Disturbance-Aware Aerial Robotics for Ethical Wildlife Monitoring
Pith reviewed 2026-06-27 19:34 UTC · model grok-4.3
The pith
Reinforcement learning policies for drones outperform rule-based baselines in tracking wildlife while minimizing disturbance.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that a disturbance-aware reinforcement-learning-based framework, coupling a zoologically grounded simulation with fitted animal movement models and a reward that balances observation quality and disturbance risk, produces policies that consistently surpass rule-based baselines across three species and four behavior models while generalizing across tasks, dynamics, and drone types.
What carries the argument
Disturbance-aware reinforcement learning framework trained in a simulation environment fitted to real animal trajectories, using a reward that captures the observation-disturbance trade-off.
If this is right
- Learned policies can be deployed on heterogeneous aerial robotic fleets for autonomous tracking.
- Policies generalize without retraining to new monitoring tasks, animal dynamics, and drone types.
- This establishes disturbance-aware learning as a viable foundation for non-invasive autonomous wildlife observation.
- Opens a path towards scalable, ethically responsible robotic monitoring in ecology and conservation.
Where Pith is reading between the lines
- This framework could be adapted for monitoring in other sensitive environments where minimizing impact is key.
- Real-world validation would be needed to confirm the simulation accurately predicts disturbance levels.
- Such methods might influence policy on the use of drones in conservation by providing data on minimal-impact approaches.
Load-bearing premise
