A System for Fast, Resilient, and Adaptable Loco-Manipulation Behaviors on Humanoid Robots
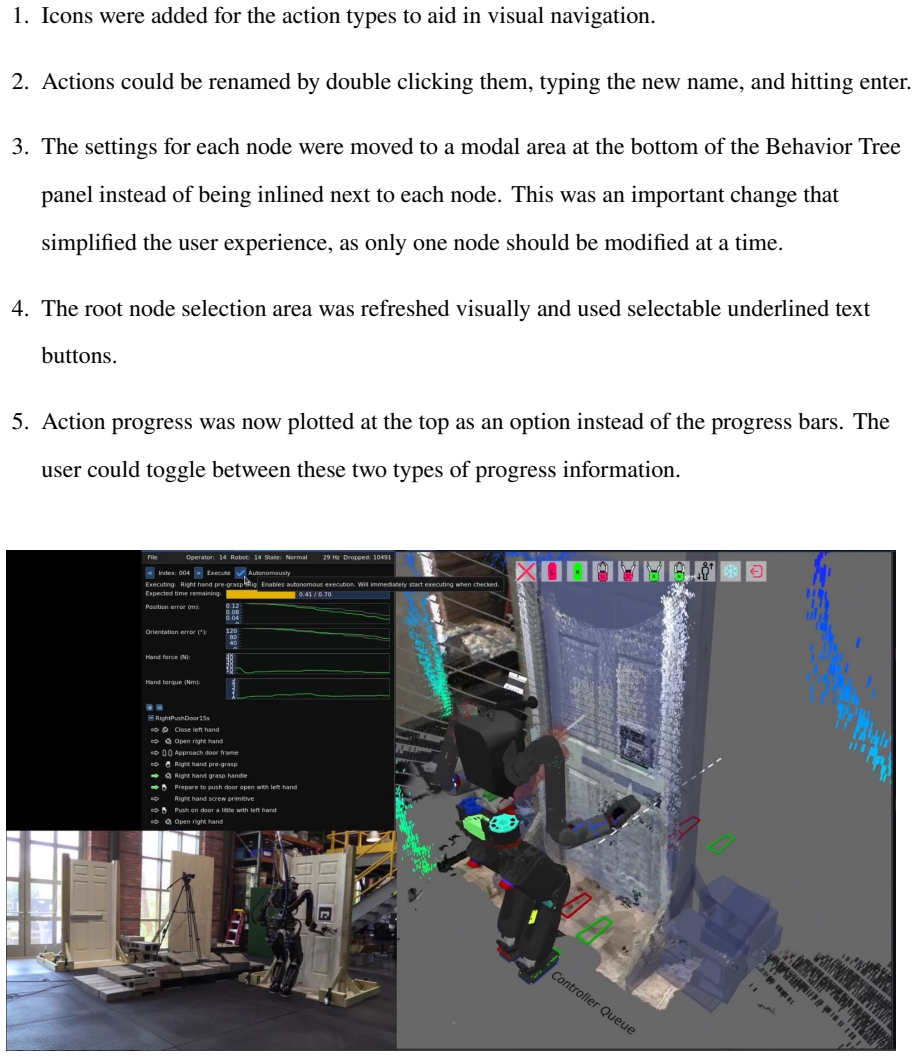
Pith reviewed 2026-06-26 01:13 UTC · model grok-4.3
The pith
A behavior system lets humanoid robots adapt loco-manipulation tasks in minutes or hours.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
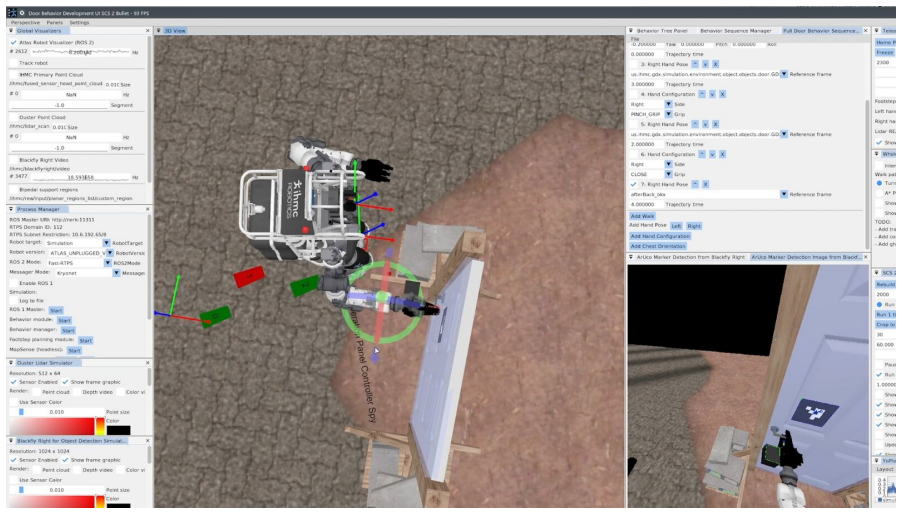
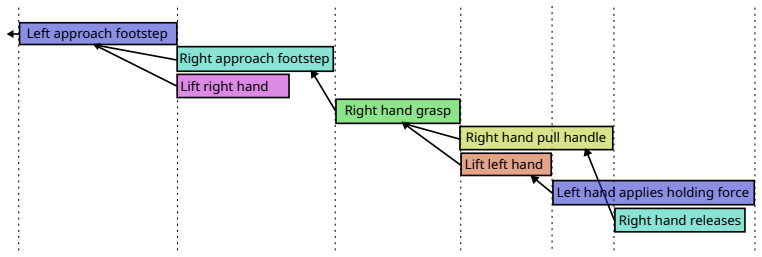
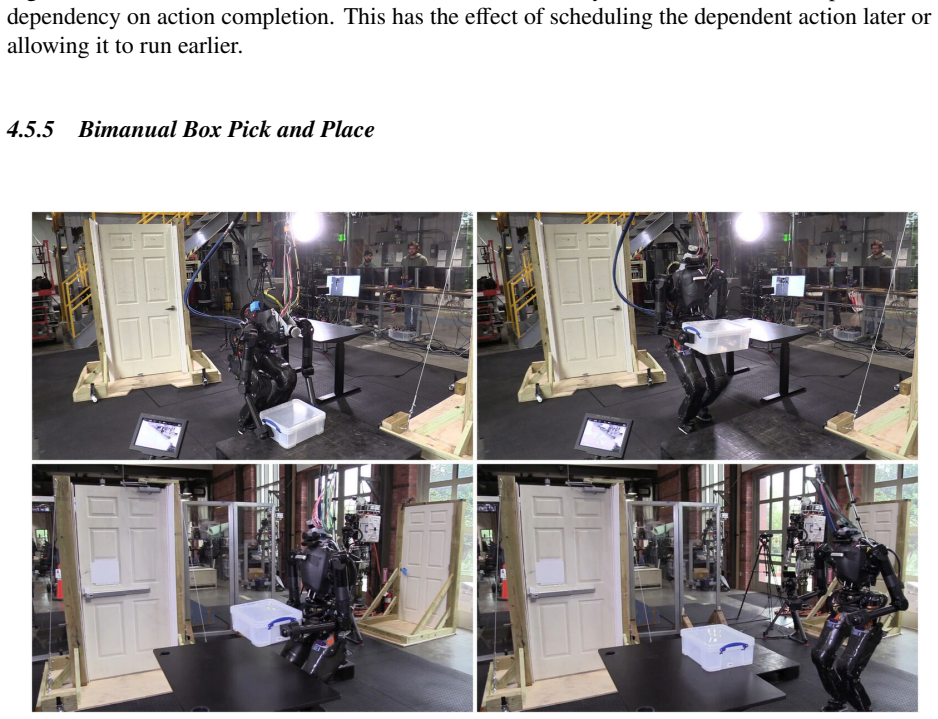
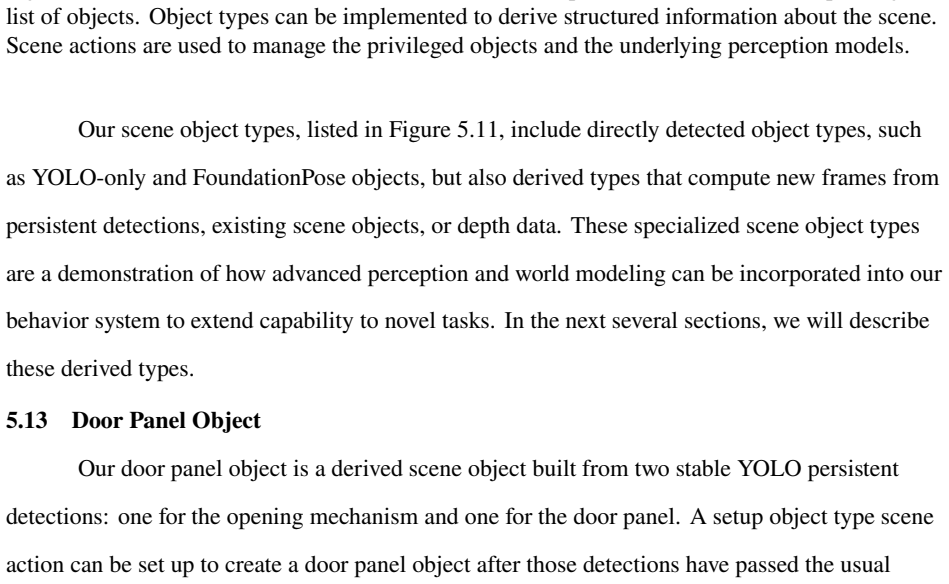
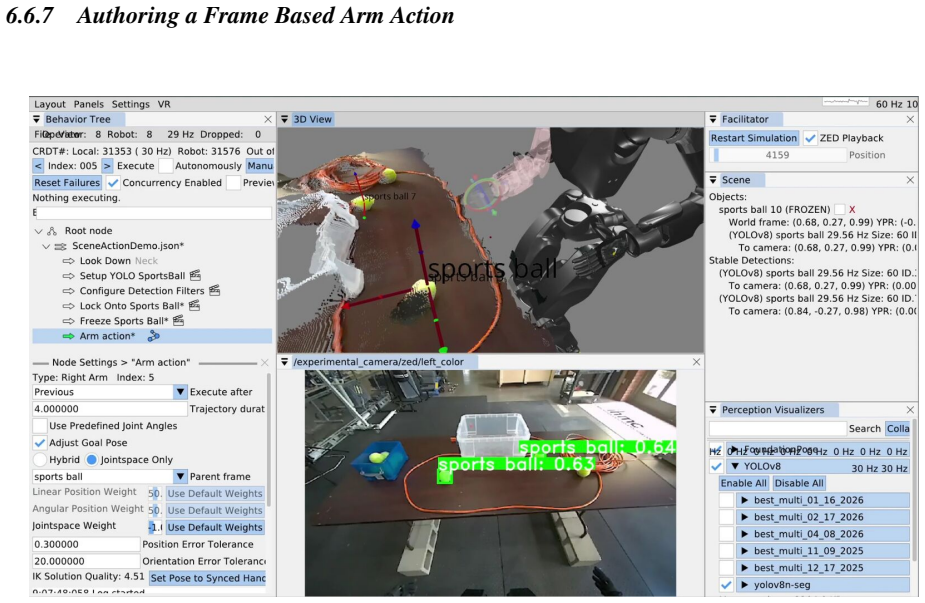
The system combines Affordance Templates for object interaction, Behavior Tree-inspired organization for logic, and runtime-editable perception through a behavior scene and primitive scene actions, all built on a whole-body controller with concurrent action layering, which together support a library of more than twenty real-robot task variants and enable adaptation in minutes or hours.
What carries the argument
Integration of object-centric Affordance Templates with Behavior Tree logic and runtime-editable perception via a behavior scene that supports concurrent action layering on a whole-body controller.
Load-bearing premise
That the specific combination of affordance templates, behavior trees, runtime-editable perception, and concurrent layering is what produces the claimed speed of adaptation and resilience.
What would settle it
A side-by-side test in which adapting or combining a behavior with the system takes days rather than minutes or hours, or yields lower reliability than a baseline method.
