DNN Koopman-Based Deviation Compensation for UGV Path Tracking Control on Coupled Slope and Potholed Road
Pith reviewed 2026-06-26 21:07 UTC · model grok-4.3
The pith
A DNN Koopman deviation compensator paired with Laguerre MPC and event-triggered activation improves UGV path tracking by more than 11.5 percent on coupled slopes and potholed roads.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By integrating Koopman operator theory with a deep neural network, the DNN Koopman method models pothole-induced path deviations and, when coupled to the LMPC through an event-triggered parallel cooperative mechanism based on activation criteria and credibility verification, raises path tracking accuracy on potholed roads while keeping overall steering commands feasible and vehicle dynamics stable.
What carries the argument
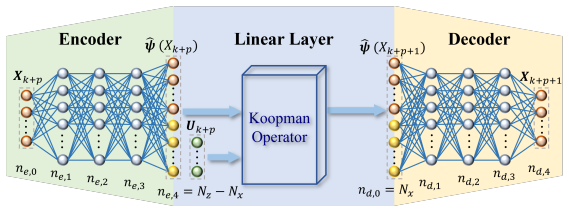
The DNN Koopman (DK) path deviation compensation method, which learns a lifted linear representation of nonlinear pothole effects to generate corrective actions that are selectively applied by the event-triggered mechanism.
If this is right
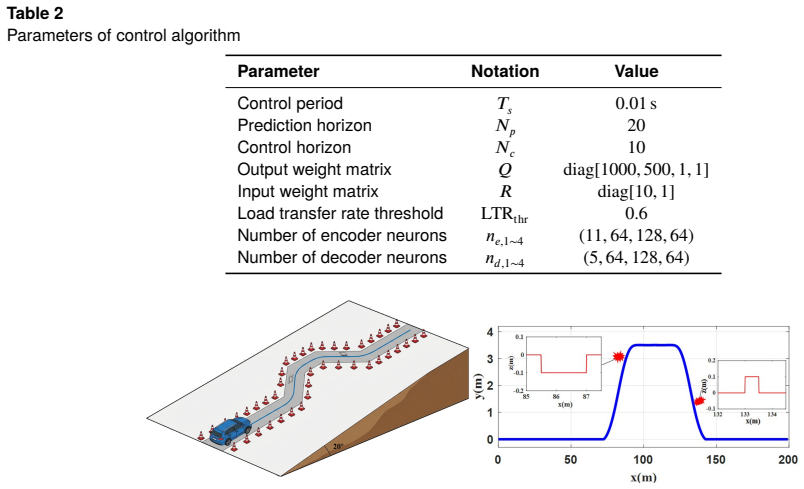
- Laguerre functions embedded in the MPC reduce the number of decision variables while preserving tracking on coupled slopes.
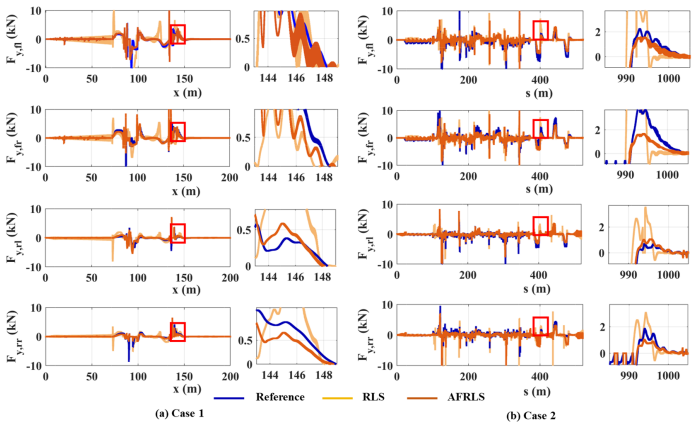
- The adaptive forgetting recursive least squares estimator supplies updated tire stiffness values that keep the LMPC model accurate across slope changes.
