LAP: An Agent-to-Instrument Protocol for Autonomous Science
Pith reviewed 2026-06-28 09:48 UTC · model grok-4.3
The pith
The Lab Agent Protocol adds four physical-world primitives to connect reasoning agents with lab instruments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
LAP retains the peer-to-peer, discovery-first, task-lifecycle structure of recent agent protocols and adds four physical-world primitives: the InstrumentCard as a signed capability and physical-limit description, first-class reservation for exclusive instrument and sample locking, a safety-fence handshake with operator-confirmation tokens cryptographically bound to a specific task, and a MeasurementResult schema that makes every result physically typed with units, calibration, uncertainty, and reproducibility by construction. The protocol specifies roles, a six-layer architecture, the method set, state machines, error model, cross-laboratory federation, and demonstrates an end-to-end autonom
What carries the argument
The four physical-world primitives: InstrumentCard for capabilities and limits, first-class reservation for locking, safety-fence handshake for hazardous operations, and MeasurementResult schema for typed outcomes.
If this is right
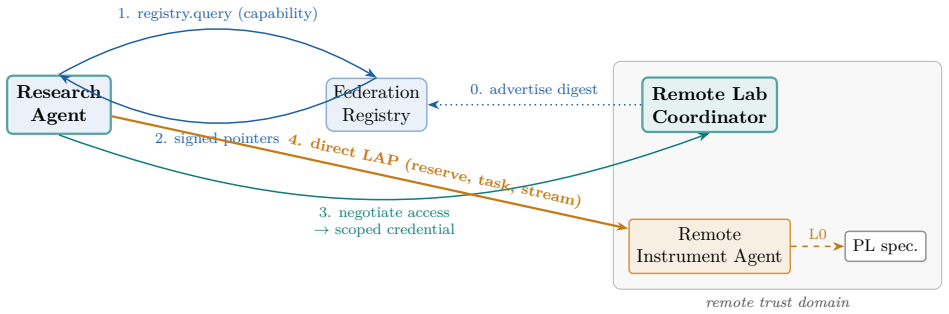
- Agents discover instruments and their physical limits through signed capability cards.
- Exclusive access to instruments and samples is enforced via first-class reservations.
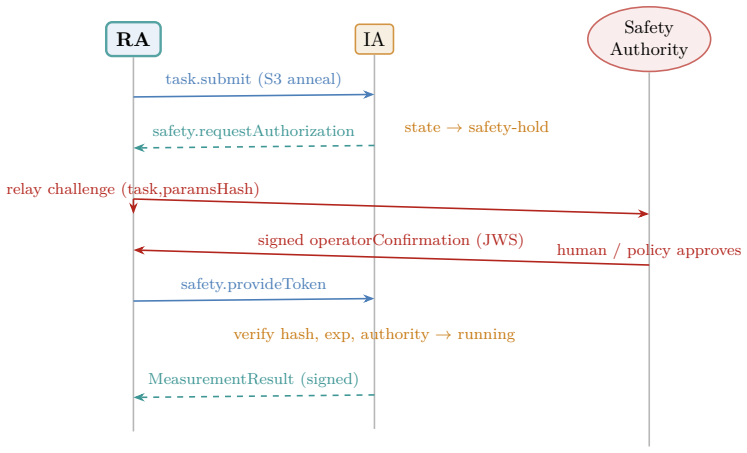
- Hazardous or irreversible operations are gated by task-bound safety tokens requiring operator confirmation.
- All measurement results carry units, calibration anchors, uncertainty values, and reproducibility metadata.