The zoologically grounded simulation environment accurately represents natural animal behaviors and the observation-disturbance trade-off using models fitted from real trajectory statistics.
What would settle it
A real-world experiment deploying the policies on drones near actual animals and finding that disturbance levels are not lower than with rule-based methods or that generalization fails for new species.
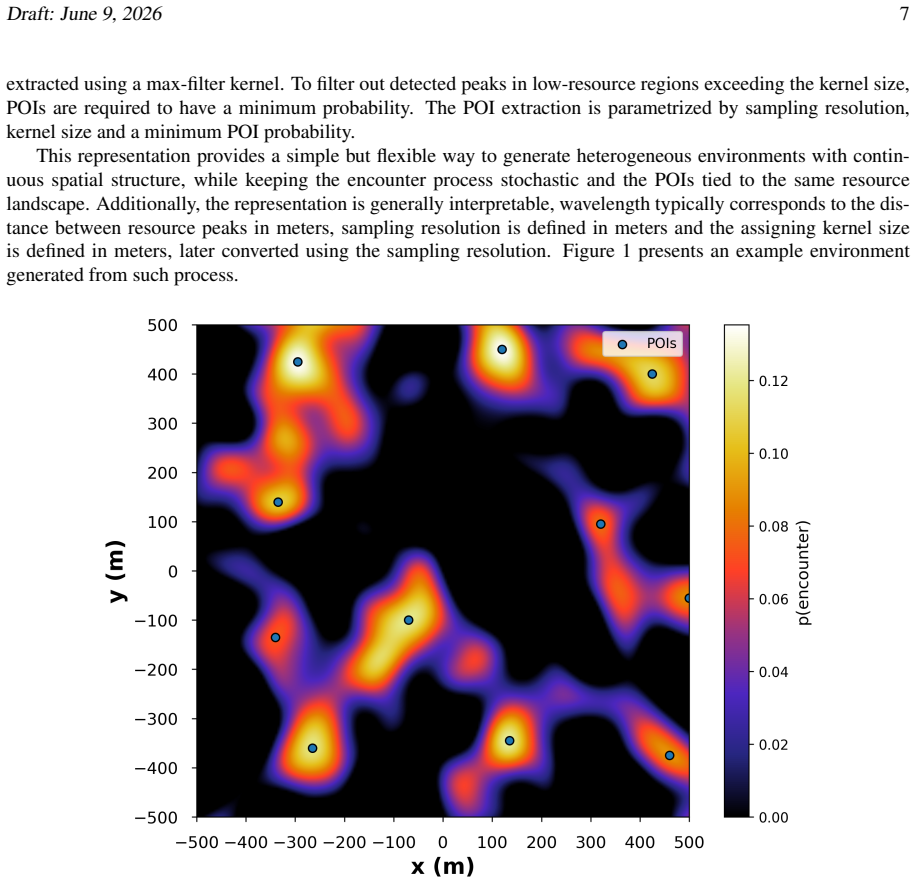
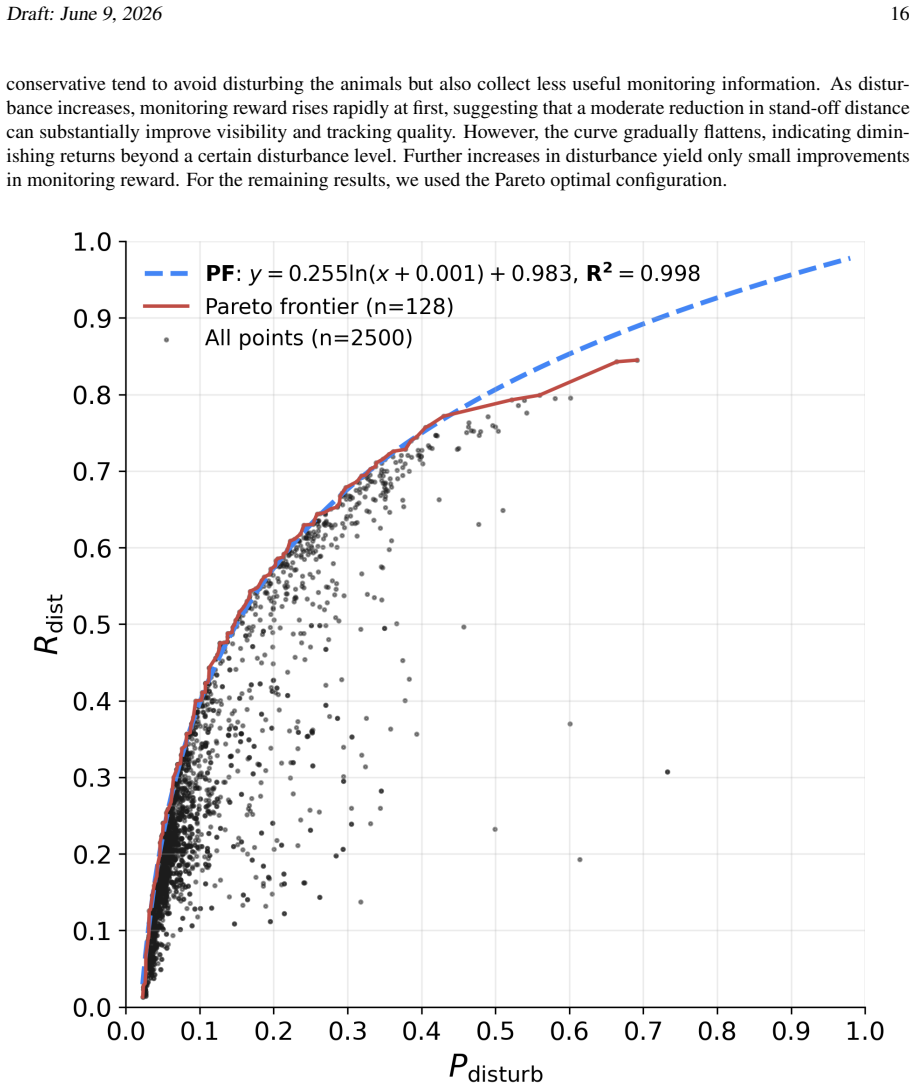
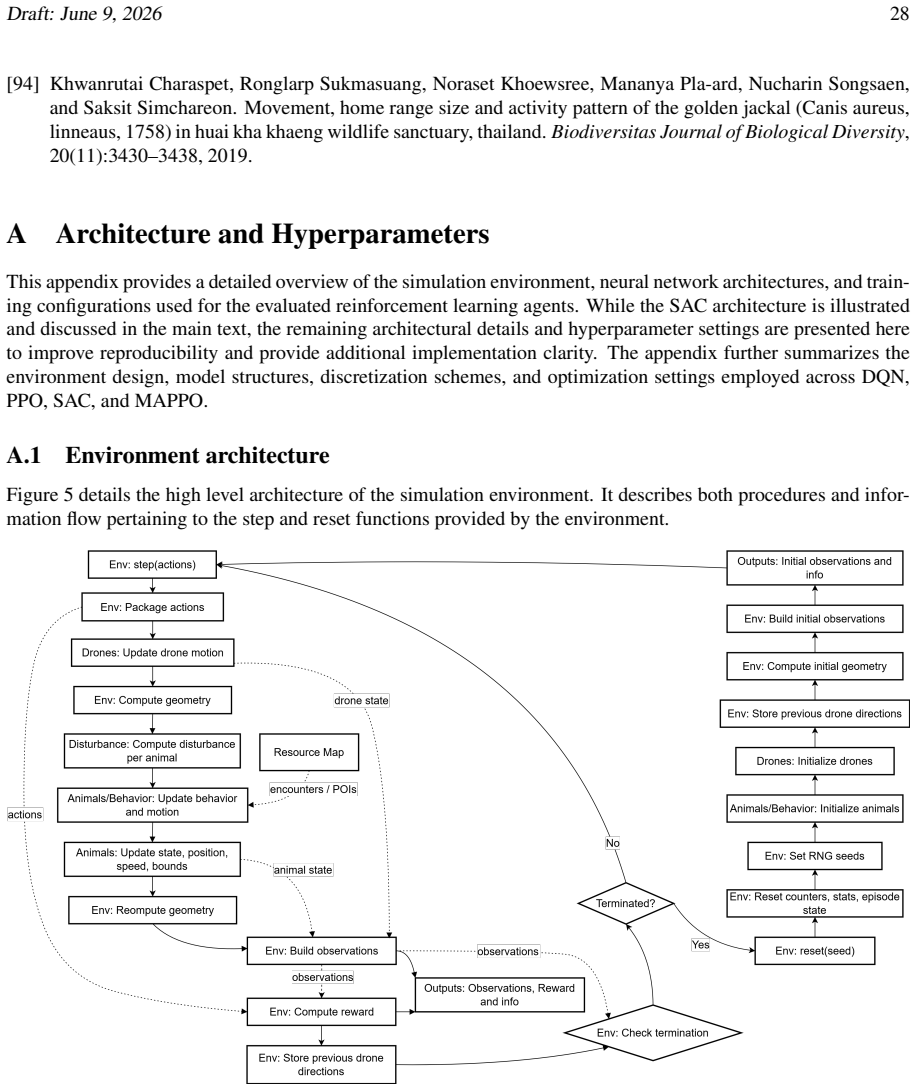
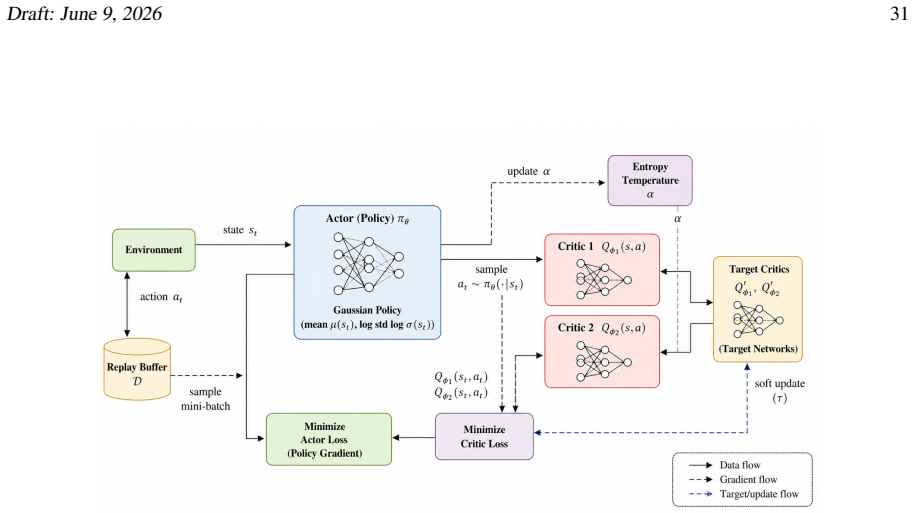
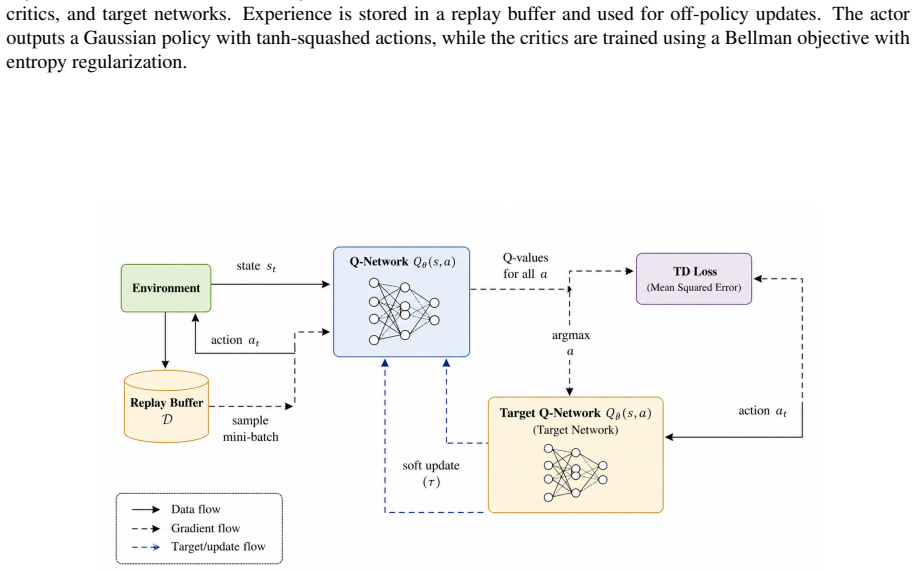
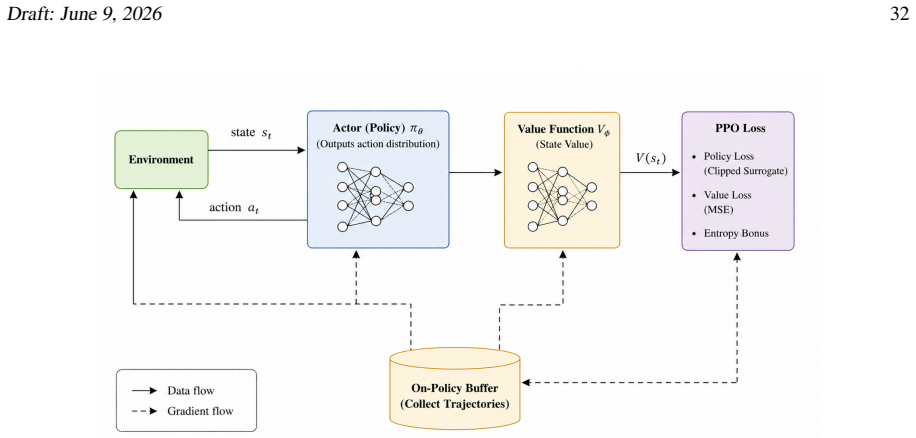
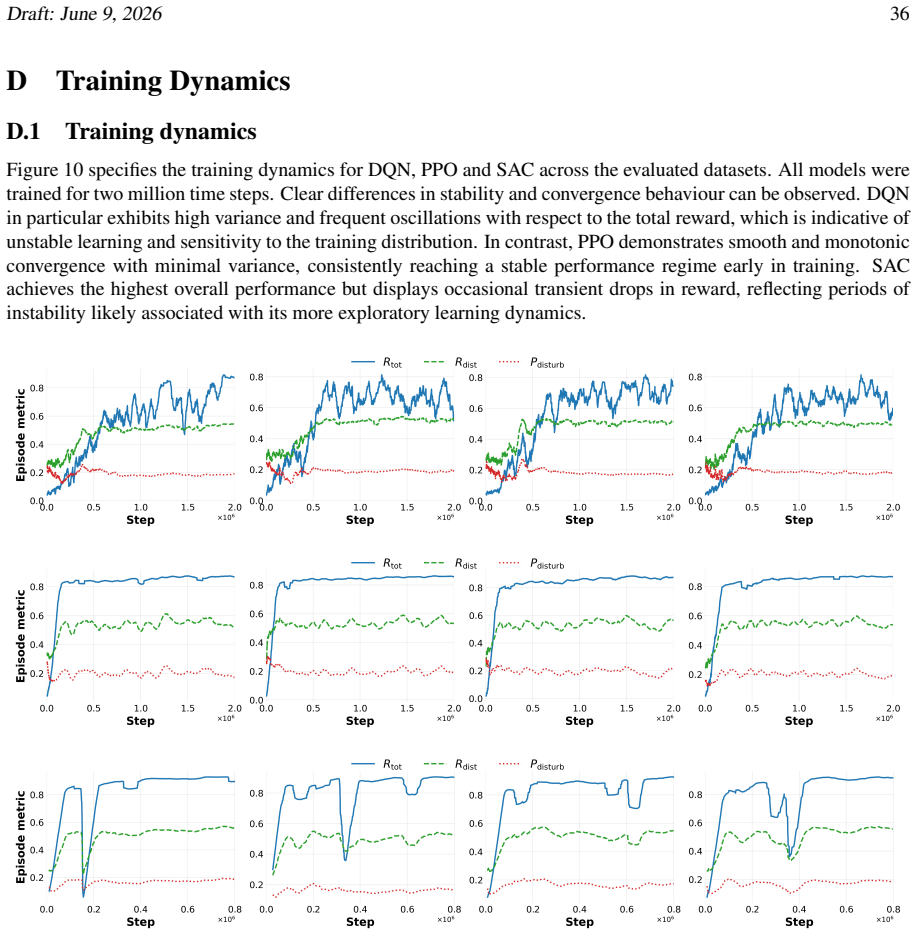
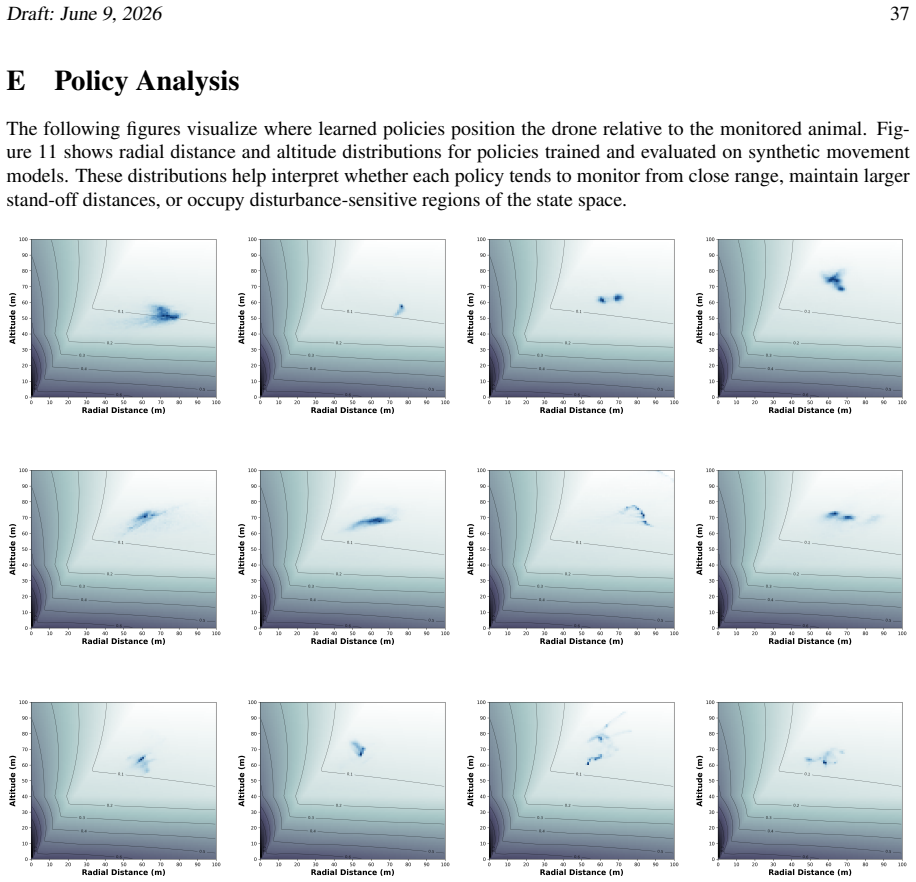
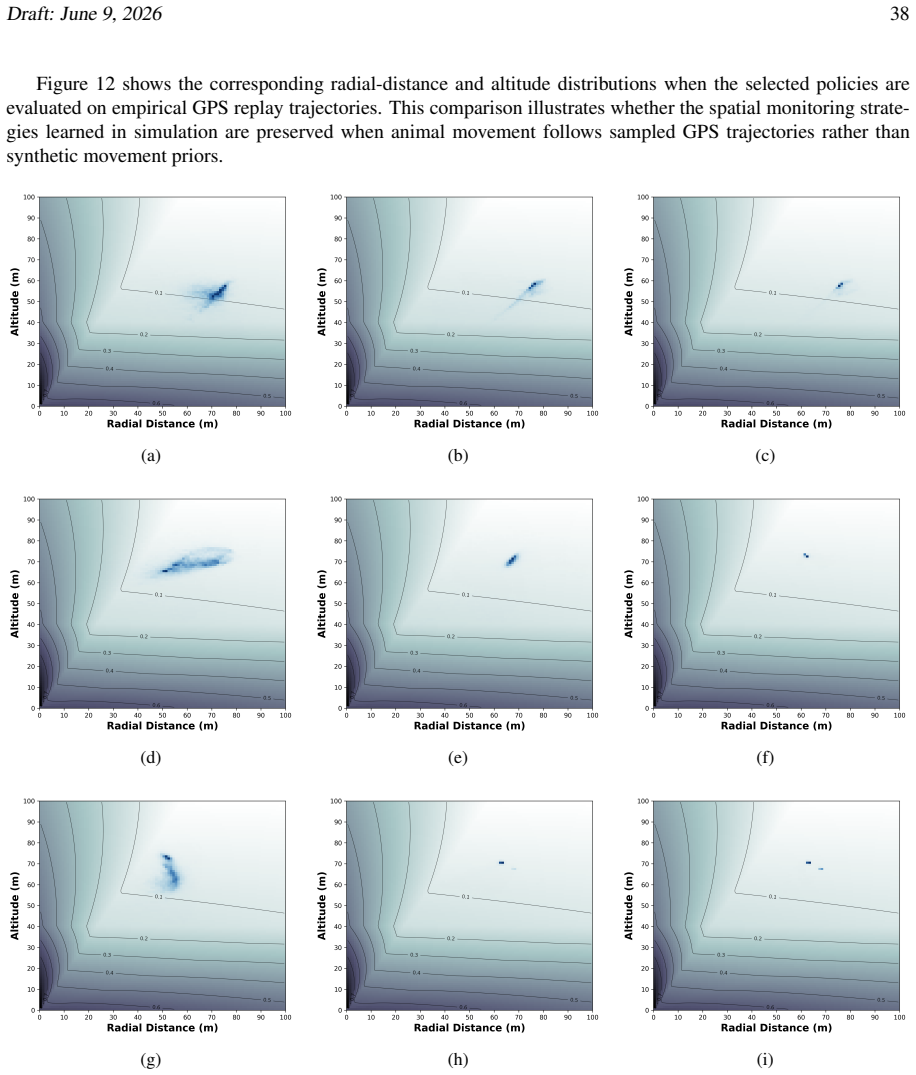
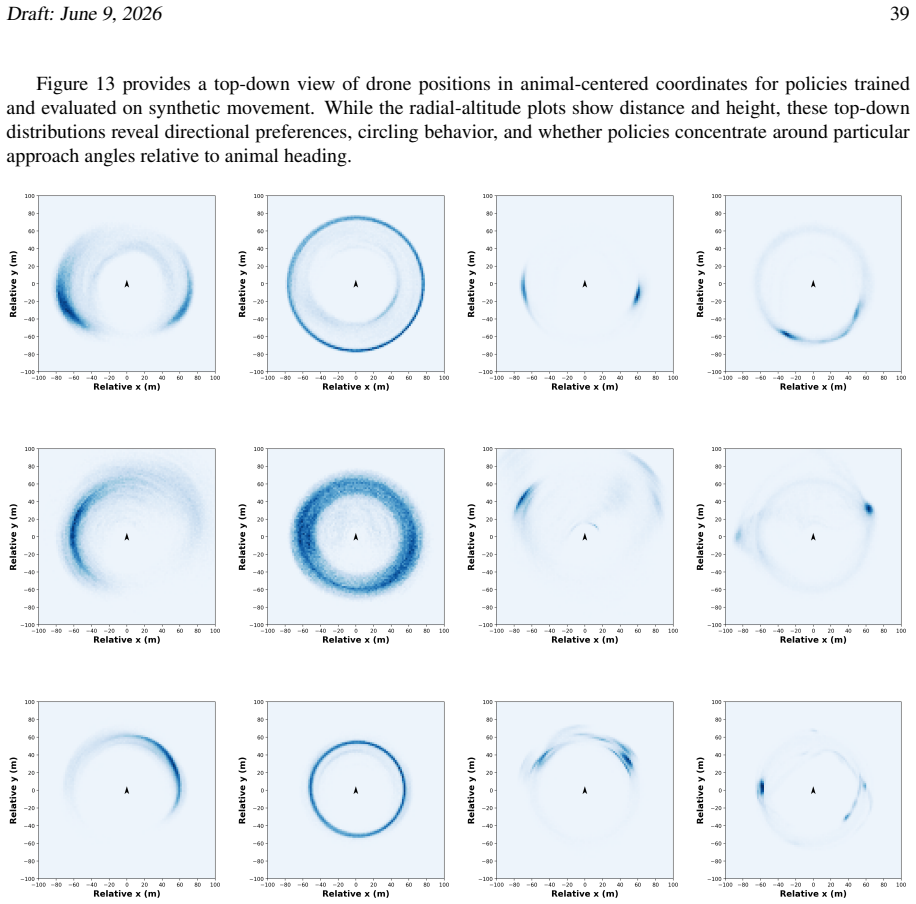
Figures
read the original abstract
Reliable wildlife monitoring is essential for ecology and conservation, yet many existing methods, such as tagging, capture, and close-range observation, can alter the very behaviors they aim to measure. Aerial robots offer a scalable alternative, which has shown promising performance in multiple studies. Nonetheless, existing approaches typically lack behavioral awareness, rely on fixed heuristics, or require real-world training data that are costly, impractical, and ethically difficult to obtain. As a result, there remains no general framework for adaptive drone-based monitoring that can both preserve ecological validity and scale across species, behaviors, and robotic platforms. In this study, we introduce a disturbance-aware reinforcement-learning-based framework for heterogeneous aerial robotic fleets that enables autonomous wildlife tracking while explicitly minimizing behavioral disruption. We couple a zoologically grounded simulation