Figures





























































read the original abstract
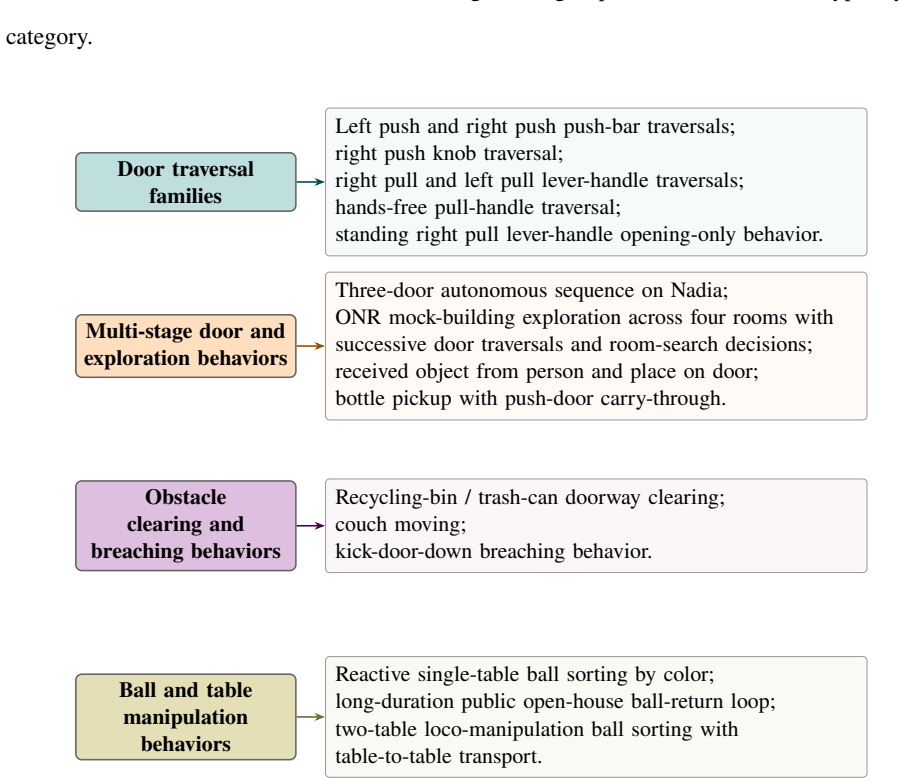
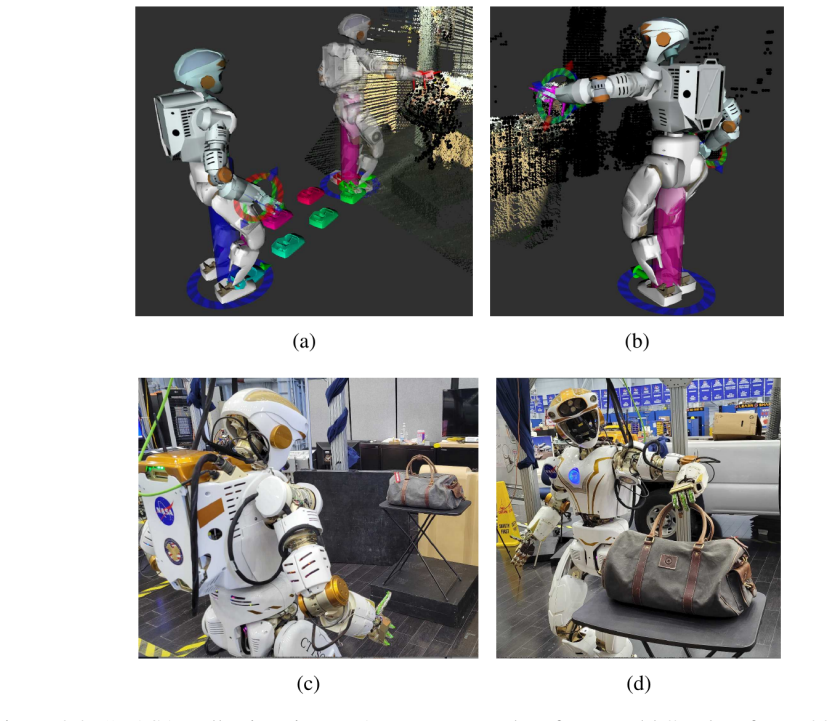
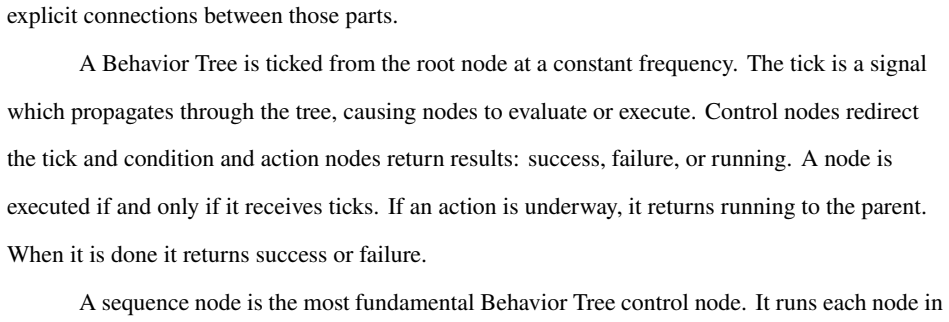
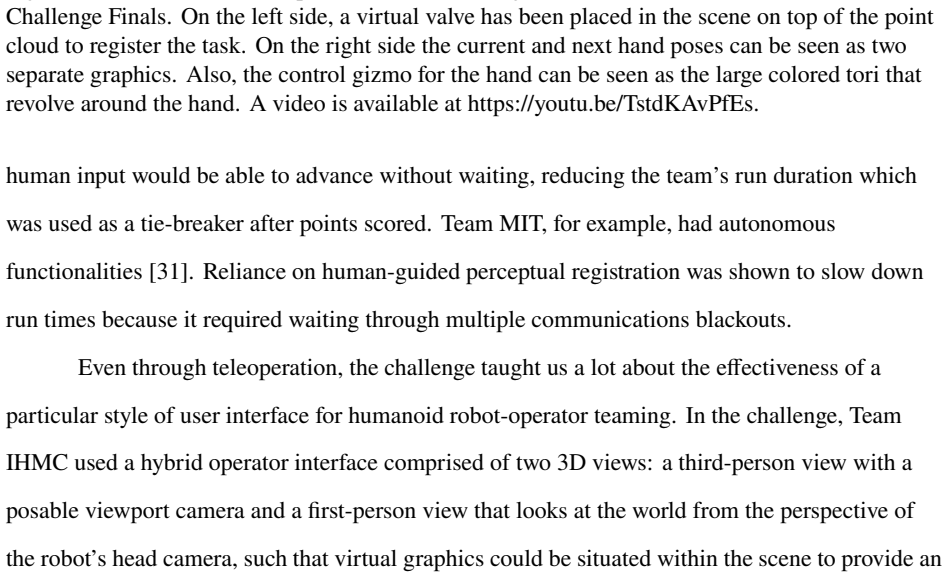
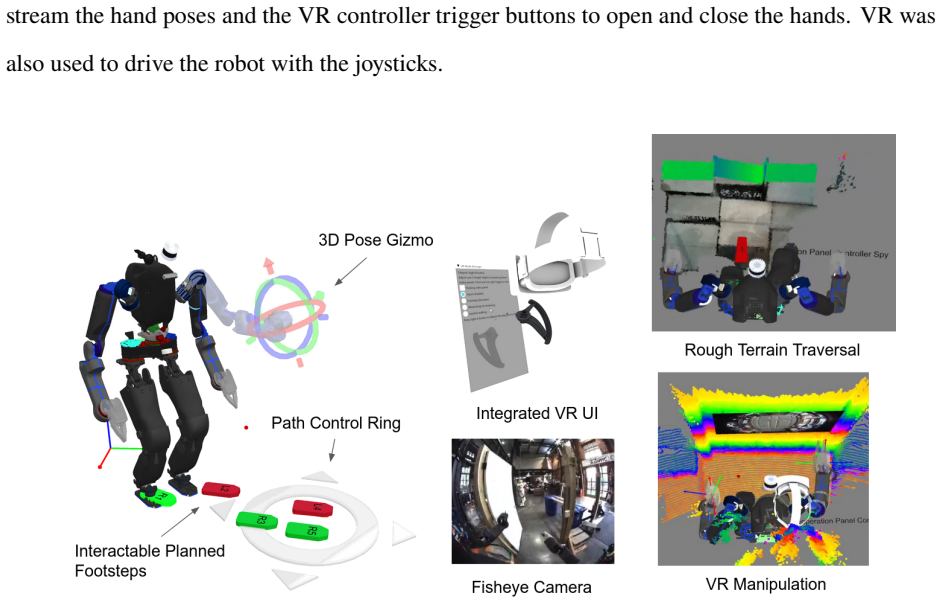
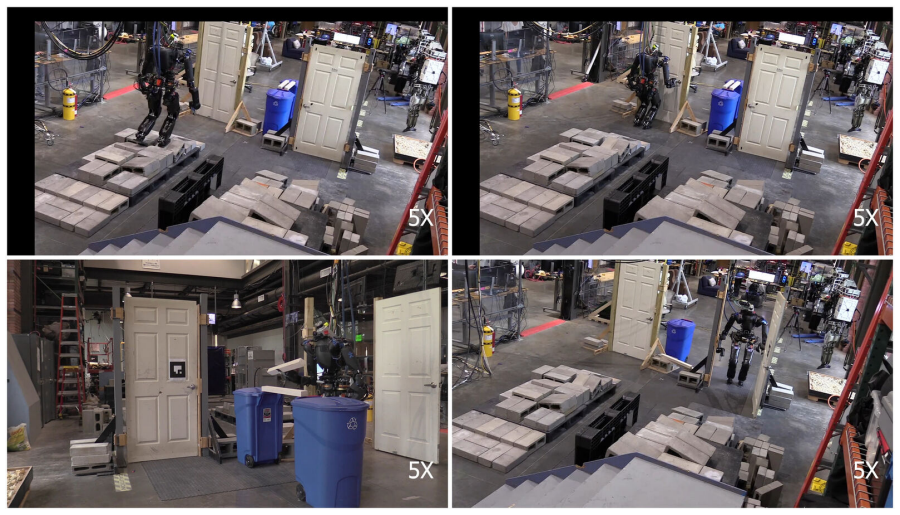
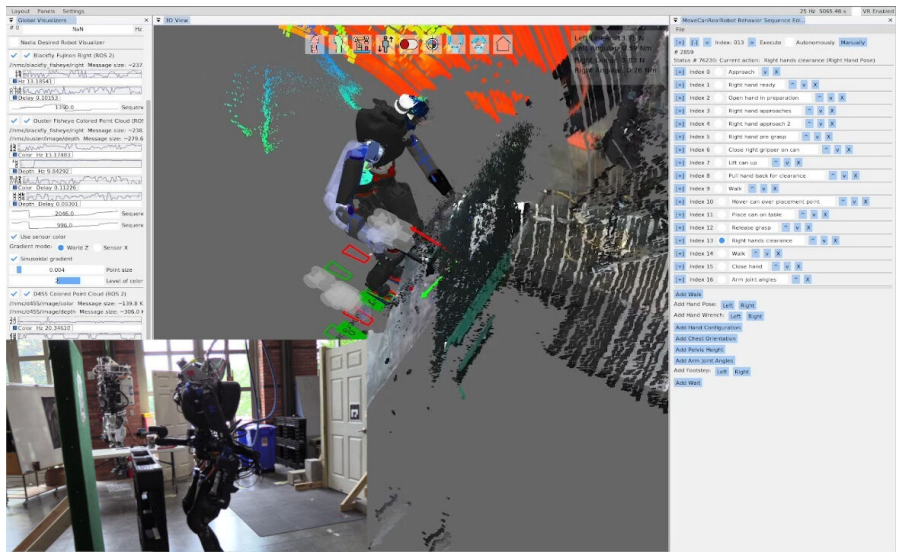
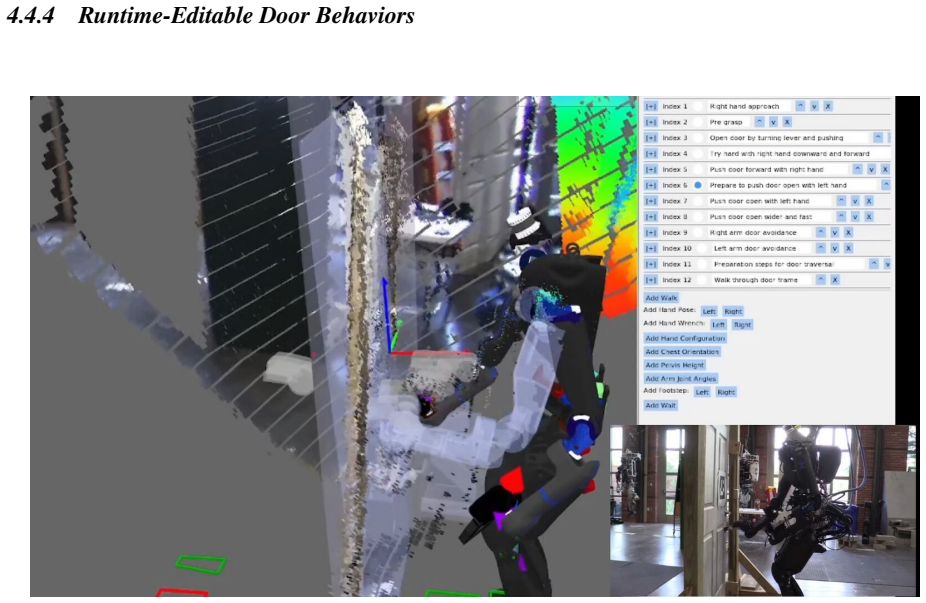
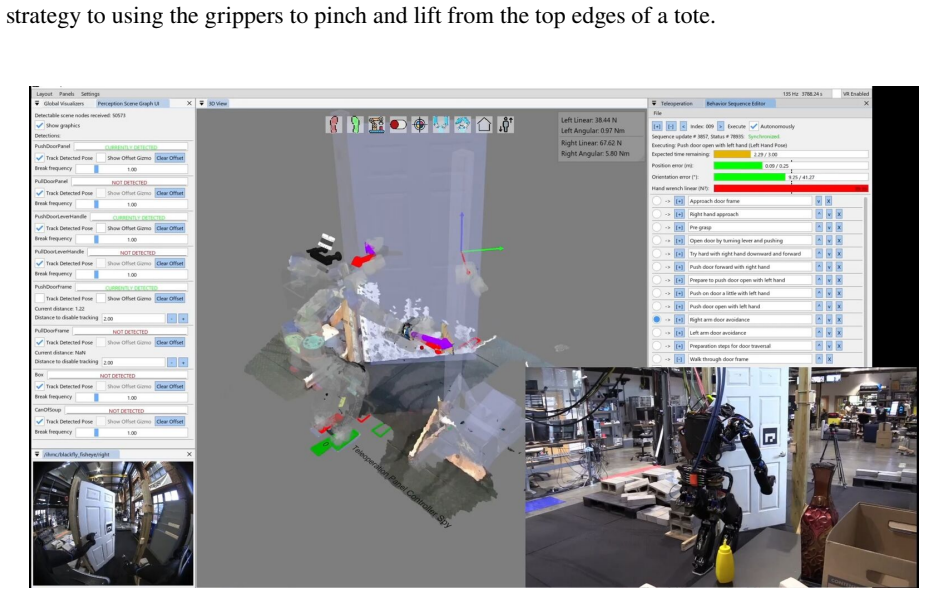
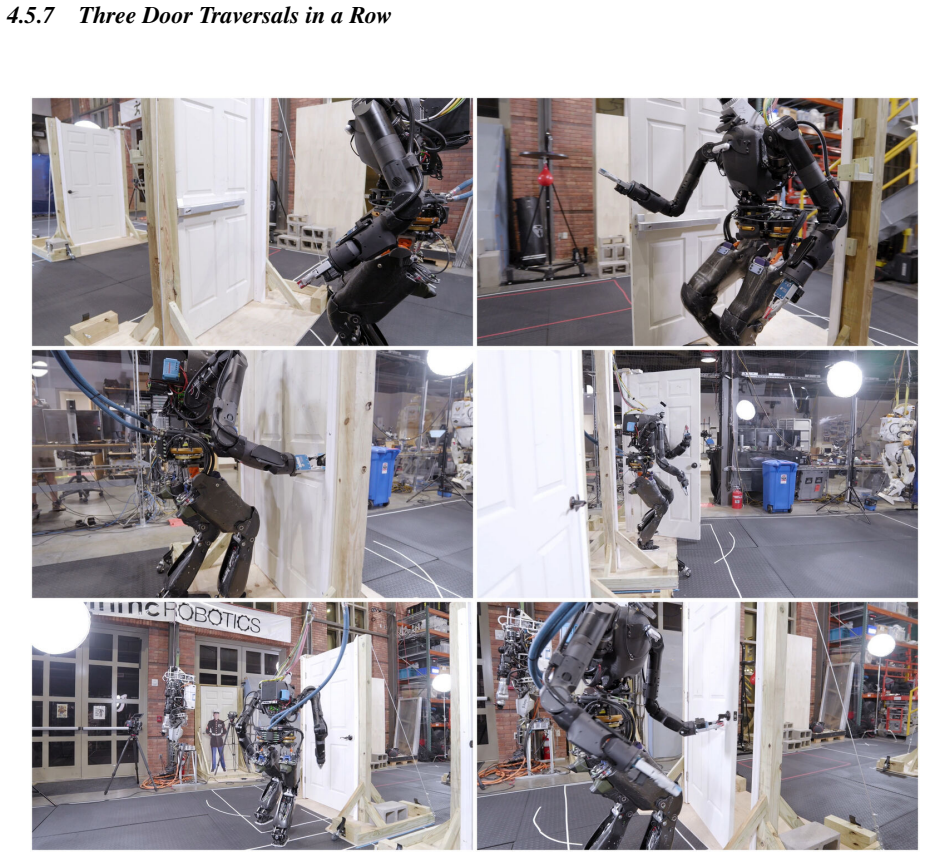
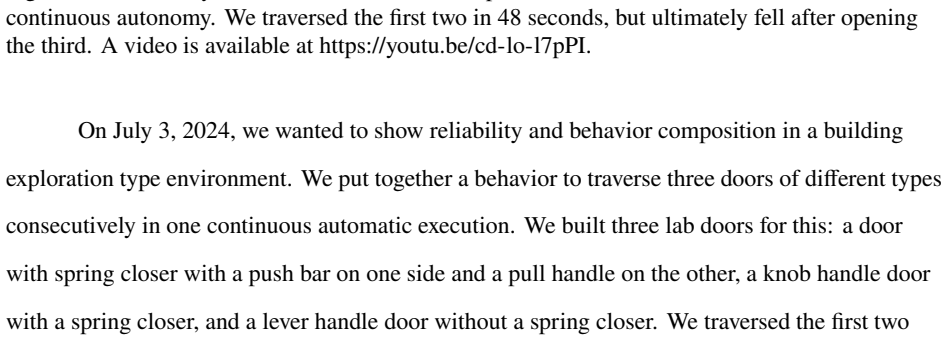
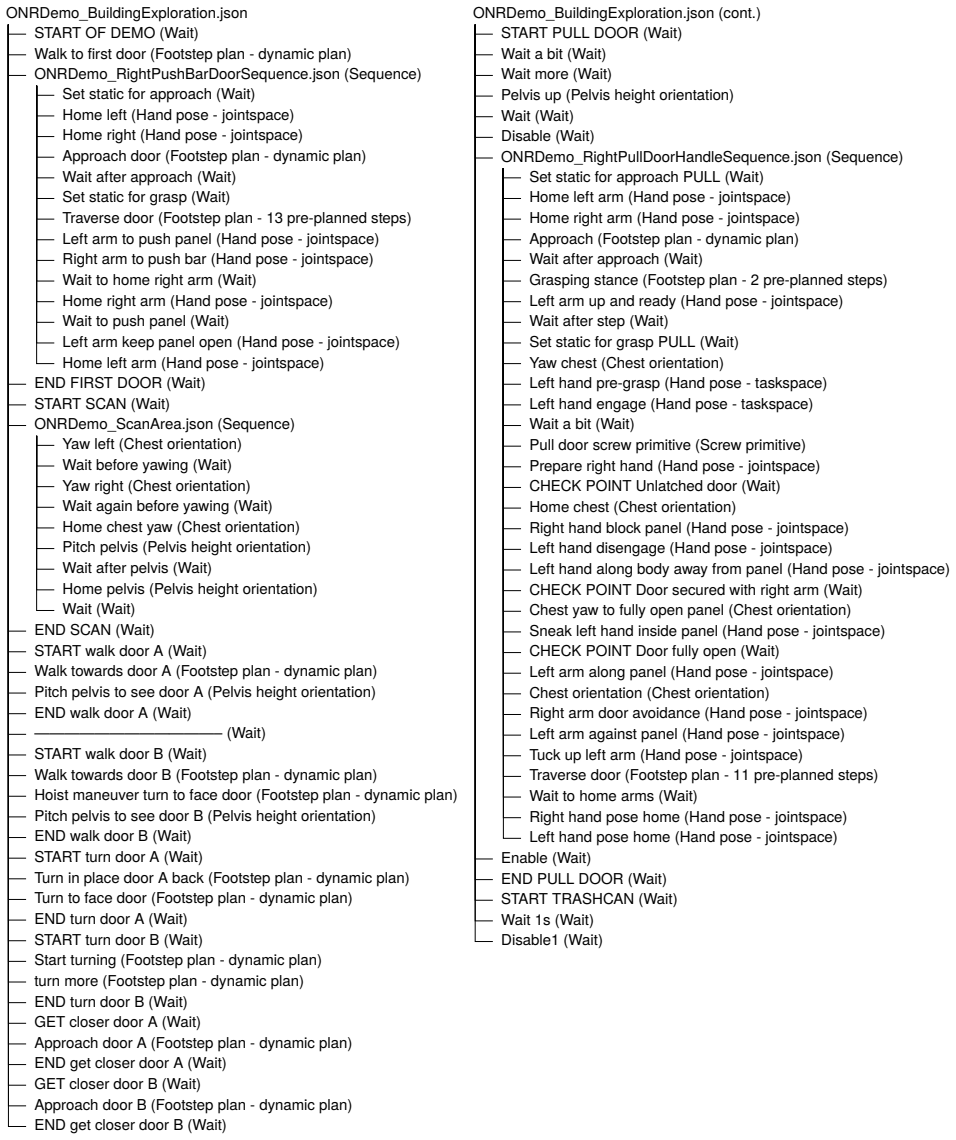
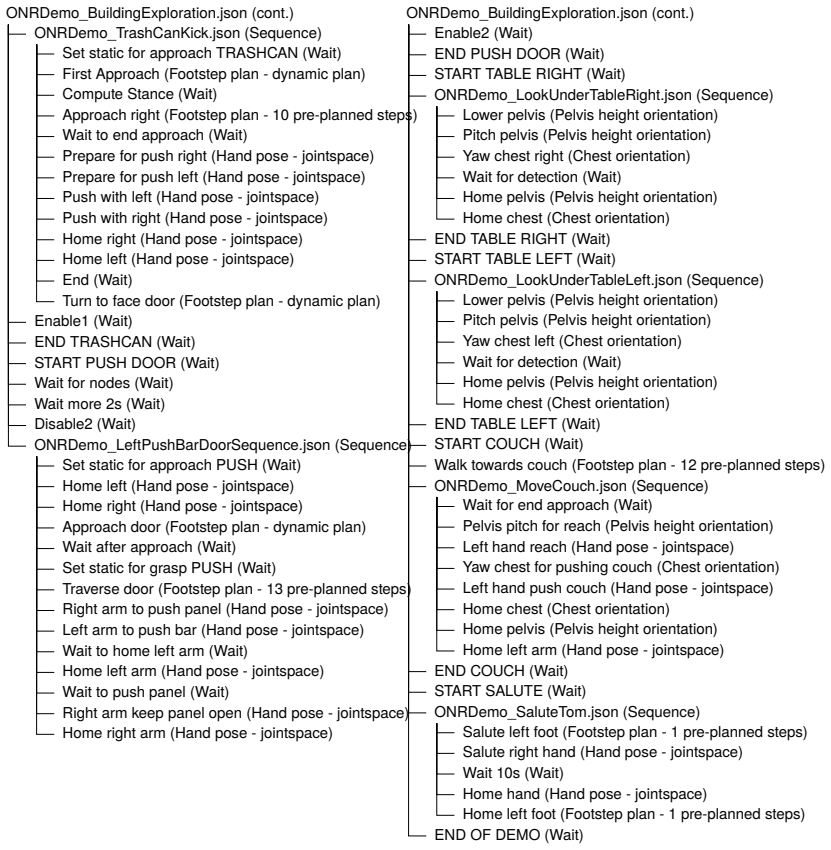
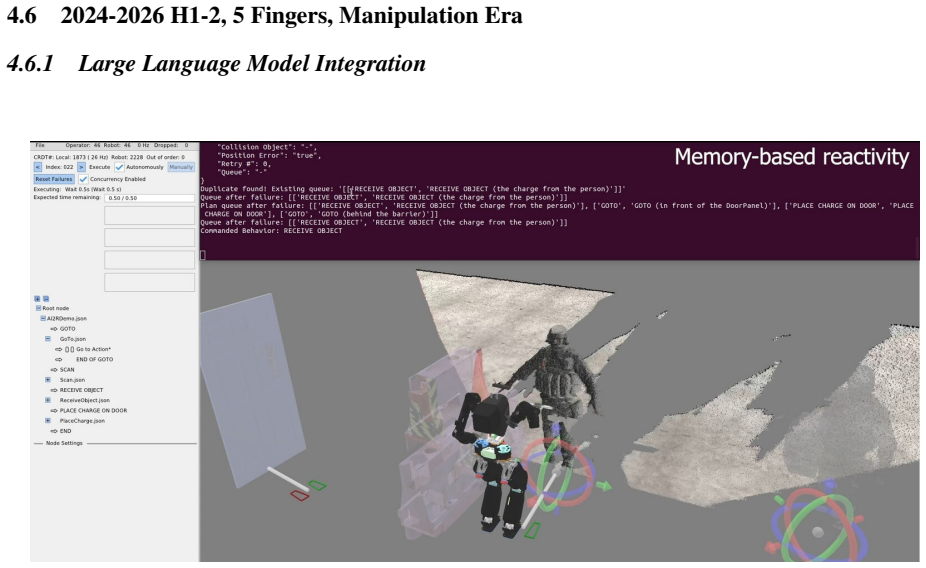
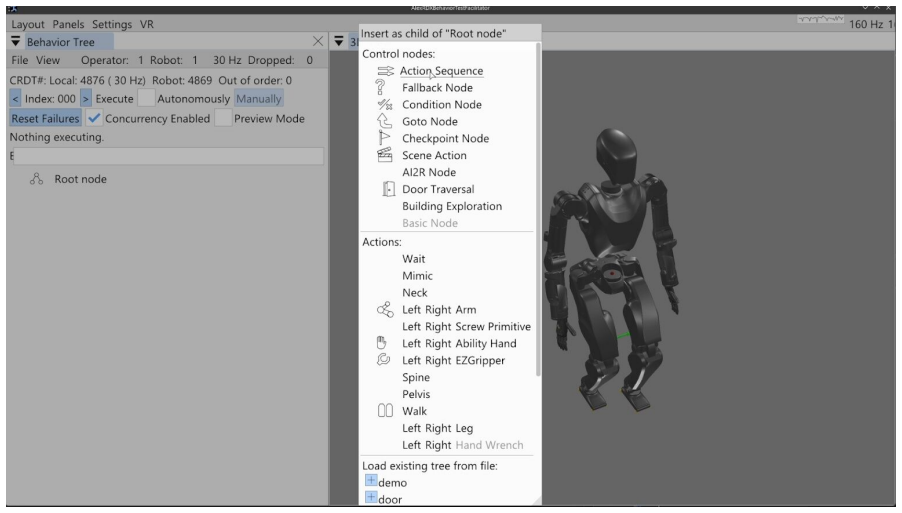
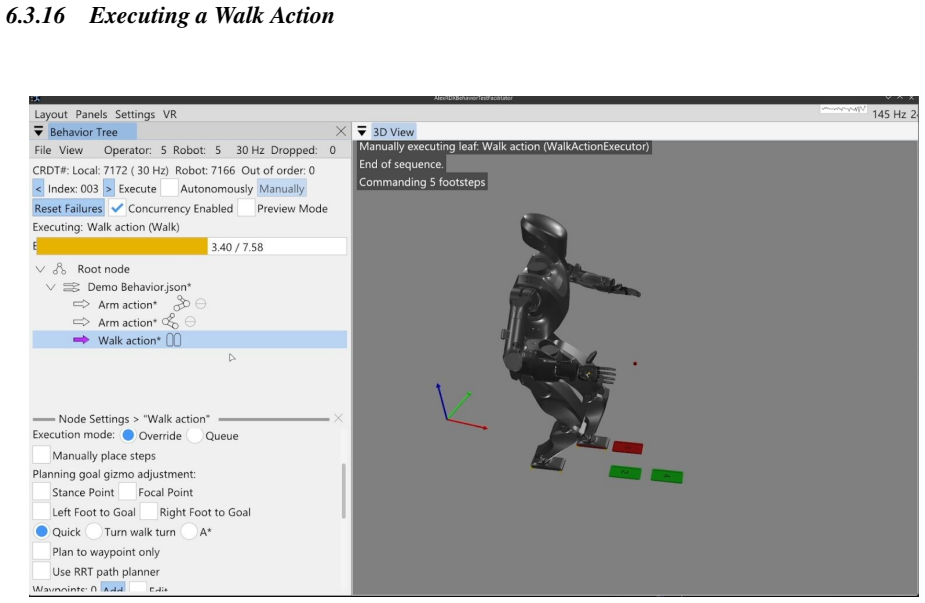
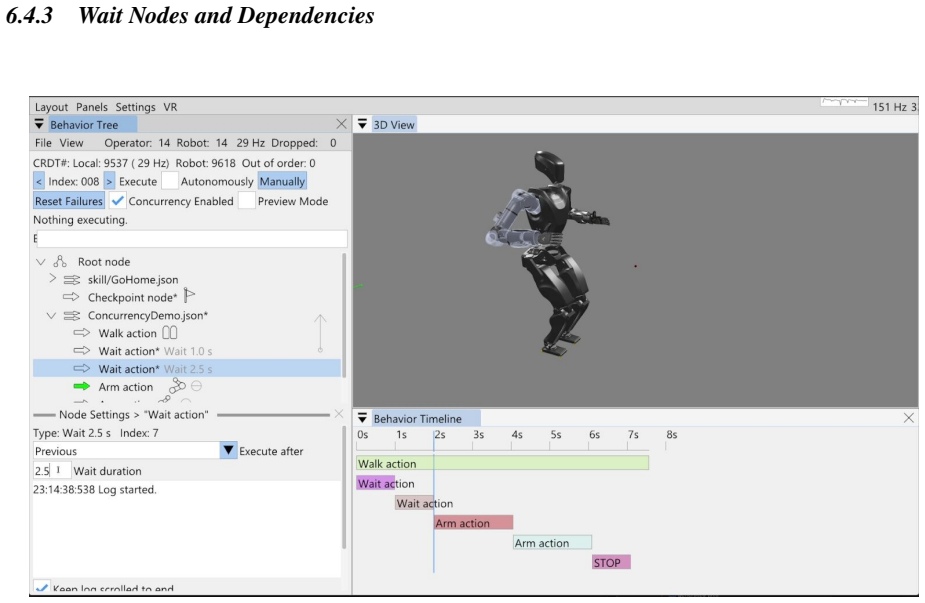
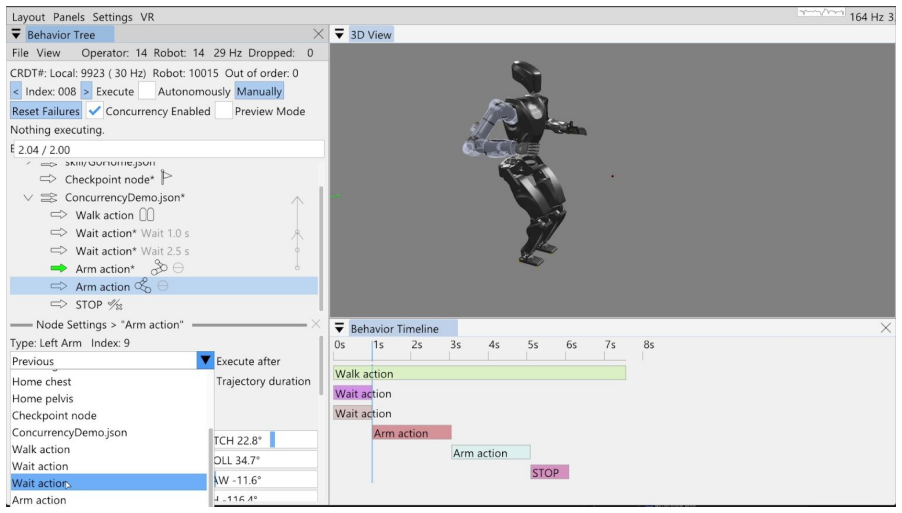
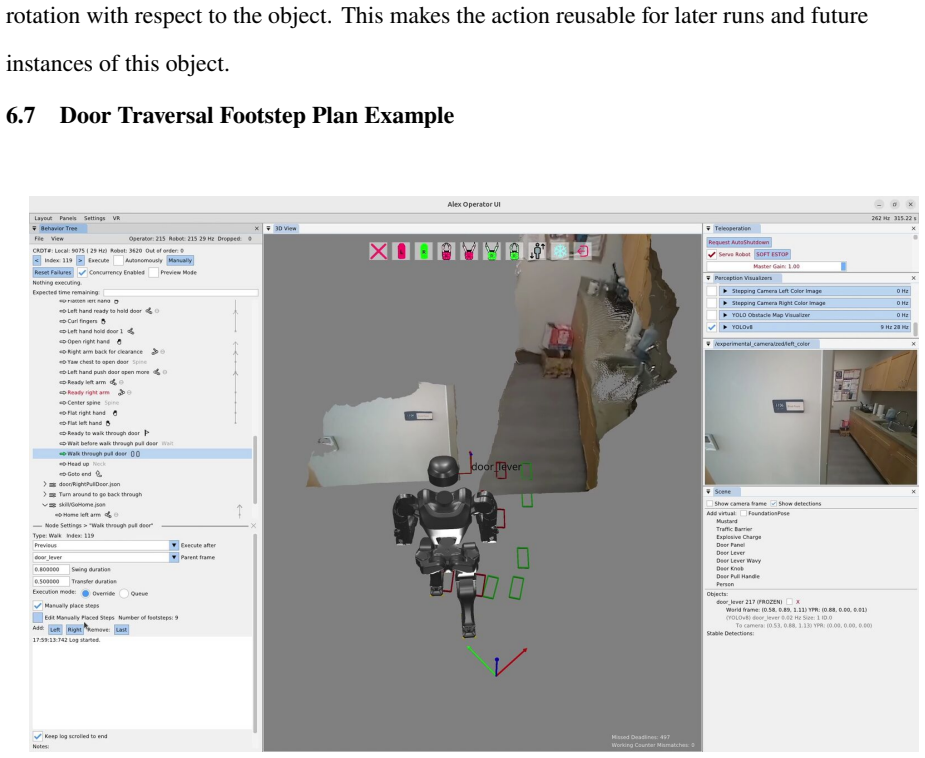
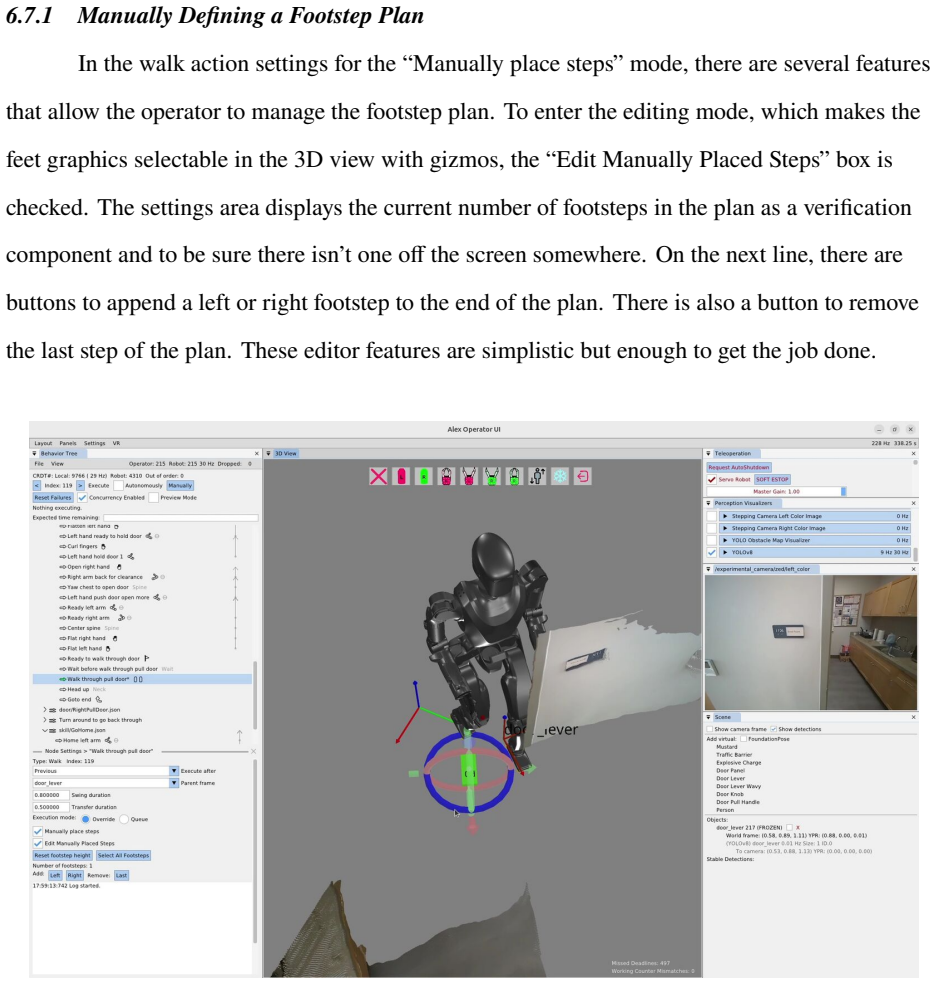
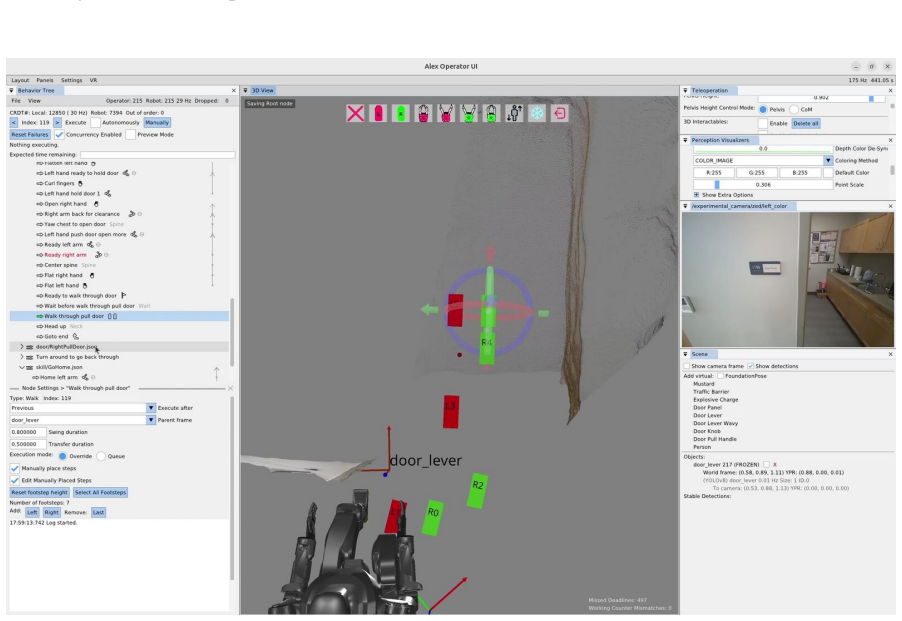
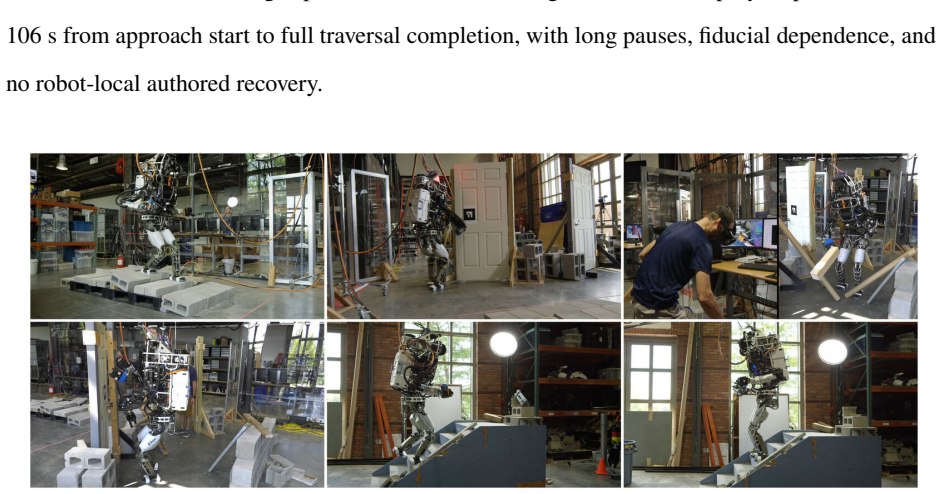
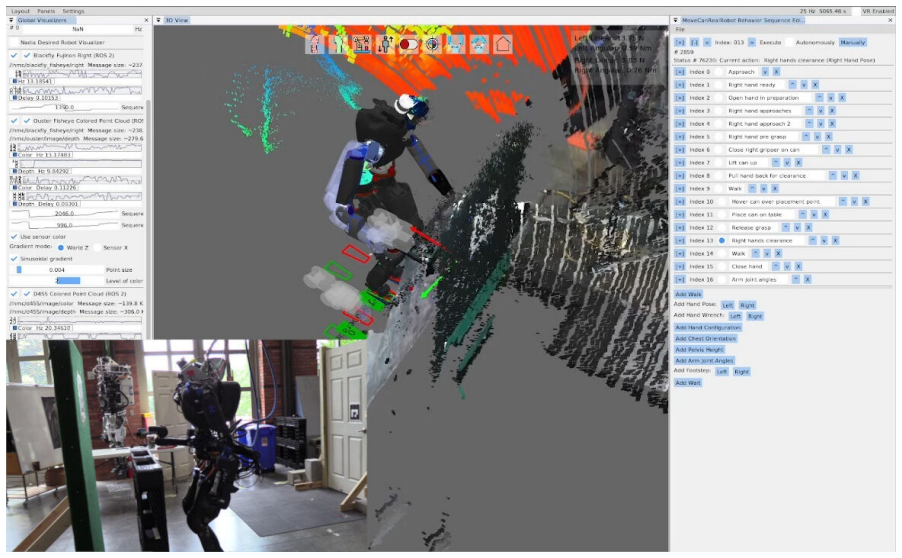
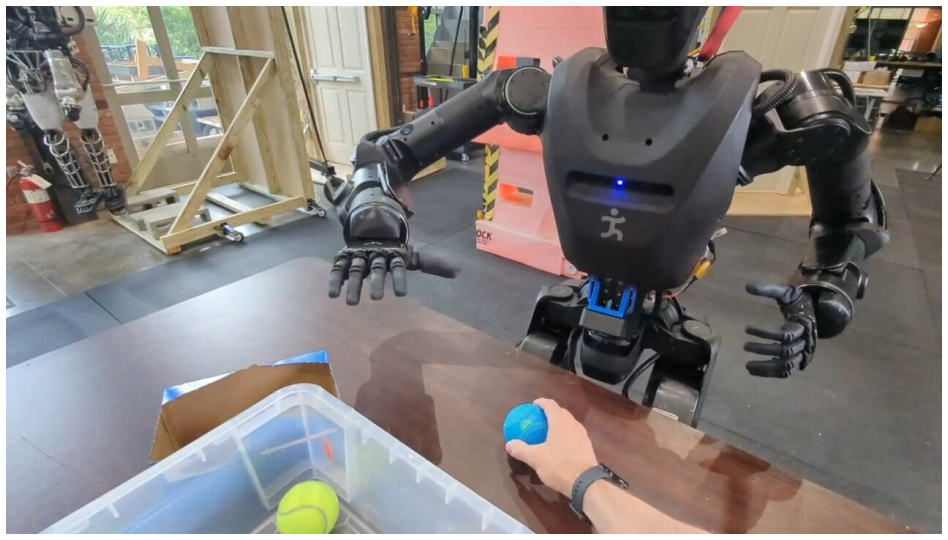
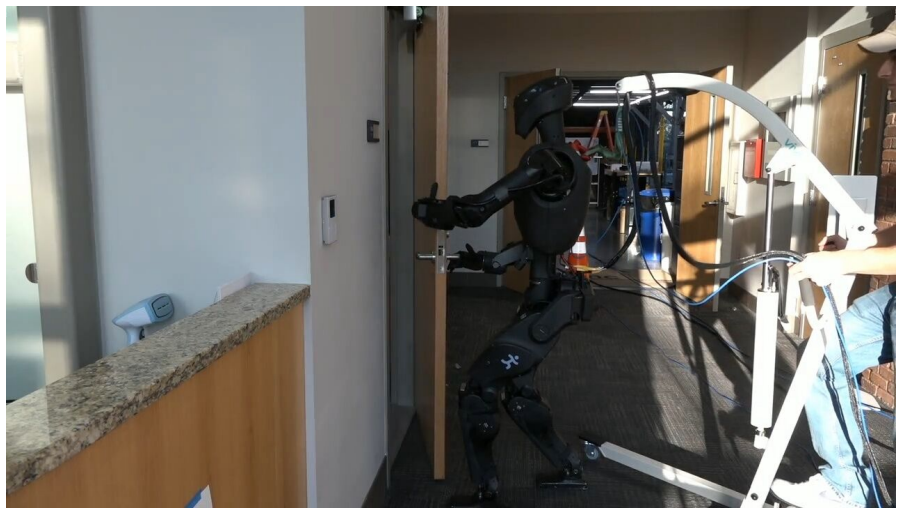
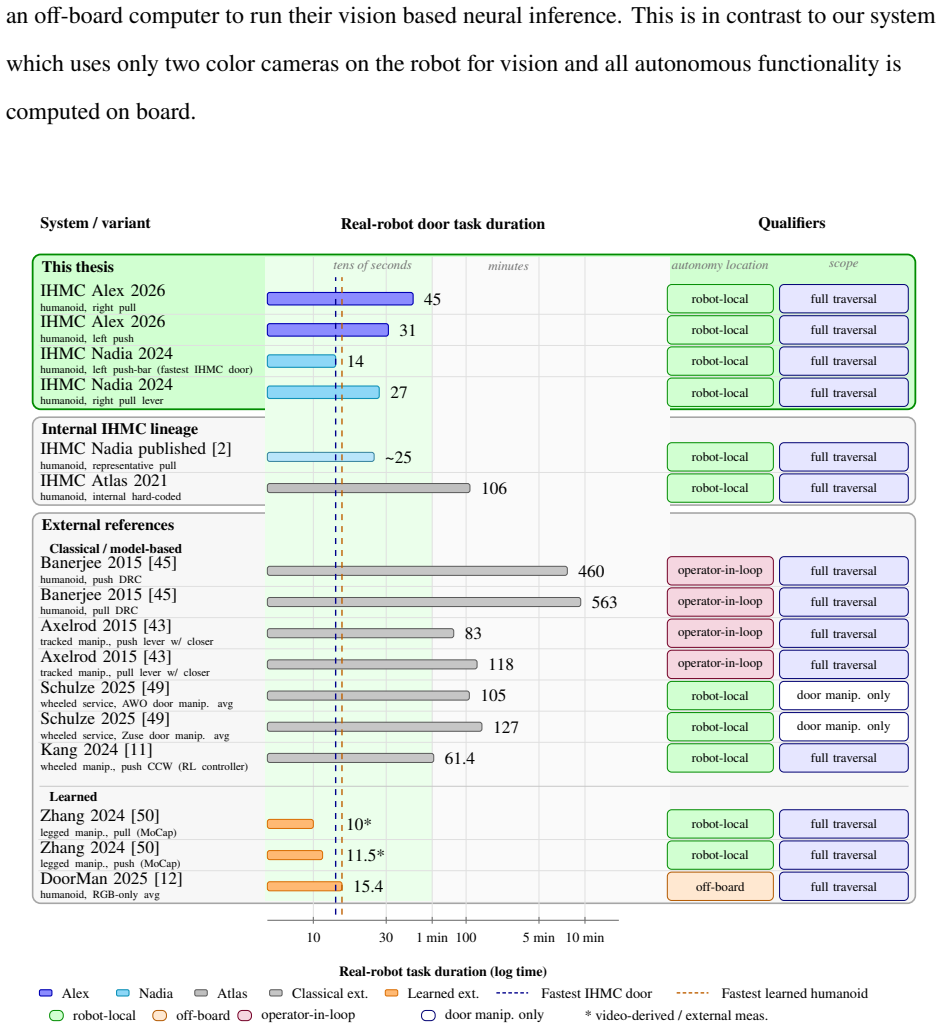
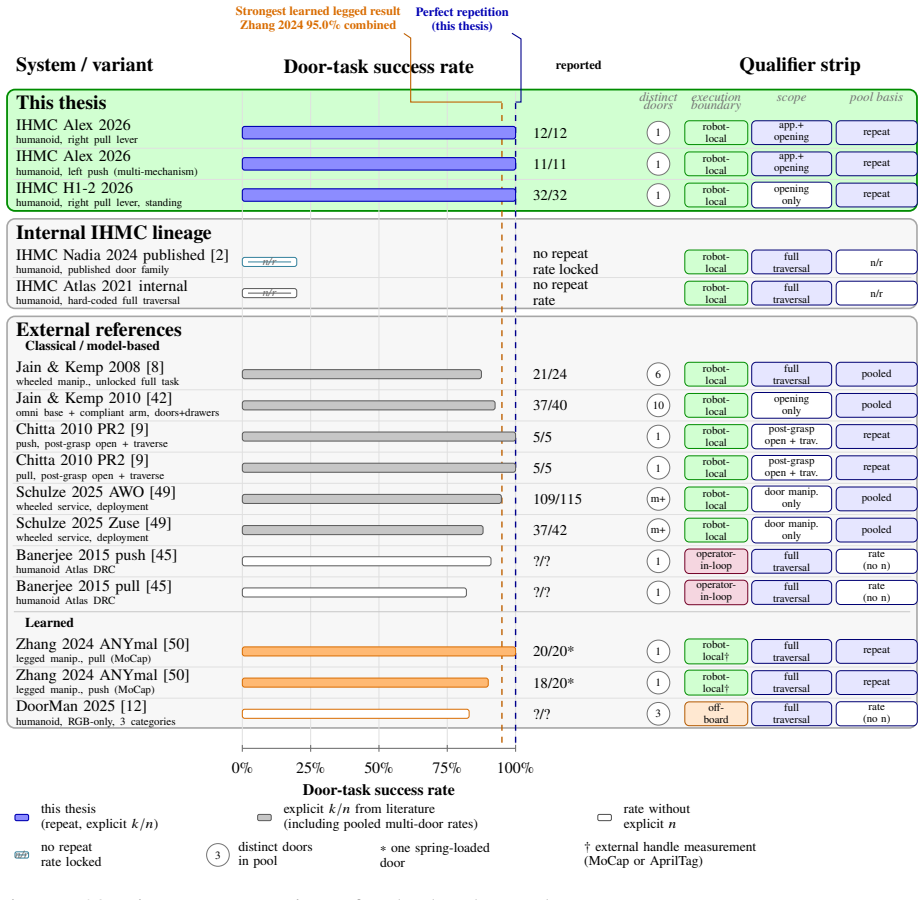
Humanoid robots could take on physically demanding, hazardous, and repetitive work in spaces built for humans. However, a useful robot for these spaces must coordinate locomotion, whole body motion, perception, contact, and operator supervision. This thesis presents a robot-local, runtime-editable behavior authoring and runtime system. Our system strives to be maximally observable, predictable, and directable following Coactive Design principles developed during the DARPA Robotics Challenge. Our operator interface remains continuously synchronized to the robot for runtime authoring, monitoring, and repair. Our behavior architecture uniquely combines object-centric Affordance Templates, organization and logic inspired by Behavior Trees, and runtime-editable perception through a behavior scene and primitive scene actions. Action primitives build on a whole-body controller that supports moving the arms while walking, and use a concurrent action layering algorithm for speed. The behavior library developed during this work covers more than twenty real-robot task variants, including push and pull doors with knob, push-bar, and lever-handle mechanisms, multi-step exploration sequences, obstacle clearing, and reactive table-to-table manipulation tasks. This behavior system has been deployed on many humanoid robots, such as Boston Dynamics' DRC Atlas, NASA's Valkyrie, IHMC and Boardwalk Robotics' Nadia, Unitree's H1-2, and IHMC's Alex. We evaluate our system across capability, speed, reliability, and speed of behavior creation, adaptation, extension, and combination. Our experiments demonstrate that we can adapt, extend, and combine existing behaviors to create novel loco-manipulation behaviors in minutes or hours. Videos: https://www.youtube.com/playlist?list=PLJK5CTyotYqsfgfnXb-09YNFeBose6uEY.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a robot-local, runtime-editable behavior authoring and runtime system for humanoid loco-manipulation that combines object-centric Affordance Templates, Behavior Tree-inspired organization, runtime-editable perception through behavior and primitive scenes, and concurrent action layering atop a whole-body controller supporting arm motion during walking. It describes a library covering more than twenty real-robot task variants (door mechanisms, exploration, obstacle clearing, table-to-table manipulation) deployed on platforms including DRC Atlas, Valkyrie, Nadia, H1-2, and Alex, and evaluates the system on capability, speed, reliability, and speed of behavior creation, adaptation, extension, and combination, claiming that novel behaviors can be created in minutes or hours.
