FORESEE: A Cooperative Lane Change Model for Connected and Automated Driving
Pith reviewed 2026-06-25 22:16 UTC · model grok-4.3
The pith
FORESEE uses V2X data to organize lane changes by desired speeds, raising average vehicle speeds and energy efficiency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
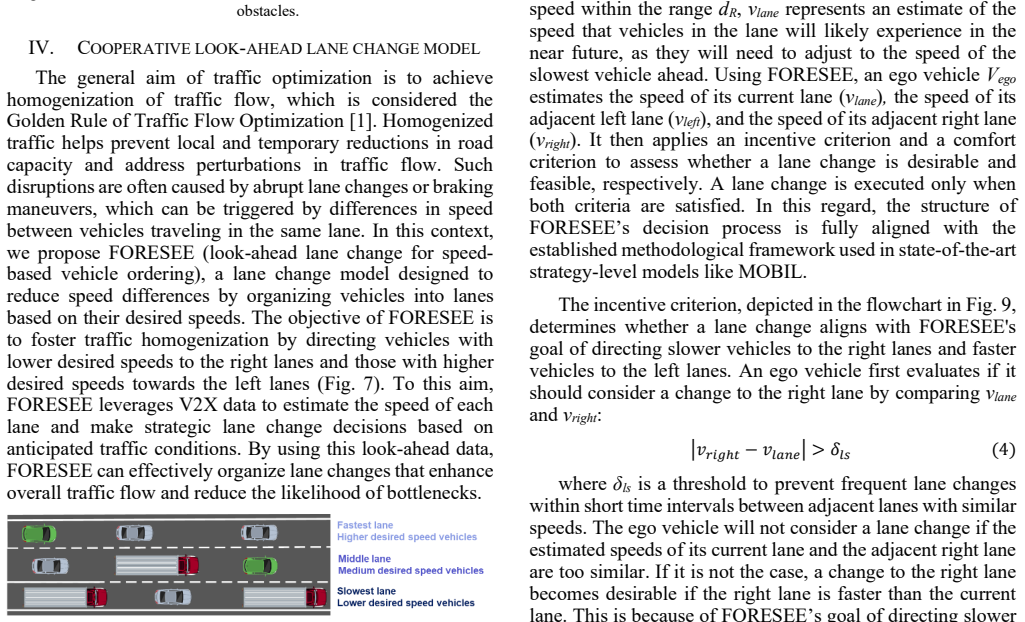
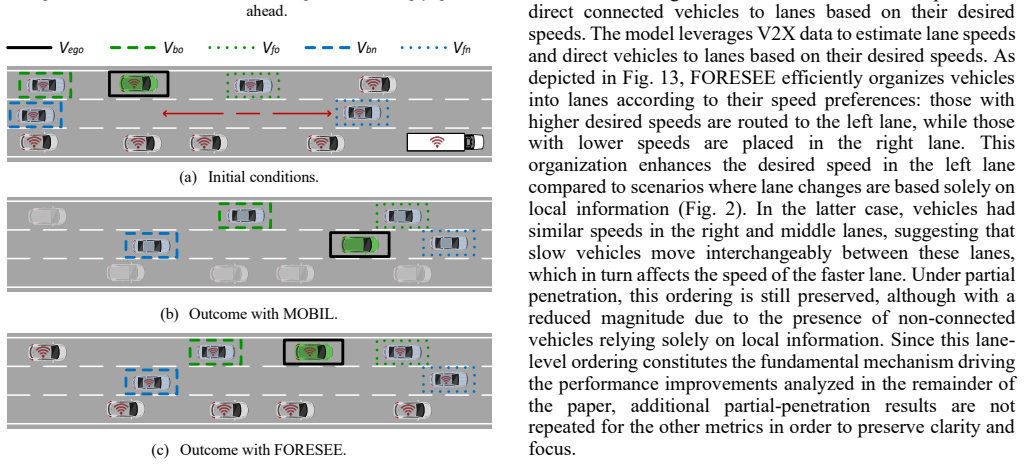
FORESEE organizes vehicles into lanes based on desired speeds by using V2X data to anticipate upcoming traffic conditions. This produces fewer but more effective lane changes than non-cooperative methods that rely on short-term local information. The result is higher average vehicle speeds, improved energy efficiency, speeds maintained closer to desired values with less fluctuation, greater comfort, and improved management of disturbances such as obstacles.
What carries the argument
FORESEE, the cooperative lane change model that uses anticipated V2X data to group vehicles by desired speeds and thereby homogenize traffic flow.
If this is right
- Vehicles reach higher average speeds.
- Energy consumption per distance traveled decreases.