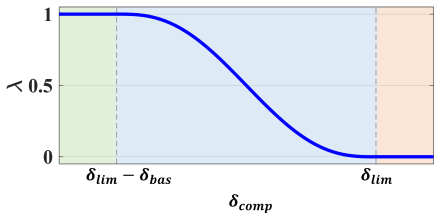
- The credibility verification step in the EPC mechanism prevents unsafe compensation activations.
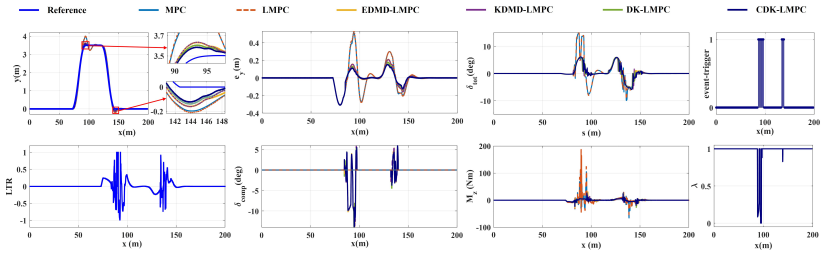
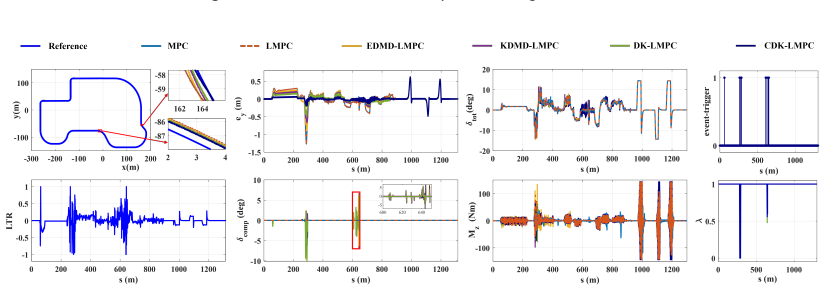
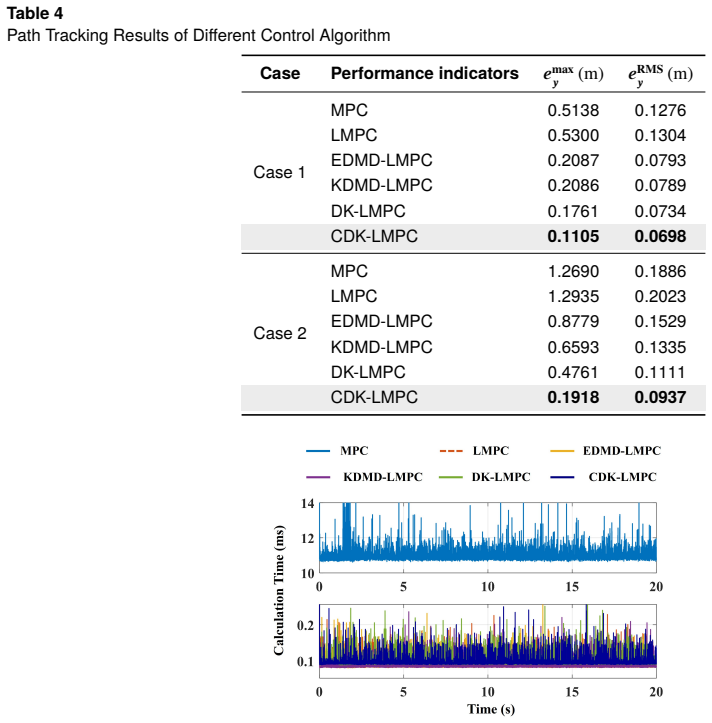
- Overall closed-loop tracking error decreases by more than 11.5 percent relative to the baseline LMPC alone across the tested operating conditions.