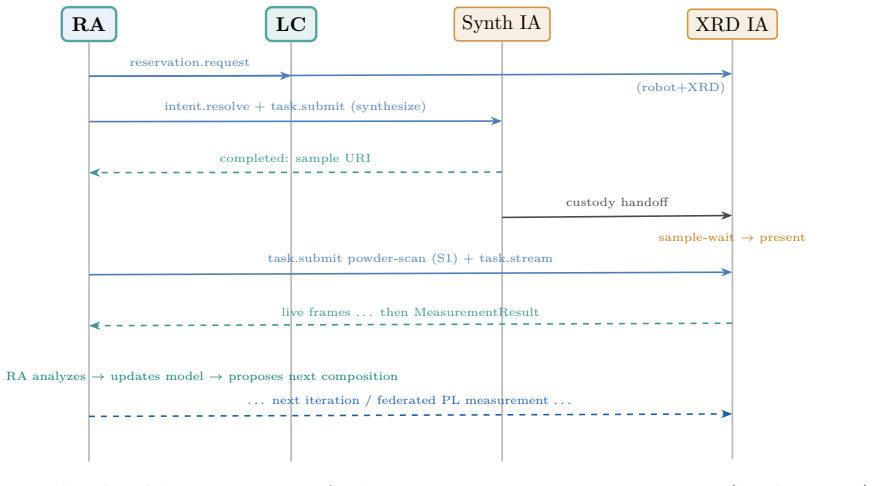
- Closed-loop autonomous campaigns can execute end-to-end across instruments using the shared protocol.
Where Pith is reading between the lines
- Widespread use would reduce duplication of integration code across different self-driving laboratory setups.
- The same primitives could apply to other domains involving physical ownership and safety-critical devices.
- Real-world deployment would test whether the state machines correctly manage concurrent physical access conflicts.
Load-bearing premise
That the design can be implemented on top of existing agent protocols without breaking their peer-to-peer or task-lifecycle structures and that instrument vendors will expose the new primitives.
What would settle it
An implementation attempt that either disrupts the peer-to-peer structure of existing agent protocols or cannot be supported by current instrument vendor standards.
Figures
read the original abstract
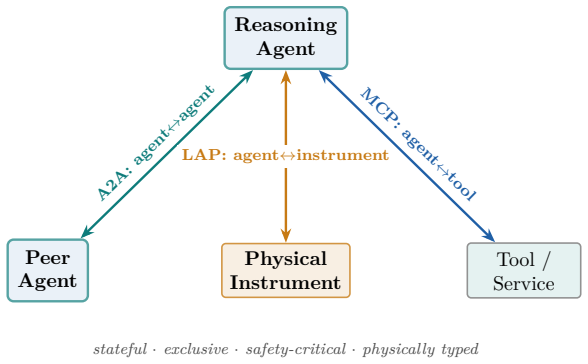
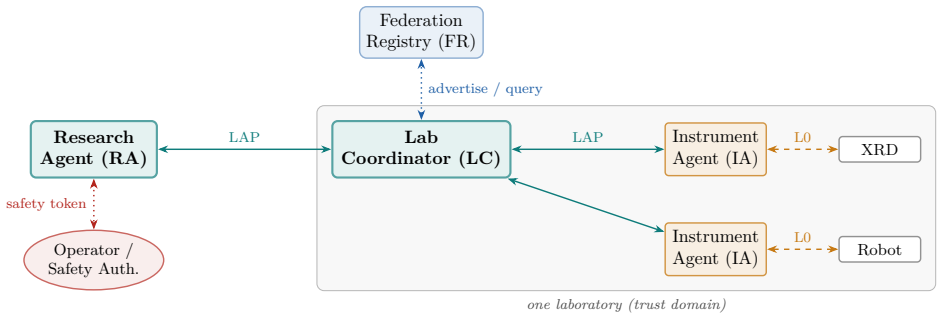
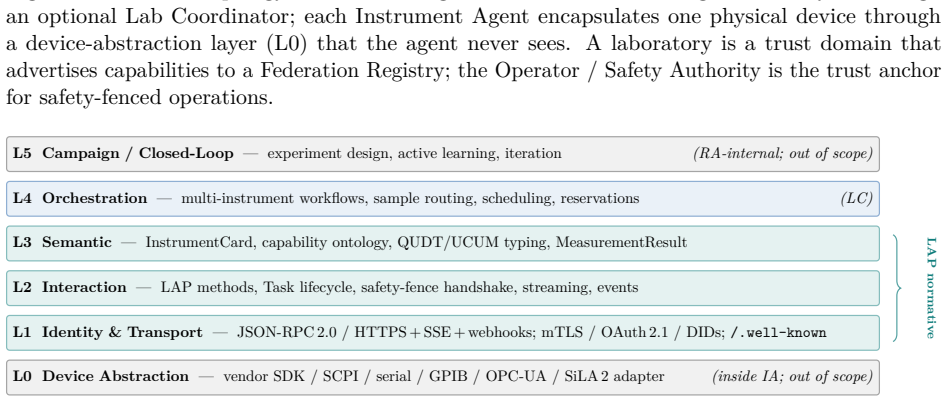
Autonomous science is moving from demonstration to infrastructure. Large language model agents now plan experiments, and self-driving laboratories execute them. Yet every such system rebuilds the link between the reasoning agent and the physical instrument from scratch, against fragmented vendor SDKs and standards built for deterministic software clients rather than probabilistic, goal-directed agents. Recent agent-interoperability protocols clarify two of the three edges of an agentic ecosystem (Anthropic's Model Context Protocol (MCP) standardizes the agent-to-tool edge, and Google's Agent2Agent (A2A) the agent-to-agent edge), but neither models the agent-to-instrument edge, where operations are stateful, safety-critical, exclusively owned, physically embodied, and produce measurements with units, calibration, and uncertainty. We present the Lab Agent Protocol (LAP), a protocol design that fills this gap. LAP retains A2A's peer-to-peer, discovery-first, task-lifecycle structure and adds four physical-world primitives: (i) the InstrumentCard, a signed capability and physical-limit description; (ii) first-class reservation for exclusive instrument and sample locking; (iii) a safety-fence handshake with operator-confirmation tokens cryptographically bound to a specific task and its parameters, gating hazardous and irreversible operations; and (iv) a MeasurementResult schema that