Hybrid-Learning approach toward situation recognition and handling
Pith reviewed 2026-05-25 17:21 UTC · model grok-4.3
The pith
A hybrid method pairing situation templates with decision trees raises precision in detecting dynamic situations involving living agents.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
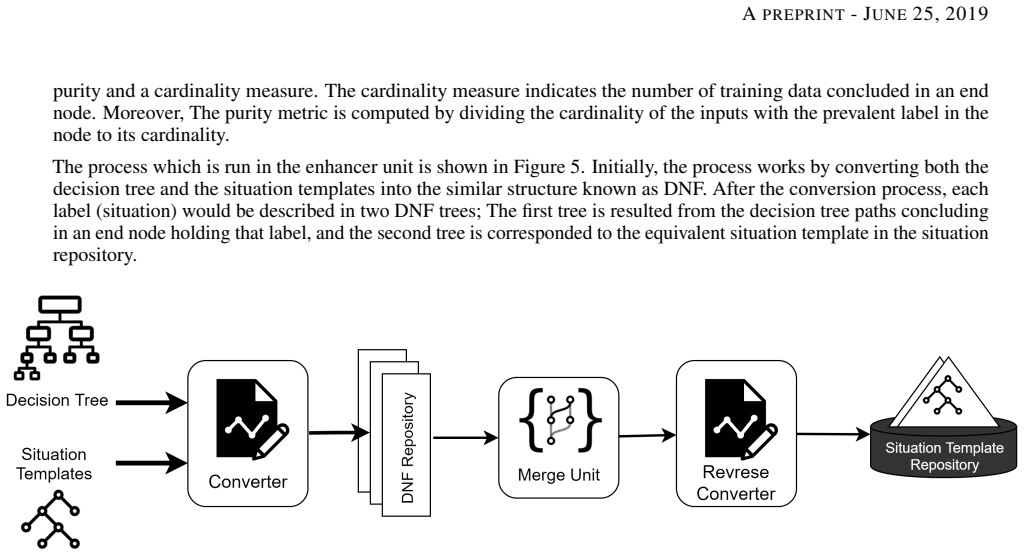
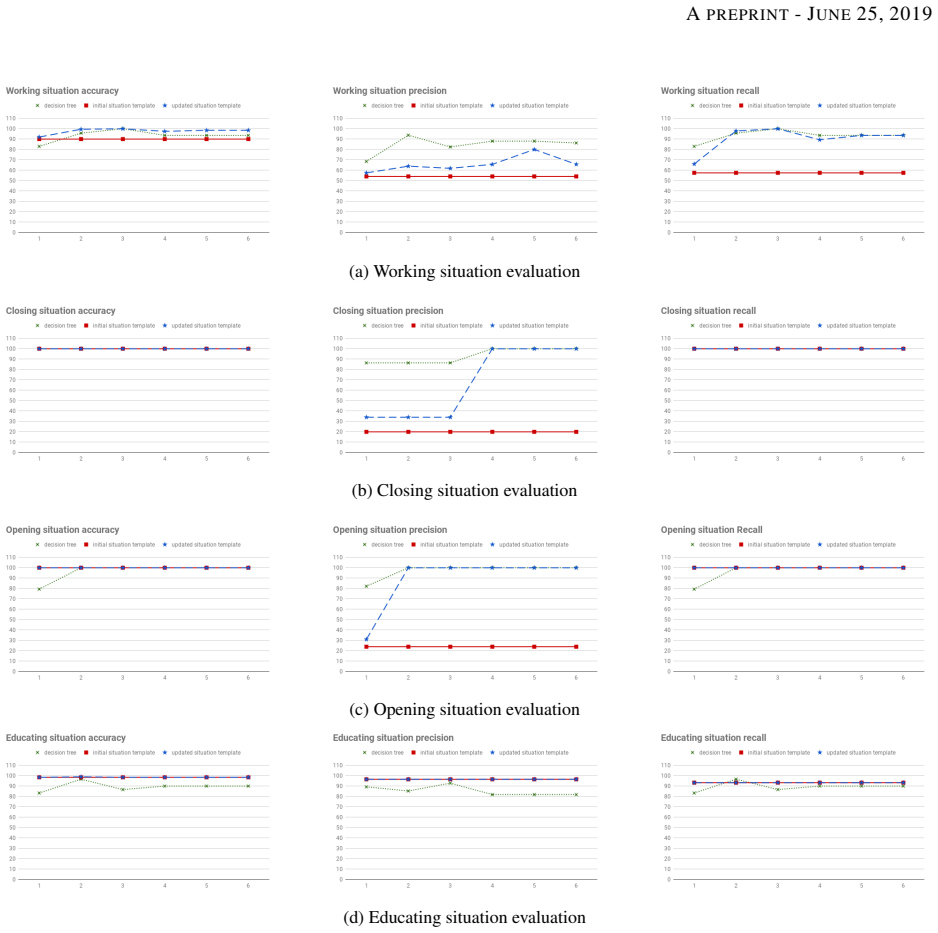
The authors establish that using situation templates jointly with a decision tree within a hybrid machine-learning and semantic-reasoning framework allows the system to adapt its knowledge to the environment, yielding better precision in detecting situations in an ongoing setting that involves living agents while capturing its dynamic nature, as demonstrated through simulation.
