Recommendations on Designing Practical Interval Type-2 Fuzzy Systems
Pith reviewed 2026-05-25 10:48 UTC · model grok-4.3
The pith
Recommended defaults for fuzzifiers, membership functions, and inference methods make interval type-2 fuzzy systems easier to design from the start.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
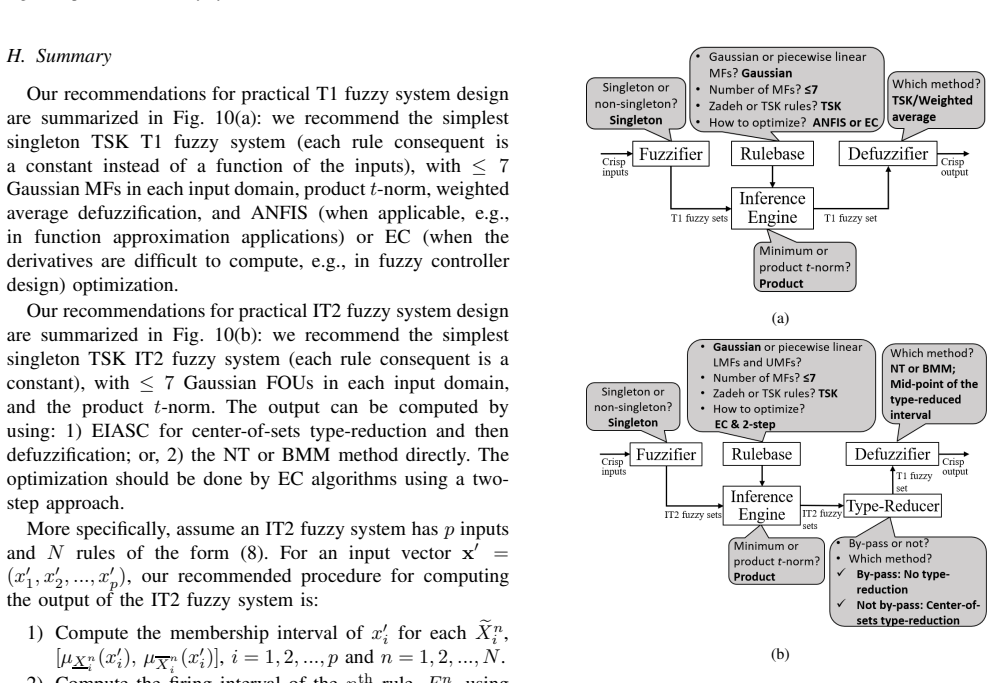
The authors recommend singleton fuzzifier, a moderate number of membership functions per input, Gaussian or piecewise linear membership functions, either Mamdani or TSK inference, product t-norm, use of type-reduction, and standard optimization methods as concrete starting points that lower the barrier for new interval type-2 fuzzy system designers.
What carries the argument
A list of default answers to the core design questions (singleton vs non-singleton fuzzifier, membership function count and shape, inference type, t-norm choice, type-reduction, and optimization) that together form an initial practical configuration.
If this is right
- Beginners gain a concrete path to build a working interval type-2 system without first mastering every design option.
- Initial prototypes become more reproducible across different research groups.
- Type-reduction and optimization steps can be applied directly on top of the defaults to refine performance.
- The overall entry cost for experimenting with interval type-2 systems drops, expanding the set of people who can test them.
Where Pith is reading between the lines
- These defaults could be encoded into design software so that users receive a ready-to-tune initial system rather than a blank slate.
- In applications with very high noise, a follow-up test comparing the defaults against non-singleton fuzzifiers would show when the starting choice needs adjustment.
- The same default list might serve as a baseline for comparing interval type-2 systems against other uncertainty-handling methods such as probabilistic or evidential approaches.
Load-bearing premise
That the suggested starting choices serve as broadly useful defaults across applications without requiring case-by-case validation or extensive prior domain knowledge.
What would settle it
A study in which the recommended defaults produce markedly inferior results compared with other initial choices across several unrelated applications, forcing designers to select different parameters before any optimization begins.