makes every result physically typed (QUDT/UCUM), calibration-anchored, uncertainty-bearing, and reproducible by construction. We specify roles, a six-layer architecture, the JSON-RPC method set, the task and safety state machines, the error model, and cross-laboratory federation, and walk a closed-loop autonomous campaign through the protocol end-to-end. LAP is transport-compatible with the A2A/MCP ecosystem and encapsulates rather than replaces existing device standards such as SiLA 2 and OPC-UA.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes the Lab Agent Protocol (LAP) to address the missing agent-to-instrument interface in autonomous science systems. It claims to extend A2A and MCP by retaining their peer-to-peer discovery and task-lifecycle structures while adding four physical-world primitives: the InstrumentCard (signed capability description), first-class reservation for exclusive locking, a safety-fence handshake using operator-confirmation tokens, and a MeasurementResult schema enforcing physical typing (QUDT/UCUM), calibration, and uncertainty. The paper specifies roles, a six-layer architecture, JSON-RPC methods, task and safety state machines, an error model, cross-laboratory federation, and demonstrates the protocol via an end-to-end autonomous campaign example.
Significance. If the preservation of A2A semantics holds and the primitives prove implementable, LAP could reduce the repeated custom engineering of agent-instrument links in self-driving laboratories, improve safety for hazardous operations, and enforce reproducible, uncertainty-aware measurements. The explicit state-machine specifications and closed-loop campaign walkthrough are constructive elements of the design proposal.
major comments (2)
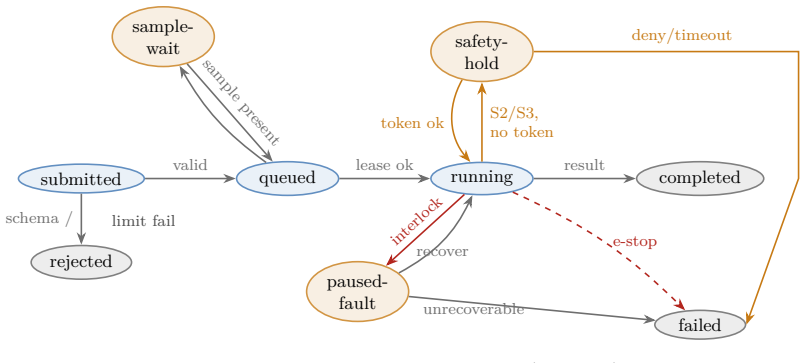
- [sections describing the task and safety state machines and the six-layer architecture] The central claim (abstract and introduction) that LAP retains A2A's peer-to-peer, discovery-first, task-lifecycle structure while adding the four primitives is asserted without an explicit mapping, side-by-side state-transition comparison, or formal argument that new safety states are strictly additive. This is load-bearing for the claim because the design's compatibility with existing A2A/MCP task lifecycles is the weakest assumption, yet the specification of the task and safety state machines provides no demonstration that non-instrument or non-hazardous tasks execute identically to pure A2A.