- Speed and acceleration fluctuations drop, raising comfort.
- Obstacles and other disturbances are handled with less disruption because changes are planned ahead.
- Traffic flow becomes more uniform within lanes.
Where Pith is reading between the lines
- The same anticipation principle could be applied to other maneuvers such as merging or gap creation.
- In mixed fleets of automated and human-driven vehicles the model might reduce the frequency of forced lane changes by human drivers.
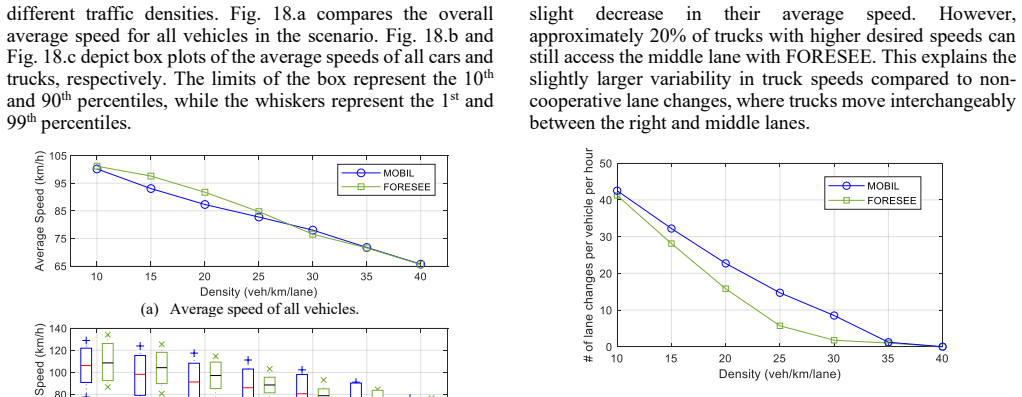
- Road operators could use similar V2X coordination to influence overall lane utilization without direct vehicle control.
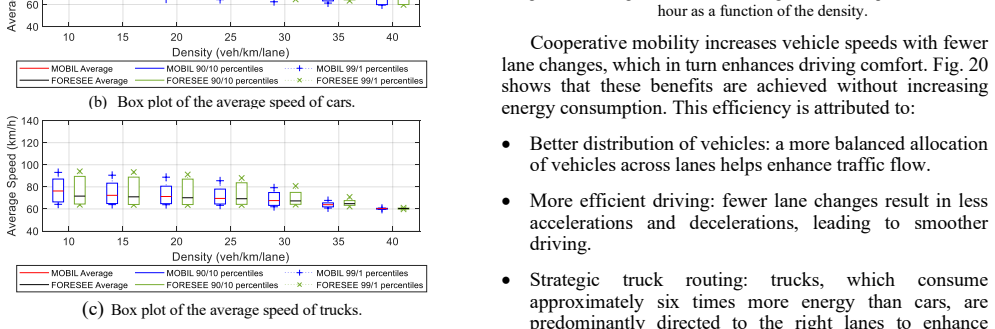
- The approach implies that communication range and prediction horizon become key design parameters for future automated driving systems.
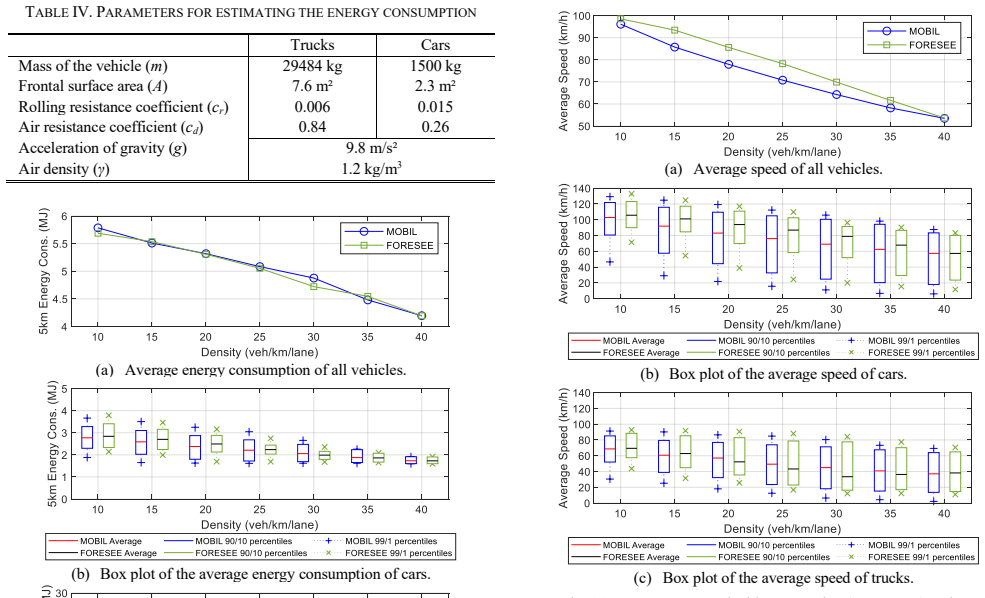
Load-bearing premise
V2X data will be accurate and timely enough to predict traffic conditions and coordinate lane changes without creating new conflicts or disturbances.