Figures
read the original abstract
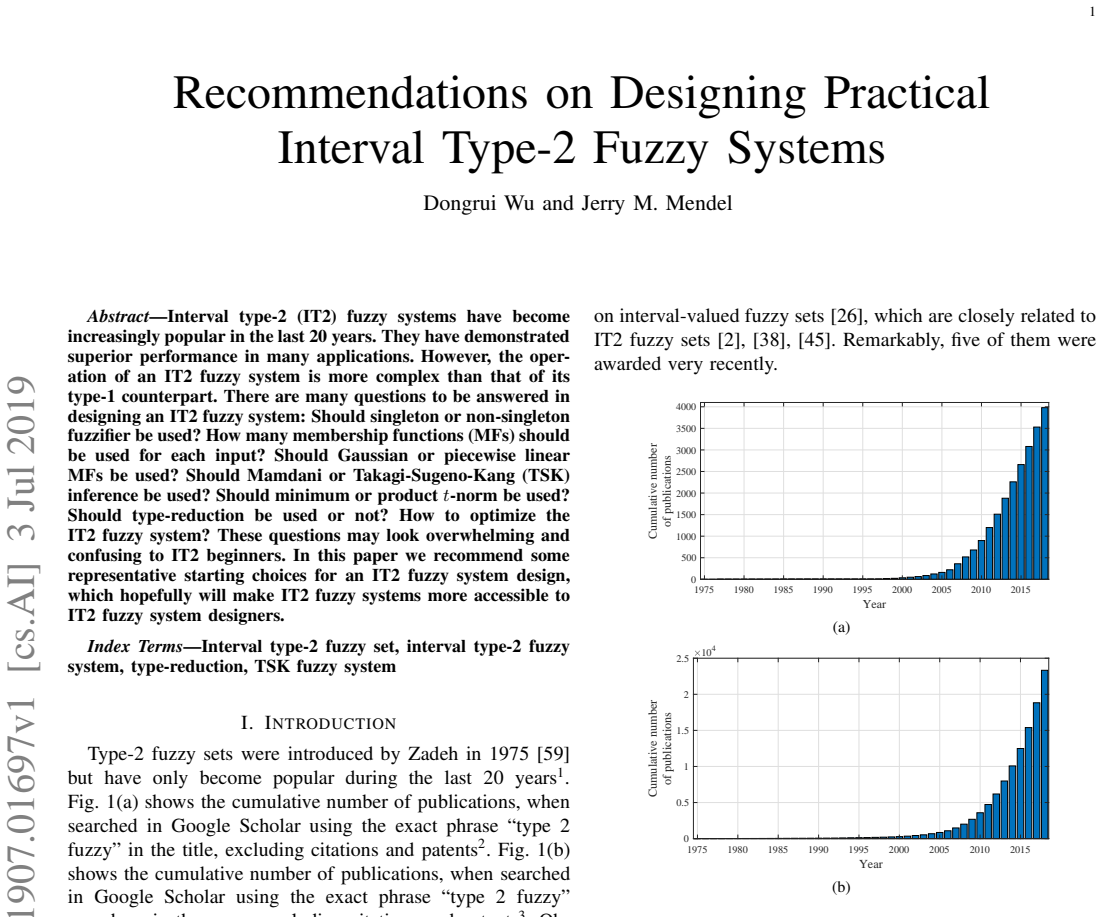
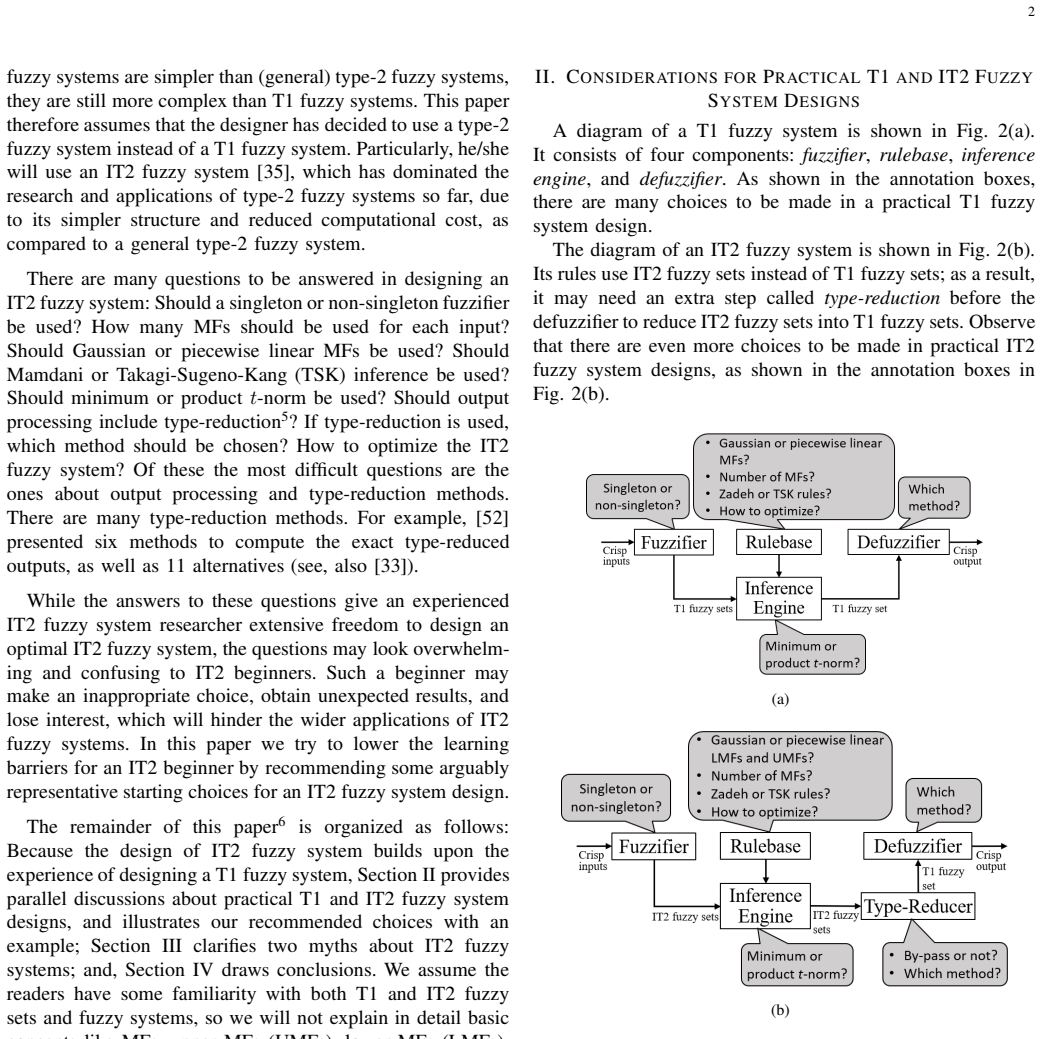
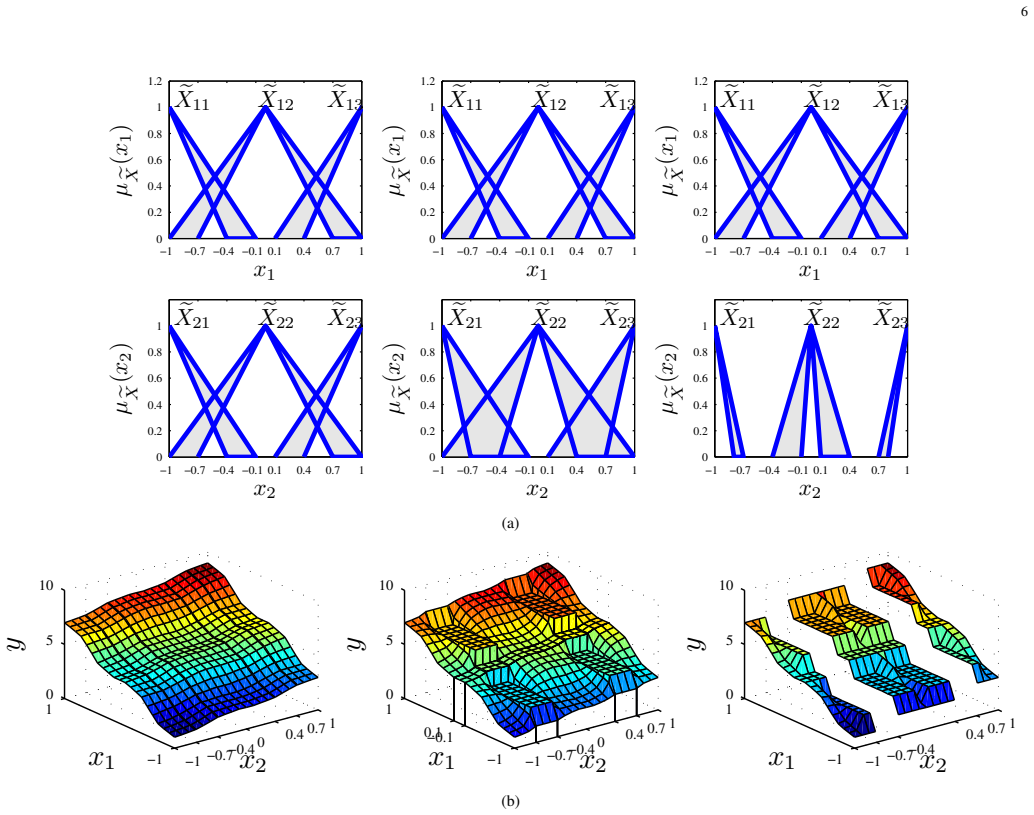
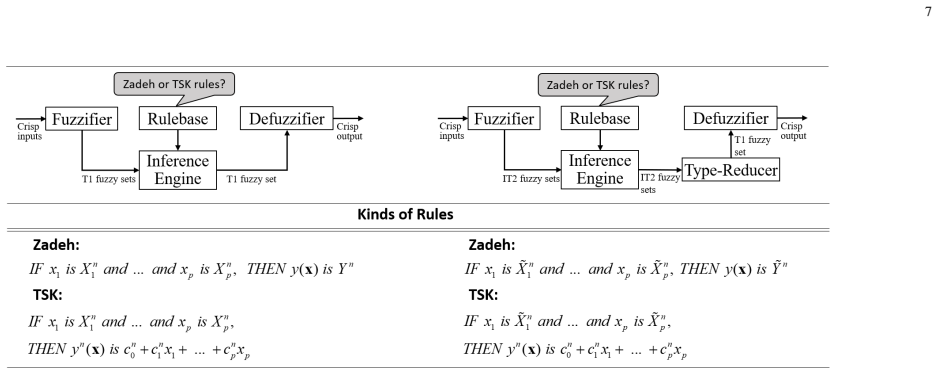
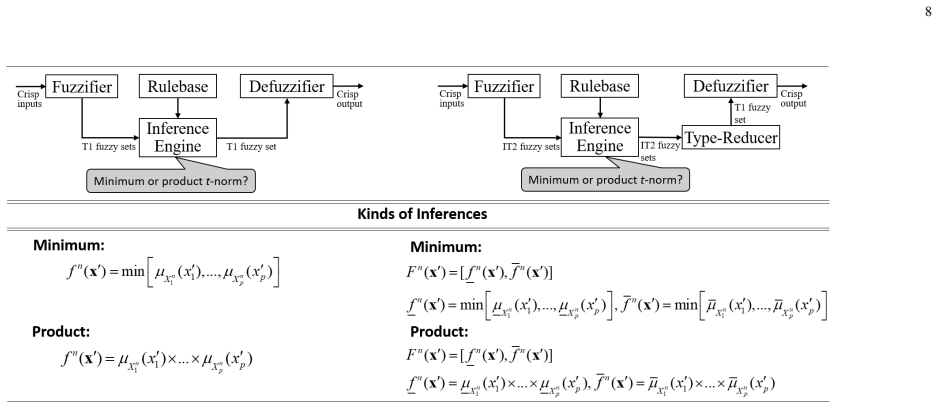
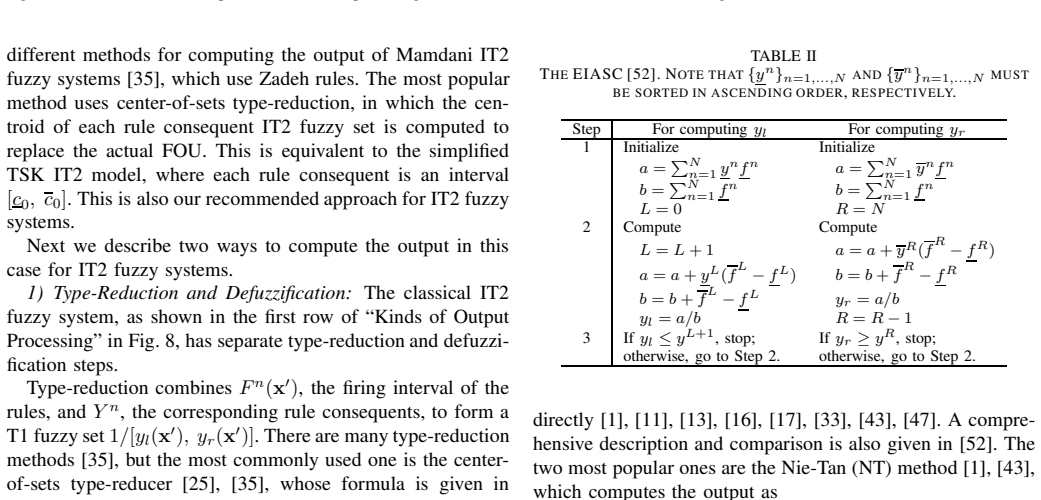
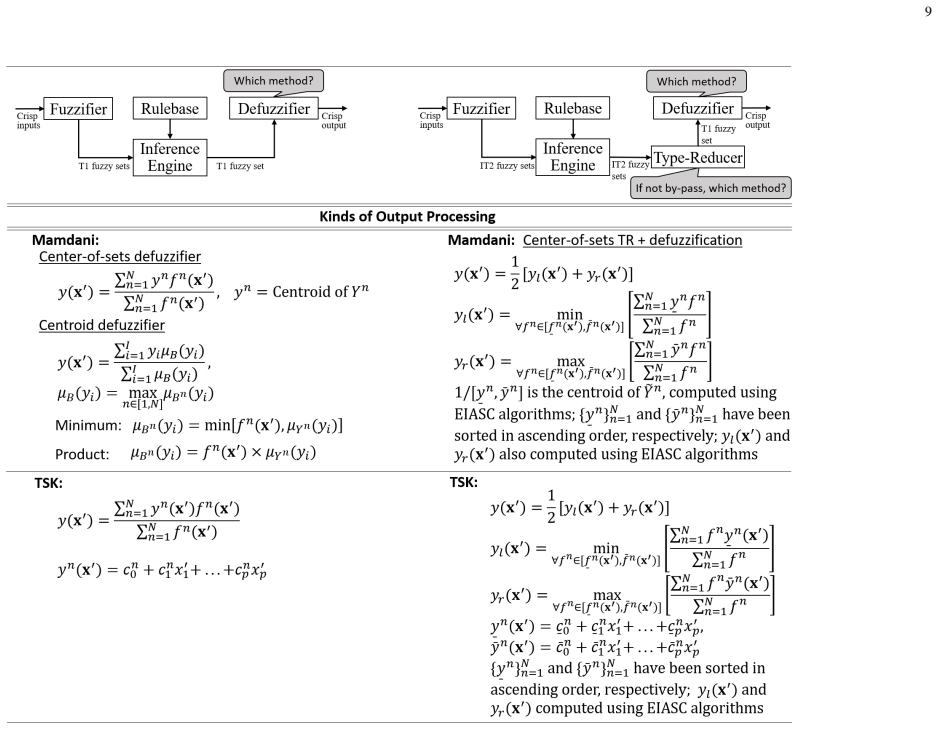
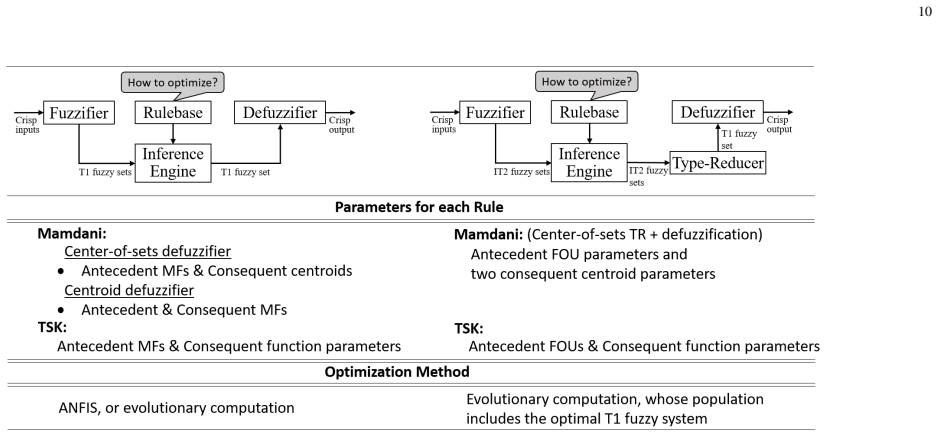
Interval type-2 (IT2) fuzzy systems have become increasingly popular in the last 20 years. They have demonstrated superior performance in many applications. However, the operation of an IT2 fuzzy system is more complex than that of its type-1 counterpart. There are many questions to be answered in designing an IT2 fuzzy system: Should singleton or non-singleton fuzzifier be used? How many membership functions (MFs) should be used for each input? Should Gaussian or piecewise linear MFs be used? Should Mamdani or Takagi-Sugeno-Kang (TSK) inference be used? Should minimum or product $t$-norm be used? Should type-reduction be used or not? How to optimize the IT2 fuzzy system? These questions may look overwhelming and confusing to IT2 beginners. In this paper we recommend some representative starting choices for an IT2 fuzzy system design, which hopefully will make IT2 fuzzy systems more accessible to IT2 fuzzy system designers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript offers experience-based recommendations for several key design decisions in interval type-2 (IT2) fuzzy systems—singleton vs. non-singleton fuzzifier, number of membership functions per input, Gaussian vs. piecewise-linear MFs, Mamdani vs. TSK inference, min vs. product t-norm, whether to use type-reduction, and optimization approach—with the goal of providing accessible starting points for beginners.