- [specification of JSON-RPC methods, state machines, and end-to-end campaign] The paper supplies no implementation, test cases, or validation data to confirm that InstrumentCard, reservation, safety-fence handshake, and MeasurementResult can be introduced on top of A2A/MCP without altering peer-to-peer discovery or task-lifecycle semantics, or that vendors can expose the primitives. This directly affects assessment of whether the protocol works in practice.
minor comments (1)
- [MeasurementResult schema definition] The description of the MeasurementResult schema references QUDT/UCUM but does not include an explicit example JSON instance or comparison to existing schemas in the methods section.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our protocol design paper. We address the two major comments point by point below, indicating planned revisions where appropriate to strengthen the compatibility claims and practical demonstration.
read point-by-point responses
-
Referee: [sections describing the task and safety state machines and the six-layer architecture] The central claim (abstract and introduction) that LAP retains A2A's peer-to-peer, discovery-first, task-lifecycle structure while adding the four primitives is asserted without an explicit mapping, side-by-side state-transition comparison, or formal argument that new safety states are strictly additive. This is load-bearing for the claim because the design's compatibility with existing A2A/MCP task lifecycles is the weakest assumption, yet the specification of the task and safety state machines provides no demonstration that non-instrument or non-hazardous tasks execute identically to pure A2A.
Authors: We agree that the compatibility claim requires stronger substantiation through explicit comparison. In the revised manuscript we will insert a new subsection (in the state-machine specification) containing a side-by-side state-transition table for the core A2A task lifecycle versus the LAP-extended version. The table will show that the four new primitives are strictly additive: non-hazardous and non-instrument tasks traverse exactly the same states and transitions as pure A2A, while the safety-fence handshake is invoked only for operations that declare hazardous or irreversible parameters. A short formal argument will accompany the table, demonstrating that the safety states do not alter the peer-to-peer discovery or task-lifecycle semantics for the base case. revision: yes
-
Referee: [specification of JSON-RPC methods, state machines, and end-to-end campaign] The paper supplies no implementation, test cases, or validation data to confirm that InstrumentCard, reservation, safety-fence handshake, and MeasurementResult can be introduced on top of A2A/MCP without altering peer-to-peer discovery or task-lifecycle semantics, or that vendors can expose the primitives. This directly affects assessment of whether the protocol works in practice.
Authors: The manuscript is a protocol specification whose primary contribution is the design and the closed-loop campaign walkthrough. We acknowledge that concrete implementation artifacts and test suites would further support practical assessment. In revision we will augment the end-to-end example with pseudocode for the four new primitives and the JSON-RPC method signatures, and we will add an explicit statement that the layering is intended to preserve A2A discovery and lifecycle semantics by construction. Full reference implementations and vendor exposure demonstrations remain future work and are outside the scope of the current design paper. revision: partial
Circularity Check
No circularity: protocol design proposal with no derivations or self-referential reductions
full rationale
The paper is a design specification for the LAP protocol that adds four primitives (InstrumentCard, reservation, safety-fence handshake, MeasurementResult) while asserting compatibility with A2A/MCP structures. It contains no equations, fitted parameters, predictions, or mathematical derivations. Claims rest on explicit specification of roles, JSON-RPC methods, state machines, and an end-to-end example rather than reduction to prior results. No self-citations are load-bearing; references to A2A/MCP are external standards. The central claim is the protocol definition itself, which is self-contained as a constructive proposal without circular reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption A2A and MCP structures can be extended for stateful, safety-critical, physically embodied operations without structural conflict.
invented entities (2)
-
InstrumentCard
no independent evidence
-
safety-fence handshake with operator-confirmation tokens
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Socratic agents for autonomous scientific discovery in high-dimensional physical systems
AHOIS is a Socratic multi-agent AI that autonomously discovers and validates a random-interference encoding strategy for multimode fiber optics, achieving 76.97% MNIST and 83.17% Fashion-MNIST accuracy with 16x16 meas...