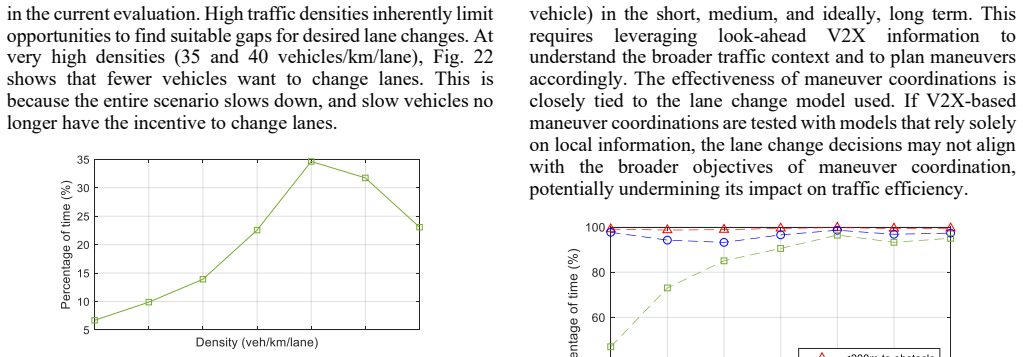
What would settle it
A controlled simulation or field test in which vehicles using FORESEE show equal or lower average speeds and energy efficiency than vehicles using non-cooperative lane changes when obstacles or large speed differences are present.
Figures

read the original abstract
This paper presents FORESEE, a novel cooperative lane change model for connected and automated driving. FORESEE leverages Vehicle-to-Everything (V2X) data to anticipate traffic conditions and effectively organize lane changes. Specifically, it uses V2X data to organize vehicles into lanes based on their desired speeds, which helps to homogenize traffic flow and reduce disturbances caused by speed differences among vehicles within the same lane. The study demonstrates that implementing cooperative lane changes with FORESEE enhances average vehicle speed and energy efficiency compared to non-cooperative lane changes, which typically rely on short-term and local information about the ego vehicle and its immediate neighbors. This is achieved through fewer but more effective lane changes. Additionally, vehicles can maintain speeds closer to their desired speeds, resulting in fewer fluctuations in speed and acceleration and enhanced driving comfort. Moreover, cooperative lane changes can better manage road traffic disturbances, such as obstacles, by anticipating traffic conditions and organizing lane changes ahead. FORESEE serves as a valuable framework for the future design and testing of V2X-based maneuver coordinations as their effectiveness depends on how vehicles change lanes and their ability to plan and organize maneuvers in consideration of the upcoming traffic conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents FORESEE, a cooperative lane change model for connected and automated driving that uses V2X data to anticipate traffic conditions and organize vehicles into lanes according to desired speeds. It claims this homogenizes flow, reduces disturbances, and yields higher average speeds, improved energy efficiency, greater comfort, and better obstacle handling than non-cooperative local lane changes, achieved via fewer but more effective maneuvers.
Significance. If the claimed benefits are shown to hold under realistic conditions, the work could supply a useful framework for V2X-enabled maneuver coordination, emphasizing long-horizon planning over short-term local decisions. The focus on speed-homogenization addresses a practical issue in mixed CAV traffic.
major comments (3)
- [Abstract] Abstract: the performance claims (enhanced speed, energy efficiency, comfort) are asserted without any description of simulation setup, traffic scenarios, metrics, baselines, or validation procedures, so it is impossible to determine whether the data or methods support the central claim.
- [Model description (likely §3)] Model and assumptions: the central claim requires that V2X enables reliable anticipation and lane organization by desired speeds without introducing new conflicts; no section examines the model under realistic communication impairments (latency, packet loss, errors), which could produce mis-timed changes and increase rather than decrease speed fluctuations relative to the local baseline.
