Active Sensing-assisted UAV Communications with Jittering: Framework and Performance Analysis
Pith reviewed 2026-06-27 05:54 UTC · model grok-4.3
The pith
Two-stage active sensing allows UAV communication rates to approach the jitter-free upper bound at high transmit power.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
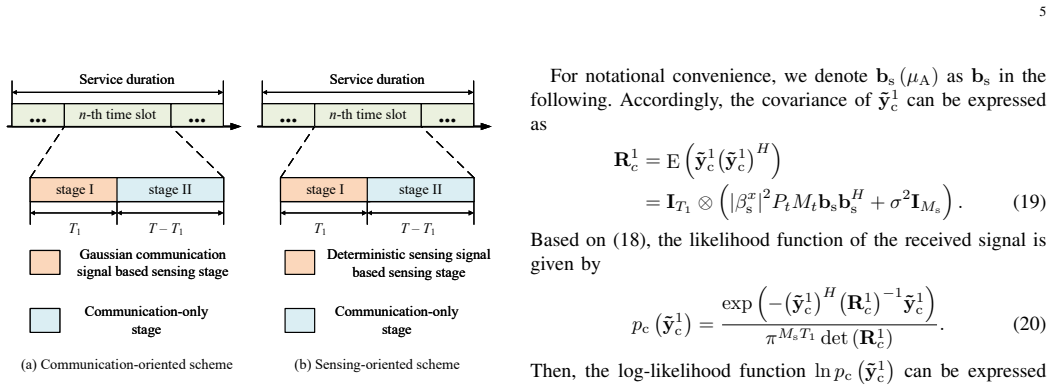
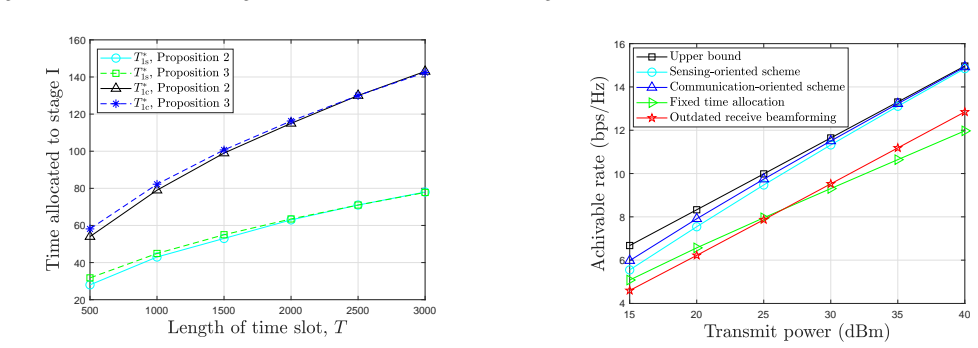
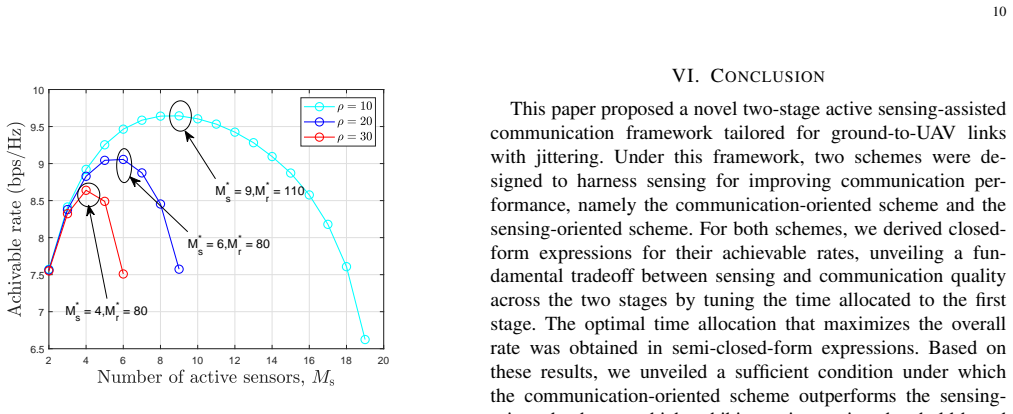
By employing maximum likelihood estimation of the angle of arrival in the first stage and then using that estimate for beamforming in the second stage, the achievable rate of the ground-to-UAV link can be expressed in closed form. The optimal fraction of time for the sensing stage that maximizes the average rate is obtained in semi-closed form. A sufficient condition with threshold structure determines when using information-bearing signals for sensing throughout outperforms dedicating the first stage to deterministic sensing signals. As transmit power grows large, the rate gap to the jitter-free case vanishes for both schemes.