Reference graph
Works this paper leans on
-
[1]
Agent network protocol (ANP) specification
Agent Network Protocol Community. Agent network protocol (ANP) specification. https://agentnetworkprotocol.com/en/specs/ 07-anp-agent-description-protocol-specification/, 2025
2025
-
[2]
Allotrope data format and allotrope foundation ontologies.https: //www.allotrope.org/, 2024
Allotrope Foundation. Allotrope data format and allotrope foundation ontologies.https: //www.allotrope.org/, 2024
2024
-
[3]
Model context protocol specification (2025-11-25)
Anthropic. Model context protocol specification (2025-11-25). https:// modelcontextprotocol.io/specification/2025-11-25, 2025. Donated to the Agen- tic AI Foundation / Linux Foundation, December 2025
2025
-
[4]
Analytical information markup language (AnIML).https://www.animl
ASTM International. Analytical information markup language (AnIML).https://www.animl. org/, 2023
2023
-
[5]
Boiko, Robert MacKnight, Ben Kline, and Gabe Gomes
Daniil A. Boiko, Robert MacKnight, Ben Kline, and Gabe Gomes. Autonomous chemical re- search with large language models.Nature, 624:570–578, 2023. doi: 10.1038/s41586-023-06792-0. URLhttps://www.nature.com/articles/s41586-023-06792-0
-
[6]
Bran, Sam Cox, Oliver Schilter, Carlo Baldassari, Andrew D
Andres M. Bran, Sam Cox, Oliver Schilter, Carlo Baldassari, Andrew D. White, and Philippe Schwaller. Augmenting large language models with chemistry tools.Nature Machine Intelligence, 6:525–535, 2024. doi: 10.1038/s42256-024-00832-8. URLhttps://www.nature.com/articles/ s42256-024-00832-8. 29
-
[7]
Benjamin Burger, Phillip M. Maffettone, Vladimir V. Gusev, Catherine M. Aitchison, Yang Bai, Xiaoyu Wang, Xiaobo Li, Ben M. Alston, Buyi Li, Rob Clowes, Nicola Rankin, Brandon Harris, Reiner Sebastian Sprick, and Andrew I. Cooper. A mobile robotic chemist.Nature, 583: 237–241, 2020. doi: 10.1038/s41586-020-2442-2. URLhttps://www.nature.com/articles/ s4158...
-
[8]
AGNTCY: Open multi-agent system infrastructure
Cisco Outshift and Linux Foundation. AGNTCY: Open multi-agent system infrastructure. https://docs.agntcy.org/, 2025
2025
-
[9]
Tianwei Dai, Sriram Vijayakrishnan, Filip T. Szczypiński, Jean-François Ayme, Ehsan Simaei, Thomas Fellowes, Rob Clowes, Lyubomir Kotopanov, Caitlin E. Shields, Zhengxue Zhou, John W. Ward, and Andrew I. Cooper. Autonomous mobile robots for exploratory synthetic chemistry.Nature, 635:890–897, 2024. doi: 10.1038/s41586-024-08173-7. URLhttps://www. nature.c...
-
[10]
Leo R. Dalesio, Jeffrey O. Hill, Martin Kraimer, Stephen Lewis, Douglas Murray, Stephan Hunt, William Watson, Matthias Clausen, and John Dalesio. The Experimental Physics and Industrial Control System architecture: Past, present, and future.Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated...
