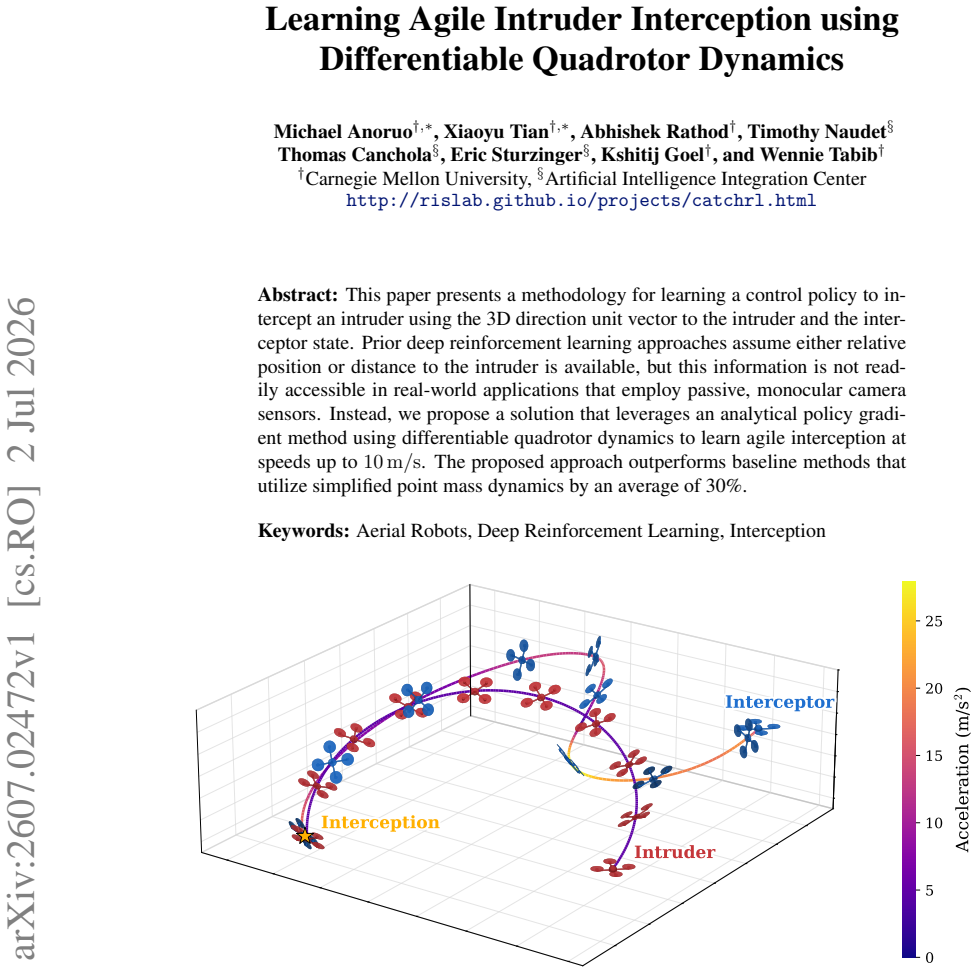
Learning Agile Intruder Interception using Differentiable Quadrotor Dynamics
Pith reviewed 2026-07-03 10:46 UTC · model grok-4.3
The pith
A control policy for quadrotor intruder interception can be learned from monocular direction vectors alone by using differentiable quadrotor dynamics in an analytical policy gradient.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
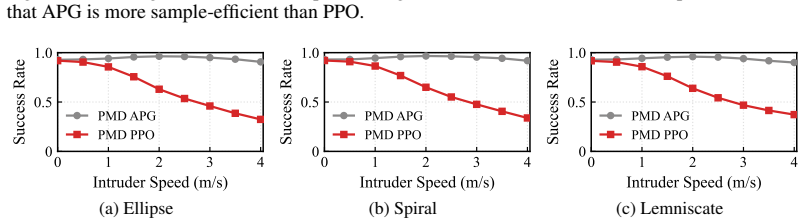
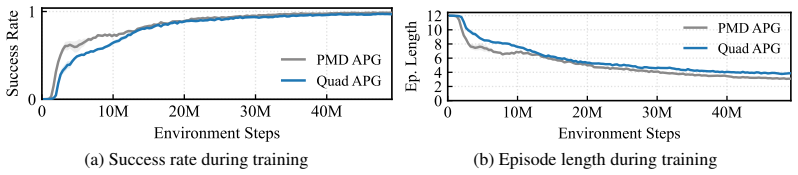
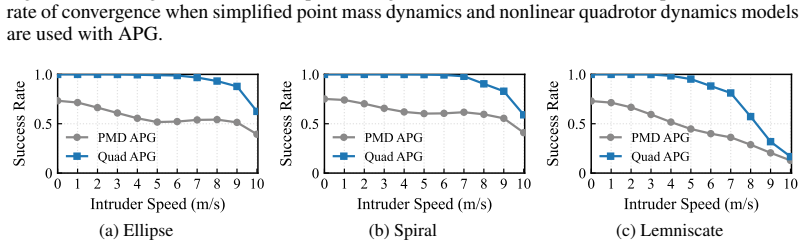
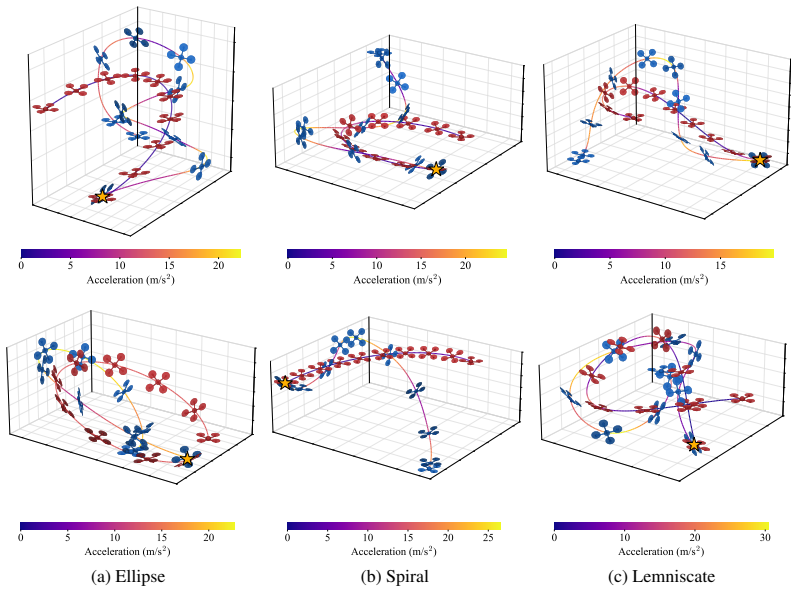
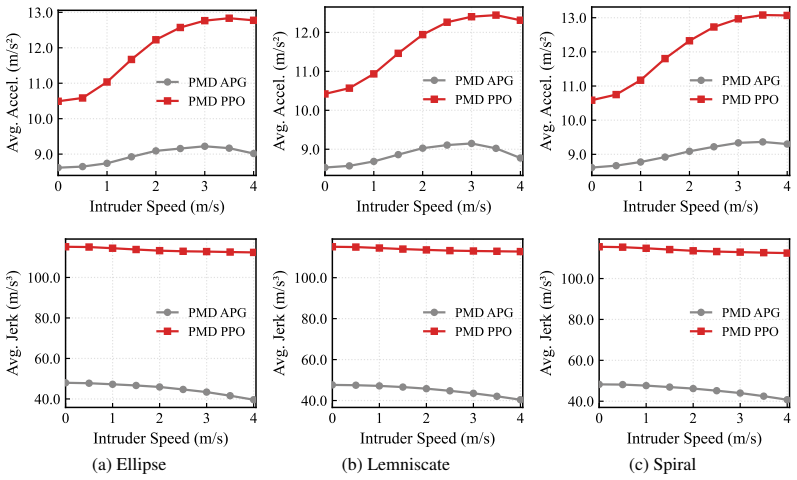
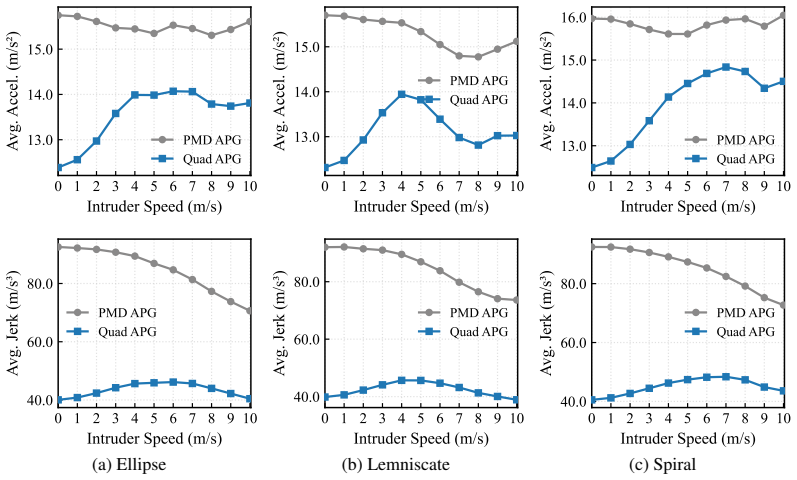
The paper shows that an analytical policy gradient that back-propagates through differentiable quadrotor dynamics can produce interception policies that rely solely on the 3D direction unit vector to the intruder and the interceptor state, and that these policies outperform point-mass baselines by an average of 30 percent while achieving speeds up to 10 m/s.
What carries the argument
Analytical policy gradient that back-propagates through differentiable quadrotor dynamics
If this is right
- Interception remains possible on platforms limited to passive monocular cameras.
- Policies trained with full quadrotor dynamics achieve 30 percent higher success than those trained with point-mass approximations.
- Agile interception is feasible at speeds reaching 10 m/s.
- The same differentiable-dynamics gradient method can be applied to other quadrotor tasks that lack complete state observations.
Where Pith is reading between the lines