What carries the argument
The two-stage framework with communication-oriented and sensing-oriented schemes that trade sensing accuracy against communication time via time allocation.
If this is right
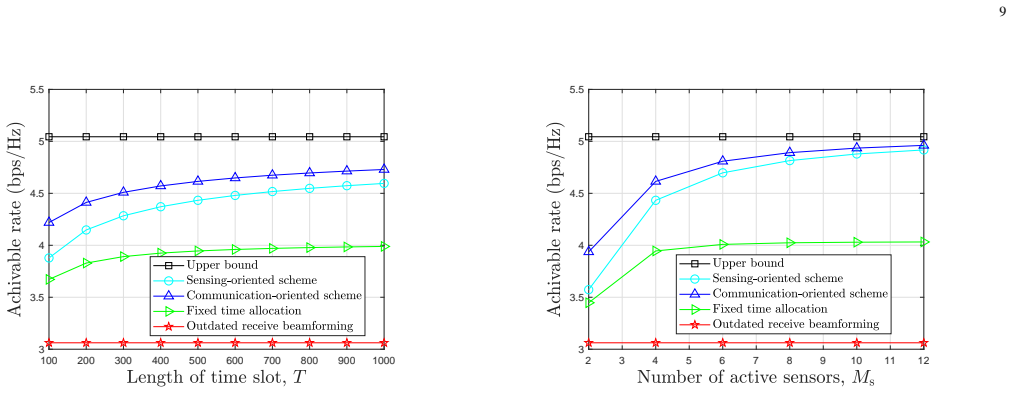
- The performance loss of both schemes relative to the jitter-free upper bound approaches zero as transmit power increases.
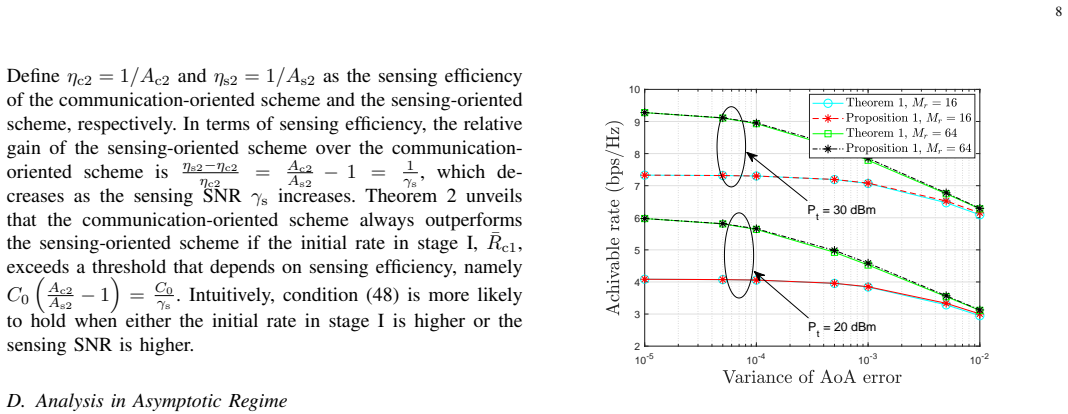
- A threshold-based condition determines when the communication-oriented scheme outperforms the sensing-oriented scheme.
- The optimal time allocation between stages that maximizes the overall rate is available in semi-closed form.
- Closed-form expressions for achievable rates and Cramér-Rao bounds are derived for both schemes.
Where Pith is reading between the lines
- The threshold condition suggests a simple switching rule implementable in hardware without solving optimization problems each time.
- Real-world UAV tests could check how well the single AoA parameter model holds when wind introduces additional jitter sources.
- The framework points toward integrated sensing and communication designs where the same signals serve both purposes without dedicated sensing slots.
