Scalable Reachability Analysis of Linear Continuous Systems with Property-Driven Time-Step Adaptation
Pith reviewed 2026-06-26 01:09 UTC · model grok-4.3
The pith
Adapting time steps to the safety property lets linear system reachability use larger steps while still proving safety.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
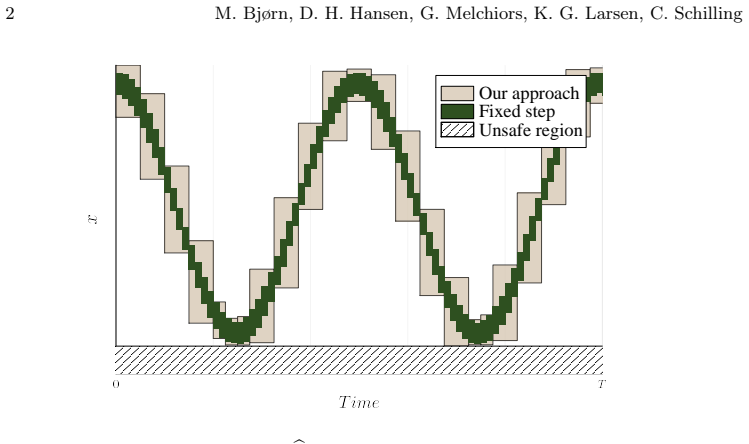
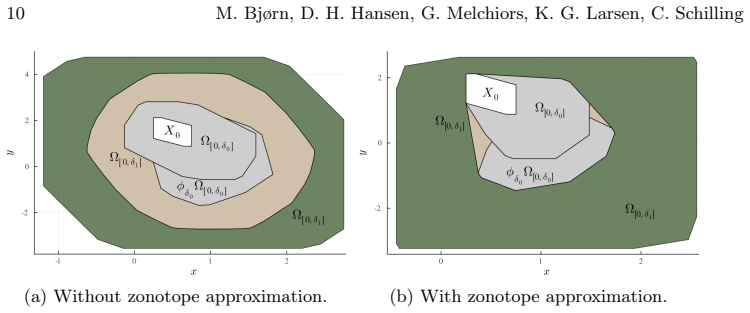
The algorithm selects the largest possible time step such that safety can still be proved for the given property. Optimizations prevent repeated expensive matrix exponential recomputation during discretization and maintain a careful balance between state and input approximation errors. These choices together produce only moderate over-approximation even when steps are enlarged, so far fewer steps suffice compared with fixed-step or error-driven methods, and the approach scales to large benchmark problems where it outperforms existing state-of-the-art reachability tools.
What carries the argument
Property-driven time-step adaptation that enlarges the step to the maximum value still allowing a safety proof.
If this is right
- Reachability analysis finishes in fewer discretization steps for the same safety query.
- Verification remains sound while using larger steps than error-only adaptation permits.
- The same optimizations apply to other linear-system tools that rely on matrix exponentials.
- Benchmark performance improves without changing the underlying continuous-time model.
Where Pith is reading between the lines
- The same property-driven logic could be tested on systems whose inputs are not bounded but described by other constraints.
- Integration with existing hybrid-system verifiers might reuse the step-selection routine without reimplementing discretization.
- If the error-balance rule generalizes, similar adaptation could reduce step counts in related analyses such as stability checking.
Load-bearing premise
The chosen balance between state and input error bounds stays sound and does not hide unsafe behavior when time steps grow larger.
What would settle it
Run the algorithm on a linear system known to violate safety; if it reports safety or if the reported reachable set is smaller than the true reachable set on any SLICOT instance, the claim fails.
