SatSplat: Geometrically-Accurate Gaussian Splatting for Satellite Imagery
Pith reviewed 2026-06-30 00:55 UTC · model grok-4.3
The pith
SatSplat adapts 2D Gaussian splatting to satellite imagery with an affine camera model and learned pose deltas for accurate 3D reconstruction.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
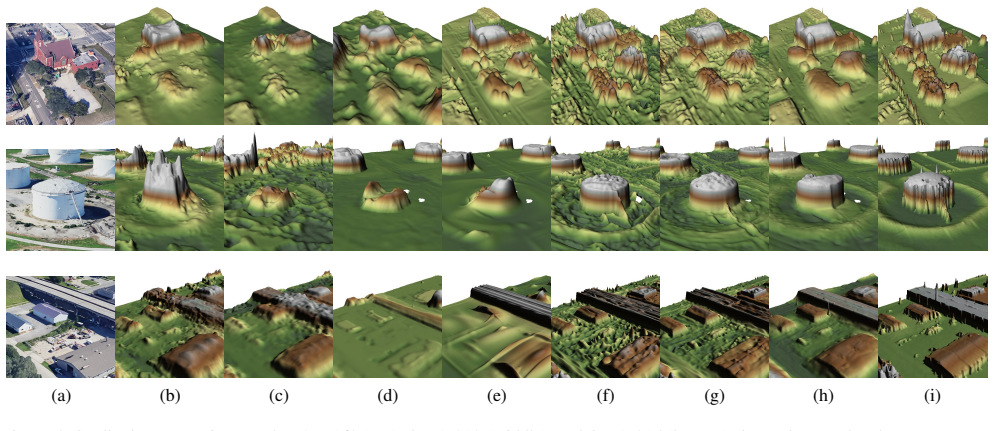
SatSplat is the first framework to adapt 2D Gaussian Splatting to satellite photogrammetry with online camera adjustment. It approximates satellite cameras with an affine model and learns a minimal delta parameterization for in-splat camera refinement from dense observations, implemented inside a 2DGS scene representation. Geometric shadow mapping and per-camera color correction are integrated during training to address time-varying shadows and illumination changes. On the evaluated DFC2019 and IARPA2016 benchmark sites the approach delivers stronger geometric accuracy than prior 3DGS-based baselines while cutting mean absolute error by 11.93 percent and peak video memory by 31 percent on th
What carries the argument
Affine camera model with learned minimal delta parameterization for in-splat camera refinement inside a 2D Gaussian Splatting scene representation.
If this is right
- Reduces mean absolute error by 11.93 percent on the processed DFC2019 benchmark relative to the previous state of the art.
- Lowers peak video memory usage by 31 percent compared with earlier 3DGS-based satellite methods.
- Outperforms prior 3DGS adaptations on both DFC2019 and IARPA2016 benchmark sites while maintaining geometric fidelity.
- Enables large-scale digital surface modeling from multi-date satellite collections with practical computational efficiency.
Where Pith is reading between the lines
- The same affine-plus-delta refinement could be tested on other high-altitude multi-view datasets that share small intersection angles.
- Switching to 2D rather than 3D splats may offer a general memory advantage for imagery captured from very distant viewpoints.
- The shadow-mapping and color-correction modules could be isolated and measured to quantify how much each contributes to the reported accuracy gain.
Load-bearing premise
The affine camera model plus a learned minimal delta parameterization can correct satellite camera poses from dense observations without introducing geometric distortion or overfitting to the training views.
What would settle it
Running the method on held-out satellite imagery from the same sites and observing either visible surface distortions in the output meshes or no reduction in mean absolute error relative to a fixed-pose 2DGS baseline.
Figures
read the original abstract
High-resolution satellite imagery demands 3D reconstruction methods that deliver both speed and geometric accuracy. Recent adaptations of 3D Gaussian Splatting (3DGS) to satellite imagery demonstrate strong efficiency, but reconstruction quality often degrades under diverse illumination across multi-date, high-altitude acquisitions (with small intersection angles), limiting applicability to remote sensing and vision tasks. We present SatSplat, the first framework to adapt 2D Gaussian Splatting (2DGS) to satellite photogrammetry, with online camera adjustment. We approximate satellite cameras with an affine model and learn a minimal delta parameterization for in-splat camera refinement from dense observations. The formulation is implemented with a 2DGS scene representation. To handle time-varying shadows and illumination changes, we integrate geometric shadow mapping and per-camera color correction during training. Across the evaluated DFC2019 and IARPA2016 benchmark sites, SatSplat achieves strong geometric accuracy while significantly outperforming prior 3DGS-based baselines. On our processed DFC2019 benchmark, SatSplat reduces mean absolute error by 11.93% and peak video memory by 31% relative to the previous state of the art. Our approach enables large-scale digital surface modeling with practical computational efficiency. The project page is available at https://gdaosu.github.io/satsplat/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. SatSplat adapts 2D Gaussian Splatting to satellite imagery by approximating cameras with an affine model and learning a minimal delta parameterization for online refinement from dense observations. It incorporates geometric shadow mapping and per-camera color correction to address time-varying illumination, and reports 11.93% lower mean absolute error and 31% lower peak video memory than prior 3DGS baselines on a processed DFC2019 benchmark (with similar gains claimed on IARPA2016).
