SenseWalk: Agent-Based Semantic Trajectory Simulation Powered by Large Language Models in Zoned Environments
Pith reviewed 2026-07-02 06:05 UTC · model grok-4.3
The pith
An interactive system called SenseWalk lets LLM agents generate semantic trajectories by blending language model decisions with physical movement rules.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SenseWalk is an interactive system that supports simulating semantic trajectories by LLM-powered agents. We develop a simulation workflow that combines LLMs and the social force model to balance physical plausibility and semantic coherence. A user-friendly interface is designed to facilitate users in customizing the simulation configuration and analyzing simulation outputs. We also conduct a quantitative experiment to evaluate the effectiveness of our simulation workflow, and a user study (n=12) to assess the usefulness and efficiency of our system.
What carries the argument
The simulation workflow that combines LLMs for semantic decision making with the social force model for physical movement, operating within zoned environments.
If this is right
- Practitioners can simulate high-quality semantic trajectory data without costly real-world collection.
- The system reduces the need for substantial technical expertise in trajectory simulation.
- Users can customize and analyze simulations through an accessible interface.
- The approach supports better understanding of movement patterns by incorporating semantic information.
Where Pith is reading between the lines
- If effective, this method could be adapted for training AI models on human behavior in various settings like retail or public spaces.
- The zoned environment structure might allow integration with mapping data for real-world applications.
- Scaling the agent interactions could reveal emergent behaviors in large crowds not captured by current models.
Load-bearing premise
Combining LLMs with the social force model will successfully balance physical plausibility and semantic coherence in the generated trajectories.
What would settle it
A direct comparison showing that trajectories from the system deviate significantly from real human movement data in either physical accuracy or semantic alignment.
Figures
read the original abstract
Semantic trajectory analysis has recently emerged as an approach for modeling human movement by capturing implicit patterns and behaviors through semantic information (e.g., visitors' profiles and goals) beyond raw spatial paths to better understand why people move in certain ways. However, analyzing semantic trajectories in real-world scenarios remains challenging, as collecting high-quality data is costly and often lacks rich semantic information. Meanwhile, existing simulation tools require substantial technical expertise, which makes them difficult for practitioners to adopt. To address these limitations, the paper proposes ${SenseWalk}$, an interactive system that supports simulating semantic trajectories by LLM-powered agents. We develop a simulation workflow that combines LLMs and the social force model to balance physical plausibility and semantic coherence. A user-friendly interface is designed to facilitate users in customizing the simulation configuration and analyzing simulation outputs. We also conduct a quantitative experiment to evaluate the effectiveness of our simulation workflow, and a user study (n=12) to assess the usefulness and efficiency of our system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes SenseWalk, an interactive system for simulating semantic trajectories in zoned environments using LLM-powered agents. The core contribution is a simulation workflow that integrates large language models for semantic coherence (agent profiles and goals) with the social force model for physical plausibility. The paper describes a user-friendly interface for customizing simulations and analyzing outputs, and states that it conducted a quantitative experiment to evaluate the workflow's effectiveness together with a user study (n=12) to assess usefulness and efficiency.
Significance. If the quantitative experiment demonstrates that the LLM-social force workflow produces trajectories that are measurably both physically plausible and semantically coherent, the work could offer a practical advance in semantic trajectory simulation by lowering barriers to adoption compared with existing tools that require substantial technical expertise. The user study could further establish the system's value for practitioners. The proposal itself addresses a clear gap between costly real-world data collection and accessible simulation.
major comments (2)
- [Abstract] Abstract: The manuscript states that a quantitative experiment was conducted to evaluate the effectiveness of the simulation workflow that combines LLMs and the social force model, yet provides no description of the experimental design, metrics for physical plausibility versus semantic coherence, baselines, results, error bars, or statistical tests. This omission leaves the central claim without visible empirical support.
- [Abstract] Abstract: The user study is referenced only by sample size (n=12) with no information on tasks performed, dependent measures, quantitative or qualitative findings, or comparison conditions, preventing assessment of the claimed usefulness and efficiency of the interface.
minor comments (1)
- [Abstract] The abstract introduces the notion of 'zoned environments' without defining zoning or explaining how it interacts with the LLM-social force workflow; a brief clarification would improve readability.