Figures
read the original abstract
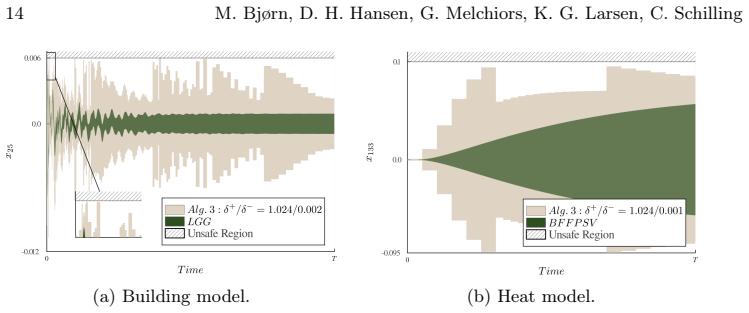
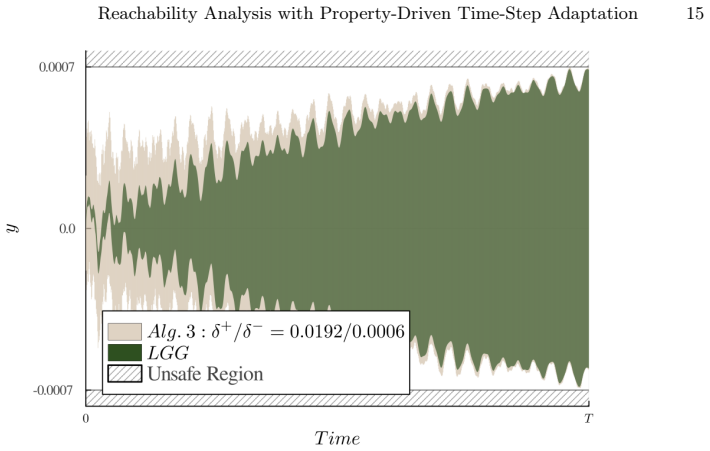
We study safety verification for linear time-invariant systems with bounded inputs in continuous time. The standard approach reduces to a reachability analysis in two steps: first discretize time and then apply a forward analysis in the discretized system. Existing algorithms use either a fixed time step or an adaptive time step that changes based on the approximation error compared to the underlying continuous system. In this paper, we present an efficient reachability algorithm that adapts the time step based on a given safety property. Essentially, our algorithm makes the largest possible time step such that it can still prove safety. For this approach to be scalable in practice, we discuss several optimizations such as avoiding the repeated expensive calculation of the matrix exponential during discretization and a careful balance how we tame the approximation error stemming from the states and the inputs. This allows our algorithm to yield a moderate approximation error even when using a large time step, thus requiring much fewer steps than prior algorithms. We demonstrate the effectiveness and scalability on the large-scale SLICOT benchmark suite, where our algorithm consistently outperforms other state-of-the-art approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a reachability analysis algorithm for safety verification of linear time-invariant continuous-time systems with bounded inputs. It replaces fixed or error-driven time-step adaptation with a property-driven rule that selects the largest admissible time step still permitting a safety proof. The approach includes optimizations such as matrix-exponential caching and a tuned split between state and input approximation errors; the authors report that this yields moderate over-approximation error with far fewer steps than prior methods and demonstrate consistent outperformance on the SLICOT benchmark suite.
Significance. If the soundness of the property-driven adaptation rule is established, the method could materially improve the scalability of reachability-based verification for high-dimensional linear systems by reducing the number of discretization steps while preserving the ability to certify safety. The reported benchmark scaling and the explicit handling of input versus state error are practical strengths.
major comments (2)
- [§4] §4 (Property-Driven Time-Step Adaptation): the central claim that the algorithm selects the largest time step still allowing a safety proof rests on a 'careful balance' between state and input approximation errors. No derivation or inductive argument is supplied showing that this balance preserves the containment relation (reachable set of the continuous system contained in the computed over-approximation) when the step size is chosen from the property rather than from a uniform error bound; without such an argument the safety conclusion is not guaranteed.
- [§4.2] §4.2 (Error Propagation): the split of the discretization error into state and input components is described algorithmically but the recurrence that propagates these errors across variable-length steps is not stated explicitly. If any cross-term arising from the product of the state-transition matrix with the input-error set is omitted, the over-approximation may fail to contain the true reachable set precisely when the time step is enlarged.
minor comments (2)
- [Abstract, §1] The abstract and §1 repeatedly use the phrase 'moderate approximation error' without a quantitative definition; a short paragraph relating this phrase to the concrete Hausdorff-distance or support-function bounds used later would improve clarity.