Where Pith is reading between the lines
- If the Koopman lifting functions prove reusable across vehicle platforms, the same DK compensator could be transferred with modest retraining.
- The event-triggered structure suggests a natural way to layer additional disturbance-specific compensators without continuous computational overhead.
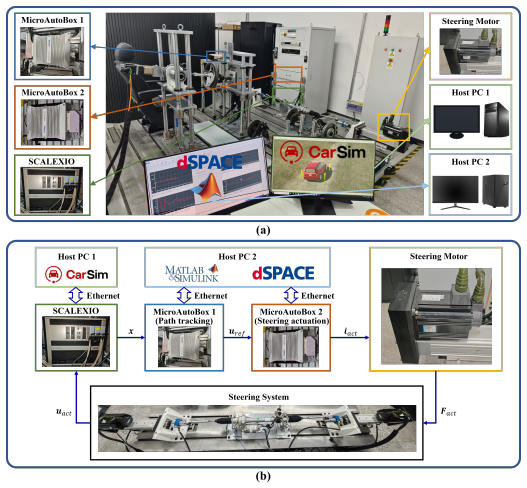
- Real-vehicle validation on physical potholed slopes would test whether HiL results translate when actuator delays and sensor noise are present.
Load-bearing premise
The DNN Koopman model trained on the collected data will produce compensation signals that remain within stability and feasibility bounds for pothole disturbances not seen during training.
What would settle it
A hardware-in-the-loop run on a previously unseen pothole pattern in which the event-triggered DK activation produces a steering command that drives lateral error outside the LMPC feasible set or causes yaw-rate instability.
Figures
read the original abstract
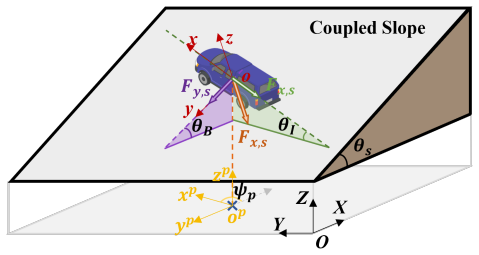
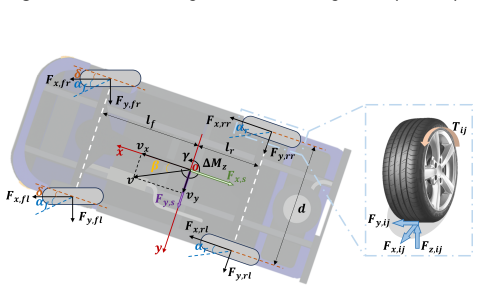
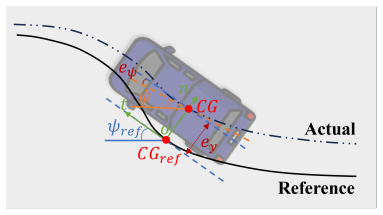
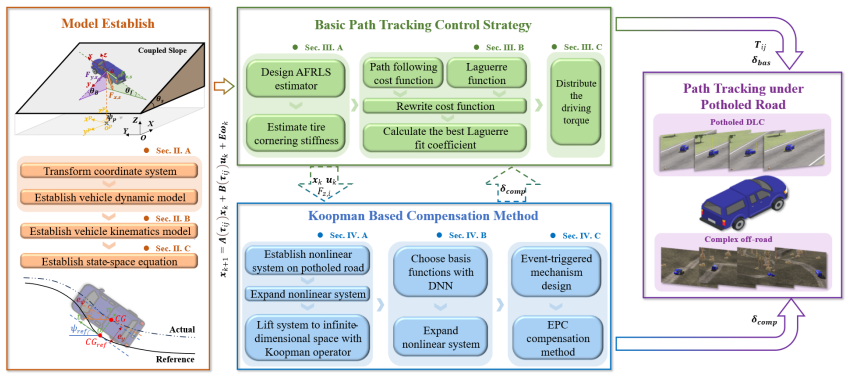
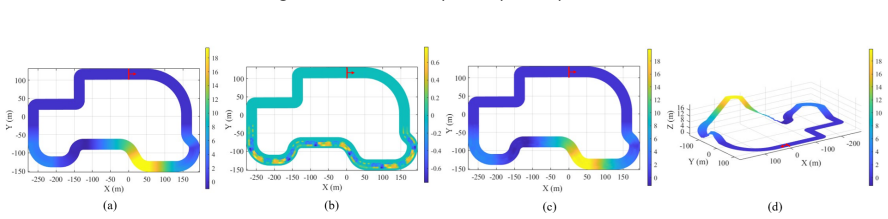
Unmanned ground vehicles (UGVs) operating in off-road scenarios are confronted with complex terrain disturbances that can substantially degrade path tracking performance. To address this challenge, this paper proposes a deep neural network (DNN) Koopman-based deviation compensation strategy for UGV path tracking control. Firstly, based on the vehicle dynamic function on coupled slope, an adaptive forgetting recursive least squares method with decoupled error terms is designed to estimate tire cornering stiffness. On this basis, a Laguerre model predictive control (LMPC) path tracking control strategy is designed by incorporating Laguerre functions, which can reduce computational resource usage while maintaining reliable tracking performance across different coupled slope scenarios. Then, by integrating Koopman operator theory with DNN, a DNN Koopman (DK) path deviation compensation method is proposed, which significantly improves the path tracking accuracy of UGV under potholed road disturbances. Furthermore, an event-triggered parallel cooperative (EPC) compensation mechanism that couples LMPC with DK is established based on compensation activation criteria and credibility verification. This mechanism improves path tracking accuracy on potholed road while ensuring the feasibility of overall steering command and stability of vehicle after DK compensation. Finally, a hardware-in-the-loop (HiL) experimental platform is constructed for validation. Experimental results demonstrate that the proposed UGV path tracking