Simulated Author's Rebuttal
We thank the referee for their careful reading and constructive feedback on the abstract. We agree that the abstract should be expanded to provide sufficient detail on the quantitative experiment and user study so that the central claims are empirically supported within the abstract itself. We will revise the abstract in the next version of the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The manuscript states that a quantitative experiment was conducted to evaluate the effectiveness of the simulation workflow that combines LLMs and the social force model, yet provides no description of the experimental design, metrics for physical plausibility versus semantic coherence, baselines, results, error bars, or statistical tests. This omission leaves the central claim without visible empirical support.
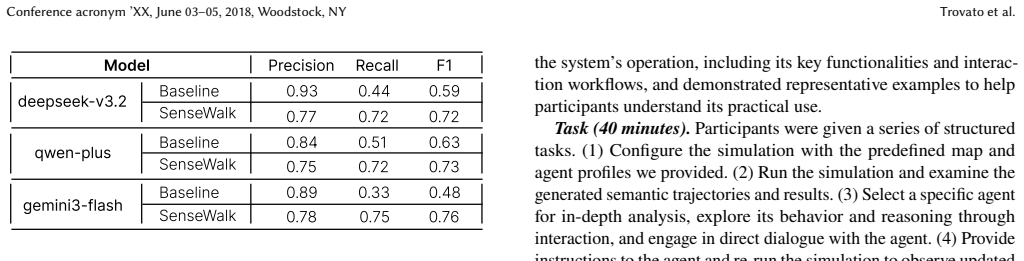
Authors: We agree that the current abstract does not include these details. The full manuscript contains a dedicated evaluation section that describes the experimental design (comparing LLM-augmented agents against social-force-only and random baselines in zoned environments), the metrics (physical plausibility via collision rate and trajectory smoothness; semantic coherence via goal-completion rate and profile alignment scored by an independent LLM judge), baselines, quantitative results with error bars, and statistical tests. To address the referee's concern directly in the abstract, we will add a concise summary of the design, metrics, and key findings (including significance) while respecting length limits. revision: yes
-
Referee: [Abstract] Abstract: The user study is referenced only by sample size (n=12) with no information on tasks performed, dependent measures, quantitative or qualitative findings, or comparison conditions, preventing assessment of the claimed usefulness and efficiency of the interface.
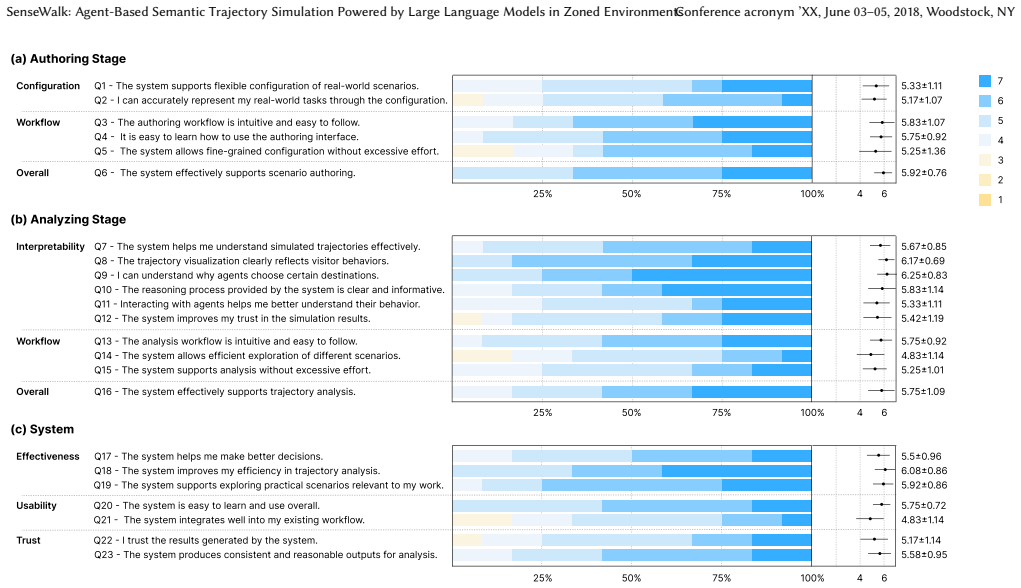
Authors: We acknowledge the abstract provides only the sample size. The full manuscript reports the user-study protocol (tasks: configuring zoned environments and agent profiles, running simulations, and inspecting outputs), dependent measures (NASA-TLX, SUS, task completion time, and open-ended feedback), quantitative results (mean scores and comparisons to a baseline non-LLM interface), and qualitative themes. We will revise the abstract to include a brief summary of tasks, measures, and main findings so readers can assess the claimed usefulness and efficiency. revision: yes
Circularity Check
No significant circularity
full rationale
The paper is a system proposal describing SenseWalk, an interactive workflow that combines LLMs (for semantic profiles/goals) with the social force model (for physical movement) to generate trajectories. No equations, parameter-fitting steps, derivations, or load-bearing self-citations appear in the abstract or described content. The central claim is evaluated via a quantitative experiment and user study (n=12), which constitute independent tests rather than reductions to fitted inputs or self-referential definitions. This matches the default expectation for non-circular system papers in cs.HC.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
2015.Semantic Trajectories: A Survey from Modeling to Application
