. 66, no. 4, pp. 1558–1570, 2019
work page 2019
-
[43]
FPGA Implementation of A Biological Neural Network Based on The Hodgkin-Huxley Neuron Model,
S. Y . Bonabi et al. , “FPGA Implementation of A Biological Neural Network Based on The Hodgkin-Huxley Neuron Model,” Frontiers in Neuroscience, vol. 8, no. 379, pp. 1–12, 2014
work page 2014
-
[44]
Minitaur, An Event-Driven FPGA-Based Spiking Network Accelerator,
D. Neil and S. Liu, “Minitaur, An Event-Driven FPGA-Based Spiking Network Accelerator,” IEEE Transactions on Very Large Scale Integra- tion (VLSI) Systems , vol. 22, no. 12, pp. 2621–2628, Dec 2014
work page 2014
-
[45]
Function Approximation by Hardware Spiking Neural Network,
E. Z. Farsa, S. Nazari, and M. Gholami, “Function Approximation by Hardware Spiking Neural Network,” Journal of Computational Electron- ics, vol. 14, no. 3, pp. 707–716, 2015
work page 2015
-
[46]
https://senselab.med.yale.edu/MicrocircuitDB/showModel.cshtml? model=194882
-
[47]
An Embedded AER Dynamic Vision Sensor For Low-Latency Pole Balancing,
J. Conradt, R. Berner, M. Cook, and T. Delbruck, “An Embedded AER Dynamic Vision Sensor For Low-Latency Pole Balancing,” 2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops, pp. 780–785, 2009. [Online]. Available: http://citeseerx.ist.psu.edu
work page 2009
-
[48]
M. B. Milde et al. , “Obstacle Avoidance and Target Acquisition for Robot Navigation Using a Mixed Signal Analog/Digital Neuromorphic Processing System,” Front. Neurorobot., 2017
work page 2017
-
[49]
The Medial Temporal Lobe and Recognition Memory,
E. H, Y . A. P, and R. C, “The Medial Temporal Lobe and Recognition Memory,” Annu Rev Neurosci , vol. 30, pp. 123–152, 2007
work page 2007
-
[50]
Theta Modulation in The Medial and The Lateral Entorhinal Cortices,
S. S. Deshmukh, D. Yoganarasimha, H. V oicu, and J. J. Knierim, “Theta Modulation in The Medial and The Lateral Entorhinal Cortices,” J. Neurophysiol, vol. 104, no. 2, pp. 994–1006, 2009
work page 2009
-
[51]
J. M. Hyman, E. A. Zilli, A. M. Paley, , and M. E. Hasselmo, “Working Memory Performance Correlates With Prefrontal-Hippocampal Theta Interactions But not With Prefrontal Neuron Firing Rates,” Front. Integr. Neurosci, vol. 4, no. 2, 2010
work page 2010
-
[52]
Spaces Within Spaces: Rat Parietal Cortex Neurons Register Position Across Three Reference Frames,
D. A. Nitz, “Spaces Within Spaces: Rat Parietal Cortex Neurons Register Position Across Three Reference Frames,” Nat. Neurosci, vol. 15, pp. 1365–1367, 2012. Hajar Asgari received the M.Sc. degree in electrical engineering from Shahid Chamran University of Ahvaz, in 2013 and is a Ph.D. student in electri- cal engineering at Shahhid Beheshti University of ...
work page 2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.