Load-bearing premise
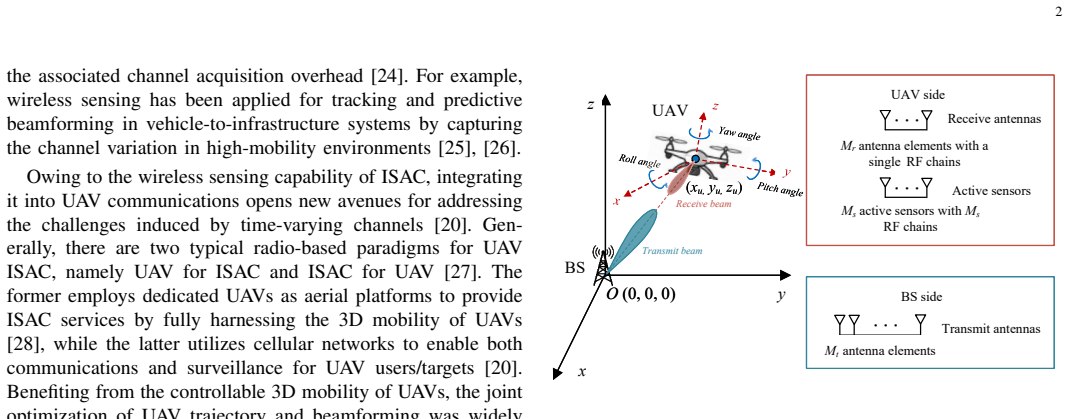
The jitter-induced beam misalignment is fully captured by a single angle-of-arrival parameter whose statistics are known in advance.
What would settle it
Measure the achievable rate at increasing transmit powers and check whether the gap to the jitter-free rate goes to zero; if it plateaus at a positive value, the asymptotic claim is false.
Figures
read the original abstract
Providing reliable communication for unmanned aerial vehicles (UAVs) via existing cellular networks is crucial for enabling the rapid growth of the low-altitude economy. However, UAV jittering significantly degrades communication quality due to induced beam misalignment. Inspired by recent advances in integrated sensing and communication, we propose a novel two-stage active sensing-assisted communication framework tailored for ground-to-UAV links with jittering. Specifically, two schemes are conceived to leverage sensing for enhancing communication performance, namely the communication-oriented scheme and the sensing-oriented scheme. For the sensing-oriented scheme, deterministic signals are employed in the first stage to facilitate angle-of-arrival (AoA) acquisition at the UAV side, followed by pure communication service in the second stage by using the estimated AoA. In contrast, the communication-oriented scheme employs Gaussian information-bearing signals throughout both stages, with AoA estimation relying on Gaussian random signals. For both schemes, we provide maximum likelihood estimators for AoA, along with analytical results characterizing the Cram\'er-Rao bound. To capture the performance limit, closed-form expressions for the achievable rates of the two schemes are derived, unveiling a fundamental tradeoff between sensing and communication quality across the two stages by tuning the time allocated to the first stage. The optimal time allocation that maximizes the overall rate is obtained in semi-closed-form. Based on these results, we unveil a sufficient condition under which the communication-oriented scheme outperforms the sensing-oriented scheme, which admits an interesting threshold-based structure. Asymptotic analysis demonstrates that the performance loss of the proposed schemes relative to the jitter-free upper bound approaches zero in the high transmit power regime.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a two-stage active sensing-assisted framework for ground-to-UAV communications under jittering, introducing a communication-oriented scheme (using Gaussian signals throughout) and a sensing-oriented scheme (deterministic signals for AoA estimation followed by communication). It derives ML AoA estimators and associated Cramér-Rao bounds for both, closed-form achievable rate expressions that trade off sensing and communication time, the semi-closed-form optimal time allocation maximizing the overall rate, a sufficient condition (with threshold structure) for when the communication-oriented scheme outperforms the sensing-oriented one, and an asymptotic result that the performance loss relative to the jitter-free upper bound vanishes as transmit power grows large.
Significance. If the closed-form rate expressions and asymptotic limits are rigorously justified without unaccounted residuals, the work supplies concrete analytic tools for balancing sensing and communication in jitter-affected UAV links, including a practical threshold rule for scheme selection. The explicit ML estimators, CRBs, and high-SNR vanishing-loss result are strengths that could inform ISAC designs in cellular networks.
major comments (2)
- [Section on achievable rate derivation (likely IV)] The transition from the ML AoA estimator (and its CRB) to the closed-form achievable rate expressions assumes that estimation error leaves no residual phase/amplitude misalignment in the second-stage communication rate; this is load-bearing for both the rate formulas and the high-power asymptotic claim that loss to the jitter-free bound approaches zero. The received-signal model must be shown to admit exact closed-form rates post-estimation without additional error terms.