BasmaH.Albanna,IbrahimF.Moawad,SherinM.Moussa,andMahmoudA.Sakr. 2015.Semantic Trajectories: A Survey from Modeling to Application. Springer International Publishing, Cham, 59–76. doi:10.1007/978-3-319-16667-4_4
-
[2]
Mohammed Almutairi, Charles Chiang, Haoze Guo, Matthew Belcher, Nandini Banerjee, Maria Milkowski, Svitlana Volkova, Daniel Nguyen, Tim Weninger, III Yankoski, Michael G, Trenton W Ford, and Diego Gómez-Zará. 2025. VIRT- LAB: An AI-Powered System for Flexible, Customizable, and Large-scale Team Simulations. InAdjunct Proceedings of the 38th Annual ACM Sym...
-
[3]
Sotiris Angelis, Konstantinos Kotis, and Dimitris Spiliotopoulos. 2021. Semantic TrajectoryAnalyticsandRecommenderSystemsinCulturalSpaces.BigDataand Cognitive Computing5, 4 (2021). doi:10.3390/bdcc5040080
-
[5]
RobertL.AxtellandJ.DoyneFarmer.2025. Agent-BasedModelinginEconomics and Finance: Past, Present, and Future.Journal of Economic Literature63, 1 (March 2025), 197–287. doi:10.1257/jel.20221319
-
[6]
Federico Bianchi and Flaminio Squazzoni. 2015. Agent-based models in sociology.WIREs Computational Statistics7, 4 (2015), 284–306. arXiv:https://wires.onlinelibrary.wiley.com/doi/pdf/10.1002/wics.1356 doi:10. 1002/wics.1356
- [7]
-
[8]
Sergey Dorokhin, Alexander Artemov, Dmitry Likhachev, Alexey Novikov, and Evgeniy Starkov. 2020. Traffic simulation: an analytical review.IOP Conference Series: Materials Science and Engineering918, 1 (sep 2020), 012058. doi:10. 1088/1757-899X/918/1/012058
2020
-
[9]
Yang Fang, Bei Luo, Ting Zhao, Dong He, Bingbing Jiang, and Qilie Liu. 2022. ST-SIGMA: Spatio-temporal semantics and interac- tion graph aggregation for multi-agent perception and trajectory forecast- ing.CAAI Transactions on Intelligence Technology7, 4 (2022), 744–
2022
-
[10]
arXiv:https://ietresearch.onlinelibrary.wiley.com/doi/pdf/10.1049/cit2.12145 doi:10.1049/cit2.12145
-
[11]
Santiago Garcia-Gabilondo, Yuya Shibuya, and Yoshihide Sekimoto. 2024. En- hancing geospatial retail analysis by integrating synthetic human mobility sim- ulations.Computers, Environment and Urban Systems108 (2024), 102058. doi:10.1016/j.compenvurbsys.2023.102058
-
[12]
Anindya Ghose, Beibei Li, and Siyuan Liu. 2019. Mobile Targeting Using Customer Trajectory Patterns.Management Science65, 11 (2019), 5027–5049. arXiv:https://doi.org/10.1287/mnsc.2018.3188 doi:10.1287/mnsc.2018.3188
-
[13]
Fosca Giannotti, Mirco Nanni, Dino Pedreschi, Fabio Pinelli, Chiara Renso, Salvatore Rinzivillo, and Roberto Trasarti. 2011. Unveiling the complexity of human mobility by querying and mining massive trajectory data.The VLDB Journal20, 5 (Oct. 2011), 695–719. doi:10.1007/s00778-011-0244-8
-
[14]
FoscaGiannotti,MircoNanni,FabioPinelli,andDinoPedreschi.2007. Trajectory patternmining.InProceedingsofthe13thACMSIGKDDInternationalConference on Knowledge Discovery and Data Mining(San Jose, California, USA)(KDD ’07). Association for Computing Machinery, New York, NY, USA, 330–339. doi:10.1145/1281192.1281230
-
[15]
ArisGkoulalas-DivanisandVassiliosS.Verykios.2008.Aprivacy-awaretrajectory tracking query engine.SIGKDD Explor. Newsl.10, 1 (May 2008), 40–49. doi:10. 1145/1412734.1412739
-
[16]
LetianGong,YanLin,XinyueZhang,YiwenLu,XuediHan,YichenLiu,Shengnan Guo, Youfang Lin, and Huaiyu Wan. 2024. Mobility-LLM: Learning Visiting Intentions and Travel Preference from Human Mobility Data with Large Language Models. InAdvances in Neural Information Processing Systems, A. Globerson, L. Mackey, D. Belgrave, A. Fan, U. Paquet, J. Tomczak, and C. Zhan...