environment with fitted animal movement models derived from real trajectory statistics, and train control policies using a reward formulation that captures the trade-off between observation quality and disturbance risk. Across three species (pigeon, jackal, and spur-winged lapwing) with distinct ecologies and motion patterns and four increasingly strategic behavior models common in nature, the learned policies consistently surpassed currently used rule-based baselines and generalized across monitoring tasks, animal dynamics, and drone types. These results establish disturbance-aware learning as a viable foundation for non-invasive autonomous wildlife observation, opening a path towards scalable, ethically responsible, and scientifically reliable robotic monitoring in ecology and conservation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a disturbance-aware reinforcement learning framework for heterogeneous aerial robotic fleets to perform autonomous wildlife tracking while minimizing behavioral disruption. It couples a zoologically grounded simulation (with animal movement models fitted to real trajectory statistics) and a reward formulation trading off observation quality against disturbance risk. Across three species (pigeon, jackal, spur-winged lapwing) and four increasingly strategic behavior models, the learned policies are reported to outperform rule-based baselines and to generalize across monitoring tasks, animal dynamics, and drone types.
Significance. If the simulation accurately captures the observation-disturbance trade-off and the reported performance gains hold under rigorous validation, the work would provide a scalable, simulation-only training route for ethically responsible drone-based monitoring that avoids real-world training data collection. This could meaningfully advance non-invasive methods in ecology and conservation.
major comments (2)
- [Abstract] Abstract: the central claim that 'the learned policies consistently surpassed currently used rule-based baselines and generalized across monitoring tasks, animal dynamics, and drone types' is presented without any description of experimental setup, number of trials, statistical tests, error bars, or cross-validation procedure, rendering it impossible to evaluate whether the results support the generalization claim.
- [Simulation environment and evaluation sections] Simulation environment and evaluation sections: animal movement models are fitted to real trajectory statistics, yet no real-world measurements of drone-induced disturbance (flight initiation distance, evasion tactics, or habituation) are reported; all training and testing remain in simulation. This is load-bearing for the transferability and ethical-validity claims, because any mismatch between modeled and actual behavioral responses would invalidate the reward formulation and resulting policies.
minor comments (1)
- [Abstract] The abstract states results for 'four increasingly strategic behavior models common in nature' but does not name or briefly characterize those models; adding one sentence would improve readability.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'the learned policies consistently surpassed currently used rule-based baselines and generalized across monitoring tasks, animal dynamics, and drone types' is presented without any description of experimental setup, number of trials, statistical tests, error bars, or cross-validation procedure, rendering it impossible to evaluate whether the results support the generalization claim.