What carries the argument
Situation templates used jointly with a decision tree to adapt the system knowledge to the environment.
If this is right
- The hybrid architecture enables the system to incorporate user feedback and environmental changes for improved sensor interpretation.
- Situation detection precision increases in simulated ongoing environments that contain living agents.
- The approach captures the dynamic nature of the setting rather than treating it as static.
- Responses to circumstances can be offered by actuators with greater reliability once the templates and tree have adapted.
Where Pith is reading between the lines
- If the simulation results transfer, real-world smart environments could reduce manual rule updates by letting the decision tree refine the templates over time.
- The same joint mechanism might apply to other sensor-driven domains where both learned patterns and explicit situation knowledge are available.
- Future tests could replace the simulation with physical deployments to check whether the precision gain holds outside controlled conditions.
Load-bearing premise
The simulation accurately models the dynamic behavior of real environments with living agents and that any measured precision gain comes from the hybrid architecture rather than from simulation-specific choices or unstated baseline weaknesses.
What would settle it
Running the hybrid method and non-hybrid baselines side-by-side in a physical smart environment with real living agents and measuring whether the precision advantage persists over time.
Figures
read the original abstract
The success of smart environments largely depends on their smartness of understanding the environments' ongoing situations. Accordingly, this task is an essence to smart environment central processors. Obtaining knowledge from the environment is often through sensors, and the response to a particular circumstance is offered by actuators. This can be improved by getting user feedback, and capturing environmental changes. Machine learning techniques and semantic reasoning tools are widely used in this area to accomplish the goal of interpretation. In this paper, we have proposed a hybrid approach utilizing both machine learning and semantic reasoning tools to derive a better understanding from sensors. This method uses situation templates jointly with a decision tree to adapt the system knowledge to the environment. To test this approach we have used a simulation process which has resulted in a better precision for detecting situations in an ongoing environment involving living agents while capturing its dynamic nature.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a hybrid approach to situation recognition in smart environments that combines semantic situation templates with decision-tree machine learning to adapt system knowledge to dynamic conditions involving living agents. The central claim is that this hybrid method, when evaluated in simulation, yields improved precision over alternatives while capturing environmental dynamics.
Significance. If the simulation-based precision gains prove robust and generalizable, the work could advance hybrid symbolic-statistical methods for context-aware systems. The integration of templates and decision trees is a plausible direction, but the complete absence of quantitative metrics, baselines, or fidelity validation in the reported evaluation substantially reduces the result's current significance.
major comments (3)
- [Abstract] Abstract: the claim that the simulation 'has resulted in a better precision' supplies no numerical values, baseline algorithms, error bars, dataset size, or exclusion criteria, so the empirical support for the central claim cannot be assessed.
- [Simulation section] Simulation/results description: no quantitative checks are described that would establish the simulator reproduces the statistical properties of real sensor streams or living-agent behavior (e.g., distribution matching on traces or Kolmogorov-Smirnov tests); without such evidence the reported precision gain cannot be attributed to the hybrid architecture rather than simulation-specific artifacts.