-
[17]
Tesfay Gidey Hailu, Xiansheng Guo, Haonan Si, Lin Li, and Yukun Zhang. 2024. Theories and Methods for Indoor Positioning Systems: A Comparative Analysis, Challenges, and Prospective Measures.Sensors24, 21 (2024). doi:10.3390/ s24216876
2024
-
[18]
Zhenxuan He, Tong Zhang, Wangshu Wang, and Jing Li
-
[19]
A deep pedestrian trajectory generator for complex in- door environments.Transactions in GIS28, 2 (2024), 411–
2024
-
[20]
arXiv:https://onlinelibrary.wiley.com/doi/pdf/10.1111/tgis.13143 doi:10.1111/tgis.13143
-
[21]
Sirui Hong, Mingchen Zhuge, Jonathan Chen, Xiawu Zheng, Yuheng Cheng, Jinlin Wang, Ceyao Zhang, Zili Wang, Steven Ka Shing Yau, Zijuan Lin, Liyang Zhou, Chenyu Ran, Lingfeng Xiao, Chenglin Wu, and Jürgen Schmidhuber
-
[22]
InThe Twelfth International Conference on Learning Representations
MetaGPT: Meta Programming for A Multi-Agent Collaborative Framework. InThe Twelfth International Conference on Learning Representations. https: //openreview.net/forum?id=VtmBAGCN7o
-
[23]
Erzhen Hu, Yanhe Chen, Mingyi Li, Vrushank Phadnis, Pingmei Xu, Xun Qian, Alex Olwal, David Kim, Seongkook Heo, and Ruofei Du. 2025. DialogLab: Authoring, Simulating, and Testing Dynamic Human-AI Group Conversations. In Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST ’25). Association for Computing Machinery, N...
-
[24]
Zeyuan Huang, Cangjun Gao, Yaxian Shan, Haoxiang Hu, Qingkun Li, Xiaoming Deng, Cuixia Ma, Yu-Kun Lai, Yong-Jin Liu, Feng Tian, Guozhong Dai, and Hongan Wang. 2025. SketchGPT: A Sketch-based Multimodal Interface for Application-Agnostic LLM Interaction. InProceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST ’25). As...
-
[25]
TrajLLM:A Modular LLM-Enhanced Agent-Based Framework for Realistic Human Trajectory Simulation
ChenluJu,JiaxinLiu,ShobhitSinha,HaoXue,andFloraSalim.2025. TrajLLM:A Modular LLM-Enhanced Agent-Based Framework for Realistic Human Trajectory Simulation. InCompanion Proceedings of the ACM on Web Conference 2025. Association for Computing Machinery, New York, NY, USA, 2847–2850. doi:10. 1145/3701716.3715201
-
[26]
Kyuwon Kim, Jaeryeong Hwang, Younseo Lee, Jeanhee Lee, Sung-Eun Kim, and Hyo-Jeong So. 2025. Your Thoughtful Opponent: Embracing Cognitive Conflict with Peer Agent. InAdjunct Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST Adjunct ’25). Association for Computing Machinery, New York, NY, USA, Article 180, 3 page...