Significance. If the geometric-accuracy claims hold under independent validation, the method would provide a practical efficiency gain for large-scale satellite DSM generation while addressing illumination and pose issues that degrade standard 3DGS adaptations; the use of external public benchmarks rather than self-defined metrics is a positive feature.
major comments (2)
- [Method / camera refinement formulation] The central claim that the affine camera model plus learned minimal delta parameterization produces undistorted metric geometry rests on an unvalidated assumption. No explicit check is provided (e.g., residual comparison against independent RPC bundle adjustment, magnitude statistics on the learned deltas, or held-out view cross-validation) that the deltas remain small and do not overfit training views, which is load-bearing for the reported 11.93% MAE reduction given the small intersection angles typical of satellite data.
- [Experiments / ablation studies] The abstract states that the formulation is implemented with a 2DGS scene representation, yet no ablation isolates the contribution of the 2DGS choice versus the affine+delta refinement or the shadow-mapping component; without this, it is unclear whether the geometric gains are attributable to the novel parameterization or to other implementation details.
minor comments (2)
- [Experiments] The phrase "our processed DFC2019 benchmark" should be accompanied by a precise description of the preprocessing steps and any differences from the public release, ideally in a dedicated data section or supplementary table.
- [Method] Notation for the delta parameterization (e.g., how many degrees of freedom per camera, any regularization terms) should be introduced with an equation number and a short table of symbols for clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and indicate the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Method / camera refinement formulation] The central claim that the affine camera model plus learned minimal delta parameterization produces undistorted metric geometry rests on an unvalidated assumption. No explicit check is provided (e.g., residual comparison against independent RPC bundle adjustment, magnitude statistics on the learned deltas, or held-out view cross-validation) that the deltas remain small and do not overfit training views, which is load-bearing for the reported 11.93% MAE reduction given the small intersection angles typical of satellite data.
Authors: We agree that explicit validation of the learned deltas would strengthen the geometric claims. The current manuscript reports end-to-end MAE improvements on public benchmarks but does not include magnitude statistics, residual comparisons to RPC bundle adjustment, or held-out cross-validation for the deltas. In the revision we will add these analyses, reporting delta magnitude distributions and held-out view results to confirm the parameters remain small and do not overfit. revision: yes
-
Referee: [Experiments / ablation studies] The abstract states that the formulation is implemented with a 2DGS scene representation, yet no ablation isolates the contribution of the 2DGS choice versus the affine+delta refinement or the shadow-mapping component; without this, it is unclear whether the geometric gains are attributable to the novel parameterization or to other implementation details.
Authors: We acknowledge that dedicated ablations would clarify the source of the reported gains. The manuscript presents the combined system but does not isolate the 2DGS representation from the affine+delta camera model or the shadow-mapping component. We will add ablation experiments in the revision, evaluating MAE and memory on the DFC2019 benchmark for variants with and without each element. revision: yes
Circularity Check
No significant circularity; evaluation uses external public benchmarks
full rationale
The paper reports quantitative gains (11.93% MAE reduction, 31% memory) on processed DFC2019 and IARPA2016 benchmarks, which are independent public datasets with their own ground truth. The affine camera model plus learned minimal delta is an internal fitting choice whose outputs are then measured against those external references rather than against quantities defined by the fit itself. No self-definitional equations, fitted-input predictions, or load-bearing self-citation chains appear in the abstract or reader context. This is the normal non-circular case.