- [Evaluation (likely §4)] Evaluation: the assertions of fewer but more effective lane changes and improved disturbance management lack quantitative results, statistical comparisons, or sensitivity analysis, leaving the magnitude and robustness of the reported gains unassessable.
minor comments (1)
- [Abstract] Abstract: a single sentence summarizing the evaluation methodology would help readers assess the strength of the claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback highlighting areas for improved clarity and completeness. We address each major comment below with proposed revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the performance claims (enhanced speed, energy efficiency, comfort) are asserted without any description of simulation setup, traffic scenarios, metrics, baselines, or validation procedures, so it is impossible to determine whether the data or methods support the central claim.
Authors: We agree the abstract is high-level and would benefit from additional context. The full manuscript details the evaluation in Section 4, including the SUMO-based simulation setup, multi-lane highway scenarios with varying densities, metrics (average speed, energy consumption, acceleration variance for comfort), non-cooperative baseline, and validation via repeated runs. We will revise the abstract to briefly summarize the simulation framework, scenarios, and quantitative support for the claims. revision: yes
-
Referee: [Model description (likely §3)] Model and assumptions: the central claim requires that V2X enables reliable anticipation and lane organization by desired speeds without introducing new conflicts; no section examines the model under realistic communication impairments (latency, packet loss, errors), which could produce mis-timed changes and increase rather than decrease speed fluctuations relative to the local baseline.
Authors: The model description assumes reliable V2X as is standard for initial cooperative frameworks. We did not evaluate under impairments such as latency or packet loss. We will add a dedicated discussion subsection on communication assumptions, potential risks of impairments, and mitigation strategies (e.g., fallback mechanisms), while noting this as a direction for future robustness analysis. revision: partial
-
Referee: [Evaluation (likely §4)] Evaluation: the assertions of fewer but more effective lane changes and improved disturbance management lack quantitative results, statistical comparisons, or sensitivity analysis, leaving the magnitude and robustness of the reported gains unassessable.
Authors: Section 4 reports quantitative simulation results on lane change counts, speed homogeneity, energy efficiency, and obstacle handling with direct baseline comparisons. To address the concern, we will augment the section with statistical measures (e.g., confidence intervals across runs), significance testing, and sensitivity analysis to parameters such as V2X range and traffic density. revision: yes
Circularity Check
No derivation chain or equations present; claims are descriptive and simulation-based
full rationale
The provided abstract and description introduce FORESEE as a V2X-based cooperative lane change model that organizes vehicles by desired speeds to homogenize flow. No equations, first-principles derivations, fitted parameters, predictions, or self-citations appear in the text. The central claims concern comparative simulation outcomes (higher speed, efficiency, fewer lane changes) versus non-cooperative baselines; these are empirical results, not reductions of outputs to inputs by construction. No load-bearing steps exist to inspect for circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Traffic flow dynamics. Traffic Flow Dynamics: Data, Models and Simulation
M. Treiber, A. Kesting, “Traffic flow dynamics. Traffic Flow Dynamics: Data, Models and Simulation”, Springer Berlin, Heidelberg, ISBN 978-3-642-32459-8, 2013
2013
-
[2]
Congested traffic states in empirical observations and microscopic simulations,
M. Treiber, et al., “Congested traffic states in empirical observations and microscopic simulations,” Physical Review E , vol. 62, pp 1805 – 1824, Dec. 2000
2000
-
[3]
Dynamical model of traffic congestion and numerical simulation,
M. Bando et al. "Dynamical model of traffic congestion and numerical simulation," Physical review E 51.2, 1995
1995
-
[4]
Full velocity difference model for a car- following theory
R. Jiang, Q. Wu, and Z. Zhu. "Full velocity difference model for a car- following theory." Physical Review E 64.1, 2001
2001
-
[5]
Lane Change and Merge Maneuvers for Connected and Automated Vehicles: A Survey,
D. Bevly et al., "Lane Change and Merge Maneuvers for Connected and Automated Vehicles: A Survey," in IEEE Transactions on Intelligent Vehicles, vol. 1, no. 1, pp. 105-120, Mar. 2016