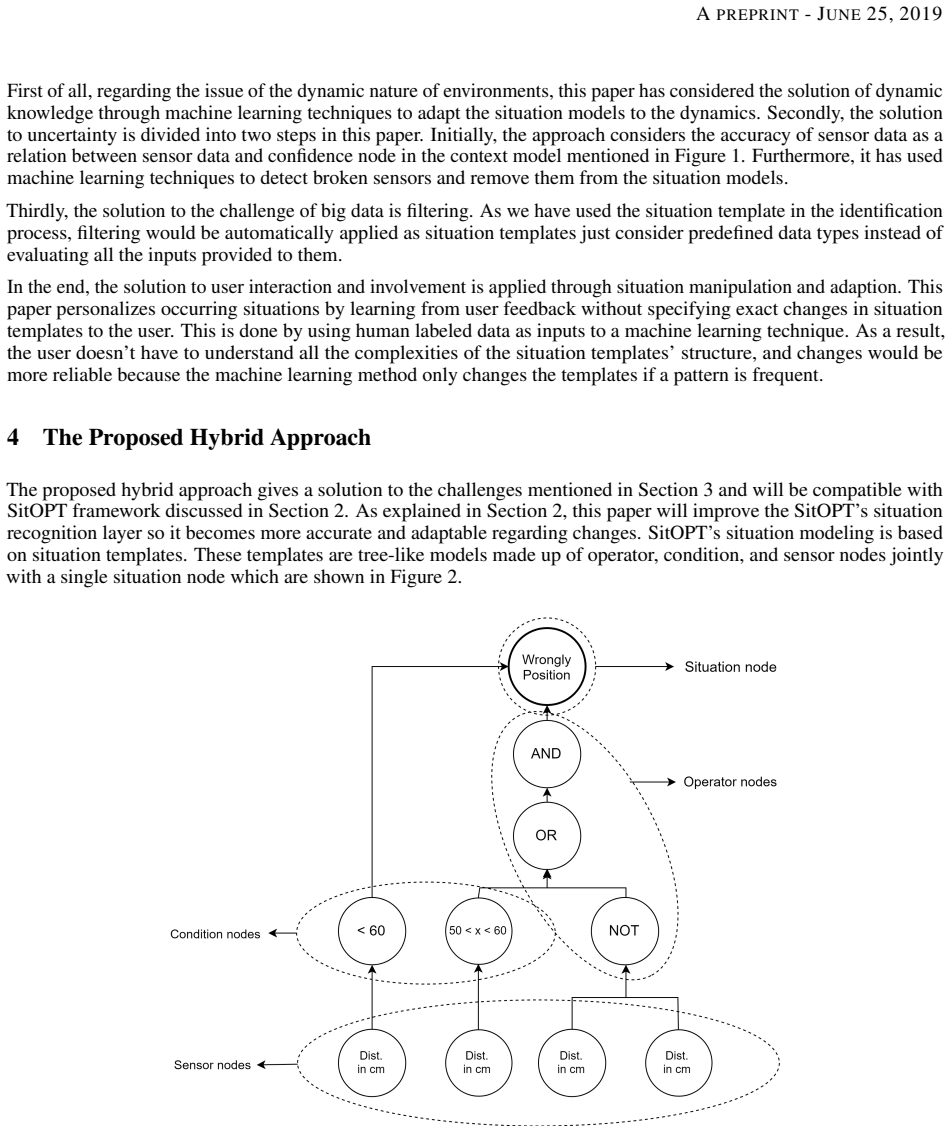
- [Proposed approach] Method description: the hybrid architecture is presented only at the level of component names (situation templates + decision tree) with no equations, pseudocode, or parameter settings, making it impossible to determine whether the adaptation mechanism is well-defined or reproducible.
minor comments (1)
- [Abstract] The phrase 'an essence to smart environment central processors' is awkward; consider 'essential for'.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments identify important areas for improvement in clarity and rigor of the evaluation and method description. We will revise the manuscript accordingly to address each point.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the simulation 'has resulted in a better precision' supplies no numerical values, baseline algorithms, error bars, dataset size, or exclusion criteria, so the empirical support for the central claim cannot be assessed.