Significance. If supported by quantitative evidence, the work would offer a practical contribution to humanoid deployment by emphasizing coactive design principles for observability and directability, with demonstrated multi-platform applicability and coverage of contact-rich tasks. The explicit integration of perception editing and concurrent layering for speed is a notable architectural choice that could reduce operator burden in real-world settings.
major comments (1)
- [Abstract] Abstract: The central claim that experiments demonstrate adaptation, extension, and combination of behaviors to create novel loco-manipulation tasks 'in minutes or hours' is unsupported by any reported quantitative metrics, such as measured adaptation times for specific tasks, number of evaluated adaptations, operator effort data, statistical comparisons, or baselines against prior authoring methods. This directly affects the soundness of the speed-of-adaptation evaluation.
minor comments (1)
- [Abstract] The manuscript refers to itself as a 'thesis' in the abstract; clarify whether this is a journal article derived from thesis work and ensure all evaluation details are self-contained.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. The single major comment concerns the lack of quantitative metrics supporting the abstract's claim on adaptation speed. We address this directly below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that experiments demonstrate adaptation, extension, and combination of behaviors to create novel loco-manipulation tasks 'in minutes or hours' is unsupported by any reported quantitative metrics, such as measured adaptation times for specific tasks, number of evaluated adaptations, operator effort data, statistical comparisons, or baselines against prior authoring methods. This directly affects the soundness of the speed-of-adaptation evaluation.
Authors: We agree that the abstract's claim would be strengthened by explicit quantitative metrics. The manuscript reports a library of more than twenty real-robot task variants across multiple platforms and states that novel behaviors were created in minutes or hours, but does not include measured times, counts of evaluated adaptations, or comparisons to baselines. We will revise the abstract and add a dedicated subsection with quantitative adaptation data (e.g., recorded times and operator actions for specific extensions) to support the evaluation. revision: yes
Circularity Check
No circularity: descriptive systems paper with no mathematical derivations or self-referential predictions
full rationale
The paper is a systems description of a robot behavior authoring architecture combining Affordance Templates, Behavior Trees, and runtime perception. It reports experimental outcomes on adaptation speed but contains no equations, fitted parameters, uniqueness theorems, or predictions that reduce to prior definitions by construction. The central claim of 'minutes or hours' adaptation is presented as an empirical observation from deployments rather than a derived result from self-cited inputs. No load-bearing self-citations or ansatzes appear in the provided text. This is a normal non-finding for a non-mathematical robotics systems contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Team ihmc’s lessons learned from the darpa robotics challenge: Finding data in the rubble,
M. Johnson et al., “Team ihmc’s lessons learned from the darpa robotics challenge: Finding data in the rubble,”Journal of Field Robotics, vol. 34, no. 2, pp. 241–261, 2017
2017
-
[2]
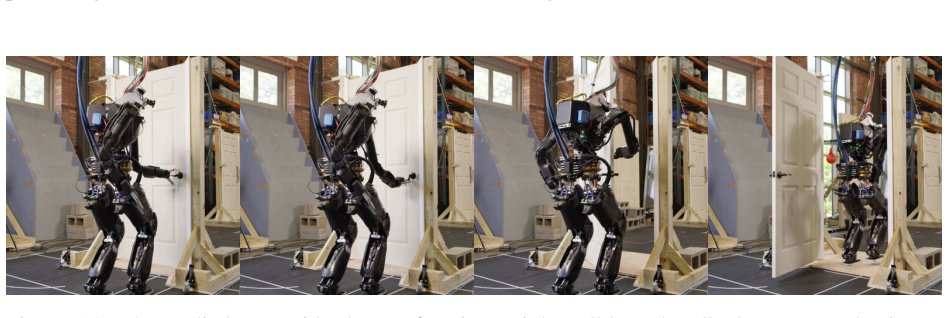
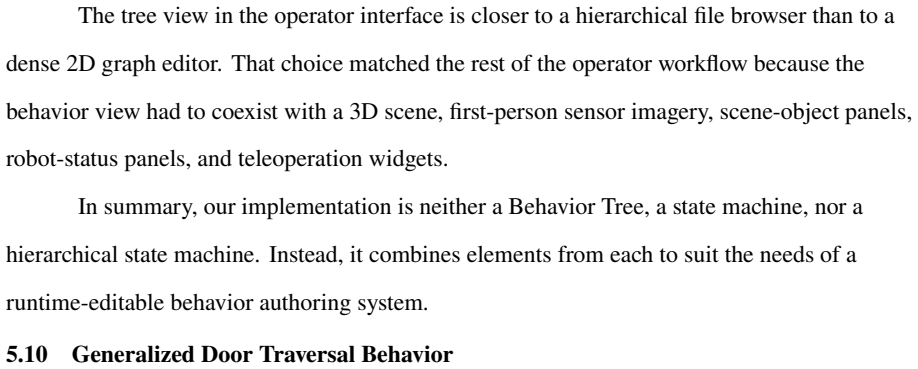
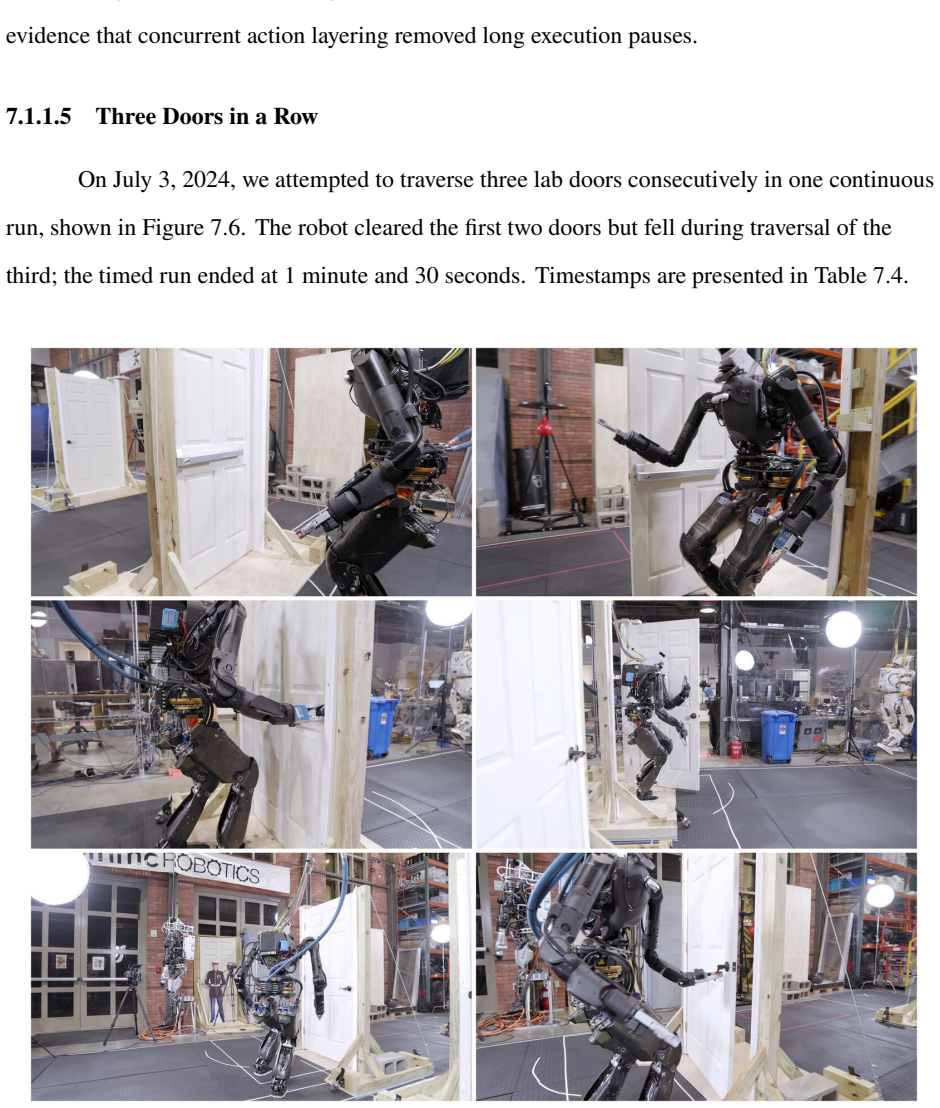