-
[27]
doi:10.1007/s10707- 020-00430-x
Alexandros Kontarinis, Karine Zeitouni, Claudia Marinica, Dan Vodislav, and DimitrisKotzinos.2021.Towardsasemanticindoortrajectorymodel:applicationto museumvisits.GeoInformatica25,2(April2021),311–352. doi:10.1007/s10707- 020-00430-x
- [29]
-
[30]
XinyiLi,SaiWang,SiqiZeng,YuWu,andYiYang.2024. AsurveyonLLM-based multi-agent systems: workflow, infrastructure, and challenges.Vicinagearth1, 1 (Oct. 2024), 9. doi:10.1007/s44336-024-00009-2
-
[31]
Ziyue Lin, Yi Shan, Lin Gao, Xinghua Jia, and Siming Chen. 2025. SimSpark: Interactive Simulation of Social Media Behaviors.Proc. ACM Hum.-Comput. Conference acronym ’XX, June 03–05, 2018, Woodstock, NY Trovato et al. Interact.9, 2, Article CSCW168 (May 2025), 32 pages. doi:10.1145/3711066
- [32]
-
[33]
arXiv preprint arXiv:2506.23306 , year=
QiLiu,CanLi,andWanjingMa.2026. GATSim:UrbanMobilitySimulationwith Generative Agents. arXiv:2506.23306 [cs.AI] https://arxiv.org/abs/2506.23306
-
[34]
WeiwenLiu,XuHuang,XingshanZeng,XinlongHao,Shuai Yu,Dexun Li,Shuai Wang, Weinan Gan, Zhengying Liu, Yuanqing Yu, Zezhong Wang, Yuxian Wang, Wu Ning, Yutai Hou, Bin Wang, Chuhan Wu, Xinzhi Wang, Yong Liu, Yasheng Wang, Duyu Tang, Dandan Tu, Lifeng Shang, Xin Jiang, Ruiming Tang, Defu Lian, Qun Liu, and Enhong Chen. 2025. ToolACE: Winning the Points of LLM F...
-
[35]
Gregor Lämmel and Gunnar Flötteröd. 2015. A CA Model for Bidirectional Pedestrian Streams.Procedia Computer Science52 (2015), 950–955. doi:10. 1016/j.procs.2015.05.171 The 6th International Conference on Ambient Systems, Networks and Technologies (ANT-2015), the 5th International Conference on Sustainable Energy Information Technology (SEIT-2015)
2015
-
[36]
C.M. Macal and M.J. North. 2005. Tutorial on agent-based modeling and simulation. InProceedings of the Winter Simulation Conference, 2005.14 pp.–. doi:10.1109/WSC.2005.1574234
-
[37]
Charles M. Macal and Michael J. North. 2009. Agent-based modeling and simulation. InProceedings of the 2009 Winter Simulation Conference (WSC). 86–98. doi:10.1109/WSC.2009.5429318
-
[38]
YuMei,YuanxiWang,ShiyiWang,QingyangWan,ZhuojunLi,ChunYu,Weinan Shi, and Yuanchun Shi. 2025. InterQuest: A Mixed-Initiative Framework for Dynamic User Interest Modeling in Conversational Search. InProceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST ’25). Association for Computing Machinery, New York, NY, USA, Articl...
-
[39]
Michael Mireku Kwakye. 2017. Modelling and Design of Generic Semantic Trajectory Data Warehouse. doi:10.11575/PRISM/31331
-
[40]
Mehdi Moussaïd, Niriaska Perozo, Simon Garnier, Dirk Helbing, and Guy Ther- aulaz. 2010. The Walking Behaviour of Pedestrian Social Groups and Its Impact on Crowd Dynamics.PLOS ONE5, 4 (04 2010), 1–7. doi:10.1371/journal.pone. 0010047
-
[41]
Christian Nitzsche and Stefan Simm. 2024. Agent-based modeling to estimate the impactoflockdownscenariosandeventsonapandemicexemplifiedonSARS-CoV- 2.Scientific Reports14, 1 (June 2024), 13391. doi:10.1038/s41598-024-63795-1 Publisher: Nature Publishing Group
-
[42]
ChristineParent,StefanoSpaccapietra,ChiaraRenso,GennadyAndrienko,Natalia Andrienko, Vania Bogorny, Maria Luisa Damiani, Aris Gkoulalas-Divanis, Jose Macedo, Nikos Pelekis, Yannis Theodoridis, and Zhixian Yan. 2013. Semantic trajectories modeling and analysis.ACM Comput. Surv.45, 4, Article 42 (Aug. 2013), 32 pages. doi:10.1145/2501654.2501656
-
[43]
Joon Sung Park, Joseph O’Brien, Carrie Jun Cai, Meredith Ringel Morris, Percy Liang, and Michael S. Bernstein. 2023. Generative Agents: Interactive Simulacra of Human Behavior. InProceedings of the 36th Annual ACM Symposium on User Interface Software and Technology(San Francisco, CA, USA)(UIST ’23). Association for Computing Machinery, New York, NY, USA, ...