Axiom & Free-Parameter Ledger
free parameters (1)
- delta parameterization for camera refinement
axioms (1)
- domain assumption Affine camera model is an adequate approximation for satellite cameras
Reference graph
Works this paper leans on
-
[1]
Best practices in evaluating geospatial mapping accuracy according to the new asprs accuracy stan- dards.Photogrammetric Engineering & Remote Sensing, 90 (5), 2024
Qassim Abdullah. Best practices in evaluating geospatial mapping accuracy according to the new asprs accuracy stan- dards.Photogrammetric Engineering & Remote Sensing, 90 (5), 2024
2024
-
[2]
Gaussian splatting for efficient satellite image photogram- metry
Luca Savant Aira, Gabriele Facciolo, and Thibaud Ehret. Gaussian splatting for efficient satellite image photogram- metry. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition (CVPR), pages 5959– 5969, 2025
2025
-
[3]
Fast explicit diffusion for accelerated features in non- linear scale spaces
Pablo Fernández Alcantarilla, Jesús Nuevo, and Adrien Bar- toli. Fast explicit diffusion for accelerated features in non- linear scale spaces. InBritish Machine Vision Conference, BMVC 2013, Bristol, UK, September 9-13, 2013. BMV A Press, 2013
2013
-
[4]
Barron, Ben Mildenhall, Dor Verbin, Pratul P
Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields. InProceedings of the 11 OMA-203 OMA-212 OMA-315 IARPA-001 IARPA-002 IARPA-003 CLS ASP s2p SAT-NGP EOGS Skyfall-1 Skyfall-2 SatSplat Figure S2. Errormap comparison for Omaha (OMA) and IARPA tiles. The errormap...
2022
-
[5]
Beyer, Oleg Alexandrov, and Scott McMichael
Ross A. Beyer, Oleg Alexandrov, and Scott McMichael. The Ames Stereo Pipeline: NASA’s Open Source Software for Deriving and Processing Terrain Data.Earth and Space Sci- ence, 5(9):537–548, 2018
2018
-
[6]
SAT-NGP : Unleashing Neural Graph- ics Primitives for Fast Relightable Transient-Free 3D Recon- struction From Satellite Imagery
Camille Billouard, Dawa Derksen, Emmanuelle Sarrazin, and Bruno Vallet. SAT-NGP : Unleashing Neural Graph- ics Primitives for Fast Relightable Transient-Free 3D Recon- struction From Satellite Imagery. InIGARSS 2024 - 2024 IEEE International Geoscience and Remote Sensing Sympo- sium, pages 8749–8753, 2024
2024
-
[7]
James F. Blinn. A homogeneous formulation for lines in 3 space. InProceedings of the 4th Annual Conference on Com- puter Graphics and Interactive Techniques, pages 237–241, New York, NY , USA, 1977. Association for Computing Ma- chinery
1977
-
[8]
A multiple view stereo benchmark for satellite im- agery
Marc Bosch, Zachary Kurtz, Shea Hagstrom, and Myron Brown. A multiple view stereo benchmark for satellite im- agery. In2016 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), pages 1–9, 2016
2016
-
[9]
Hager, and Myron Brown
Marc Bosch, Kevin Foster, Gordon Christie, Sean Wang, Gregory D. Hager, and Myron Brown. Semantic Stereo for Incidental Satellite Images. In2019 IEEE Winter Conference on Applications of Computer Vision (WACV), pages 1524– 1532, 2019
2019
-
[10]
NeuSG: Neural Implicit Surface Reconstruction with 3D Gaussian Splatting Guidance, 2025
Hanlin Chen, Chen Li, Yunsong Wang, and Gim Hee Lee. NeuSG: Neural Implicit Surface Reconstruction with 3D Gaussian Splatting Guidance, 2025
2025
-
[11]
Building shadow detection based on im- proved quick shift algorithm in gf-2 images.Photogrammet- ric Engineering & Remote Sensing, 90(8), 2024
Yunzhi Chen, Chao Wang, Wei Wang, Xiang Zhang, and Nengcheng Chen. Building shadow detection based on im- proved quick shift algorithm in gf-2 images.Photogrammet- ric Engineering & Remote Sensing, 90(8), 2024
2024
-
[12]
de Franchis, E
C. de Franchis, E. Meinhardt-Llopis, J. Michel, J.-M. Morel, and G. Facciolo. An automatic and modular stereo pipeline for pushbroom images. InISPRS Annals of the Photogram- metry, Remote Sensing and Spatial Information Sciences, pages 49–56, Zurich, Switzerland, 2014. Copernicus GmbH