- [Asymptotic analysis and sufficient condition sections (likely V)] The sufficient condition for communication-oriented scheme superiority (with its threshold-based structure) and the asymptotic analysis both rest on the single random AoA parameter fully capturing jitter misalignment with known statistics; if the underlying channel model admits time-varying AoA within a stage or unmodeled amplitude fluctuations, both the CRB-based performance characterization and the high-SNR limit would deviate from the stated jitter-free upper bound.
minor comments (2)
- [Section II] Notation for the two schemes and time-allocation parameter τ could be introduced more explicitly in the system model to improve readability before the rate derivations.
- [Throughout] A few instances of inconsistent capitalization in section headings and equation references appear; these are minor but should be standardized.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below with clarifications on the model and derivations.
read point-by-point responses
-
Referee: [Section on achievable rate derivation (likely IV)] The transition from the ML AoA estimator (and its CRB) to the closed-form achievable rate expressions assumes that estimation error leaves no residual phase/amplitude misalignment in the second-stage communication rate; this is load-bearing for both the rate formulas and the high-power asymptotic claim that loss to the jitter-free bound approaches zero. The received-signal model must be shown to admit exact closed-form rates post-estimation without additional error terms.
Authors: The closed-form rates explicitly incorporate misalignment: after obtaining the ML estimate in stage 1, the stage-2 beamformer uses the estimate, so the effective gain is a deterministic function of (true AoA - estimate). The achievable rate is the expectation of log(1 + SNR * |effective gain|^2) over the joint distribution of true AoA and estimate; this expectation evaluates in closed form under the array response and Gaussian noise model. The CRB enters only to characterize estimator variance for the sufficient condition, not to approximate the rate itself. The high-SNR limit follows because CRB ~ 1/P, so misalignment variance vanishes and the rate converges to the jitter-free bound. A clarifying remark will be added to Section IV. revision: partial
-
Referee: [Asymptotic analysis and sufficient condition sections (likely V)] The sufficient condition for communication-oriented scheme superiority (with its threshold-based structure) and the asymptotic analysis both rest on the single random AoA parameter fully capturing jitter misalignment with known statistics; if the underlying channel model admits time-varying AoA within a stage or unmodeled amplitude fluctuations, both the CRB-based performance characterization and the high-SNR limit would deviate from the stated jitter-free upper bound.
Authors: Section II explicitly models jitter via a single random AoA drawn from a known distribution that is constant over the two-stage frame (block model). Under this model the single parameter fully captures misalignment, the CRB is tight, the rate expressions and threshold condition are exact, and the high-SNR convergence holds. Time-varying AoA or amplitude fluctuations would require a different channel model outside the paper's scope. revision: no
Circularity Check
No circularity; derivations are independent analytic results from standard signal models
full rationale
The paper's central results consist of ML AoA estimators, CRB expressions, closed-form achievable rates, optimal time allocation, a threshold-structured sufficient condition for scheme comparison, and high-SNR asymptotic limits, all obtained by direct manipulation of the assumed received-signal model (single random AoA with known statistics, Gaussian or deterministic pilots). No equation reduces by construction to a fitted input, self-cited premise, or renamed known result; the jitter-free upper bound is an external reference point, not an internal tautology. Any self-citations are peripheral and non-load-bearing.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Received signal follows a standard far-field array response model with additive white Gaussian noise whose variance is known.
- domain assumption Jitter statistics (distribution of angle deviation) are known a priori and stationary across the two stages.