-
[44]
Joon Sung Park, Lindsay Popowski, Carrie Cai, Meredith Ringel Morris, Percy Liang, and Michael S. Bernstein. 2022. Social Simulacra: Creating Populated Prototypes for Social Computing Systems. InProceedings of the 35th Annual ACM Symposium on User Interface Software and Technology(Bend, OR, USA) (UIST ’22). Association for Computing Machinery, New York, N...
-
[45]
2012.Problem seeking: An architectural programming primer
William M Pena and Steven A Parshall. 2012.Problem seeking: An architectural programming primer. John Wiley & Sons
2012
-
[46]
Panos I. Philippopoulos, Ioannis C. Drivas, Nikolaos D. Tselikas, Kostas N. Koutrakis, Elena Melidi, and Dimitrios Kouis. 2024. A Holistic Approach for Enhancing Museum Performance and Visitor Experience.Sensors24, 3 (2024). doi:10.3390/s24030966
-
[47]
Aurora Polo-Rodríguez, Miguel Ángel Anguita-Molina, Ignacio Rojas-Ruiz, and Javier Medina-Quero. 2025. Multi-occupant tracking with radar and wearable devices for enhanced accuracy in indoor environments.Engineering Applications ofArtificialIntelligence154(2025),110872. doi:10.1016/j.engappai.2025.110872
-
[48]
Markazi, and Mo- hammadreza Bemanian
Morteza Rahbar, Mohammadjavad Mahdavinejad, Amir H.D. Markazi, and Mo- hammadreza Bemanian. 2022. Architectural layout design through deep learning and agent-based modeling: A hybrid approach.Journal of Building Engineering 47 (2022), 103822. doi:10.1016/j.jobe.2021.103822
- [49]
-
[50]
2022.Simulation
Sheldon M Ross. 2022.Simulation. academic press
2022
-
[51]
Michael J Seitz, Felix Dietrich, Gerta Köster, and Hans-Joachim Bungartz. 2016. The superposition principle: A conceptual perspective on pedestrian stream simulations.Collective Dynamics1 (2016), 1–19
2016
-
[52]
Donghoon Shin, Daniel Lee, Gary Hsieh, and Gromit Yeuk-Yin Chan. 2025. PosterMate: Audience-driven Collaborative Persona Agents for Poster Design. In Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST ’25). Association for Computing Machinery, New York, NY, USA, Article 201, 20 pages. doi:10.1145/3746059.3747769
-
[53]
Stefano Spaccapietra, Christine Parent, Maria Luisa Damiani, Jose Antonio de Macedo, Fabio Porto, and Christelle Vangenot. 2008. A conceptual view on trajectories.Data & Knowledge Engineering65, 1 (2008), 126–146. doi:10.1016/ j.datak.2007.10.008 Including Special Section: Privacy Aspects of Data Mining Workshop (2006) - Five invited and extended papers
2008
-
[54]
Shayan Talaei, Meijin Li, Kanu Grover, James Kent Hippler, Diyi Yang, and Amin Saberi. 2025. StorySage: Conversational Autobiography Writing Powered by a Multi-Agent Framework. InProceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST ’25). Association for Computing Machinery, New York, NY, USA, Article 209, 26 pages. ...
-
[55]
JiaweiWang,RenheJiang,ChuangYang,ZengqingWu,MakotoOnizuka,Ryosuke Shibasaki, Noboru Koshizuka, and Chuan Xiao. 2024. Large Language Models as Urban Residents: An LLM Agent Framework for Personal Mobility Generation. In Advances in Neural Information Processing Systems, A. Globerson, L. Mackey, D. Belgrave, A. Fan, U. Paquet, J. Tomczak, and C. Zhang (Eds....