strategy improves tracking performance by more than 11.5% across multiple operating conditions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a DNN Koopman-based deviation compensation strategy for UGV path tracking control on coupled slope and potholed roads. It designs an adaptive forgetting recursive least squares method for tire cornering stiffness estimation, a Laguerre model predictive control (LMPC) strategy, a DNN Koopman (DK) compensation method, and an event-triggered parallel cooperative (EPC) mechanism that couples LMPC with DK using compensation activation criteria and credibility verification. Validation is performed on a hardware-in-the-loop platform, claiming more than 11.5% improvement in tracking performance across multiple conditions.
Significance. If the claims hold, particularly the generalization of the DK model and the stability guarantees under the EPC mechanism, this work could contribute to robust control strategies for UGVs in challenging off-road environments by combining data-driven Koopman operators with model predictive control and event-triggering to handle disturbances while preserving feasibility. The use of HiL experiments provides practical validation.
major comments (2)
- [Abstract] Abstract: The headline claim of more than 11.5% improvement depends on the DK compensator producing corrections that the LMPC can absorb without violating steering feasibility or vehicle stability when the EPC trigger fires. However, no quantitative bounds on the approximation error of the Koopman lift or explicit stability certificate for the switched system are provided.
- [DNN Koopman and EPC mechanism] DNN Koopman compensation and EPC sections: No description of the training distribution of pothole geometries is given, which is necessary to assess generalization to unseen disturbances. The credibility verification is mentioned but lacks details on how it prevents the compensation from pushing the LMPC outside its feasible set.
minor comments (1)
- [Abstract] The abstract could briefly specify the operating conditions and disturbance types tested in the HiL experiments to strengthen the cross-condition claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below, indicating where revisions will be made and where we maintain our original approach based on the empirical focus of the work.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline claim of more than 11.5% improvement depends on the DK compensator producing corrections that the LMPC can absorb without violating steering feasibility or vehicle stability when the EPC trigger fires. However, no quantitative bounds on the approximation error of the Koopman lift or explicit stability certificate for the switched system are provided.