Authors: We acknowledge that the abstract does not provide specific numerical values or details on the evaluation. The full manuscript contains simulation results demonstrating improved precision, but to strengthen the abstract, we will revise it to include key quantitative findings, such as the precision values achieved, the baseline methods compared, the number of simulation runs, and any relevant dataset or exclusion criteria. This will allow readers to better assess the empirical support. revision: yes
-
Referee: [Simulation section] Simulation/results description: no quantitative checks are described that would establish the simulator reproduces the statistical properties of real sensor streams or living-agent behavior (e.g., distribution matching on traces or Kolmogorov-Smirnov tests); without such evidence the reported precision gain cannot be attributed to the hybrid architecture rather than simulation-specific artifacts.
Authors: The simulation is designed to model dynamic conditions with living agents in smart environments. We agree that additional validation would strengthen the claims. In the revision, we will add a description of the simulator's design principles and any quantitative checks performed to match real-world statistical properties. If specific tests like Kolmogorov-Smirnov were not conducted, we will either include them or explicitly discuss the limitations of the simulation-based evaluation. revision: yes
-
Referee: [Proposed approach] Method description: the hybrid architecture is presented only at the level of component names (situation templates + decision tree) with no equations, pseudocode, or parameter settings, making it impossible to determine whether the adaptation mechanism is well-defined or reproducible.
Authors: The proposed hybrid approach integrates semantic situation templates with decision tree machine learning for adapting to environmental dynamics. To improve reproducibility, we will expand the method section to include equations describing the integration and adaptation process, pseudocode for the hybrid algorithm, and the specific parameter settings used in the decision tree training and template updates during the simulation experiments. revision: yes
Circularity Check
No circularity; empirical simulation claim without derivations or self-referential reductions
full rationale
The paper presents a hybrid method combining situation templates with decision trees for situation recognition in smart environments, evaluated via simulation that reports improved precision. No equations, parameter fits, predictions derived from inputs, or load-bearing self-citations appear. The central claim is an empirical observation from simulation rather than any derivation chain that reduces to its own inputs by construction. This is a standard non-circular outcome for a methodological description paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Internet of things: Challenges and opportunities,
S. C. Mukhopadhyay and N. K. Suryadevara, “Internet of things: Challenges and opportunities,” in Internet of Things. Springer, 2014, pp. 1–17
work page 2014
-
[2]
A core ontology for situation awareness,
C. J. Matheus, M. M. Kokar, and K. Baclawski, “A core ontology for situation awareness,” in Proceedings of the Sixth International Conference on Information Fusion , vol. 1, 2003, pp. 545–552
work page 2003
-
[3]
A multi-agent fuzzy consensus model in a situation awareness framework,
G. D’Aniello, V . Loia, and F. Orciuoli, “A multi-agent fuzzy consensus model in a situation awareness framework,” Applied Soft Computing, vol. 30, pp. 430–440, 2015
work page 2015
-
[4]
Understanding and using context,
A. K. Dey, “Understanding and using context,” Personal and ubiquitous computing, vol. 5, no. 1, pp. 4–7, 2001
work page 2001
-
[5]
Towards a better understanding of context and context-awareness,