Authors: We agree that the abstract would benefit from additional context. In the revised manuscript we will expand the abstract to briefly note the simulation-based experimental setup, the use of multiple trials across species and drone types, and that performance comparisons include statistical measures. Full details on trial counts, variance, and cross-validation procedures already appear in the Evaluation section; the abstract revision will improve accessibility without altering its length constraints. revision: yes
-
Referee: [Simulation environment and evaluation sections] Simulation environment and evaluation sections: animal movement models are fitted to real trajectory statistics, yet no real-world measurements of drone-induced disturbance (flight initiation distance, evasion tactics, or habituation) are reported; all training and testing remain in simulation. This is load-bearing for the transferability and ethical-validity claims, because any mismatch between modeled and actual behavioral responses would invalidate the reward formulation and resulting policies.
Authors: The work is deliberately scoped as a simulation-only framework precisely to avoid the ethical and practical difficulties of collecting real-world training data on disturbance, as stated in the introduction. Animal movement models are fitted to published trajectory statistics and disturbance parameters are drawn from existing zoological literature. We will add an explicit limitations section that qualifies all generalization and ethical claims to the simulated setting and discusses the modeling assumptions. We cannot supply new empirical disturbance measurements because none were collected. revision: partial
- Absence of new real-world measurements of drone-induced disturbance (flight initiation distance, evasion tactics, or habituation)
Circularity Check
No circularity: simulation-trained RL policies evaluated against independent baselines
full rationale
The paper derives policies via reinforcement learning in a simulation whose animal dynamics are fitted once from external trajectory data; the reward explicitly trades off two distinct objectives, and performance claims rest on out-of-sample comparisons to rule-based baselines within that simulation. No step reduces a claimed prediction to a fitted parameter by definition, no self-citation chain carries the central result, and the derivation chain remains independent of its own outputs.
Axiom & Free-Parameter Ledger
free parameters (2)
- reward formulation weights
- animal movement model parameters
axioms (1)
- domain assumption Fitted animal movement models from real trajectories sufficiently represent natural behaviors and disturbance responses across species
Reference graph
Works this paper leans on
-
[1]
Linking movement ecology with wildlife management and conser- vation.Frontiers in Ecology and Evolution, 3:155, 2016
Andrew M Allen and Navinder J Singh. Linking movement ecology with wildlife management and conser- vation.Frontiers in Ecology and Evolution, 3:155, 2016
2016
-
[2]
Novel opportunities for wildlife conservation and research with real-time monitoring.Ecological Applications, 24(4):593–601, 2014
Jake Wall, George Wittemyer, Brian Klinkenberg, and Iain Douglas-Hamilton. Novel opportunities for wildlife conservation and research with real-time monitoring.Ecological Applications, 24(4):593–601, 2014
2014
-
[3]
John Wiley & Sons, 2001
Caryl L Elzinga, Daniel W Salzer, John W Willoughby, and James P Gibbs.Monitoring plant and animal populations: a handbook for field biologists. John Wiley & Sons, 2001
2001
-
[4]
Justin Irvine, Philip A
Sol `ene Marion, Althea Davies, Urˇska Demˇsar, R. Justin Irvine, Philip A. Stephens, and Jed Long. A system- atic review of methods for studying the impacts of outdoor recreation on terrestrial wildlife.Global Ecology and Conservation, 22:e00917, 2020
2020
-
[5]
Lahoz-Monfort and Michael J
Jos ´e J. Lahoz-Monfort and Michael J. L. Magrath. A comprehensive overview of technologies for species and habitat monitoring and conservation.BioScience, 71(10):1038–1062, 2021
2021
-
[6]
Teddy Lazebnik, Yehuda Samuel, Jonathan Tichon, Roi Lapid, Roni King, Tomer Nissimyan, and Orr Spiegel. An empirically-parameterized spatio-temporal extended-sir model for combined dilution and vac- cination mitigation for rabies outbreaks in wild jackals.Ecological Modelling, 514:111487, 2026
2026
-
[7]
Selection of timescales to study social network temporal dynamics in vultures.Animal Behaviour, 232:123442, 2026
Kaija Gahm, Elvira D’Bastiani, Nili Anglister, Gideon Vaadia, Marta Ac ´acio, Orr Spiegel, and Noa Pinter- Wollman. Selection of timescales to study social network temporal dynamics in vultures.Animal Behaviour, 232:123442, 2026
2026
-
[8]
Cole Burton, Eric Neilson, Dario Moreira, Andrew Ladle, Robin Steenweg, Jason T
A. Cole Burton, Eric Neilson, Dario Moreira, Andrew Ladle, Robin Steenweg, Jason T. Fisher, Erin Bayne, and Stan Boutin. Wildlife camera trapping: a review and recommendations for linking surveys to ecological processes.Journal of Applied Ecology, 52(3):675–685, 2015
2015
-
[9]
Kolowski and Tavis D
Joseph M. Kolowski and Tavis D. Forrester. Camera trap placement and the potential for bias due to trails and other features.PLOS ONE, 12(10):e0186679, 2017
2017
-
[10]
Cole Burton, Douglas A
Anthony Caravaggi, A. Cole Burton, Douglas A. Clark, Jason T. Fisher, Amelia Grass, Sian Green, Catherine Hobaiter, Tim R. Hofmeester, Ammie K. Kalan, Daniella Rabaiotti, and Danielle Rivet. A review of factors to consider when using camera traps to study animal behavior to inform wildlife ecology and conservation. Conservation Science and Practice, 2(8):...