-
[11]
Abul Ehtesham, Aditi Singh, Gaurav Kumar Gupta, and Saket Kumar. A survey of agent interoperability protocols: Model context protocol (MCP), agent communication protocol (ACP), agent-to-agent protocol (A2A), and agent network protocol (ANP).arXiv preprint arXiv:2505.02279, 2025. URLhttps://arxiv.org/abs/2505.02279
arXiv 2025
-
[12]
Emerald cloud lab.https://www.emeraldcloudlab.com/, 2024
Emerald Cloud Lab. Emerald cloud lab.https://www.emeraldcloudlab.com/, 2024
2024
-
[13]
Sahasrabuddhe, Matthew J
Yuxing Fei, Bernardus Rendy, Rishi Kumar, Olympia Dartsi, Hrushikesh P. Sahasrabuddhe, Matthew J. McDermott, Zheren Wang, Nathan J. Szymanski, Lauren N. Walters, David Milsted, Yan Zeng, Anubhav Jain, and Gerbrand Ceder. AlabOS: A Python-based reconfigurable workflow management framework for autonomous laboratories.Digital Discovery, 3:2275–2288,
-
[14]
URL https://pubs.rsc.org/en/content/articlehtml/ 2024/dd/d4dd00129j
doi: 10.1039/D4DD00129J. URL https://pubs.rsc.org/en/content/articlehtml/ 2024/dd/d4dd00129j
-
[15]
KQML as an agent commu- nication language
Tim Finin, Richard Fritzson, Don McKay, and Robin McEntire. KQML as an agent commu- nication language. InProceedings of the Third International Conference on Information and Knowledge Management (CIKM), 1994. doi: 10.1145/191246.191322
-
[16]
FIPA ACL message structure specification (sc00061g)
FIPA. FIPA ACL message structure specification (sc00061g). Technical report, Foundation for Intelligent Physical Agents, 2002. URLhttp://www.fipa.org/specs/fipa00003/OC00003A. html
2002
-
[17]
Agent2agent (A2A) protocol specification v1.0
Google and Linux Foundation. Agent2agent (A2A) protocol specification v1.0. https:// a2a-protocol.org/latest/specification/, 2025
2025
-
[18]
Agent communication protocol (ACP).https://www.ibm.com/think/topics/ agent-communication-protocol, 2025
IBM BeeAI. Agent communication protocol (ACP).https://www.ibm.com/think/topics/ agent-communication-protocol, 2025
2025
-
[19]
Standard commands for programmable instruments (SCPI) and virtual in- strument software architecture (VISA).https://www.ivifoundation.org/About-IVI/scpi
IVI Foundation. Standard commands for programmable instruments (SCPI) and virtual in- strument software architecture (VISA).https://www.ivifoundation.org/About-IVI/scpi. html, 2024. 30
2024
-
[20]
Yankai Jiang, Wenjie Lou, Lilong Wang, Zhenyu Tang, Shiyang Feng, Jiaxuan Lu, Haoran Sun, Yaning Pan, Shuang Gu, Haoyang Su, Feng Liu, Wangxu Wei, Pan Tan, Dongzhan Zhou, Fenghua Ling, Cheng Tan, Bo Zhang, Xiaosong Wang, Lei Bai, and Bowen Zhou. SCP: Accelerating discovery with a global web of autonomous scientific agents.arXiv preprint arXiv:2512.24189, ...