G. D. Abowd, A. K. Dey, P. J. Brown, N. Davies, M. Smith, and P. Steggles, “Towards a better understanding of context and context-awareness,” in International symposium on handheld and ubiquitous computing . Springer, 1999, pp. 304–307
work page 1999
-
[6]
Context-aware driver behavior detection system in intelligent transportation systems,
S. Al-Sultan, A. H. Al-Bayatti, and H. Zedan, “Context-aware driver behavior detection system in intelligent transportation systems,” IEEE transactions on vehicular technology , vol. 62, no. 9, pp. 4264–4275, 2013
work page 2013
-
[7]
J. Wan, D. Zhang, S. Zhao, L. T. Yang, and J. Lloret, “Context-aware vehicular cyber-physical systems with cloud support: architecture, challenges, and solutions,” IEEE Communications Magazine, vol. 52, no. 8, pp. 106–113, 2014
work page 2014
-
[8]
Sharing context-aware road and safety information,
J. Santa and A. F. Gomez-Skarmeta, “Sharing context-aware road and safety information,” IEEE Pervasive Computing, vol. 8, no. 3, pp. 58–65, 2009
work page 2009
-
[9]
Context aware advisor for public transportation,
J. C. Ferreira, H. Silva, J. A. Afonso, and J. L. Afonso, “Context aware advisor for public transportation,” IAENG International Journal of Computer Science , no. 1, pp. 74–81, 2018
work page 2018
-
[10]
Small cells in the forthcoming 5g/iot: Traffic modeling and deployment overview,
F. Al-Turjman, E. Ever, and H. Zahmatkesh, “Small cells in the forthcoming 5g/iot: Traffic modeling and deployment overview,” in Smart Things and Femtocells. CRC Press, 2018, pp. 17–82
work page 2018
-
[11]
Adaptive and context-aware service composition for iot-based smart cities,
A. Urbieta, A. González-Beltrán, S. B. Mokhtar, M. A. Hossain, and L. Capra, “Adaptive and context-aware service composition for iot-based smart cities,” Future Generation Computer Systems, vol. 76, pp. 262–274, 2017
work page 2017
-
[12]
Edge computing for smart health: Context-aware approaches, opportunities, and challenges,
A. A. Abdellatif, A. Mohamed, C. F. Chiasserini, M. Tlili, and A. Erbad, “Edge computing for smart health: Context-aware approaches, opportunities, and challenges,” IEEE Network, 2019
work page 2019
-
[13]
M. M. Aborokbah, S. Al-Mutairi, A. K. Sangaiah, and O. W. Samuel, “Adaptive context aware decision computing paradigm for intensive health care delivery in smart cities—a case analysis,” Sustainable cities and society, vol. 41, pp. 919–924, 2018
work page 2018
-
[14]
Smart healthcare in the iot era: A context-aware recommendation example,
F. Casino, C. Patsakis, E. Batista, O. Postolache, A. Martínez-Ballesté, and A. Solanas, “Smart healthcare in the iot era: A context-aware recommendation example,” in 2018 International Symposium in Sensing and Instrumentation in IoT Era (ISSI) . IEEE, 2018, pp. 1–4
work page 2018
-
[15]
Context-sensitive access in industrial internet of things (iiot) healthcare applications,
F. Al-Turjman and S. Alturjman, “Context-sensitive access in industrial internet of things (iiot) healthcare applications,” IEEE Transactions on Industrial Informatics , vol. 14, no. 6, pp. 2736–2744, 2018. 13 A PREPRINT - J UNE 25, 2019
work page 2018
-
[16]
Enriching a situation awareness framework for iot with knowledge base and reasoning components,
N. Kolbe, A. Zaslavsky, S. Kubler, J. Robert, and Y . Le Traon, “Enriching a situation awareness framework for iot with knowledge base and reasoning components,” in International and Interdisciplinary Conference on Modeling and Using Context. Springer, 2017, pp. 41–54
work page 2017
-
[17]
Measurement of situation awareness in dynamic systems,
M. R. Endsley, “Measurement of situation awareness in dynamic systems,” Human factors, vol. 37, no. 1, pp. 65–84, 1995
work page 1995
-
[18]
Situation identification techniques in pervasive computing: A review,
J. Ye, S. Dobson, and S. McKeever, “Situation identification techniques in pervasive computing: A review,” Pervasive and mobile computing, vol. 8, no. 1, pp. 36–66, 2012
work page 2012
-
[19]