A behavior architecture for fast humanoid robot door traversals,
D. Calvert et al., “A behavior architecture for fast humanoid robot door traversals,” Robotics and Autonomous Systems, 2024
2024
-
[3]
Moveit! task constructor for task-level motion planning,
M. Görner, R. Haschke, H. Ritter, and J. Zhang, “Moveit! task constructor for task-level motion planning,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 190–196.doi: 10.1109/ICRA.2019.8793898
-
[4]
Formerly MoveIt Studio., 2021
PickNik Robotics,Moveit pro, Robotics application platform built on BehaviorTree.CPP and ROS2. Formerly MoveIt Studio., 2021. [Online]. Available: https://picknik.ai/pro/
2021
-
[5]
Faconti and BehaviorTree.CPP Contributors,Behaviortree.cpp, C++17 library for creating Behavior Trees
D. Faconti and BehaviorTree.CPP Contributors,Behaviortree.cpp, C++17 library for creating Behavior Trees. https://www.behaviortree.dev, 2019. [Online]. Available: https://github.com/BehaviorTree/BehaviorTree.CPP
2019
-
[6]
Faconti and Groot Contributors,Groot 1.0, Graphical editor for BehaviorTree.CPP (v3.8.x)
D. Faconti and Groot Contributors,Groot 1.0, Graphical editor for BehaviorTree.CPP (v3.8.x). Legacy version in maintenance mode., 2019. [Online]. Available: https://github.com/BehaviorTree/Groot
2019
-
[7]
Faconti and A
D. Faconti and A. Robotics,Groot2, IDE to create, monitor, and debug Behavior Trees. Compatible with BT.CPP 3 and 4., 2022. [Online]. Available: https://www.behaviortree.dev/groot
2022
-
[8]
Behaviors for robust door opening and doorway traversal with a force-sensing mobile manipulator,
A. Jain and C. C. Kemp, “Behaviors for robust door opening and doorway traversal with a force-sensing mobile manipulator,” inRSS Manipulation Workshop: Intelligence in Human Environments, Georgia Institute of Technology, Zurich, Jun. 2008. [Online]. Available: http://hdl.handle.net/1853/37399 280
2008
-
[9]
Planning for autonomous door opening with a mobile manipulator,
S. Chitta, B. Cohen, and M. Likhachev, “Planning for autonomous door opening with a mobile manipulator,” in2010 IEEE International Conference on Robotics and Automation, 2010, pp. 1799–1806.doi: 10.1109/ROBOT.2010.5509475
- [10]
-
[11]
G. Kang, H. Seong, D. Lee, and D. H. Shim, “A versatile door opening system with mobile manipulator through adaptive position-force control and reinforcement learning,”Robotics and Autonomous Systems, vol. 180, p. 104760, 2024,issn: 0921-8890.doi: https://doi.org/10.1016/j.robot.2024.104760 [Online]. Available: https://www.sciencedirect.com/science/articl...
-
[12]
Opening the sim-to-real door for humanoid pixel-to-action policy transfer,
H. Xue et al., “Opening the sim-to-real door for humanoid pixel-to-action policy transfer,” arXiv preprint arXiv:2512.01061, 2025
arXiv 2025
-
[13]
Humanoids 2022 - awards,
“Humanoids 2022 - awards,” 2022 IEEE-RAS International Conference on Humanoid Robots, Accessed: Apr. 13, 2026. [Online]. Available: https://www.humanoids2022.org/program/awards
2022
-
[14]
Congrats to IHMC robotics for winning bronze in my humanoid olympics: Doors event: Round knob push door with a time of 18 seconds,
B. Holson. “Congrats to IHMC robotics for winning bronze in my humanoid olympics: Doors event: Round knob push door with a time of 18 seconds,” General Robots, Accessed: Apr. 25, 2026. [Online]. Available: https://generalrobots.substack.com/p/congrats-to-ihmc-robotics-for-winning
2026
-
[15]
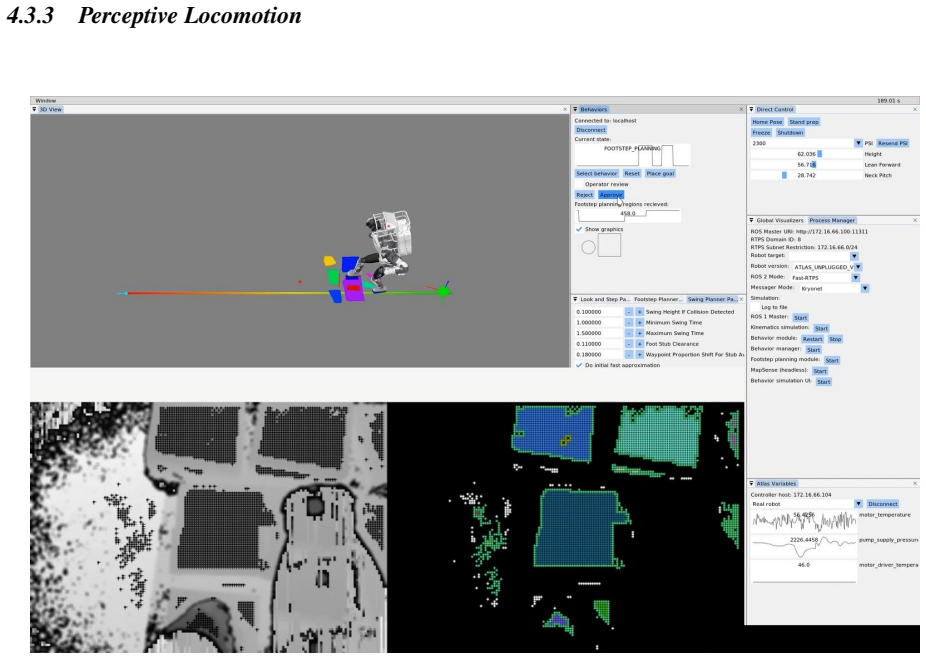
A fast, autonomous, bipedal walking behavior over rapid regions,
D. Calvert, B. Mishra, S. McCrory, S. Bertrand, R. Griffin, and J. Pratt, “A fast, autonomous, bipedal walking behavior over rapid regions,” in2022 IEEE-RAS 21st International Conference on Humanoid Robots (Humanoids), 2022, pp. 24–31.doi: 10.1109/Humanoids53995.2022.10000120