Significance. If the suggested defaults prove broadly serviceable, the paper could meaningfully reduce the initial design burden for new IT2 practitioners by replacing an open-ended list of questions with concrete, representative choices; the contribution is modest because the recommendations are framed as experience-derived heuristics rather than validated optima or parameter-free results.
minor comments (1)
- [Abstract] Abstract: the list of design questions is clear, but the abstract does not preview any of the actual recommended choices (e.g., singleton fuzzifier, moderate MF count); adding one sentence summarizing the main suggestions would give readers an immediate sense of the paper’s concrete output.
Simulated Author's Rebuttal
We thank the referee for reviewing our manuscript and for the recommendation of minor revision. The report provides a helpful summary of the paper's goals but does not list any specific major comments requiring detailed responses or changes.
Circularity Check
No significant circularity; advisory recommendations without derivations or self-referential reductions
full rationale
The paper presents practical starting choices for IT2 fuzzy system design (e.g., singleton fuzzifier, moderate MF counts) framed explicitly as guidance to lower barriers for beginners. No derivation chain, equations, parameter fitting, or theorems are claimed. Self-citations to prior IT2 work exist but are not load-bearing for any 'prediction' or uniqueness result; the central content is experiential advice, not a reduction to inputs by construction. This matches the default expectation of no circularity for non-derivational papers.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Interval type-2 fuzzy systems have demonstrated superior performance in many applications compared to type-1 counterparts.
Reference graph
Works this paper leans on
-
[1]
M. B. Begian, W. W. Melek, J. M. Mendel, Stability analysi s of type- 2 fuzzy systems, in: Proc. IEEE Int’l Conf. on Fuzzy Systems, Hong Kong, 2008
work page 2008
-
[2]
H. Bustince, E. Barrenechea, M. Pagola, J. Fernandez, Z. Xu, B. Bedre- gal, J. Montero, H. Hagras, F. Herrera, B. D. Baets, A histori cal account of types of fuzzy sets and their relationships, IEEE Trans. o n Fuzzy Systems 24 (1) (2016) 179–194
work page 2016
-
[3]
O. Castillo, P . Melin, Type-2 Fuzzy Logic Theory and Appl ications, Springer-V erlag, Berlin, 2008
work page 2008
-
[4]
L. Cervantes, O. Castillo, D. Hidalgo, R. Martinez-Soto , Fuzzy dynamic adaptation of gap generation and mutation in genetic optimi zation of type 2 fuzzy controllers, Advances in Operations Research 2 018
-
[5]
S. S. L. Chang, L. A. Zadeh, On fuzzy mapping and control, I EEE Trans. on Systems, Man, and Cybernetics SMC-2 (1) (1972) 30– 34
work page 1972
-
[6]
C. Chen, R. John, J. Twycross, J. M. Garibaldi, An extende d ANFIS architecture and its learning properties for type-1 and int erval type-2 models, in: IEEE Int’l Conf. on Fuzzy Systems, V ancouver, Ca nada, 2016
work page 2016
-
[7]
C. Chen, R. John, J. Twycross, J. M. Garibaldi, Type-1 and interval type-2 ANFIS: A comparison, in: IEEE Int’l Conf. on Fuzzy Sys tems, Naples, Italy, 2017
work page 2017
-
[8]
C. Chen, R. John, J. Twycross, J. M. Garibaldi, A direct ap proach for determining the switch points in the KarnikMendel algorith m, IEEE Trans. on Fuzzy Systems 26 (2) (2018) 1079–1085
work page 2018
-
[9]
C. Chen, D. Wu, J. M. Garibaldi, R. John, J. Twycross, J. M. Mendel, A comment on A direct approach for determining the switch poin ts in the KarnikMendel algorithm, IEEE Trans. on Fuzzy Systems 26 (6) (2018) 3905–3907
work page 2018
-
[10]
T. W. Chua, W. W. Tan, GA optimisation of non-singleton f uzzy logic system for ECG classification, in: Proc. IEEE Congress on Evo lutionary Computation, Singapore, 2007
work page 2007
-
[11]
S. Coupland, R. I. John, Geometric type-1 and type-2 fuz zy logic systems, IEEE Trans. on Fuzzy Systems 15 (1) (2007) 3–15