P. Hirmer, M. Wieland, H. Schwarz, B. Mitschang, U. Breitenbücher, S. G. Sáez, and F. Leymann, “Situation recognition and handling based on executing situation templates and situation-aware workflows,” Computing, vol. 99, no. 2, pp. 163–181, 2017
work page 2017
-
[20]
K. Yang, J. Wang, L. Bao, M. Ding, J. Wang, and Y . Wang, “Towards future situation-awareness: A conceptual middleware framework for opportunistic situation identification,” inProceedings of the 12th ACM Symposium on QoS and Security for Wireless and Mobile Networks . ACM, 2016, pp. 95–101
work page 2016
-
[21]
J.-Y . Yang, J.-S. Wang, and Y .-P. Chen, “Using acceleration measurements for activity recognition: An effective learning algorithm for constructing neural classifiers,” Pattern recognition letters, vol. 29, no. 16, pp. 2213–2220, 2008
work page 2008
-
[22]
Bayesian approach to sensor-based context awareness,
P. Korpipää, M. Koskinen, J. Peltola, S.-M. Mäkelä, and T. Seppänen, “Bayesian approach to sensor-based context awareness,” Personal and Ubiquitous Computing, vol. 7, no. 2, pp. 113–124, 2003
work page 2003
-
[23]
Situation awareness in ambient assisted living for smart healthcare,
M. N. Alkhomsan, M. A. Hossain, S. M. M. Rahman, and M. Masud, “Situation awareness in ambient assisted living for smart healthcare,” IEEE Access, vol. 5, pp. 20 716–20 725, 2017
work page 2017
-
[24]
Situation awareness in a smart home environment,
S.-Y . Lee and F. J. Lin, “Situation awareness in a smart home environment,” inInternet of Things (WF-IoT), 2016 IEEE 3rd World F orum on. IEEE, 2016, pp. 678–683
work page 2016
-
[25]
A long-term evaluation of sensing modalities for activity recognition,
B. Logan, J. Healey, M. Philipose, E. M. Tapia, and S. Intille, “A long-term evaluation of sensing modalities for activity recognition,” in International conference on Ubiquitous computing . Springer, 2007, pp. 483–500
work page 2007
-
[26]
Hidden markov model as a framework for situational awareness,
T. Damarla, “Hidden markov model as a framework for situational awareness,” in Information Fusion, 2008 11th International Conference on. IEEE, 2008, pp. 1–7
work page 2008
-
[27]
T. Kanda, D. F. Glas, M. Shiomi, H. Ishiguro, and N. Hagita, “Who will be the customer?: A social robot that anticipates people’s behavior from their trajectories,” in Proceedings of the 10th international conference on Ubiquitous computing. ACM, 2008, pp. 380–389
work page 2008
-
[28]
Barwise, The situation in logic
J. Barwise, The situation in logic . Center for the Study of Language (CSLI), 1989, no. 17
work page 1989
-
[29]
A translation approach to portable ontology specifications,
T. R. Gruber, “A translation approach to portable ontology specifications,”Knowledge acquisition, vol. 5, no. 2, pp. 199–220, 1993
work page 1993
-
[30]
Semantic smart homes: towards knowledge rich assisted living environments,
L. Chen, C. Nugent, M. Mulvenna, D. Finlay, and X. Hong, “Semantic smart homes: towards knowledge rich assisted living environments,” in Intelligent Patient Management. Springer, 2009, pp. 279–296
work page 2009
-
[31]
Iot based situational awareness framework for real-time project management,
S. Ghimire, F. Luis-Ferreira, T. Nodehi, and R. Jardim-Goncalves, “Iot based situational awareness framework for real-time project management,” International Journal of Computer Integrated Manufacturing , vol. 30, no. 1, pp. 74–83, 2017
work page 2017
-
[32]
Generic application driven situation awareness via ontological situation recognition,
R. Pearson, M. P. Donnelly, J. Liu, and L. Galway, “Generic application driven situation awareness via ontological situation recognition,” in Cognitive Methods in Situation Awareness and Decision Support (CogSIMA), 2016 IEEE International Multi-Disciplinary Conference on. IEEE, 2016, pp. 131–137
work page 2016
-
[33]
Reactive, proactive, and extensible situation-awareness in ambient assisted living,