-
[16]
A system for resilient and adaptable loco-manipulation behaviors on humanoid robots,
D. Calvert et al., “A system for resilient and adaptable loco-manipulation behaviors on humanoid robots,”IEEE Robotics and Automation Letters, 2026, In preparation. 281
2026
-
[17]
Efficient terrain map using planar regions for footstep planning on humanoid robots,
B. Mishra, D. Calvert, S. Bertrand, J. Pratt, H. E. Sevil, and R. Griffin, “Efficient terrain map using planar regions for footstep planning on humanoid robots,” in2024 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2024
2024
-
[18]
B. Mishra et al., “Perception engine using a multi-sensor head to enable high-level humanoid robot behaviors,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 9251–9257.doi: 10.1109/ICRA46639.2022.9812178
-
[19]
Aquavis: A Perception-Aware Autonomous Navigation Framework for Underwater Vehicles,
B. Mishra, D. Calvert, S. Bertrand, S. McCrory, R. Griffin, and H. E. Sevil, “GPU-accelerated rapid planar region extraction for dynamic behaviors on legged robots,” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 8493–8499.doi: 10.1109/IROS51168.2021.9636009
-
[20]
Mixed reality teleoperation assistance for direct control of humanoids,
L. Penco et al., “Mixed reality teleoperation assistance for direct control of humanoids,” IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1937–1944, 2024.doi: 10.1109/LRA.2024.3349904
-
[21]
High-speed and impact resilient teleoperation of humanoid robots,
S. Bertrand et al., “High-speed and impact resilient teleoperation of humanoid robots,” in 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), IEEE, 2024, pp. 189–196
2024
-
[22]
Generating humanoid multi-contact through feasibility visualization,
S. McCrory, S. Bertrand, A. Mohan, D. Calvert, J. Pratt, and R. Griffin, “Generating humanoid multi-contact through feasibility visualization,” in2023 IEEE-RAS 22nd International Conference on Humanoid Robots (Humanoids), IEEE, 2023, pp. 1–8
2023
-
[23]
Detecting usable planar regions for legged robot locomotion,
S. Bertrand, I. Lee, B. Mishra, D. Calvert, J. Pratt, and R. Griffin, “Detecting usable planar regions for legged robot locomotion,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 4736–4742
2020
-
[24]
Coactive design: Designing support for interdependence in joint activity,
M. Johnson, J. M. Bradshaw, P. J. Feltovich, C. M. Jonker, M. B. van Riemsdijk, and M. Sierhuis, “Coactive design: Designing support for interdependence in joint activity,”J. Hum.-Robot Interact., vol. 3, no. 1, 43–69, Feb. 2014. 282
2014
-
[25]
Nielsen,10 usability heuristics for user interface design, https://www.nngroup.com/articles/ten-usability-heuristics/, Accessed: 2024-05-18, 1994
J. Nielsen,10 usability heuristics for user interface design, https://www.nngroup.com/articles/ten-usability-heuristics/, Accessed: 2024-05-18, 1994
2024
-
[26]
The CLARAty architecture for robotic autonomy,
R. Volpe, I. Nesnas, T. Estlin, D. Mutz, R. Petras, and H. Das, “The CLARAty architecture for robotic autonomy,” in2001 IEEE Aerospace Conference Proceedings (Cat. No.01TH8542), vol. 1, 2001, pp. 1/121–1/132.doi: 10.1109/AERO.2001.931701
-
[27]
Affordance templates for shared robot control,
S. Hart, P. Dinh, and K. A. Hambuchen, “Affordance templates for shared robot control,” in AAAI Fall Symposium on Artificial Intelligence and Human-Robot Interaction, NASA Technical Report JSC-CN-31935, AAAI, Arlington, VA, USA, Nov. 2014. [Online]. Available: https://ntrs.nasa.gov/citations/20140012413
arXiv 2014
-
[28]
The affordance template ROS package for robot task programming,
S. Hart, P. Dinh, and K. A. Hambuchen, “The affordance template ROS package for robot task programming,” inProceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 6227–6234.doi: 10.1109/ICRA.2015.7140073