Reference graph
Works this paper leans on
-
[1]
6G non-terrestrial networks enabled low-altitude economy: Op- portunities and challenges,
Y . Jiang, X. Li, G. Zhu, H. Li, J. Deng, K. Han, C. Shen, Q. Shi, and R. Zhang, “6G non-terrestrial networks enabled low-altitude economy: Opportunities and challenges,”arXiv preprint arXiv:2311.09047, 2023
-
[2]
A survey on detection, classification, and tracking of UA Vs using radar and communications systems,
W. Khawaja, M. Ezuma, V . Semkin, F. Erden, O. Ozdemir, and I. Guvenc, “A survey on detection, classification, and tracking of UA Vs using radar and communications systems,”IEEE Commun. Surveys Tuts., 2025
2025
-
[3]
Accessing from the sky: A tutorial on UA V communications for 5G and beyond,
Y . Zeng, Q. Wu, and R. Zhang, “Accessing from the sky: A tutorial on UA V communications for 5G and beyond,”Proc. IEEE, vol. 107, no. 12, pp. 2327–2375, Dec. 2019
2019
-
[4]
Joint analog beamforming and trajectory planning for energy-efficient uav-enabled nonlinear wireless power transfer,
X. Yuan, H. Jiang, Y . Hu, and A. Schmeink, “Joint analog beamforming and trajectory planning for energy-efficient uav-enabled nonlinear wireless power transfer,”IEEE J. Sel. Areas Commun., vol. 40, no. 10, pp. 2914– 2929, Oct. 2022
2022
-
[5]
Real-time wind speed estimation and compen- sation for improved flight,
B. Arain and F. Kendoul, “Real-time wind speed estimation and compen- sation for improved flight,”IEEE Trans. Aerosp. Electron. Syst., vol. 50, no. 2, pp. 1599–1606, Apr. 2014
2014
-
[6]
Impact of rotary-wing UA V wobbling on millimeter-wave air-to-ground wireless channel,
S. Yang, Z. Zhang, J. Zhang, and J. Zhang, “Impact of rotary-wing UA V wobbling on millimeter-wave air-to-ground wireless channel,”IEEE Trans. V eh. Technol., vol. 71, no. 9, pp. 9174–9185, Sep. 2022
2022
-
[7]
Secrecy performance analysis of air-to-ground communication with UA V jitter and multiple random walking eavesdroppers,
H. Wu, H. Li, Z. Wei, N. Zhang, and X. Tao, “Secrecy performance analysis of air-to-ground communication with UA V jitter and multiple random walking eavesdroppers,”IEEE Trans. V eh. Technol., vol. 70, no. 1, pp. 572–584, Jan. 2021
2021
-
[8]
Analytical channel models for millimeter wave UA V networks under hovering fluctuations,
M. T. Dabiri, H. Safi, S. Parsaeefard, and W. Saad, “Analytical channel models for millimeter wave UA V networks under hovering fluctuations,” IEEE Trans. Wireless Commun., vol. 19, no. 4, pp. 2868–2883, Apr. 2020
2020
-
[9]
Jittering effects analysis and beam training design for UA V millimeter wave communications,
W. Wang and W. Zhang, “Jittering effects analysis and beam training design for UA V millimeter wave communications,”IEEE Trans. Wireless Commun., vol. 21, no. 5, pp. 3131–3146, May 2022
2022
-
[10]
Deployment and robust hybrid beamforming for UA V mmWave communications,
K. Liu, Y . Liu, P. Yi, Z. Xiao, and X.-G. Xia, “Deployment and robust hybrid beamforming for UA V mmWave communications,”IEEE Trans. Commun., vol. 71, no. 5, pp. 3073–3086, May 2023
2023
-
[11]
Robust beamforming for UA V communication with jittering effects,
K. Lee, D. You, H. Noh, and C. Lee, “Robust beamforming for UA V communication with jittering effects,”IEEE Wireless Commun. Lett., vol. 14, no. 1, pp. 48–52, Jan. 2025
2025
-
[12]
Sensing aided beam tracking for UA V with jittering effect,
Y . Tang, W. Liu, J. Zhu, and C. Li, “Sensing aided beam tracking for UA V with jittering effect,”IEEE Wireless Commun. Lett., vol. 13, no. 8, pp. 2150–2154, Aug. 2024
2024
-
[13]
Deployment for high altitude platform systems with perturbation: Distributionally robust optimization approach,