arXiv 2025
-
[21]
Daniel Juchli. SiLA 2: The next generation lab automation standard.Advances in Biochemical Engineering/Biotechnology, 182:147–174, 2022. doi: 10.1007/10_2022_204. URL https: //link.springer.com/chapter/10.1007/10_2022_204
-
[22]
Web of Things (WoT) Thing Description 1.1
Sebastian Kaebisch, Michael McCool, and Ege Korkan. Web of Things (WoT) Thing Description 1.1. W3c recommendation, World Wide Web Consortium (W3C), December 2023. URL https://www.w3.org/TR/wot-thing-description11/. W3C Recommendation 05 December 2023
2023
-
[23]
Lucas J. Koerner, Thomas A. Caswell, Daniel B. Allan, and Stuart I. Campbell. A Python instrument control and data acquisition suite for reproducible research.IEEE Transactions on Instrumentation and Measurement, 69(4):1698–1707, 2020. doi: 10.1109/TIM.2019.2914711. URLhttps://www.osti.gov/biblio/1615722
-
[24]
Toward self-driving laboratory 2.0 for chemistry and materials discovery.Materials Horizons, 2026
Heeseung Lee, Hyuk Jun Yoo, Hye Su Jang, Byeongho Park, Yang Jeong Park, and Sang Soo Han. Toward self-driving laboratory 2.0 for chemistry and materials discovery.Materials Horizons, 2026. doi: 10.1039/D5MH01984B. URL https://pubs.rsc.org/en/content/ articlehtml/2026/mh/d5mh01984b
-
[25]
Shray Mathur, Noah van der Vleuten, Kevin G. Yager, and Esther H. R. Tsai. VISION: A modular AI assistant for natural human-instrument interaction at scientific user facilities.arXiv preprint arXiv:2412.18161, 2024. URLhttps://arxiv.org/abs/2412.18161
arXiv 2024
-
[26]
Payne, Valentina Tamma, and Jacopo de Berardinis
Wilf Morlidge, Elliott Watkiss-Leek, George Hannah, Harry Rostron, Andrew Ng, Ewan Johnson, Andrew Mitchell, Terry R. Payne, Valentina Tamma, and Jacopo de Berardinis. The AnIML ontology: Enabling semantic interoperability for large-scale experimental data in interconnected scientific labs.arXiv preprint arXiv:2604.01728, 2026. URLhttps://arxiv. org/abs/2...
arXiv 2026
-
[27]
Development of standards to support a mod- ular and autonomous laboratory ecosystem
National Institute of Standards and Technology. Development of standards to support a mod- ular and autonomous laboratory ecosystem. https://www.nist.gov/programs-projects/ development-standards-support-modular-and-autonomous-laboratory-ecosystem , 2024
2024
-
[28]
Bluesky and ophyd: Experiment orchestration and hardware abstraction.https://blueskyproject.io/ophyd/, 2015
NSLS-II / Brookhaven National Laboratory. Bluesky and ophyd: Experiment orchestration and hardware abstraction.https://blueskyproject.io/ophyd/, 2015. Deployed at 26 of 28 NSLS-II beamlines; adopted by APS, Diamond, Canadian Light Source, and others
2015
-
[29]
INTERSECT: Interconnected science ecosystem
Oak Ridge National Laboratory. INTERSECT: Interconnected science ecosystem. https: //www.ornl.gov/intersect, 2022. Accessed: 2026-05-29
2022
-
[30]
OPC unified architecture (IEC 62541)
OPC Foundation. OPC unified architecture (IEC 62541). https://opcfoundation.org/ about/opc-technologies/opc-ua/, 2024
2024
-
[31]
Laboratory and analytical device standard (LADS) OPC- UA companion specification
OPC Foundation and SPECTARIS. Laboratory and analytical device standard (LADS) OPC- UA companion specification. https://opcfoundation.org/markets-collaboration/lads/, 2023. 31
2023
-
[32]
PyVISA: Python package for control of measurement devices.https: //www.pyvisa.org/, 2024
PyVISA Contributors. PyVISA: Python package for control of measurement devices.https: //www.pyvisa.org/, 2024
2024
-
[33]
QUDT — Quantities, Units, Dimensions and Types Ontology.https://www.qudt
QUDT.org. QUDT — Quantities, Units, Dimensions and Types Ontology.https://www.qudt. org/, 2026
2026
-
[34]
The Unified Code for Units of Measure (UCUM).https://ucum.org/, 2023
Regenstrief Institute. The Unified Code for Units of Measure (UCUM).https://ucum.org/, 2023
2023
-
[35]
AI Agents for Enabling Autonomous Experiments at ORNL’s HPC and Manufacturing User Facilities
Daniel Rosendo, Stephen DeWitt, Renan Souza, Phillipe Austria, Tirthankar Ghosal, Marshall McDonnell, Ross Miller, Tyler Skluzacek, James Haley, Bruno Turcksin, Jesse McGaha, Benjamin Mintz, Feiyi Wang, Mallikarjun Shankar, Sarp Oral, and Rafael Ferreira da Silva. AI Agents for Enabling Autonomous Experiments at ORNL’s HPC and Manufacturing User Facilitie...