-
[29]
A. Pettinger, C. Elliott, P. Fan, and M. Pryor, “Reducing the teleoperator’s cognitive burden for complex contact tasks using affordance primitives,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 11513–11518.doi: 10.1109/IROS45743.2020.9341576
-
[30]
A. Pettinger, F. Alambeigi, and M. Pryor, “A versatile affordance modeling framework using screw primitives to increase autonomy during manipulation contact tasks,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7224–7231, 2022.doi: 10.1109/LRA.2022.3181732
-
[31]
Director: A user interface designed for robot operation with shared autonomy,
P. Marion et al., “Director: A user interface designed for robot operation with shared autonomy,”Journal of Field Robotics, vol. 34, no. 2, pp. 262–280, 2017
2017
-
[32]
Human-robot collaborative high-level control with application to rescue robotics,
P. Schillinger, S. Kohlbrecher, and O. von Stryk, “Human-robot collaborative high-level control with application to rescue robotics,” in2016 IEEE International Conference on RoboticsandAutomation(ICRA),2016,pp.3898–3905.doi:10.1109/ICRA.2016.7487584 283
-
[33]
RAFCON: A graphical tool for engineering complex, robotic tasks,
S. G. Brunner, F. Steinmetz, R. Belder, and A. Dömel, “RAFCON: A graphical tool for engineering complex, robotic tasks,” in2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016
2016
-
[34]
Task-level authoring for remote robot teleoperation,
E. Senft et al., “Task-level authoring for remote robot teleoperation,”Frontiers in Robotics and AI, vol. 8, p. 707149, 2021.doi: 10.3389/frobt.2021.707149
-
[35]
A. De Luca, L. Muratore, and N. G. Tsagarakis, “Autonomous navigation with online replanning and recovery behaviors for wheeled-legged robots using behavior trees,”IEEE Robotics and Automation Letters, vol. 8, no. 10, pp. 6803–6810, 2023.doi: 10.1109/LRA.2023.3313052
-
[36]
J. Wang, A. Laurenzi, and N. Tsagarakis,Autonomous behavior planning for humanoid loco-manipulation through grounded language model, 2024. arXiv: 2408.08282[cs.RO]
arXiv 2024
-
[37]
J. J. Gibson,The Ecological Approach to Visual Perception. Houghton Mifflin, 1979
1979
-
[38]
S. Hart, A. H. Quispe, M. W. Lanighan, and S. Gee, “Generalized affordance templates for mobile manipulation,” in2022 International Conference on Robotics and Automation (ICRA), 2022, pp. 6240–6246.doi: 10.1109/ICRA46639.2022.9812082
-
[39]
Deploying the nasa valkyrie humanoid for ied response: An initial approach and evaluation summary,
S. J. Jorgensen et al., “Deploying the nasa valkyrie humanoid for ied response: An initial approach and evaluation summary,” in2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), 2019, pp. 1–8.doi: 10.1109/Humanoids43949.2019.9034993
-
[40]
M. Colledanchise and P. "Ogren,Behavior Trees in Robotics and AI: An Introduction. CRC Press, Taylor and Francis Group, 2018.doi: 10.1201/9780429489105
-
[41]
Ogren, and C. Smith, “A survey of behavior trees in robotics and ai,
M. Iovino, E. Scukins, J. Styrud, P. "Ogren, and C. Smith, “A survey of behavior trees in robotics and ai,”Robotics and Autonomous Systems, vol. 154, p. 104096, 2022,issn: 0921-8890.doi: https://doi.org/10.1016/j.robot.2022.104096 [Online]. Available: https://www.sciencedirect.com/science/article/pii/S0921889022000513 284
-
[42]
A. Jain and C. C. Kemp, “Pulling open doors and drawers: Coordinating an omni-directional base and a compliant arm with equilibrium point control,” in2010 IEEE International Conference on Robotics and Automation, 2010, pp. 1807–1814.doi: 10.1109/ROBOT.2010.5509445
-
[43]
Autonomous door opening and traversal,
B. Axelrod and W. H. Huang, “Autonomous door opening and traversal,” in2015 IEEE InternationalConference onTechnologiesfor PracticalRobotApplications (TePRA),IEEE, 2015.doi: 10.1109/TePRA.2015.7219680