Y . Liu, H. Zhang, B. Di, J. Wu, and Z. Han, “Deployment for high altitude platform systems with perturbation: Distributionally robust optimization approach,”IEEE Wireless Commun. Lett., vol. 26, no. 5, pp. 1126–1130, May 2022
2022
-
[14]
Robust beamforming for uplink RSMA in UA V communication systems with jittering,
J. Ouyang, Y . Lu, C. Liu, B. Ma, and M. Lin, “Robust beamforming for uplink RSMA in UA V communication systems with jittering,”IEEE Commun. Lett., vol. 29, no. 4, pp. 769–773, Apr. 2025
2025
-
[15]
Adaptive hybrid beamforming for UA V mmWave communications against asymmetric jitter,
W. Chen, C. Liu, W. Wang, M. Peng, and W. Zhang, “Adaptive hybrid beamforming for UA V mmWave communications against asymmetric jitter,”IEEE Trans. Wireless Commun., vol. 23, no. 8, pp. 9432–9445, Aug. 2024
2024
-
[16]
Static IRS meets distributed MIMO: A new architecture for dynamic beamforming,
G. Chen, Q. Wu, C. Wu, M. Jian, Y . Chen, and W. Chen, “Static IRS meets distributed MIMO: A new architecture for dynamic beamforming,” IEEE Wireless Commun. Lett., vol. 12, no. 11, pp. 1866–1870, Nov. 2023
2023
-
[17]
Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond,
F. Liu, Y . Cui, C. Masouros, J. Xu, T. X. Han, Y . C. Eldar, and S. Buzzi, “Integrated sensing and communications: Toward dual-functional wireless networks for 6G and beyond,”IEEE J. Sel. Areas Commun., vol. 40, no. 6, pp. 1728–1767, Jun. 2022
2022
-
[18]
Integrated sensing and communications over the years: An evolution perspective,
D. Zhang, Y . Cui, X. Cao, N. Su, Y . Gong, F. Liu, W. Yuan, X. Jing, J. A. Zhang, J. Xuet al., “Integrated sensing and communications over the years: An evolution perspective,”IEEE Commun. Surveys Tuts, vol. 28, no. 3, pp. 5014–5048, Mar. 2026
2026
-
[19]
Intelligent reflecting surfaces for integrated sensing and communications: From system coexistence to networked mutualism,
Q. Wuet al., “Intelligent reflecting surfaces for integrated sensing and communications: From system coexistence to networked mutualism,” IEEE Commun. Surveys Tuts, vol. 28, no. 3, pp. 6057–6100, Apr. 2026
2026
-
[20]
An overview of cellular ISAC for low-altitude UA V: New opportunities and challenges,
Y . Songet al., “An overview of cellular ISAC for low-altitude UA V: New opportunities and challenges,”IEEE Commun. Mag., vol. 63, no. 12, pp. 88–95, 2025
2025
-
[21]
Network-level integrated sensing and communication: Interference management and BS coordina- tion using stochastic geometry,
K. Meng, C. Masouros, G. Chen, and F. Liu, “Network-level integrated sensing and communication: Interference management and BS coordina- tion using stochastic geometry,”IEEE Trans. Wireless Commun., vol. 23, no. 12, pp. 19 365–19 381, Dec. 2024
2024
-
[22]
Multi-IRS-aided ISAC system: Multi-path exploitation versus reduction,
G. Chen, Q. Wu, S. Lu, M. Hua, and W. Chen, “Multi-IRS-aided ISAC system: Multi-path exploitation versus reduction,”IEEE Trans. Wireless Commun., vol. 25, pp. 13 351–13 368, 2026
2026
-
[23]
Fundamental CRB-rate tradeoff in multi-antenna ISAC systems with information multicasting and multi-target sensing,
Z. Ren, Y . Peng, X. Song, Y . Fang, L. Qiu, L. Liu, D. W. K. Ng, and J. Xu, “Fundamental CRB-rate tradeoff in multi-antenna ISAC systems with information multicasting and multi-target sensing,”IEEE Trans. Wireless Commun., vol. 23, no. 4, pp. 3870–3885, Apr. 2024
2024
-
[24]
Radar-assisted predictive beamforming for vehicular links: Communication served by sensing,
F. Liu, W. Yuan, C. Masouros, and J. Yuan, “Radar-assisted predictive beamforming for vehicular links: Communication served by sensing,” IEEE Trans. Wireless Commun., vol. 19, no. 11, pp. 7704–7719, Nov. 2020
2020
-
[25]
Sensing-assisted communication in vehicular networks with intelligent surface,