- The same direction-only observation model could be tested on fixed-wing or multirotor platforms with different inertia properties.
- Adding realistic camera noise or latency to the direction vector would provide a direct check on whether the learned policies remain stable under sensor imperfections.
- Because the dynamics are fully differentiable, the same training pipeline could be reused for joint optimization of both the policy and a simple estimator that recovers distance from successive direction measurements.
Load-bearing premise
The 3D direction unit vector to the intruder together with the interceptor state supplies enough information to learn a successful interception policy without ever receiving relative position or distance.
What would settle it
A controlled flight test in which the learned policy repeatedly fails to intercept when given only direction vectors, yet succeeds when the same policy is given full relative position.
Figures
read the original abstract
This paper presents a methodology for learning a control policy to intercept an intruder using the 3D direction unit vector to the intruder and the interceptor state. Prior deep reinforcement learning approaches assume either relative position or distance to the intruder is available, but this information is not readily accessible in real-world applications that employ passive, monocular camera sensors. Instead, we propose a solution that leverages an analytical policy gradient method using differentiable quadrotor dynamics to learn agile interception at speeds up to 10 m/s. The proposed approach outperforms baseline methods that utilize simplified point mass dynamics by an average of 30%.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes learning a quadrotor control policy for agile intruder interception at up to 10 m/s using only the 3D direction unit vector to the intruder plus interceptor state as observations. It employs differentiable quadrotor dynamics and analytical policy gradients, claiming this enables practical use with passive monocular cameras (unlike prior methods needing relative position or distance) and yields an average 30% outperformance over point-mass dynamics baselines.
Significance. If validated, the result would be significant for vision-based interception in robotics, as monocular direction-only sensing is more deployable than range-equipped systems. The differentiable-dynamics + analytical-gradient approach is a methodological strength that could generalize to other agile control tasks.
major comments (2)
- [Methods / observation model] Observation model (Methods/§3): the input consists solely of the 3D unit direction vector plus interceptor state. This supplies bearing but no explicit range or relative position. At the claimed speeds of 10 m/s, small errors in inferred distance produce large timing errors for interception. The manuscript must demonstrate either that temporal derivatives of the unit vector suffice to recover range or that the learned policy is robust to range ambiguity; absent such evidence, every baseline comparison inherits the same untested assumption and the 30% performance claim cannot be assessed.