2014
-
[13]
de Franchis, E
C. de Franchis, E. Meinhardt-Llopis, J. Michel, J.-M. Morel, 12 and G. Facciolo. Automatic sensor orientation refinement of Pléiades stereo images. In2014 IEEE Geoscience and Remote Sensing Symposium, pages 1639–1642, 2014
2014
-
[14]
de Franchis, E
C. de Franchis, E. Meinhardt-Llopis, J. Michel, J.-M. Morel, and G. Facciolo. On stereo-rectification of pushbroom im- ages. In2014 IEEE International Conference on Image Pro- cessing (ICIP), pages 5447–5451, 2014
2014
-
[15]
Shadow Neural Radiance Fields for Multi-View Satellite Photogrammetry
Dawa Derksen and Dario Izzo. Shadow Neural Radiance Fields for Multi-View Satellite Photogrammetry. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1152–1161, 2021
2021
-
[16]
MGM: A Significantly More Global Matching for Stereovi- sion
Gabriele Facciolo, Carlo De Franchis, and Enric Meinhardt. MGM: A Significantly More Global Matching for Stereovi- sion. InBMVC 2015, 2015
2015
-
[17]
SuGaR: Surface- aligned gaussian splatting for efficient 3D mesh reconstruc- tion and high-quality mesh rendering
Antoine Guédon and Vincent Lepetit. SuGaR: Surface- aligned gaussian splatting for efficient 3D mesh reconstruc- tion and high-quality mesh rendering. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 5354–5363, 2024
2024
-
[18]
Stereo Processing by Semiglobal Matching and Mutual Information.IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2):328–341, 2008
Heiko Hirschmuller. Stereo Processing by Semiglobal Matching and Mutual Information.IEEE Transactions on Pattern Analysis and Machine Intelligence, 30(2):328–341, 2008
2008
-
[19]
2D Gaussian Splatting for Geometrically Ac- curate Radiance Fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2D Gaussian Splatting for Geometrically Ac- curate Radiance Fields. InACM SIGGRAPH 2024 Confer- ence Papers, pages 1–11, New York, NY , USA, 2024. Asso- ciation for Computing Machinery
2024
-
[20]
3R-GS: Best Practice in Opti- mizing Camera Poses Along with 3DGS, 2025
Zhisheng Huang, Peng Wang, Jingdong Zhang, Yuan Liu, Xin Li, and Wenping Wang. 3R-GS: Best Practice in Opti- mizing Camera Poses Along with 3DGS, 2025
2025
-
[21]
3D Gaussian Splatting for Real-Time Radiance Field Rendering.ACM Transactions on Graphics, 42(4):139:1–139:14, 2023
Bernhard Kerbl, Georgios Kopanas, Thomas Leimkuehler, and George Drettakis. 3D Gaussian Splatting for Real-Time Radiance Field Rendering.ACM Transactions on Graphics, 42(4):139:1–139:14, 2023
2023
-
[22]
3d gaussian splat- ting as markov chain monte carlo
Shakiba Kheradmand, Daniel Rebain, Gopal Sharma, Wei- wei Sun, Yang-Che Tseng, Hossam Isack, Abhishek Kar, Andrea Tagliasacchi, and Kwang Moo Yi. 3d gaussian splat- ting as markov chain monte carlo. InAdvances in Neural Information Processing Systems (NeurIPS), 2024. Spotlight Presentation
2024
-
[23]
EDGS: Eliminating Densification for Efficient Convergence of 3DGS, 2025
Dmytro Kotovenko, Olga Grebenkova, and Björn Ommer. EDGS: Eliminating Densification for Efficient Convergence of 3DGS, 2025
2025
-
[24]
Wildgaussians: 3d gaussian splatting in the wild
Jonas Kulhanek, Songyou Peng, Zuzana Kukelova, Marc Pollefeys, and Torsten Sattler. Wildgaussians: 3d gaussian splatting in the wild. InAdvances in Neural Information Processing Systems, pages 21271–21288. Curran Associates, Inc., 2024
2024
-
[25]
Skyfall-gs: Synthesizing immersive 3d urban scenes from satellite imagery, 2025
Jie-Ying Lee, Yi-Ruei Liu, Shr-Ruei Tsai, Wei-Cheng Chang, Chung-Ho Wu, Jiewen Chan, Zhenjun Zhao, Chieh Hubert Lin, and Yu-Lun Liu. Skyfall-gs: Synthesizing immersive 3d urban scenes from satellite imagery, 2025
2025
-
[26]
Distinctive image features from scale- invariant keypoints.International journal of computer vi- sion, 60(2):91–110, 2004