- [Table 1] Table 1 (SLICOT results) reports run-times and step counts but does not list the final over-approximation diameters or the safety margins; adding these quantities would allow readers to judge whether the larger steps actually preserve useful tightness.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. The two major points both concern the rigor of the soundness argument for the property-driven step-size rule; we address them directly below and will strengthen the presentation accordingly.
read point-by-point responses
-
Referee: [§4] §4 (Property-Driven Time-Step Adaptation): the central claim that the algorithm selects the largest time step still allowing a safety proof rests on a 'careful balance' between state and input approximation errors. No derivation or inductive argument is supplied showing that this balance preserves the containment relation (reachable set of the continuous system contained in the computed over-approximation) when the step size is chosen from the property rather than from a uniform error bound; without such an argument the safety conclusion is not guaranteed.
Authors: We agree that an explicit inductive argument is required. The current manuscript only sketches the error-balancing condition; it does not contain a formal lemma proving that the containment relation is preserved when the step size is selected from the safety property. In the revision we will insert a new lemma (and its proof) in §4 that proceeds by induction over the sequence of (variable-length) steps, using the stated balance between state and input errors to show that the over-approximation remains valid at every step. revision: yes
-
Referee: [§4.2] §4.2 (Error Propagation): the split of the discretization error into state and input components is described algorithmically but the recurrence that propagates these errors across variable-length steps is not stated explicitly. If any cross-term arising from the product of the state-transition matrix with the input-error set is omitted, the over-approximation may fail to contain the true reachable set precisely when the time step is enlarged.
Authors: The referee is correct that the recurrence is only given algorithmically. The manuscript does not display the explicit recurrence relation that includes the cross-term arising from the state-transition matrix acting on the input-error set. We will add the full recurrence (with the cross-term made explicit) to §4.2 and verify that the over-approximation operator used in the implementation matches this recurrence. revision: yes
Circularity Check
No circularity: algorithmic method with independent optimizations
full rationale
The paper describes an algorithmic reachability procedure for linear systems that selects time steps based on a safety property rather than uniform error bounds. No equations, parameter fits, or self-citations appear in the abstract or description that would reduce any claimed result to its own inputs by construction. The central contribution consists of standard discretization steps plus practical optimizations (matrix-exponential caching and error balancing), all of which remain externally verifiable against benchmarks and do not rely on self-referential definitions or renamings.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Althoff, M., Frehse, G.: Combining zonotopes and support functions for efficient reachability analysis of linear systems. In: CDC. pp. 7439–7446. IEEE (2016). https://doi.org/10.1109/CDC.2016.7799418
-
[2]
Althoff, M., Frehse, G., Girard, A.: Set propagation techniques for reachability analysis. Annu. Rev. Control. Robotics Auton. Syst.4, 369–395 (2021). https: //doi.org/10.1146/ANNUREV-CONTROL-071420-081941
-
[3]
Althoff, M., Stursberg, O., Buss, M.: Reachability analysis of linear systems with uncertain parameters and inputs. In: CDC. pp. 726–732. IEEE (2007). https://doi. org/10.1109/CDC.2007.4434084
-
[4]
Bak, S., Duggirala, P.S.: Simulation-equivalent reachability of large linear systems with inputs. In: CAV. pp. 401–420. LNCS, Springer (2017). https://doi.org/10. 1007/978-3-319-63387-9_20
2017
-
[5]
Bogomolov, S., Forets, M., Frehse, G., Podelski, A., Schilling, C.: Decomposing reach set computations with low-dimensional sets and high-dimensional matrices (extended version). Inf. Comput.289(2022). https://doi.org/10.1016/j.ic.2022. 104937