- [Results] Experimental validation (Results): the abstract and manuscript provide no details on experimental setup, baseline implementations, statistical significance testing, number of trials, or validation against real (non-simulated) dynamics. Without these, the central empirical claim of 30% average outperformance cannot be evaluated for soundness.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive suggestions. We address the major comments point by point below, providing clarifications and indicating where revisions will be made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Methods / observation model] Observation model (Methods/§3): the input consists solely of the 3D unit direction vector plus interceptor state. This supplies bearing but no explicit range or relative position. At the claimed speeds of 10 m/s, small errors in inferred distance produce large timing errors for interception. The manuscript must demonstrate either that temporal derivatives of the unit vector suffice to recover range or that the learned policy is robust to range ambiguity; absent such evidence, every baseline comparison inherits the same untested assumption and the 30% performance claim cannot be assessed.
Authors: Our method is designed precisely for scenarios where only direction information is available from monocular cameras. The analytical policy gradient with differentiable dynamics enables the policy to learn interception strategies that implicitly account for range through the dynamics and the history of observations. To directly address the concern, we will include additional experiments in the revision that test the policy under varying range conditions and analyze the use of bearing rate for range inference. This will also apply to the baselines to ensure fair comparison. revision: yes
-
Referee: [Results] Experimental validation (Results): the abstract and manuscript provide no details on experimental setup, baseline implementations, statistical significance testing, number of trials, or validation against real (non-simulated) dynamics. Without these, the central empirical claim of 30% average outperformance cannot be evaluated for soundness.
Authors: The full manuscript does contain details on the simulation setup, including 5000 episodes for training and 1000 evaluation trials per method with different random seeds. Baselines are implemented with identical observation spaces but point-mass dynamics. We will add a dedicated paragraph in the Results section detailing these, along with p-values from statistical tests. However, as this is a simulation study focused on the learning method, we do not have real hardware experiments. revision: partial
- Validation against real (non-simulated) dynamics, as the presented work is entirely simulation-based.
Circularity Check
No circularity in derivation; empirical learning result stands on its own
full rationale
The paper describes a reinforcement learning method that trains a policy on 3D direction unit vector observations plus interceptor state, using differentiable quadrotor dynamics for the policy gradient. The 30% outperformance claim is presented as an empirical comparison against point-mass baselines. No equations or steps reduce a claimed prediction or uniqueness result to a fitted parameter or self-citation by construction. The derivation chain is self-contained against external simulation benchmarks and does not invoke any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Differentiable quadrotor dynamics model is accurate enough to support policy learning via analytical gradients
- domain assumption Direction unit vector plus interceptor state is informationally sufficient for interception
Reference graph
Works this paper leans on