2020
-
[11]
Gallagher, Robert Hering, Thomas M¨uller, Marlee Tucker, Marco Apollonio, Janosch Arnold, et al
Jonas Stiegler, Cara A. Gallagher, Robert Hering, Thomas M¨uller, Marlee Tucker, Marco Apollonio, Janosch Arnold, et al. Mammals show faster recovery from capture and tagging in human-disturbed landscapes. Nature Communications, 15:8079, 2024
2024
-
[12]
Monitoring animal behaviour and environmental interactions using wireless sensor networks, gps collars and satellite remote sensing.Sensors, 9(05):3586–3603, 2009
Rebecca N Handcock, Dave L Swain, Greg J Bishop-Hurley, Kym P Patison, Tim Wark, Philip Valencia, Peter Corke, and Christopher J O’Neill. Monitoring animal behaviour and environmental interactions using wireless sensor networks, gps collars and satellite remote sensing.Sensors, 9(05):3586–3603, 2009
2009
-
[13]
The effects of gps collars on african elephant (loxodonta africana) behavior at the san diego zoo safari park.Applied Animal Behaviour Science, 142(1-2):76–81, 2012
Kristina Marie Horback, Lance Joseph Miller, Jeffrey Andrews, Stanley Abraham Kuczaj II, and Matthew Anderson. The effects of gps collars on african elephant (loxodonta africana) behavior at the san diego zoo safari park.Applied Animal Behaviour Science, 142(1-2):76–81, 2012. Draft: June 9, 2026 23
2012
-
[14]
Drones and ai-driven solutions for wildlife monitoring.Drones, 9(7):455, 2025
Nourdine Aliane. Drones and ai-driven solutions for wildlife monitoring.Drones, 9(7):455, 2025
2025
-
[15]
Lucia Pedrazzi, Hemal Naik, Chris Sandbrook, Miguel Lurgi, Ines F ¨urtbauer, and Andrew J. King. Advanc- ing animal behaviour research using drone technology.Animal Behaviour, 222:123147, 2025
2025
-
[16]
Robotic ecology: Tracking small dynamic animals with an autonomous aerial vehicle.Science robotics, 3(23):eaat8409, 2018
Oliver M Cliff, Debra L Saunders, and Robert Fitch. Robotic ecology: Tracking small dynamic animals with an autonomous aerial vehicle.Science robotics, 3(23):eaat8409, 2018
2018
-
[17]
Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in?Journal of Unmanned Vehicle Systems, 3(4):137–155, 2015
Dominique Chabot and David M Bird. Wildlife research and management methods in the 21st century: Where do unmanned aircraft fit in?Journal of Unmanned Vehicle Systems, 3(4):137–155, 2015
2015
-
[18]
Review on robotic systems for environmental monitoring.IEEE Open Journal of Instrumentation and Measurement, 4:1–17, 2024
DMG Preethichandra, Lasitha Piyathilaka, and Umer Izhar. Review on robotic systems for environmental monitoring.IEEE Open Journal of Instrumentation and Measurement, 4:1–17, 2024
2024
-
[19]
Hvala, Rebecca M
Aliesha H. Hvala, Rebecca M. Rogers, Mamoun Alazab, and Hamish A. Campbell. Supplementing aerial drone surveys with biotelemetry data validates wildlife detection probabilities.Frontiers in Conservation Science, 4:1203736, 2023
2023
-
[20]
Elephant habituation to drones as a behavioural observation tool.Scientific Reports, 15:39329, 2025
Angus Carey-Douglas, Liam Jasperse-Sjolander, Paul Kokiro, Gideon Galimogle Ilterewa, David Lolchuragi, Jemima Elizabeth Scrase, Frank Pope, Fritz V ollrath, and Giacomo D’Ammando. Elephant habituation to drones as a behavioural observation tool.Scientific Reports, 15:39329, 2025
2025
-
[21]
Gokarna Jung Thapa, Kanchan Thapa, Shashank Poudel, Dil Bahadur Purja Pun, Sujita Shrestha, Prem Poudel, Hari Bhadra Acharya, Bal Kumar Lamsal, Rajesh Sada, and Serge A. Wich. Eyes in the sky: Drone monitoring of the largest gharial and mugger populations in the east rapti river, chitwan national park.PLOS ONE, 20(8):e0330350, 2025
2025
-
[22]
Challenges and limitations of ai in wildlife con- servation
Uma Shekhawat, Udham Singh Rana, and Neenu Saini. Challenges and limitations of ai in wildlife con- servation. InAI and Machine Learning Techniques for Wildlife Conservation, pages 97–132. IGI Global Scientific Publishing, 2025
2025
-
[23]
Impact of drone disturbances on wildlife: A review.Drones, 9(4):311, 2025
Salman Afridi et al. Impact of drone disturbances on wildlife: A review.Drones, 9(4):311, 2025
2025
-
[24]
Vanderklift, and Amanda J
Daniel Axford, Ferdous Sohel, Mathew A. Vanderklift, and Amanda J. Hodgson. Collectively advancing deep learning for animal detection in drone imagery: Successes, challenges, and research gaps.Ecological Informatics, 83:102842, 2024
2024
-
[25]
Xiaohui Li, Hailong Huang, and Andrey V . Savkin. Autonomous navigation of an aerial drone to observe a group of wild animals with reduced visual disturbance.IEEE Systems Journal, 16(2):3339–3348, 2022
2022
-
[26]
Kline, Alison Zhong, Kevyn Irizarry, Charles V
Jenna M. Kline, Alison Zhong, Kevyn Irizarry, Charles V . Stewart, Christopher Stewart, Daniel I. Rubenstein, and Tanya Berger-Wolf. Wildwing: An open-source, autonomous and affordable uas for animal behaviour video monitoring.Methods in Ecology and Evolution, 2025
2025
-
[27]
Wilddrone: autonomous drone technology for monitoring wildlife populations
Ulrik Pagh Schultz Lundquist, Salman Afridi, Camille Berthelot, Nguyen Ngoc Dat, Konrad Hlebowicz, Edoardo Iannino, et al. Wilddrone: autonomous drone technology for monitoring wildlife populations. Frontiers in Robotics and AI, 12:1695319, 2026
2026
-
[28]
Deep reinforcement learning of mobile robot navigation in dynamic environment: A review.Sensors, 25(11):3394, 2025
Yingjie Zhu, Wan Zuha Wan Hasan, Hafiz Rashidi Harun Ramli, Nor Mohd Haziq Norsahperi, Muhamad Saufi Mohd Kassim, and Yiduo Yao. Deep reinforcement learning of mobile robot navigation in dynamic environment: A review.Sensors, 25(11):3394, 2025
2025
-
[29]
Adaptive policy switching for efficient multi-robot coordination using reinforcement learning.International Journal of Robotics & Control Systems, 5(6), 2025
Mohamed Nadour, Lakhmissi Cherroun, Imad Eddine Tibermacine, Abdelaziz Rabehi, and Alfian Ma’arif. Adaptive policy switching for efficient multi-robot coordination using reinforcement learning.International Journal of Robotics & Control Systems, 5(6), 2025
2025
-
[30]
Reinforcement learning in robotic applications: a comprehensive survey.Artificial intelligence review, 55(2):945–990, 2022
Bharat Singh, Rajesh Kumar, and Vinay Pratap Singh. Reinforcement learning in robotic applications: a comprehensive survey.Artificial intelligence review, 55(2):945–990, 2022. Draft: June 9, 2026 24
2022
-
[31]
Autonomous obstacle avoidance and target tracking of uav based on deep reinforcement learning.Journal of Intelligent & Robotic Systems, 104:60, 2022
Guoqiang Xu, Weilai Jiang, Zhaolei Wang, and Yaonan Wang. Autonomous obstacle avoidance and target tracking of uav based on deep reinforcement learning.Journal of Intelligent & Robotic Systems, 104:60, 2022
2022
-
[32]
Xiaoran Kong, Yatong Zhou, Zhe Li, and Shaohai Wang. Multi-uav simultaneous target assignment and path planning based on deep reinforcement learning in dynamic multiple obstacles environments.Frontiers in Neurorobotics, 17:1302898, 2024
2024
-
[33]
Socially aware navigation for mobile robots: a survey on deep reinforcement learning approaches.Applied Intelligence, 56(1):38, 2026