-
[56]
Asurveyonlargelanguagemodelbasedautonomousagents
Lei Wang, Chen Ma, Xueyang Feng, Zeyu Zhang, Hao Yang, Jingsen Zhang, Zhiyuan Chen, Jiakai Tang, Xu Chen, Yankai Lin, Wayne Xin Zhao, Zhewei Wei, andJirongWen.2024. Asurveyonlargelanguagemodelbasedautonomousagents. Frontiers of Computer Science18, 6 (March 2024), 186345. doi:10.1007/s11704- 024-40231-1
-
[57]
Ruhan Wang, Shuowen Li, Peiran Zhang, Danqi Huang, Yijie Guo, and Haipeng Mi. 2025. PuppetLine: An Interactive System for Embodied Storytelling with LLM-driven Swarm Robots. InAdjunct Proceedings of the 38th Annual ACM Symposium on User Interface Software and Technology (UIST Adjunct ’25). Association for Computing Machinery, New York, NY, USA, Article 48...
-
[58]
Hui Xi, Seungho Lee, and Young-Jun Son. 2011.An Integrated Pedestrian Behavior Model Based on Extended Decision Field Theory and Social Force Model. Springer London, London, 69–95. doi:10.1007/978-0-85729-883-6_4
-
[59]
Claudia Yamu, Akkelies van Nes, and Chiara Garau. 2021. Bill Hillier’s Legacy: Space Syntax—A Synopsis of Basic Concepts, Measures, and Empirical Applica- tion.Sustainability13, 6 (2021). doi:10.3390/su13063394
- [60]
-
[61]
SeMiTri:aframeworkforsemanticannotationofheterogeneous trajectories
Zhixian Yan, Dipanjan Chakraborty, Christine Parent, Stefano Spaccapietra, and KarlAberer.2011. SeMiTri:aframeworkforsemanticannotationofheterogeneous trajectories. InProceedings of the 14th International Conference on Extending Database Technology(Uppsala, Sweden)(EDBT/ICDT ’11). Association for Computing Machinery, New York, NY, USA, 259–270. doi:10.114...
-
[62]
Shanwen Yang, Tianrui Li, Xun Gong, Bo Peng, and Jie Hu. 2020. A review on crowd simulation and modeling.Graphical Models111 (2020), 101081. doi:10.1016/j.gmod.2020.101081
-
[63]
Josh Jia-Ching Ying, Wang-Chien Lee, Tz-Chiao Weng, and Vincent S. Tseng
-
[64]
Semantic trajectory mining for location prediction. InProceedings of the 19th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems(Chicago, Illinois)(GIS ’11). Association for Computing Machinery, New York, NY, USA, 34–43. doi:10.1145/2093973.2093980
-
[65]
JoshJia-ChingYing,EricHsueh-ChanLu,Wang-ChienLee,Tz-ChiaoWeng,and Vincent S. Tseng. 2010. Mining user similarity from semantic trajectories. InPro- ceedingsofthe2ndACMSIGSPATIALInternationalWorkshoponLocationBased Social Networks(San Jose, California)(LBSN ’10). Association for Computing Machinery, New York, NY, USA, 19–26. doi:10.1145/1867699.1867703
-
[66]
Ryo Yonetani, Jun Baba, and Yasutaka Furukawa. 2024. RetailOpt: Opt-In, Easy-to-Deploy Trajectory Estimation from Smartphone Motion Data and Retail Facility Information. InProceedings of the 2024 ACM International Symposium on Wearable Computers(Melbourne VIC, Australia)(ISWC ’24). Association for Computing Machinery, New York, NY, USA, 125–132. doi:10.11...
-
[67]
Hanzhong Zhang, Jibin Yin, Mulin Jiang, and Cong Su. 2025. Can Agents Spontaneously Form a Society? Introducing a Novel Architecture for Generative Multi-Agents to Elicit Social Emergence. InAdjunct Proceedings of the 38th AnnualACMSymposiumonUserInterfaceSoftwareandTechnology(UISTAdjunct ’25). Association for Computing Machinery, New York, NY, USA, Artic...
-
[68]
Zhishuai Zhang, Jiyang Gao, Junhua Mao, Yukai Liu, Dragomir Anguelov, and Congcong Li. 2020. STINet: Spatio-Temporal-Interactive Network for Pedestrian Detection and Trajectory Prediction. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). SenseWalk: Agent-Based Semantic Trajectory Simulation Powered by Large Langu...