Authors: The 11.5% improvement is an empirical result obtained from hardware-in-the-loop experiments across multiple operating conditions on coupled slope and potholed roads. The EPC mechanism, with its activation criteria and credibility verification, is intended to ensure that DK corrections remain compatible with LMPC feasibility and vehicle stability, as validated in the HiL tests. We acknowledge that the manuscript does not derive quantitative bounds on the Koopman approximation error or provide an explicit stability certificate for the switched system. Such theoretical analysis lies outside the practical and implementation-focused scope of the current work. revision: no
-
Referee: [DNN Koopman and EPC mechanism] DNN Koopman compensation and EPC sections: No description of the training distribution of pothole geometries is given, which is necessary to assess generalization to unseen disturbances. The credibility verification is mentioned but lacks details on how it prevents the compensation from pushing the LMPC outside its feasible set.
Authors: We will revise the DNN Koopman and EPC sections to include a description of the pothole geometries and road disturbance scenarios used in training the DNN Koopman model. We will also expand the explanation of the credibility verification process, detailing the specific checks and thresholds employed to ensure that activated compensations do not drive the LMPC outside its feasible set. revision: yes
- Quantitative bounds on the approximation error of the Koopman lift or explicit stability certificate for the switched system
Circularity Check
No circularity: methods and validation remain independent of fitted inputs
full rationale
The abstract and description outline a sequence of distinct steps—adaptive RLS stiffness estimation, Laguerre MPC, DNN-Koopman deviation compensation, and EPC mechanism—followed by HiL experimental validation reporting >11.5% improvement. No equations, self-citations, or training details are supplied that would allow any claimed prediction or result to reduce by construction to its own inputs. The performance metric is presented as an external experimental outcome rather than a fitted or renamed quantity. Without explicit reduction (e.g., Eq. X = fitted parameter), the derivation chain is self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
M.Zhang,Q.Qi,X.Yang,R.Tang,P.Shi,Safetrajectorytrackingforheterogeneousmultiunmannedgroundvehiclesystemsviadecentralized cbf-clf method, IEEE Transactions on Industrial Electronics (2025) 1–11
2025
-
[2]
X.Zhang,B.Ram,N.Vullaganti,W.Aderholdt,P.Overby,X.Sun,Soilmoistureclassificationusinghyperspectralimaginganddeeplearning models on ground robot vehicles, Smart Agricultural Technology 12 (2025) 101413
2025
-
[3]
X. An, Z. Su, Y. Jia, M. Zhang, W. Jiang, J. Liu, Z. Rong, Real-time following algorithm for the unmanned ground vehicle using visual and spatial features, Measurement 259 (2026) 119743
2026
-
[4]
X. Tan, G. Wang, G. Wu, Z. Yao, Y. Wang, Q. Huang, Research on autonomous path planning and tracking control methods for unmanned electric shovels, Computer-Aided Civil and Infrastructure Engineering 40 (17) (2025) 2522–2545
2025
-
[5]
L. Wu, R. Xiao, H. Pu, G. Wang, M. Zhou, J. Luo, A camera-light detection and ranging sensor online extrinsic calibration network based on mamba-like linear attention mechanism for unstructured off-road environments, Engineering Applications of Artificial Intelligence 163 (2026) 113010