Ibrahim Khalil Kabir and Muhammad Faizan Mysorewala. Socially aware navigation for mobile robots: a survey on deep reinforcement learning approaches.Applied Intelligence, 56(1):38, 2026
2026
-
[34]
Evolution of socially-aware robot navigation.Electronics, 12(7):1570, 2023
Silvia Guill ´en-Ruiz, Juan Pedro Bandera, Alejandro Hidalgo-Paniagua, and Antonio Bandera. Evolution of socially-aware robot navigation.Electronics, 12(7):1570, 2023
2023
-
[35]
Multi-objective crowd-aware robot navigation system using deep reinforcement learning.Applied Soft Computing, 151:111154, 2024
Chien-Lun Cheng, Chen-Chien Hsu, Saeed Saeedvand, and Jun-Hyung Jo. Multi-objective crowd-aware robot navigation system using deep reinforcement learning.Applied Soft Computing, 151:111154, 2024
2024
-
[36]
Crowd-aware socially compliant robot navigation via deep reinforcement learning.International Journal of Social Robotics, 16:197–209, 2024
Bingxin Xue, Ming Gao, Chaoqun Wang, Yao Cheng, and Fengyu Zhou. Crowd-aware socially compliant robot navigation via deep reinforcement learning.International Journal of Social Robotics, 16:197–209, 2024
2024
-
[37]
Yoccoz, James D
Nigel G. Yoccoz, James D. Nichols, and Thierry Boulinier. Monitoring of biological diversity in space and time.Trends in Ecology & Evolution, 16(8):446–453, 2001
2001
-
[38]
Crofoot, Walter Jetz, and M
Roland Kays, M.C. Crofoot, Walter Jetz, and M. Wikelski. Terrestrial animal tracking as an eye on life and planet.Science, 348:aaa2478–1, 01 2015
2015
-
[39]
Human disturbance: people as predation-free predators?Journal of Applied Ecology, 41(2):335–343, 2004
Colin M Beale and Pat Monaghan. Human disturbance: people as predation-free predators?Journal of Applied Ecology, 41(2):335–343, 2004
2004
-
[40]
Meta-analysis of transmitter effects on avian behaviour and ecology.Methods in Ecology and Evolution, 1(2):180–187, 2010
David G Barron, Jeffrey D Brawn, and Patrick J Weatherhead. Meta-analysis of transmitter effects on avian behaviour and ecology.Methods in Ecology and Evolution, 1(2):180–187, 2010
2010
-
[41]
Bodey, Ian R
Thomas W. Bodey, Ian R. Cleasby, Fraser Bell, Nicole Parr, Anthony Schultz, Stephen C. V otier, and Stuart Bearhop. A phylogenetically controlled meta-analysis of biologging device effects on birds: Deleterious effects and a call for more standardized reporting of study data.Methods in Ecology and Evolution, 9(4):946– 955, 2018
2018
-
[42]
Opportunities and risks in the use of drones for studying animal behaviour
Lukas Schad and Julia Fischer. Opportunities and risks in the use of drones for studying animal behaviour. Methods in Ecology and Evolution, 14(8):1864–1872, 2023
2023
-
[43]
Unmanned aircraft systems in wildlife research: current and future applications of a transformative technology.Frontiers in Ecology and the Environment, 14(5):241–251, 2016
Katherine S Christie, Sarah L Gilbert, Corinne L Brown, Michael Hatfield, and Lori Hanson. Unmanned aircraft systems in wildlife research: current and future applications of a transformative technology.Frontiers in Ecology and the Environment, 14(5):241–251, 2016
2016
-
[44]
Approaching birds with drones: first experiments and ethical guidelines.Biology Letters, 11(2):20140754, 02 2015
Elisabeth Vas, Am´elie Lescro¨el, Olivier Duriez, Guillaume Boguszewski, and David Gr´emillet. Approaching birds with drones: first experiments and ethical guidelines.Biology Letters, 11(2):20140754, 02 2015
2015
-
[45]
Spiegel, Eleanor R
Isla Duporge, Marcus P. Spiegel, Eleanor R. Thomson, Tatiana Chapman, Curt Lamberth, Caroline Pond, David W. Macdonald, Tiejun Wang, and Holger Klinck. Determination of optimal flight altitude to min- imise acoustic drone disturbance to wildlife using species audiograms.Methods in Ecology and Evolution, 12(11):2196–2207, 2021
2021
-
[46]
A meta-analysis of the impact of drones on birds.Fron- tiers in Ecology and the Environment, 23(2):e2809, 2025
´Emile Brisson-Curadeau, Rose Lacombe, Marianne Gousy-Leblanc, Vanessa Poirier, Lauren Jackson, Christina Petalas, Eliane Miranda, Alyssa Eby, Julia Baak, Don-Jean L ´eandri-Breton, Emily Choy, Jade Legros, Elena Tranze-Drabinia, and Kyle H Elliott. A meta-analysis of the impact of drones on birds.Fron- tiers in Ecology and the Environment, 23(2):e2809, 2...
2025
-
[47]
Human-aware robot navigation: A survey.Robotics and Autonomous Systems, 61(12):1726–1743, 2013
Thibault Kruse, Amit Kumar Pandey, Rachid Alami, and Alexandra Kirsch. Human-aware robot navigation: A survey.Robotics and Autonomous Systems, 61(12):1726–1743, 2013
2013
-
[48]
Hamid Rezatofighi, and Damith C
Hoa Van Nguyen, Michael Chesser, Lian Pin Koh, S. Hamid Rezatofighi, and Damith C. Ranasinghe. Trackerbots: Autonomous unmanned aerial vehicle for real-time localization and tracking of multiple radio- tagged animals.Journal of Field Robotics, 36(3):617–635, 2019
2019
-
[49]
Taggart, Katrina Falkner, S
Fei Chen, Hoa Van Nguyen, David A. Taggart, Katrina Falkner, S. Hamid Rezatofighi, and Damith C. Ranas- inghe. Conservationbots: Autonomous aerial robot for fast robust wildlife tracking in complex terrains. Journal of Field Robotics, 41(2):443–469, 2024
2024
-
[50]
Decentralized multi-drone coordination for wildlife video acquisition
Denys Grushchak, Jenna Kline, Danilo Pianini, Nicolas Farabegoli, Gianluca Aguzzi, Martina Baiardi, and Christopher Stewart. Decentralized multi-drone coordination for wildlife video acquisition. In2024 IEEE International Conference on Autonomic Computing and Self-Organizing Systems (ACSOS), pages 31–40, 2024
2024
-
[51]
Human-caused disturbance stimuli as a form of predation risk.Conser- vation Ecology, 6(1), 2002
Alejandro Frid and Lawrence Dill. Human-caused disturbance stimuli as a form of predation risk.Conser- vation Ecology, 6(1), 2002
2002
-
[52]
Lima and Peter A
Steven L. Lima and Peter A. Bednekoff. Temporal variation in danger drives antipredator behavior: The predation risk allocation hypothesis.The American Naturalist, 153(6):649–659, 1999
1999
-
[53]
Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review.PLOS ONE, 12(6):1–14, 06 2017
Margarita Mulero-P ´azm´any, Susanne Jenni-Eiermann, Nicolas Strebel, Thomas Sattler, Juan Jos ´e Negro, and Zulima Tablado. Unmanned aircraft systems as a new source of disturbance for wildlife: A systematic review.PLOS ONE, 12(6):1–14, 06 2017
2017
-
[54]
Emily Bennitt, Hattie L. A. Bartlam-Brooks, Tatjana Y . Hubel, and Alan M. Wilson. Terrestrial mammalian wildlife responses to unmanned aerial systems approaches.Scientific Reports, 9(1):2142, Feb 2019
2019
-
[55]
Emergent impacts of multiple predators on prey.Trends in Ecology & Evolution, 13(9):350–355, 1998
Andrew Sih, Goran Englund, and David Wooster. Emergent impacts of multiple predators on prey.Trends in Ecology & Evolution, 13(9):350–355, 1998
1998
-
[56]
A movement ecology paradigm for unifying organismal movement research.Proceedings of the National Academy of Sciences, 105(49):19052–19059, 2008