-
[36]
SiLA 2 Core Specification v1.1
SiLA Consortium. SiLA 2 Core Specification v1.1. Technical report, SiLA Consortium, 2022. https://sila-standard.com/standards/
2022
-
[37]
Hickman, Santiago Miret, Sergio Pablo-García, and Alán Aspuru-Guzik
Malcolm Sim, Mohammad Ghazi Vakili, Felix Strieth-Kalthoff, Han Hao, Riley J. Hickman, Santiago Miret, Sergio Pablo-García, and Alán Aspuru-Guzik. ChemOS 2.0: An orchestration architecture for chemical self-driving laboratories.Matter, 7(9):2959–2977, 2024. doi: 10. 1016/j.matt.2024.04.022. URL https://www.cell.com/matter/fulltext/S2590-2385(24) 00195-4
2024
-
[38]
ANSI/SLAS microplate dimensional standards.https://www.slas.org/resources/standards/, 2012
Society for Laboratory Automation and Screening. ANSI/SLAS microplate dimensional standards.https://www.slas.org/resources/standards/, 2012
2012
-
[39]
Felix Strieth-Kalthoff, Han Hao, Vandana Rathore, Joshua Derasp, Théophile Gaudin, Nicholas H. Angello, Martin Seifrid, Elina Tremblay-Lavallee, Adrianna Thomas, Haley Harvey, Yifeng Li, Robert Pollice, Pascal Friederich, Alexandre Tkatchenko, Leroy Cronin, and Alán Aspuru-Guzik. Delocalized, asynchronous, closed-loop discovery of organic laser emitters.S...
-
[40]
Szymanski, Bernardus Rendy, Yuxing Fei, Rishi E
Nathan J. Szymanski, Bernardus Rendy, Yuxing Fei, Rishi E. Kumar, Tanjin He, David Milsted, Matthew J. McDermott, Max Gallant, Ekin D. Cubuk, Amil Merchant, Hyungmin Kim, Anubhav Jain, Christopher J. Bartel, Kristin Persson, Yan Zeng, and Gerbrand Ceder. An autonomous laboratory for the accelerated synthesis of inorganic materials.Nature, 624: 86–91, 2023...
-
[41]
The F AIR Guiding Principles for scientific data management and stewardship,
Mark D. Wilkinson et al. The FAIR guiding principles for scientific data management and stewardship.Scientific Data, 3:160018, 2016. doi: 10.1038/sdata.2016.18
-
[42]
Zhenning Yang, Yuhan Chen, Patrick Tser Jern Kon, Tongyuan Miao, Hongyi Lin, Venkat Viswanathan, Danai Koutra, and Ang Chen. Experiment-as-Code Labs: A declarative stack for AI-driven scientific discovery.arXiv preprint arXiv:2605.04375, 2026. URLhttps://arxiv. org/abs/2605.04375. 32
Pith/arXiv arXiv 2026
-
[43]
Wenyu Zhang, Lucy Hao, Veronica Lai, Ryan Corkery, Jacob Jessiman, Jiayu Zhang, Junliang Liu, Yusuke Sato, Maria Politi, Matthew E. Reish, Rebekah Greenwood, Noah Depner, Jiyoon Min, Rama El-khawaldeh, Paloma Prieto, Ekaterina Trushina, and Jason E. Hein. IvoryOS: an interoperable web interface for orchestrating Python-based self-driving laboratories. Nat...
-
[44]
@co nt ext
Wenyu Zhang, Maria Politi, Rama El-khawaldeh, and Jason E. Hein. Interoperable natural language interfaces for self-driving labs via model context protocol.NeurIPS 2025 Workshop on AI for Accelerated Materials Design (AI4Mat), 2025. URLhttps://openreview.net/forum? id=yaZcgu8Cqe. 33 A Supplementary Material: Complete Schema Examples This appendix gives th...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.