2016
-
[6]
A Cooperative Lane Change Model for Connected and Automated Vehicles,
T. Li et al., "A Cooperative Lane Change Model for Connected and Automated Vehicles," in IEEE Access, vol. 8, pp. 54940 -54951, Mar. 2020
2020
-
[7]
Lane Change in Automated Driving: An Explicit Coordination Strategy,
A. Falsone, B. Melani and M. Prandini, "Lane Change in Automated Driving: An Explicit Coordination Strategy," IEEE Control Systems Letters, vol. 7, pp. 205-210, 2023
2023
-
[8]
Modeling risk potential fields for mandatory lane changes in intelligent connected vehicle environment,
Y. Wang, N. Lyu, and J. Wen, “Modeling risk potential fields for mandatory lane changes in intelligent connected vehicle environment,” Expert Systems with Applications, vol. 255, part D, p. 124814, 2024
2024
-
[9]
General lane-changing model MOBIL for car -following models
A. Kesting, M. Treiber and D. Helbing. "General lane-changing model MOBIL for car -following models." Transportation Research Record 1999.1, pp. 86-94, 2007
1999
-
[10]
Ego -efficient lane changes of connected and automated vehicles with impacts on traffic flow
Y. Wang et al., “Ego -efficient lane changes of connected and automated vehicles with impacts on traffic flow”, in Transportation Research Part C: Emerging Technologies, Volume 138, Apr. 2022
2022
-
[11]
PPDR: A Privacy -Preserving Dual Reputation Management Scheme in Vehicle Platoon,
Y. Sun et al., "PPDR: A Privacy -Preserving Dual Reputation Management Scheme in Vehicle Platoon," in IEEE Transactions on Dependable and Secure Computing , vol. 22, no. 6, pp. 6636 -6652, Nov.-Dec. 2025
2025
-
[12]
Non -local Evasive Overtaking of Downstream Incidents in Distributed Behavior Planning of Connected Vehicles,
A. R. Kreidieh, Y. Farid and K. Oguchi, "Non -local Evasive Overtaking of Downstream Incidents in Distributed Behavior Planning of Connected Vehicles," 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, Jul. 2022
2022
-
[13]
Lane assignment of connected vehicles via a hierarchical system,
A. R. Kreidieh, Y. Z. Farid and K. Oguchi, "Lane assignment of connected vehicles via a hierarchical system," 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, Oct. 2022
2022
-
[14]
Decentralized Cooperative Lane -Changing Decision -Making for Connected Autonomous Vehicles,
J. Nie, J. Zhang, W. Ding, X. Wan, X. Chen and B. Ran, "Decentralized Cooperative Lane -Changing Decision -Making for Connected Autonomous Vehicles," in IEEE Access, vol. 4, pp. 9413-9420, 2016
2016
-
[15]
Cooperative Look-Ahead Lane Change System for Improving Driving Intelligence of Automated Vehicles in Critical Scenarios,
M. A. S. Kamal, A. S. M. Bakibillah, T. Hayakawa, K. Yamada and J. Imura, "Cooperative Look-Ahead Lane Change System for Improving Driving Intelligence of Automated Vehicles in Critical Scenarios," in IEEE Transactions on Intelligent Vehicles, vol. 9, no. 9, pp. 5876-5888, Sept. 2024
2024
-
[16]
An efficient cooperative lane - changing algorithm for sensor- and communication-enabled automated vehicles,
T. Awal, M. Murshed and M. Ali, "An efficient cooperative lane - changing algorithm for sensor- and communication-enabled automated vehicles," 2015 IEEE Intelligent Vehicles Symposium (IV) , Seoul, Korea (South), Jul. 2015
2015
-
[17]
A Survey on Cooperative Architectures and Maneuvers for Connected and Automated Vehicles,
B. Häfner, V. Bajpai, J. Ott and G. A. Schmitt, "A Survey on Cooperative Architectures and Maneuvers for Connected and Automated Vehicles," in IEEE Communications Surveys & Tutorials, vol. 24, no. 1, pp. 380-403, Firstquarter 2022
2022
-
[18]
Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,
H. Arbabi and Michele C. Weigle, “Highway Mobility and Vehicular Ad-Hoc Networks in ns-3,” Proc. of the Winter Simulation Conference. Baltimore, MD, Dec. 2010
2010
-
[19]
Cooperative Damping of Lane -change-induced Disturbances via Local Density Reduction,
Y. Farid, S. Avedisov, O. Altintas and K. Oguchi, "Cooperative Damping of Lane -change-induced Disturbances via Local Density Reduction," 2023 8th International Conference on Models and Technologies for Intelligent Transportation Systems (MT -ITS), Nice, France, Jun. 2023
2023
-
[20]
Optimal Gear Shift Schedule Design for Automated Vehicles: Hybrid System Based Analytical Approach,
C. R. He, W. B. Qin, N. Ozay and G. Orosz, "Optimal Gear Shift Schedule Design for Automated Vehicles: Hybrid System Based Analytical Approach," in IEEE Transactions on Control Systems Technology, vol. 26, no. 6, pp. 2078-2090, Nov. 2018
2078
-
[21]
On the Impact of V2X-based Maneuver Coordination on the Traffic,
A. Correa et al., "On the Impact of V2X-based Maneuver Coordination on the Traffic," 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, Arp. 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.