Ran Nathan, Wayne M Getz, Eloy Revilla, Marcel Holyoak, Ronen Kadmon, David Saltz, and Peter E Smouse. A movement ecology paradigm for unifying organismal movement research.Proceedings of the National Academy of Sciences, 105(49):19052–19059, 2008
2008
-
[57]
Fagan and Justin M
William F. Fagan and Justin M. Calabrese. The correlated random walk and the rise of movement ecology. The Bulletin of the Ecological Society of America, 95(3):204–206, 2014
2014
-
[58]
P. M. Kareiva and N. Shigesada. Analyzing insect movement as a correlated random walk.Oecologia, 56(2):234–238, Feb 1983
1983
-
[59]
Random walk models in biology.Journal of The Royal Society Interface, 5(25):813–834, 04 2008
Edward A Codling, Michael J Plank, and Simon Benhamou. Random walk models in biology.Journal of The Royal Society Interface, 5(25):813–834, 04 2008
2008
-
[60]
Hills, and Inon Scharf
Arik Dorfman, Thomas T. Hills, and Inon Scharf. A guide to area-restricted search: a foundational foraging behaviour.Biological Reviews, 97(6):2076–2089, 2022
2076
-
[61]
The use of space by animals as a function of accessibility and preference.Ecological Modelling, 159(2):239–268, 2003
Jason Matthiopoulos. The use of space by animals as a function of accessibility and preference.Ecological Modelling, 159(2):239–268, 2003
2003
-
[62]
Sutton and Andrew G
Richard S. Sutton and Andrew G. Barto.Reinforcement Learning: An Introduction. MIT Press, Cambridge, MA, 2 edition, 2018
2018
-
[63]
Multi-objective reinforcement learning based on decomposition: A taxonomy and framework.J
Florian Felten, El-Ghazali Talbi, and Gr ´egoire Danoy. Multi-objective reinforcement learning based on decomposition: A taxonomy and framework.J. Artif. Int. Res., 79, April 2024. Draft: June 9, 2026 26
2024
-
[64]
Deep reinforcement learning for robotics: A survey of real-world successes.Annual Review of Control, Robotics, and Autonomous Systems, 8(V olume 8, 2025):153–188, 2025
Chen Tang, Ben Abbatematteo, Jiaheng Hu, Rohan Chandra, Roberto Mart´ın-Mart´ın, and Peter Stone. Deep reinforcement learning for robotics: A survey of real-world successes.Annual Review of Control, Robotics, and Autonomous Systems, 8(V olume 8, 2025):153–188, 2025
2025
-
[65]
A survey of multi-objective sequential decision-making.Journal of Artificial Intelligence Research, 48:67–113, 2013
Diederik M Roijers, Peter Vamplew, Shimon Whiteson, and Richard Dazeley. A survey of multi-objective sequential decision-making.Journal of Artificial Intelligence Research, 48:67–113, 2013
2013
-
[66]
Partially observable markov decision processes in robotics: A survey.IEEE Transactions on Robotics, 39(1):21–40, 2023
Mikko Lauri, David Hsu, and Joni Pajarinen. Partially observable markov decision processes in robotics: A survey.IEEE Transactions on Robotics, 39(1):21–40, 2023
2023
-
[67]
Littman, and Anthony R
Leslie Pack Kaelbling, Michael L. Littman, and Anthony R. Cassandra. Planning and acting in partially observable stochastic domains.Artificial Intelligence, 101(1):99–134, 1998
1998
-
[68]
A comprehensive survey on safe reinforcement learning.Journal of Machine Learning Research, 16(42):1437–1480, 2015
Javier Garc ´ıa and Fernando Fern´andez. A comprehensive survey on safe reinforcement learning.Journal of Machine Learning Research, 16(42):1437–1480, 2015
2015
-
[69]
Sim-to-real transfer in deep reinforcement learning for robotics: a survey
Wenshuai Zhao, Jorge Pe ˜na Queralta, and Tomi Westerlund. Sim-to-real transfer in deep reinforcement learning for robotics: a survey. In2020 IEEE Symposium Series on Computational Intelligence (SSCI), pages 737–744, 2020
2020
-
[70]
Policy invariance under reward transformations: theory and application to reward shaping
Andrew Y Ng, Daishi Harada, and Stuart J Russell. Policy invariance under reward transformations: theory and application to reward shaping. InInternational Conference on Machine Learning (ICML), pages 278– 287, 1999
1999
-
[71]
Barrientos R., Marie Chantelle C
David J. Barrientos R., Marie Chantelle C. Medina, Bruno J. T. Fernandes, and Pablo V . A. Barros. The use of reinforcement learning algorithms in object tracking: A systematic literature review.Neurocomputing, 596:127954, 2024
2024
-
[72]
Drone navigation and avoidance of obstacles through deep reinforcement learning
Ender C ¸ etin, Cristina Barrado, Guillem Mu˜noz, Miquel Macias, and Enric Pastor. Drone navigation and avoidance of obstacles through deep reinforcement learning. In2019 IEEE/AIAA 38th Digital Avionics Systems Conference (DASC), pages 1–7, 2019
2019
-
[73]
Compass: Cooperative multi-agent persistent monitoring using spatio-temporal attention network
Xingjian Zhang, Yizhuo Wang, and Guillaume Sartoretti. Compass: Cooperative multi-agent persistent monitoring using spatio-temporal attention network. In2025 IEEE International Symposium on Multi-Robot and Multi-Agent Systems (MRS), pages 1–7, 2025
2025
-
[74]
Michael Bar-Ziv, Hilla Ziv, Mookie Breuer, Eitam Arnon, Assaf Uzan, and Orr Spiegel. Spur-winged lap- wings show spatial behavioural types with different mobility and exploration between urban and rural indi- viduals.Proceedings of the Royal Society B: Biological Sciences, 292(2038):20242471, 2025
2038
-
[75]
Individual variation affects outbreak magnitude and predictability in multi- pathogen model of pigeons visiting dairy farms.Ecological Modelling, 499:110925, 2025
Teddy Lazebnik and Orr Spiegel. Individual variation affects outbreak magnitude and predictability in multi- pathogen model of pigeons visiting dairy farms.Ecological Modelling, 499:110925, 2025
2025
-
[76]
Procedural environment generation for cave 3d model using opensimplex noise and marching cube
Khalil Satyadama,{Reza Fuad}Rachmadi, and{Supeno Mardi Susiki}Nugroho. Procedural environment generation for cave 3d model using opensimplex noise and marching cube. InCENIM 2020 - Proceeding, CENIM 2020 - Proceeding: International Conference on Computer Engineering, Network, and Intelligent Multimedia 2020, pages 144–148, United States, November 2020. In...
2020
-
[77]
Soluk and Nicholas C
Daniel A. Soluk and Nicholas C. Collins. Synergistic interactions between fish and stoneflies: Facilitation and interference among stream predators.Oikos, 52(1):94–100, 1988
1988
-
[78]
Proximal policy optimiza- tion algorithms, 2017
John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimiza- tion algorithms, 2017. Draft: June 9, 2026 27
2017
-
[79]
Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor
Tuomas Haarnoja, Aurick Zhou, Pieter Abbeel, and Sergey Levine. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor. In Jennifer Dy and Andreas Krause, editors,Pro- ceedings of the 35th International Conference on Machine Learning, volume 80 ofProceedings of Machine Learning Research, pages 1861–1870. PMLR, 10...
2018
-
[80]
Effective defense strategies in network security using improved double dueling deep q-network.Computers & Security, 136:103578, 2024
Zhengwei Zhu, Miaojie Chen, Chenyang Zhu, and Yanping Zhu. Effective defense strategies in network security using improved double dueling deep q-network.Computers & Security, 136:103578, 2024
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.