2026
-
[6]
X. Wang, D. Lu, H. Wu, A novel off-road tire model: brush-soil mechanics fusion, International Journal of Mechanical Sciences 310 (2026) 111128
2026
-
[7]
Xiong, B
Z. Xiong, B. Li, L. Wang, Z. Li, E. Yao, Human-like decision making: A human–machine shared steering control system with adaptive authority allocation, IEEE Transactions on Intelligent Transportation Systems 27 (2) (2026) 2268–2280. Page 21 of 22
2026
-
[8]
F. Xu, J. Feng, Y. Wang, X. Wang, C. Shen, C. Zhou, Parallel self-learning adaptive strategy based on model predictive control for trajectory tracking of autonomous vehicles, Engineering Applications of Artificial Intelligence 173 (2026) 114495
2026
-
[9]
J. Peng, X. Liu, C. Wu, D. Pi, J. Zhou, Deep reinforcement learning-tuning hierarchical vehicle trajectory tracking framework based on improved kinematic model predictive control, Engineering Applications of Artificial Intelligence 162 (2025) 112551
2025
-
[10]
Zhang, D
D. Zhang, D. Huo, M. Zhou, Z. Cao, Mpc-ds: A safe path tracking method for agvs in dynamic environments with dense obstacles, IEEE Transactions on Intelligent Transportation Systems 26 (10) (2025) 16963–16972
2025
-
[11]
J. Zhao, R. Li, X. Zheng, W. Li, C. Hu, Z. Liang, P. K. Wong, Constrained fractional-order model predictive control for robust path following of fwid-agvs with asymptotic prescribed performance, IEEE Transactions on Vehicular Technology 74 (2) (2025) 2692–2705
2025
-
[12]
X. Chen, C. Yang, J. Cheng, H. Hu, G. Shao, Y. Gao, Q. Zhu, A novel iterative learning-model predictive control algorithm for accurate path tracking of articulated steering vehicles, IEEE Robotics and Automation Letters 9 (8) (2024) 7373–7380
2024
-
[13]
W. Liu, M. Gong, H. Chen, D. Zhao, Prescribed performance control and experimental verification of multi-axle vehicle active suspension considering road slope and bionic principle, IEEE Transactions on Industrial Electronics (2025) 1–12
2025
-
[14]
C. Yang, Q. Wang, W. Wang, Y. Gao, Y. Zhang, R. Zhang, A fault estimation and fault-tolerant operation scheme design under simultaneous actuator and sensor faults for steer-by-wire system, Vehicle System Dynamics 0 (0) (2025) 1–28
2025
-
[15]
C.Ning,B.Wang,J.Leng,Z.Chen,D.Wen,C.Sun,Ut-mpc:Manifold-basedmodelpredictivecontrolwithdynamicweightingandfeedback for vehicle trajectory tracking on uneven terrain, IEEE Internet of Things Journal 12 (12) (2025) 19833–19845
2025
-
[16]
G. Cai, G. Yin, Y. Liu, J. Feng, J. Liang, F. Wang, H. Liu, Stochastic cooperative adaptive cruise control with sensor data distortion and communication delay, IEEE Transactions on Intelligent Transportation Systems 26 (7) (2025) 9500–9515
2025
-
[17]
S. Liu, L. Zhang, Y. Liu, J. Wang, C. Yang, J. Zhang, Motion posture control of corner module architecture intelligent electric vehicle on deep-potholed roads, IEEE/ASME Transactions on Mechatronics 29 (6) (2024) 4480–4491
2024
-
[18]
S. Liu, L. Zhang, J. Zhang, J. Wang, C. Ren, Cooperative control of path tracking and driving stability for intelligent vehicles on potholed road, IEEE Transactions on Intelligent Vehicles 9 (1) (2024) 2499–2508
2024
-
[19]
Y.Zhou,J.She,H.Shimizu,S.Guo,F.Wang,Y.He,S.Kawata,M.Iwasaki,Two-degree-of-freedomspatialrobustpreviewrepetitivecontrol for rotational systems, IEEE Transactions on Industrial Electronics 72 (2025) 10338–10348
2025
-
[20]