A. Machado, V . Maran, I. Augustin, L. K. Wives, and J. P. M. de Oliveira, “Reactive, proactive, and extensible situation-awareness in ambient assisted living,” Expert Systems with Applications , vol. 76, pp. 21–35, 2017
work page 2017
-
[34]
Situation model as interface between situation recognition and situation-aware applications,
M. Mormul, P. Hirmer, M. Wieland, and B. Mitschang, “Situation model as interface between situation recognition and situation-aware applications,” Computer Science-Research and Development, vol. 32, no. 3-4, pp. 331–342, 2017
work page 2017
-
[35]
Sitrs-a situation recognition service based on modeling and executing situation templates,
P. Hirmer, M. Wieland, H. Schwarz, B. Mitschang, U. Breitenbücher, and F. Leymann, “Sitrs-a situation recognition service based on modeling and executing situation templates,” in Proceedings of the 9th symposium and summer school on service-oriented computing , 2015, pp. 113–127
work page 2015
-
[36]
Sitrs xt-towards near real time situation recognition,
A. C. F. da Silva, P. Hirmer, M. Wieland, and B. Mitschang, “Sitrs xt-towards near real time situation recognition,” Journal of Information and Data Management , vol. 7, no. 1, p. 4, 2016
work page 2016
-
[37]
Ambient intelligence: Technologies, applications, and opportunities,
D. J. Cook, J. C. Augusto, and V . R. Jakkula, “Ambient intelligence: Technologies, applications, and opportunities,” Pervasive and Mobile Computing, vol. 5, no. 4, pp. 277–298, 2009. 14 A PREPRINT - J UNE 25, 2019
work page 2009
-
[38]
Reasoning about uncertain contexts in pervasive computing environments,
A. Ranganathan, J. Al-Muhtadi, and R. H. Campbell, “Reasoning about uncertain contexts in pervasive computing environments,” IEEE Pervasive computing, vol. 3, no. 2, pp. 62–70, 2004
work page 2004
-
[39]
Automatic drive train management system for 4wd vehicle based on road situation identification,
M. Ke, B. Zhu, J. Zhao, and W. Deng, “Automatic drive train management system for 4wd vehicle based on road situation identification,” SAE Technical Paper, Tech. Rep., 2018
work page 2018
-
[40]
Supervised learning algorithm for automatic adaption of situation templates using uncertain data,
O. Zweigle, K. Häussermann, U.-P. Käppeler, and P. Levi, “Supervised learning algorithm for automatic adaption of situation templates using uncertain data,” in Proceedings of the 2nd International Conference on Interaction Sciences: Information Technology, Culture and Human. ACM, 2009, pp. 197–200
work page 2009
-
[41]
Context-aware hybrid reasoning framework for pervasive healthcare,
B. Yuan and J. Herbert, “Context-aware hybrid reasoning framework for pervasive healthcare,” Personal and ubiquitous computing, vol. 18, no. 4, pp. 865–881, 2014
work page 2014
-
[42]
Augmented ontology by handshaking with machine learning,
M. Kim, H. Kang, S. Kwon, Y . Lee, K. Kim, and C. S. Pyo, “Augmented ontology by handshaking with machine learning,” in Advanced Communication Technology (ICACT), 2017 19th International Conference on . IEEE, 2017, pp. 740–743
work page 2017
-
[43]
Internet of things: perspectives, challenges and opportunities,
A. M. Alberti and D. Singh, “Internet of things: perspectives, challenges and opportunities,” in International Workshop on Telecommunications (IWT 2013), 2013, pp. 1–6
work page 2013
-
[44]
Context aware framework in iot: a survey,
S. Sukode, S. Gite, and H. Agrawal, “Context aware framework in iot: a survey,” International Journal, vol. 4, no. 1, 2015
work page 2015
-
[45]
A survey of decision tree classifier methodology,
S. R. Safavian and D. Landgrebe, “A survey of decision tree classifier methodology,”IEEE transactions on systems, man, and cybernetics, vol. 21, no. 3, pp. 660–674, 1991
work page 1991
-
[46]
C4. 5: Programming for machine learning,
J. R. Quinlan, “C4. 5: Programming for machine learning,” Morgan Kauffmann, vol. 38, p. 48, 1993. 15
work page 1993
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.