-
[1]
A. N. Skraparlis, K. S. Ntalianis, and N. Tsapatsoulis. A novel framework to intercept gps- denied, bomb-carrying, non-military, kamikaze drones: Towards protecting critical infras- tructures.Defence Technology, 40:225–241, 2024. ISSN 2214-9147. doi:https://doi.org/ 10.1016/j.dt.2024.05.001. URLhttps://www.sciencedirect.com/science/article/ pii/S2214914724001089
- [2]
-
[3]
A. S. Roncero, Y . Cai, O. Andersson, and P. Ogren. Learned controllers for agile quadrotors in pursuit-evasion games. 2026. URLhttps://arxiv.org/abs/2506.02849
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[4]
Non-Equilibrium MAV-Capture-MAV via Time-Optimal Planning and Reinforcement Learning
C. Zheng, Z. Guo, Z. Yin, C. Wang, Z. Wang, and S. Zhao. Non-equilibrium mav-capture-mav via time-optimal planning and reinforcement learning, 2026. URLhttps://arxiv.org/ abs/2503.06578
work page internal anchor Pith review Pith/arXiv arXiv 2026
- [5]
-
[6]
Logiewa, F
R. Logiewa, F. Hoffmann, F. Govaers, and W. Koch. Dynamic pursuit-evasion scenarios with a varying number of pursuers using deep sets. In2023 IEEE Symposium Sensor Data Fusion and International Conference on Multisensor Fusion and Integration (SDF-MFI), pages 1–7,
-
[7]
doi:10.1109/SDF-MFI59545.2023.10361514
-
[8]
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi. You only look once: Unified, real- time object detection. In2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 779–788, 2016. doi:10.1109/CVPR.2016.91
-
[9]
M. Pliska, M. Vrba, T. B´aˇca, and M. Saska. Towards safe mid-air drone interception: Strategies for tracking and capture.IEEE Robotics and Automation Letters, 9(10):8810–8817, 2024. doi: 10.1109/LRA.2024.3451768
-
[10]
M. Vrba, V . Walter, V . Pritzl, M. Pliska, T. B´aˇca, V . Spurn´y, D. Heˇrt, and M. Saska. On onboard lidar-based flying object detection.IEEE Transactions on Robotics, 41:593–611, 2025. doi: 10.1109/TRO.2024.3502494
-
[11]
J. Ryde and N. Hillier. Performance of laser and radar ranging devices in adverse environmen- tal conditions.Journal of Field Robotics, 26(9):712–727, 2009. doi:https://doi.org/10.1002/ rob.20310. URLhttps://onlinelibrary.wiley.com/doi/abs/10.1002/rob.20310
-
[12]
M. Zygmunt and K. Kopczynski. Laser warning system as an element of optoelectronic bat- tlefield surveillance. In P. Kaniewski and J. Matuszewski, editors,Radioelectronic Systems Conference 2019, volume 11442, page 1144202. International Society for Optics and Photon- ics, SPIE, 2020. doi:10.1117/12.2565139. URLhttps://doi.org/10.1117/12.2565139
-
[13]
H. Yan, K. Yang, Y . Cheng, Z. Wang, and D. Li. Precise interception flight targets by image- based visual servoing of multicopter.IEEE Transactions on Industrial Electronics, 72(11): 11499–11509, 2025. doi:10.1109/TIE.2025.3559951
-
[14]
H. Guo, T. Song, and J. Ye. Dynamic interception image-based visual servoing under gust interference and model uncertainty. In P. of Acta Aero et Astro Sinica, editor,Proceedings of the 2nd Aerospace Frontiers Conference (AFC 2025), pages 410–420, Singapore, 2026. Springer Nature Singapore. ISBN 978-981-95-3037-3. doi:10.1007/978-981-95-3037-3 28. 9
-
[15]
F. Liu, S. Yuan, T.-M. Nguyen, and R. Su. Autonomous 3d moving target encirclement and interception with range measurement. In2025 IEEE/RSJ International Conference on Intel- ligent Robots and Systems (IROS), pages 4581–4588, 2025. doi:10.1109/IROS60139.2025. 11246819
-
[16]
N. Souli, P. Kolios, and G. Ellinas. Multi-agent system for rogue drone interception.IEEE Robotics and Automation Letters, 8(4):2221–2228, 2023. doi:10.1109/LRA.2023.3245412
-
[17]
P. Valianti, K. Malialis, P. Kolios, and G. Ellinas. Cooperative multi-agent jamming of multiple rogue drones using reinforcement learning.IEEE Transactions on Mobile Computing, 23(12): 12345–12359, 2024. doi:10.1109/TMC.2024.3409050