-
[44]
The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors,
Y. Tenzer, L. P. Jentoft, and R. D. Howe, “The feel of MEMS barometers: Inexpensive and easily customized tactile array sensors,”IEEE Robotics & Automation Magazine, vol. 21, no. 3, pp. 89–95, 2014.doi: 10.1109/MRA.2014.2310152
-
[45]
Human-supervised control of the atlas humanoid robot for traversing doors,
N. Banerjee et al., “Human-supervised control of the atlas humanoid robot for traversing doors,” in2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), 2015, pp. 722–729.doi: 10.1109/HUMANOIDS.2015.7363442
-
[46]
Motion planning of mobile manipulator for navigation including door traversal,
K. Jang, S. Kim, and J. Park, “Motion planning of mobile manipulator for navigation including door traversal,”IEEE Robotics and Automation Letters, vol. 8, no. 7, pp. 4147–4154, 2023.doi: 10.1109/LRA.2023.3279612
-
[47]
Versatile multi-contact planning and control for legged loco-manipulation,
J.-P. Sleiman, F. Farshidian, and M. Hutter, “Versatile multi-contact planning and control for legged loco-manipulation,”Science Robotics, 2023.doi: 10.1126/scirobotics.adg5014
-
[48]
Enhancing autonomous door traversal for mobile manipulators using behavior trees,
K. Thamrongaphichartkul and S. Vongbunyong, “Enhancing autonomous door traversal for mobile manipulators using behavior trees,”IEEE Access, vol. 12, pp. 90317–90330, 2024. doi: 10.1109/ACCESS.2024.3420819
-
[49]
On realizing autonomous transport services in multi story buildings with doors and elevators,
P. R. Schulze, S. Müller, T. Müller, and H.-M. Gross, “On realizing autonomous transport services in multi story buildings with doors and elevators,”Frontiers in Robotics and AI, vol. 12, p. 1546894, 2025.doi: 10.3389/frobt.2025.1546894 285
- [50]
-
[51]
J. Z. Zhang et al.,Sumo: Dynamic and generalizable whole-body loco-manipulation, 2026. arXiv: 2604.08508[cs.RO]
Pith/arXiv arXiv 2026
-
[52]
[Online]
DARPA,Darpa robotics challenge (drc), Accessed: 2026-05-06, 2026. [Online]. Available: https://www.darpa.mil/research/programs/darpa-robotics-challenge
2026
-
[53]
[Online]
Wikipedia contributors,Swing (java), Accessed: 2026-05-06, 2026. [Online]. Available: https://en.wikipedia.org/wiki/Swing_(Java)
2026
-
[54]
[Online]
jMonkeyEngine,Jmonkeyengine, Accessed: 2026-05-06, 2026. [Online]. Available: https://jmonkeyengine.org/
2026
-
[55]
ROS2,Rviz,Accessed:2026-05-06,2026.[Online].Available:https://github.com/ros2/rviz
2026
-
[56]
Guillemet,Imguizmo, Accessed: 2026-05-06, 2026
C. Guillemet,Imguizmo, Accessed: 2026-05-06, 2026. [Online]. Available: https://github.com/cedricguillemet/imguizmo
2026
-
[57]
[Online]
MoveIt,Quickstart in rviz tutorial, Accessed: 2026-05-06, 2026. [Online]. Available: https: //moveit.picknik.ai/main/doc/tutorials/quickstart_in_rviz/quickstart_in_rviz_tutorial.html
2026
-
[58]
NASA’s space robotics challenge: Advancing robotics for future exploration missions,
K. A. Hambuchen et al., “NASA’s space robotics challenge: Advancing robotics for future exploration missions,” inAIAA SPACE and Astronautics Forum and Exposition, 2017.doi: 10.2514/6.2017-5120
-
[59]
Carnegie Robotics,Multisense SL sensor, https://www.carnegierobotics.com/multisense-stereo-cameras, Tri-modal sensor package with stereo cameras and a spindle-mounted lidar, 2024
2024
-
[60]
Hokuyo Automatic Co.,UTM-30LX-EW scanning laser rangefinder, https://www.hokuyo-aut.jp/search/single.php?serial=169, 270-degree scanning lidar used in the MultiSense SL, 2024. 286
2024
-
[61]
A thousand years of productivity: The jrebel story,
J. Kabanov and V. Vene, “A thousand years of productivity: The jrebel story,”Software: Practice and Experience, vol. 44, no. 1, pp. 105–127, 2014.doi: 10.1002/spe.2158