work page 2007
- [12]
-
[13]
X. Du, H. Ying, Derivation and analysis of the analytica l structures of the interval type-2 fuzzy-PI and PD controllers, IEEE Trans . on Fuzzy Systems 18 (4) (2010) 802–814
work page 2010
- [14]
-
[15]
C. I. Gonzalez, P . Melin, J. R. Castro, O. Castillo, O. Me ndoza, Optimization of interval type-2 fuzzy systems for image edg e detection, Applied Soft Computing 47 (2016) 631–643
work page 2016
-
[16]
M. Gorzalczany, Decision making in signal transmissio n problems with interval-valued fuzzy sets, Fuzzy Sets and Systems 23 (1987 ) 191–203
work page 1987
-
[17]
S. Greenfield, F. Chiclana, S. Coupland, R. John, The col lapsing method of defuzzification for discretised interval type-2 fuzzy se ts, Information Sciences 179 (13) (2008) 2055–2069
work page 2008
- [18]
-
[19]
H. Hagras, Type-2 FLCs: A new generation of fuzzy contro llers, IEEE Computational Intelligence Magazine 2 (1) (2007) 30–43. 14
work page 2007
- [20]
-
[21]
H. Hu, Y . Wang, Y . Cai, Advantages of the enhanced opposi te direction searching algorithm for computing the centroid of an interv al type-2 fuzzy set, Asian Journal of Control 14 (6) (2012) 1–9
work page 2012
-
[22]
H. Z. Hu, G. Zhao, H. N. Y ang, Fast algorithm to calculate generalized centroid of interval type-2 fuzzy set, Control Decis. 25 (4) (2010) 637– 640
work page 2010
- [23]
-
[24]
J. R. Jang, ANFIS: adaptive-network-based fuzzy infer ence system, IEEE Trans. on Systems, Man, and Cybernetics 23 (3) (1993) 66 5–685
work page 1993
-
[25]
N. N. Karnik, J. M. Mendel, Centroid of a type-2 fuzzy set , Information Sciences 132 (2001) 195–220
work page 2001
-
[26]
D. Li, TOPSIS-based nonlinear-programming methodolo gy for multi- attribute decision making with interval-valued intuition istic fuzzy sets, IEEE Trans. on Fuzzy Systems 18 (2) (2010) 299–311
work page 2010
- [27]
-
[28]
R. Martinez-Soto, O. Castillo, L. T. Aguilar, Type-1 an d type-2 fuzzy logic controller design using a hybrid PSO-GA optimization method, Information Sciences 285 (2014) 35–49
work page 2014
-
[29]
M. Melgarejo, A fast recursive method to compute the gen eralized centroid of an interval type-2 fuzzy set, in: Proc. NAFIPS, S an Diego, CA, 2007
work page 2007
-
[30]
J. M. Mendel, Uncertain Rule-Based Fuzzy Logic Systems : Introduction and New Directions, Prentice-Hall, Upper Saddle River, NJ, 2001
work page 2001
-
[31]
J. M. Mendel, Computing with words: Zadeh, Turing, Popp er and Occam, IEEE Computational Intelligence Magazine 2 (2007) 1 0–17
work page 2007
-
[32]
J. M. Mendel, Type-2 fuzzy sets and systems: An overview , IEEE Computational Intelligence Magazine 2 (1) (2007) 20–29
work page 2007
-
[33]
J. M. Mendel, On KM algorithms for solving type-2 fuzzy s et problems, IEEE Trans. on Fuzzy Systems 21 (3) (2013) 426–446
work page 2013
-
[34]
J. M. Mendel, General type-2 fuzzy logic systems made si mple: a tutorial, IEEE Trans. on Fuzzy Systems 22 (5) (2014) 1162–11 82
work page 2014
-
[35]
J. M. Mendel, Uncertain rule-based fuzzy systems: intr oduction and new directions, 2nd ed., Springer, 2017
work page 2017
-
[36]
J. M. Mendel, Explaining the performance potential of r ule-based fuzzy systems as a greater sculpting of the state space, IEEE Trans . on Fuzzy Systems 26 (4) (2018) 2362–2373
work page 2018
-
[37]
J. M. Mendel, Type-2 fuzzy sets as well as computing with words, IEEE Computational Intelligence Magazine 14 (1) (2019) 82–95
work page 2019
-
[38]
J. M. Mendel, H. Hagras, H. Bustince, F. Herrera, Commen ts on ‘Interval type-2 fuzzy sets are generalization of interval -valued fuzzy sets: Towards a wide view on their relationship’, IEEE Trans . on Fuzzy Systems 24 (1) (2016) 249–250
work page 2016
-
[39]
J. M. Mendel, D. Wu, Perceptual Computing: Aiding Peopl e in Making Subjective Judgments, Wiley-IEEE Press, Hoboken, NJ, 2010
work page 2010
-
[40]