J. Bai, Z. Meng, Finite-time fuzzy control based on markov jump nonlinear system for tether towed vehicle under sudden disturbance, Aerospace Science and Technology 166 (2025) 110597
2025
-
[21]
T. Yang, K. Chai, J. Ji, Y. Wu, C. Xu, F. Gao, Ground-effect-aware modeling and control for multicopters, IEEE/ASME Transactions on Mechatronics 30 (6) (2025) 7406–7417
2025
-
[22]
H.Yong,S.Lu,W.Xie,T.Cui,F.Yang,Autonomousvehiclepathtracking:Stochastictubemodelpredictivecontrolwithcovariancesteering and discounted chance constraints, IEEE Transactions on Vehicular Technology 74 (5) (2025) 7124–7134
2025
-
[23]
S. Lee, S. Hwang, H. S. Kim, T–s fuzzy observer-based output feedback lateral control of ugvs using a disturbance observer, Drones 8 (11) (2024)
2024
-
[24]
J. Li, Q. Yi, P. Zhu, J. Hu, S. Yi, Data-driven co-optimization method of eco-adaptive cruise control for plug-in hybrid electric vehicles considering risky driving behaviors, Applied Energy 392 (2025) 126039
2025
-
[25]
J.Bian,C.Mu,H.Xia,C.Si,Fuzzyreinforcementlearning-basedsafecooperativecontrolfornonlinearmultiagentsystems,IEEETransactions on Systems, Man, and Cybernetics: Systems (2026) 1–13
2026
-
[26]
S. Shi, Z. Ma, X. Liu, B. Zhang, Z. Ren, Q. Cheng, N. Lin, An analysis method for robust stability region of vehicle handling based on linearisation at transient state points, Vehicle System Dynamics 0 (0) (2025) 1–23
2025
-
[27]
K. Xu, B. Meng, Z. Wang, X. Huang, Data-driven iterative learning control for nonlinear discrete-time systems based on full-form dynamic linearization, IEEE Transactions on Automation Science and Engineering 23 (2026) 470–483
2026
-
[28]
Q. Zhao, G. Tao, Koopman system approximation-based optimal control of multiple mobile robots, IEEE Transactions on Control Systems Technology 33 (3) (2025) 963–979
2025
-
[29]
Y. Deng, Y. Wang, H. Wang, P. Li, C. Hu, Z. Zuo, Integrated planning and control in unknown environment: A corridor-based terminal-free model predictive control strategy, IEEE Transactions on Industrial Electronics (2025) 1–12
2025
-
[30]
H. Lyu, Y. Guo, P. Liu, T. Wang, Uncertainty-aware dynamics modeling and data-driven robust predictive control for mixed vehicle platoon, IEEE Internet of Things Journal 12 (11) (2025) 17948–17963
2025
-
[31]
Y. Wang, S. Zhang, G. Li, Adaptive neural network control using prescribed performance and event-triggered for path tracking control of autonomous vehicle, Engineering Applications of Artificial Intelligence 164 (2026) 113080
2026
-
[32]
Y. Meng, L. Li, X. Wang, W.-W. Huang, E. Q. Wu, L. Zhu, Online koopman operator-based feedforward compensation strategy for fast tool servos with robust high-bandwidth control, IEEE Transactions on Industrial Electronics 72 (3) (2025) 2958–2967
2025
-
[33]
Z.Wang,S.Pan,K.Yu,W.Gao,Z.Chen,Data-drivenmodelingwithdeepkoopmanoperatorforrobustpathtrackingofautonomousvehicles, IEEE Transactions on Industrial Electronics (2026) 1–13
2026
-
[34]
X. Wu, C. Wei, H. Zhang, C. Jiang, C. Hu, Path-tracking and lateral stabilization for automated vehicles via learning-based robust model predictive control, IEEE Transactions on Vehicular Technology 73 (12) (2024) 18571–18583
2024
-
[35]
Page 22 of 22
Y.Zhang,W.Wang,C.Yang,T.Qie,R.Sun,Vehicledynamicsanalysisandadaptivecontrolschemedesignundercoupledslopefortrajectory tracking of four-wheel independent drive autonomous vehicles, Vehicle System Dynamics 63 (10) (2025) 1831–1860. Page 22 of 22
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.