-
[18]
X. Ma and M. Gao. “lure the enemy in deep”: Confronting rogue uav through diverse hybrid jamming.IEEE Access, 13:68351–68369, 2025. doi:10.1109/ACCESS.2025.3559659
-
[19]
Souli, P
N. Souli, P. Kolios, and G. Ellinas. An enhanced autonomous counter-drone system with jamming and relative positioning capabilities.Robotics and Autonomous Systems, 194:105160,
-
[20]
doi:https://doi.org/10.1016/j.robot.2025.105160
ISSN 0921-8890. doi:https://doi.org/10.1016/j.robot.2025.105160. URLhttps:// www.sciencedirect.com/science/article/pii/S092188902500257X
-
[21]
J. Rothe, M. Strohmeier, and S. Montenegro. Autonomous multi-uav net defense system for aerial drone interception. In2025 10th International Conference on Control and Robotics Engineering (ICCRE), pages 171–177, 2025. doi:10.1109/ICCRE65455.2025.11093305
-
[22]
Y . Zhang, Y . Hu, Y . Song, D. Zou, and W. Lin. Learning vision-based agile flight via differ- entiable physics.Nature Machine Intelligence, 7(6):954–966, 2025. ISSN 2522-5839. doi:10. 1038/s42256-025-01048-0. URLhttp://dx.doi.org/10.1038/s42256-025-01048-0
-
[23]
J. Lee, A. Rathod, K. Goel, J. Stecklein, and W. Tabib. Quadrotor navigation using reinforce- ment learning with privileged information, 2025. URLhttps://arxiv.org/abs/2509. 08177
2025
-
[24]
F. Li, S. Wang, Y . Huang, F. Sun, S. Wu, Y . Yan, D. Zou, and W. Yu. Simple but stable, fast and safe: Achieve end-to-end control by high-fidelity differentiable simulation. 2026. URL https://arxiv.org/abs/2604.10548
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[25]
A. Loquercio, E. Kaufmann, R. Ranftl, M. M ¨uller, V . Koltun, and D. Scaramuzza. Learning high-speed flight in the wild.Science Robotics, 6(59):eabg5810, 2021. doi:10.1126/scirobotics.abg5810. URLhttps://www.science.org/doi/abs/10.1126/ scirobotics.abg5810
-
[26]
D. Mellinger, N. Michael, and V . Kumar. Trajectory generation and control for precise ag- gressive maneuvers with quadrotors.The International Journal of Robotics Research, 31 (5):664–674, 2012. doi:10.1177/0278364911434236. URLhttps://doi.org/10.1177/ 0278364911434236
-
[27]
N. Wiedemann, V . W¨uest, A. Loquercio, M. M ¨uller, D. Floreano, and D. Scaramuzza. Train- ing efficient controllers via analytic policy gradient, 2023. URLhttps://arxiv.org/abs/ 2209.13052
-
[28]
L. C. Yuan. Homing and navigational courses of automatic target-seeking devices.Journal of Applied Physics, 19(12):1122–1128, 12 1948. ISSN 0021-8979. doi:10.1063/1.1715028. URLhttps://doi.org/10.1063/1.1715028
-
[29]
Paszke, S
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K ¨opf, E. Yang, Z. DeVito, M. Raison, A. Te- jani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala. Pytorch: An imperative style, high-performance deep learning library, 2019. URLhttps://arxiv.org/abs/1912. 01703. 10
2019
-
[30]
Proximal Policy Optimization Algorithms
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov. Proximal policy optimization algorithms. 2017. URLhttps://arxiv.org/abs/1707.06347
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[31]
High-Dimensional Continuous Control Using Generalized Advantage Estimation
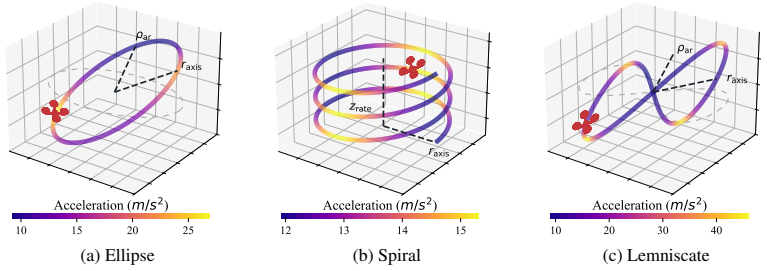
J. Schulman, P. Moritz, S. Levine, M. Jordan, and P. Abbeel. High-dimensional continu- ous control using generalized advantage estimation, 2015. URLhttps://arxiv.org/abs/ 1506.02438. 11 A Appendix A.1 Parametric Intruder Trajectories Table 1: Intruder trajectory families.r axis = semi-axis,ρ ar = axis ratio,z rate = spiral climb per radian. Family In-plan...
work page internal anchor Pith review Pith/arXiv arXiv 2015
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.