G. Miller, The magical number seven plus or minus two: so me limits on the capacity for processing information, Psychological Review 63 (2) (1956) 81–97
work page 1956
-
[41]
J. G. Monicka, N. Sekhar, K. R. Kumar, Performance evalu ation of membership functions on fuzzy logic controlled AC voltage c ontroller for speed control of induction motor drive, International J ournal of Computer Applications 13 (5)
-
[42]
M. Nie, W. Tan, Analytical structure and characteristi cs of symmetric centroid type-reduced interval type-2 fuzzy PI and PD contr ollers, IEEE Trans. on Fuzzy Systems 20 (3) (2012) 416–430
work page 2012
-
[43]
M. Nie, W. W. Tan, Towards an efficient type-reduction me thod for interval type-2 fuzzy logic systems, in: Proc. IEEE Int’l Co nf. on Fuzzy Systems, Hong Kong, 2008
work page 2008
-
[44]
M. A. Sanchez, O. Castillo, J. R. Castro, Information gr anule formation via the concept of uncertainty-based information with inte rval type-2 fuzzy sets representation and Takagi-Sugeno-Kang consequ ents opti- mized with Cuckoo search, Applied Soft Computing 27 (2015) 6 02– 609
work page 2015
-
[45]
H. B. Sola, J. Fernandez, H. Hagras, F. Herrera, M. Pagol a, E. Bar- renechea, Interval type-2 fuzzy sets are generalization of interval-valued fuzzy sets: Toward a wider view on their relationship, IEEE T rans. on Fuzzy Systems 23 (5) (2015) 1876–1882
work page 2015
- [46]
-
[47]
C. W. Tao, J. S. Taur, C.-W. Chang, Y .-H. Chang, Simplifie d type-2 fuzzy sliding controller for wing rock system, Fuzzy Sets an d Systems 207 (16) (2012) 111–129
work page 2012
- [48]
-
[49]
L.-X. Wang, J. M. Mendel, Generating fuzzy rules by lear ning from examples, IEEE Trans. on Systems, Man, and Cybernetics 22 (2 ) (1992) 1414–1427
work page 1992
-
[50]
D. Wu, On the fundamental differences between interval type-2 and type-1 fuzzy logic controllers, IEEE Trans. on Fuzzy System s 20 (5) (2012) 832–848
work page 2012
-
[51]
D. Wu, Twelve considerations in choosing between Gauss ian and trape- zoidal membership functions in interval type-2 fuzzy logic controllers, in: Proc. IEEE World Congress on Computational Intelligenc e, Brisbane, Australia, 2012
work page 2012
-
[52]
D. Wu, Approaches for reducing the computational cost o f interval type-2 fuzzy logic systems: Overview and comparisons, IEEE Trans. on Fuzzy Systems 21 (1) (2013) 80–99
work page 2013
-
[53]
D. Wu, J. M. Mendel, Enhanced Karnik-Mendel Algorithms , IEEE Trans. on Fuzzy Systems 17 (4) (2009) 923–934
work page 2009
-
[54]
D. Wu, J. M. Mendel, On the continuity of type-1 and inter val type- 2 fuzzy logic systems, IEEE Trans. on Fuzzy Systems 19 (1) (20 11) 179–192
-
[55]
D. Wu, J. M. Mendel, Designing practical interval type- 2 fuzzy logic systems made simple, in: Proc. IEEE World Congress on Comput ational Intelligence, Beijing, China, 2014
work page 2014
-
[56]
D. Wu, W. W. Tan, Genetic learning and performance evalu ation of type-2 fuzzy logic controllers, Engineering Applications of Artificial Intelligence 19 (8) (2006) 829–841
work page 2006
-
[57]
D. Wu, W. W. Tan, A simplified type-2 fuzzy controller for real-time control, ISA Trans. 15 (4) (2006) 503–516
work page 2006
-
[58]
C.-Y . Y eh, W.-H. Jeng, S.-J. Lee, An enhanced type-redu ction algorithm for type-2 fuzzy sets, IEEE Trans. on Fuzzy Systems 19 (2) (20 11) 227– 240
-
[59]
L. A. Zadeh, The concept of a linguistic variable and its application to approximate reasoning-1, Information Sciences 8 (1975) 19 9–249
work page 1975
-
[60]
H. Zhou, H. Ying, A method for deriving the analytical st ructure of a broad class of typical interval type-2 Mamdani fuzzy contro llers, IEEE Trans. on Fuzzy Systems 21 (3) (2013) 447–458
work page 2013
-
[61]
H. Zhou, H. Ying, Deriving and analyzing analytical str uctures of a class of typical interval type-2 TS fuzzy controllers, IEEE Trans. on Cybernetics 47 (9) (2017) 2492–2503
work page 2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.