K. Meng, Q. Wu, W. Chen, and D. Li, “Sensing-assisted communication in vehicular networks with intelligent surface,”IEEE Trans. V eh. Technol., vol. 73, no. 1, pp. 876–893, Jan. 2024
2024
-
[26]
Bayesian predictive beamforming for vehicular networks: A low-overhead joint radar-communication approach,
W. Yuan, F. Liu, C. Masouros, J. Yuan, D. W. K. Ng, and N. Gonz ´alez- Prelcic, “Bayesian predictive beamforming for vehicular networks: A low-overhead joint radar-communication approach,”IEEE Trans. Wireless Commun., vol. 20, no. 3, pp. 1442–1456, Mar. 2020
2020
-
[27]
UA V meets integrated sensing and communication: Challenges and future directions,
J. Mu, R. Zhang, Y . Cui, N. Gao, and X. Jing, “UA V meets integrated sensing and communication: Challenges and future directions,”IEEE Commun. Mag., vol. 61, no. 5, pp. 62–67, May 2023
2023
-
[28]
UA V-enabled integrated sensing and communication: Opportunities and challenges,
K. Menget al., “UA V-enabled integrated sensing and communication: Opportunities and challenges,”IEEE Wireless Commun., vol. 31, no. 2, pp. 97–104, Feb. 2024
2024
-
[29]
Rotatable antenna meets UA V: Towards dual-level channel reconfiguration paradigm for ISAC,
S. Chen, G. Chen, L. Shi, Q. Wu, and K. Wei, “Rotatable antenna meets UA V: Towards dual-level channel reconfiguration paradigm for ISAC,” Early Access, 2025, doi: 10.1109/TVT.2026.3682292, 2026
-
[30]
ISAC from the sky: UA V trajectory design for joint communication and target localization,
X. Jing, F. Liu, C. Masouros, and Y . Zeng, “ISAC from the sky: UA V trajectory design for joint communication and target localization,”IEEE Trans. Wireless Commun., vol. 23, no. 10, pp. 12 857–12 872, Oct. 2024
2024
-
[31]
Joint maneuver and beamforming design for UA V-enabled integrated sensing and communication,
Z. Lyu, G. Zhu, and J. Xu, “Joint maneuver and beamforming design for UA V-enabled integrated sensing and communication,”IEEE Trans. Wireless Commun., vol. 22, no. 4, pp. 2424–2440, Apr. 2023
2023
-
[32]
Dynamic ISAC beamforming design for UA V-enabled vehicular networks,
X. Pang, S. Guo, J. Tang, N. Zhao, and N. Al-Dhahir, “Dynamic ISAC beamforming design for UA V-enabled vehicular networks,”IEEE Trans. Wireless Commun., vol. 23, no. 11, pp. 16 852–16 864, Nov. 2024
2024
-
[33]
Energy-aware UA V-enabled target tracking: Online optimization with location constraints,
Y . Jiang, Q. Wu, W. Chen, and H. Hui, “Energy-aware UA V-enabled target tracking: Online optimization with location constraints,”IEEE Trans. V eh. Technol., vol. 74, no. 4, pp. 6668–6673, Apr. 2025
2025
-
[34]
Networked ISAC for low-altitude economy: Coordinated transmit beamforming and UA V trajectory design,
G. Cheng, X. Song, Z. Lyu, and J. Xu, “Networked ISAC for low-altitude economy: Coordinated transmit beamforming and UA V trajectory design,” IEEE Trans. Commun., vol. 73, no. 8, pp. 5832–5847, Aug. 2025
2025
-
[35]
X. Song, X. Yu, J. Xu, and D. W. K. Ng, “Integrated sensing and communications for low-altitude economy with deterministic sensing and gaussian information signals,”arXiv preprint arXiv:2604.19040, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[36]
Deep learning-based predictive bidirectional beamforming in ISAC-enabled UA V networks,
J. Xu, X. Zhou, H. Zhang, and Y . Li, “Deep learning-based predictive bidirectional beamforming in ISAC-enabled UA V networks,”IEEE Trans. Wireless Commun., vol. 25, pp. 12 230–12 245, 2026
2026
-
[37]
Low-Altitude UAV Tracking via Sensing-Assisted Predictive Beamforming
Y . Jiang, Q. Wu, H. Hui, W. Chen, and D. W. K. Ng, “Low-Altitude UA V Tracking via Sensing-Assisted Predictive Beamforming,”arXiv preprint arXiv:2509.12698, 2025
work page internal anchor Pith review arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.