-
[6]
Bogomolov, S., Forets, M., Frehse, G., Potomkin, K., Schilling, C.: JuliaReach: a toolbox for set-based reachability. In: HSCC. pp. 39–44. ACM (2019). https: //doi.org/10.1145/3302504.3311804
-
[7]
Acta Informatica61(3), 231–260 (2024)
Chen, S., Ge, X.: Reachability analysis of linear systems. Acta Informatica61(3), 231–260 (2024). https://doi.org/10.1007/S00236-024-00458-8
-
[8]
Dantam, M., Pouly, A.: On the decidability of reachability in continuous time linear time-invariant systems. In: HSCC. pp. 15:1–15:12. ACM (2021). https://doi.org/ 10.1145/3447928.3456705
-
[9]
Dooren, Y.C.P.V.: A collection of benchmark examples for model reduction of linear time invariant dynamical systems (2002)
2002
-
[10]
Forets, M., Schilling, C.: Conservative time discretization: A comparative study. In: iFM. LNCS, vol. 13274, pp. 149–167. Springer (2022). https://doi.org/10.1007/ 978-3-031-07727-2_9
2022
-
[11]
Frehse, G., Guernic, C.L., Donzé, A., Cotton, S., Ray, R., Lebeltel, O., Ripado, R., Girard, A., Dang, T., Maler, O.: SpaceEx: Scalable verification of hybrid systems. In: CAV. pp. 379–395. LNCS, Springer (2011). https://doi.org/10.1007/978-3-642- 22110-1_30
- [12]
-
[13]
Girard,A.:Reachabilityofuncertainlinearsystemsusingzonotopes.In:HSCC.pp. 291–305. LNCS, Springer (2005). https://doi.org/10.1007/978-3-540-31954-2_19
-
[14]
Girard, A., Guernic, C.L., Maler, O.: Efficient computation of reachable sets of linear time-invariant systems with inputs. In: HSCC. pp. 257–271. LNCS, Springer (2006). https://doi.org/10.1007/11730637_21
-
[15]
Guernic, C.L., Girard, A.: Reachability analysis of hybrid systems using support functions. In: CAV. pp. 540–554. LNCS, Springer (2009). https://doi.org/10.1007/ 978-3-642-02658-4_40
2009
-
[16]
https://doi.org/10.5281/zenodo.20793291 18 M
Hansen, D.H., Melchiors, G., Bjørn, M.: Kyniker/adaptive-algorithm-for-linear- system: React (2026). https://doi.org/10.5281/zenodo.20793291 18 M. Bjørn, D. H. Hansen, G. Melchiors, K. G. Larsen, C. Schilling
-
[17]
Non- linear Analysis: Hybrid Systems53, 101491 (2024)
Kochdumper, N., Bak, S.: Fully automated verification of linear time-invariant systems against signal temporal logic specifications via reachability analysis. Non- linear Analysis: Hybrid Systems53, 101491 (2024). https://doi.org/https://doi. org/10.1016/j.nahs.2024.101491
-
[18]
Kopetzki, A., Schürmann, B., Althoff, M.: Methods for order reduction of zono- topes. In: CDC. pp. 5626–5633. IEEE (2017). https://doi.org/10.1109/CDC.2017. 8264508
-
[19]
Lafferriere, G., Pappas, G.J., Yovine, S.: Symbolic reachability computation for families of linear vector fields. J. Symb. Comput.32(3), 231–253 (2001). https: //doi.org/10.1006/JSCO.2001.0472
-
[20]
Nonlinear Analysis: Hybrid Systems4(2), 250–262 (2010)
Le Guernic, C., Girard, A.: Reachability analysis of linear systems using support functions. Nonlinear Analysis: Hybrid Systems4(2), 250–262 (2010). https://doi. org/https://doi.org/10.1016/j.nahs.2009.03.002, iFAC World Congress 2008
-
[21]
Luo, E., Kochdumper, N., Bak, S.: Reachability analysis for linear systems with uncertain parameters using polynomial zonotopes. In: HSCC. pp. 17:1–17:12. ACM (2023). https://doi.org/10.1145/3575870.3587130
-
[22]
Prabhakar, P., Viswanathan, M.: A dynamic algorithm for approximate flow com- putations. In: HSCC. pp. 133–142. ACM (2011). https://doi.org/10.1145/1967701. 1967722
-
[23]
Tran, H., Nguyen, L.V., Johnson, T.T.: Large-scale linear systems from order- reduction. In: ARCH. pp. 60–67. EPiC Series in Computing, EasyChair (2016). https://doi.org/10.29007/XK7X
-
[24]
Wetzlinger, M., Althoff, M.: Backward reachability analysis of perturbed continuous-time linear systems using set propagation. IEEE Trans. Autom. Con- trol.71(1), 352–367 (2026). https://doi.org/10.1109/TAC.2025.3592719
-
[25]
Wetzlinger, M., Kochdumper, N., Bak, S., Althoff, M.: Fully automated verification of linear systems using inner and outer approximations of reachable sets. IEEE Trans. Autom. Control.68(12), 7771–7786 (2023). https://doi.org/10.1109/TAC. 2023.3292008
work page doi:10.1109/tac 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.