2020
-
[69]
Yi Zuo, Junhao Jiang, and Katsutoshi Yada. 2025. Application of hybrid gate recurrent unit for in-store trajectory prediction based on indoor location system. Scientific Reports15, 1 (Jan. 2025), 1055. doi:10.1038/s41598-024-84599-3 Publisher: Nature Publishing Group
-
[70]
Marta Šveb Dragija, Martijn van Zomeren, and Nina Hansen. 2024. De- signing museum experiences for eudaimonic or hedonic well-being: insights from interviews with museum visitors.Museum Management and Curator- ship0, 0 (2024), 1–18. arXiv:https://doi.org/10.1080/09647775.2024.2408239 doi:10.1080/09647775.2024.2408239 A Preliminary Study Table 1 shows the ...
-
[71]
A JSON-formatted exhibition map
-
[72]
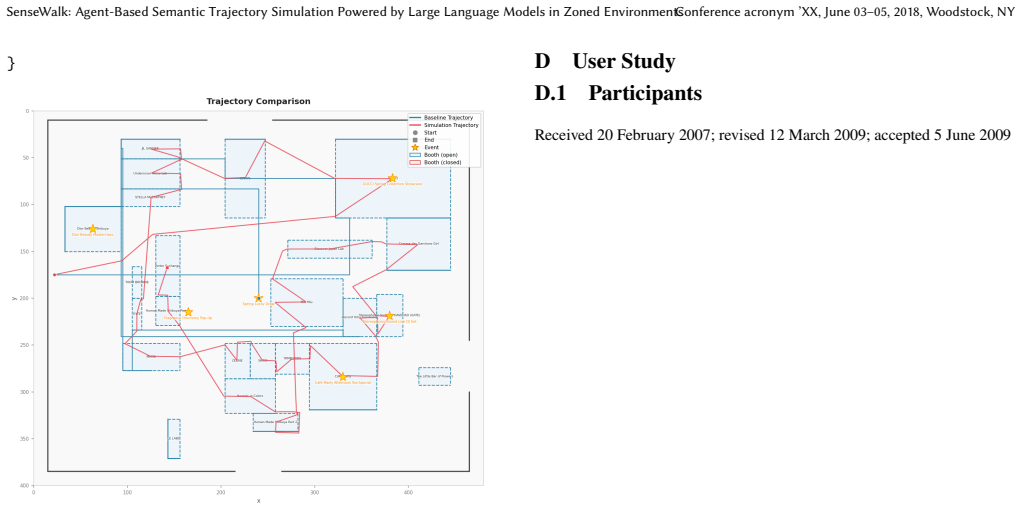
far left→far right→far left again
A user's navigation request Your goal: Within the user's available time, plan a visit order that allows them to see as many booths as possible, based on the map data. ## 1. Coordinate System - The map is a 2D plane. ## 2. JSON Field Description - Booth name (unique identifier) -`pos`: [x, y, w, h]→booth position and size -`des`: booth description -`Countr...
2018
-
[73]
PLAN: Decide which POIs/events this visitor should go to, in what order, and for how long
-
[74]
You must output a single JSON document capturing both the high-level visit plan and the detailed physical trajectory
SIMULATE: Generate realistic physical movement trajectories through the venue space. You must output a single JSON document capturing both the high-level visit plan and the detailed physical trajectory. ## COORDINATE SYSTEM - Origin (0,0) is top-left. X increases rightward, Y increases downward. - Walls are hard boundaries - the agent CANNOT pass through ...
-
[75]
All walking segments must obey this
WALKING SPEED is exactly 1 unit / 3 seconds (5 units / 15 seconds). All walking segments must obey this
-
[76]
Never change both X and Y in a single segment
AXIS-ALIGNED MOTION ONLY: Between any two consecutive walking points, at most ONE coordinate (X or Y) may change. Never change both X and Y in a single segment
-
[77]
b) At every TURN (corner): where the direction changes (e.g., from moving along X to moving along Y)
WHEN TO OUTPUT A POINT (walking): a) At the START of the trajectory (initial position). b) At every TURN (corner): where the direction changes (e.g., from moving along X to moving along Y). Output the corner point BEFORE the direction changes. c) When current_destination CHANGES (the agent starts heading to a new place). Conference acronym ’XX, June 03–05...
2018
-
[78]
browsing
BROWSING / ATTENDING (Time Jump): - One point on ARRIVAL (action="browsing" or "attending"). - Next point is DEPARTURE after the stay (action="walking", with new current_destination). Time jumps forward by stay duration (>=15 min for stores, full duration for events). ## OUTPUT FORMAT Return ONLY valid JSON: {{ "agent_summary": {{ ... }}, "visit_plan": [ ...
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.