-
[62]
Perforce Software,JRebel, https://www.jrebel.com/, Accessed: 2026-05-14, 2026
2026
-
[63]
Footstep planning for autonomous walking over rough terrain,
R. Griffin, G. Wiedebach, S. McCrory, S. Bertrand, I. Lee, and J. Pratt, “Footstep planning for autonomous walking over rough terrain,” arXiv, 2019. [Online]. Available: https://arxiv.org/abs/1907.08673
Pith/arXiv arXiv 2019
-
[64]
OctoMap: An efficient probabilistic 3D mapping framework based on octrees,
A. Hornung, K. M. Wurm, M. Bennewitz, C. Stachniss, and W. Burgard, “OctoMap: An efficient probabilistic 3D mapping framework based on octrees,”Autonomous Robots, vol. 34, no. 3, pp. 189–206, 2013.doi: 10.1007/s10514-012-9321-0
-
[65]
Cornut,Dear imgui, 2024
O. Cornut,Dear imgui, 2024. [Online]. Available: https://www.dearimgui.com/
2024
-
[66]
[Online]
libGDX Community,Libgdx, 2024. [Online]. Available: https://libgdx.com
2024
-
[67]
[Online]
Eclipse Foundation,Eclipse ide, 2026. [Online]. Available: https://eclipseide.org/
2026
-
[68]
[Online]
Blender Foundation,Blender, 2026. [Online]. Available: https://www.blender.org/
2026
-
[69]
[Online]
Valve Software,Openvr, 2024. [Online]. Available: https://github.com/ValveSoftware/openvr [70]Intel realsense lidar camera l515. [Online]. Available: https://www.intelrealsense.com/lidar-camera-l515/
2024
-
[70]
Ouster,Os0 ultra-wide field-of-view lidar sensor for autonomous vehicles and robotics, https://ouster.com/products/hardware/os0-lidar-sensor, Accessed: 2024-04-27, 2024
2024
-
[71]
You only look once: Unified, real-time object detection,
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You only look once: Unified, real-time object detection,”Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 779–788, 2016
2016
-
[72]
Coumans and Y
E. Coumans and Y. Bai,Pybullet, a python module for physics simulation for games, robotics and machine learning, http://pybullet.org, 2016–2021
2016
-
[73]
SAKE Robotics,Ezgripper™robotic grippers, https://sakerobotics.com/, 2024. 287
2024
-
[74]
Single-stage keypoint-based category-level object pose estimation from an RGB image,
Y. Lin, J. Tremblay, S. Tyree, P. A. Vela, and S. Birchfield, “Single-stage keypoint-based category-level object pose estimation from an RGB image,” inIEEE International Conference on Robotics and Automation (ICRA), 2022
2022
-
[75]
Unitree Robotics,Unitree H1-2 full-size universal humanoid robot, https://www.unitree.com/h1, 2024
2024
-
[76]
FoundationPose: Unified 6d pose estimation and tracking of novel objects,
B. Wen, W. Yang, J. Kautz, and S. Birchfield, “FoundationPose: Unified 6d pose estimation and tracking of novel objects,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024
2024
-
[77]
Touch feedback and contact reflexes using the psyonic ability hand,
A. Akhtar, J. Cornman, J. Austin, and D. Bala, “Touch feedback and contact reflexes using the psyonic ability hand,” inMEC Symposium, 2022.doi: 10.57922/mec.1956
-
[78]
Rrt-connect: An efficient approach to single-query path planning,
J. J. Kuffner and S. M. LaValle, “Rrt-connect: An efficient approach to single-query path planning,” inProceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), IEEE, vol. 2, 2000, pp. 995–1001
2000
-
[79]
[Online]
StereoLabs,Zed x mini stereo camera | stereolabs, Accessed: 2024-04-26, 2024. [Online]. Available: https://www.stereolabs.com/store/products/zed-x-mini-stereo-camera
2024
-
[80]
Design of a momentum-based control framework and application to the humanoid robot atlas,
T. Koolen et al., “Design of a momentum-based control framework and application to the humanoid robot atlas,”International Journal of Humanoid Robotics, vol. 13, no. 01, p. 1650007, 2016
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.