David G Lowe. Distinctive image features from scale- invariant keypoints.International journal of computer vi- sion, 60(2):91–110, 2004
2004
-
[27]
A Generic Bundle Adjustment Methodology for Indirect RPC Model Refine- ment of Satellite Imagery.Image Processing On Line, 11: 344–373, 2021
Roger Marí, Carlo de Franchis, Enric Meinhardt-Llopis, Jérémy Anger, and Gabriele Facciolo. A Generic Bundle Adjustment Methodology for Indirect RPC Model Refine- ment of Satellite Imagery.Image Processing On Line, 11: 344–373, 2021
2021
-
[28]
Sat- NeRF: Learning Multi-View Satellite Photogrammetry With Transient Objects and Shadow Modeling Using RPC Cam- eras
Roger Marí, Gabriele Facciolo, and Thibaud Ehret. Sat- NeRF: Learning Multi-View Satellite Photogrammetry With Transient Objects and Shadow Modeling Using RPC Cam- eras. InProceedings of the IEEE/CVF Conference on Com- puter Vision and Pattern Recognition, pages 1311–1321, 2022
2022
-
[29]
Multi- Date Earth Observation NeRF: The Detail Is in the Shadows
Roger Marí, Gabriele Facciolo, and Thibaud Ehret. Multi- Date Earth Observation NeRF: The Detail Is in the Shadows. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 2034–2044, 2023
2034
-
[30]
Nerf in the wild: Neural radiance fields for uncon- strained photo collections
Ricardo Martin-Brualla, Noha Radwan, Mehdi SM Sajjadi, Jonathan T Barron, Alexey Dosovitskiy, and Daniel Duck- worth. Nerf in the wild: Neural radiance fields for uncon- strained photo collections. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 7210–7219, 2021
2021
-
[31]
Nerf: Representing scenes as neural radiance fields for view syn- thesis.Communications of the ACM, 65(1):99–106, 2021
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis.Communications of the ACM, 65(1):99–106, 2021
2021
-
[32]
R. Qin. RPC STEREO PROCESSOR (RSP) – A SOFT- W ARE PACKAGE FOR DIGITAL SURFACE MODEL AND ORTHOPHOTO GENERATION FROM SATELLITE STEREO IMAGERY . InISPRS Annals of Photogramme- try, Remote Sensing and Spatial Information Sciences, pages 77–82, Prague, Czech Republic, 2016
2016
-
[33]
Accuracy assessment of dense point cloud generated by deep learning and semiglobal matching.Photogrammetric Engineering & Remote Sens- ing, 91(3), 2025
Haval AbdulJabbar Sadeq. Accuracy assessment of dense point cloud generated by deep learning and semiglobal matching.Photogrammetric Engineering & Remote Sens- ing, 91(3), 2025
2025
-
[34]
Sat2building: Lod-2 build- ing reconstruction from satellite imagery using spatial em- beddings.Photogrammetric Engineering & Remote Sensing, 91(4), 2025
Philipp Schuegraf, Shengxi Gui, Rongjun Qin, Friedrich Fraundorfer, and Ksenia Bittner. Sat2building: Lod-2 build- ing reconstruction from satellite imagery using spatial em- beddings.Photogrammetric Engineering & Remote Sensing, 91(4), 2025
2025
-
[35]
Shean, Oleg Alexandrov, Zachary M
David E. Shean, Oleg Alexandrov, Zachary M. Moratto, Benjamin E. Smith, Ian R. Joughin, Claire Porter, and Paul Morin. An automated, open-source pipeline for mass pro- duction of digital elevation models (DEMs) from very-high- resolution commercial stereo satellite imagery.ISPRS Jour- nal of Photogrammetry and Remote Sensing, 116:101–117, 2016
2016
-
[36]
Gs-i 3: Gaussian splatting for surface reconstruction from illumination-inconsistent im- ages, 2025
Tengfei Wang, Xin Wang, Yongmao Hou, Zhaoning Zhang, Yiwei Xu, and Zongqian Zhan. Gs-i 3: Gaussian splatting for surface reconstruction from illumination-inconsistent im- ages, 2025
2025
-
[37]
gsplat: An open-source library for gaussian splatting.Journal of Ma- chine Learning Research, 26(34):1–17, 2025
Vickie Ye, Ruilong Li, Justin Kerr, Matias Turkulainen, Brent Yi, Zhuoyang Pan, Otto Seiskari, Jianbo Ye, Jeffrey Hu, Matthew Tancik, and Angjoo Kanazawa. gsplat: An open-source library for gaussian splatting.Journal of Ma- chine Learning Research, 26(34):1–17, 2025. 13
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.