Spatially Stratified Distillation for Heterogeneous Radar Place Recognition
Pith reviewed 2026-06-26 21:32 UTC · model grok-4.3
The pith
Spatially stratified distillation aligns features asymmetrically based on radar return overlap to improve heterogeneous place recognition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
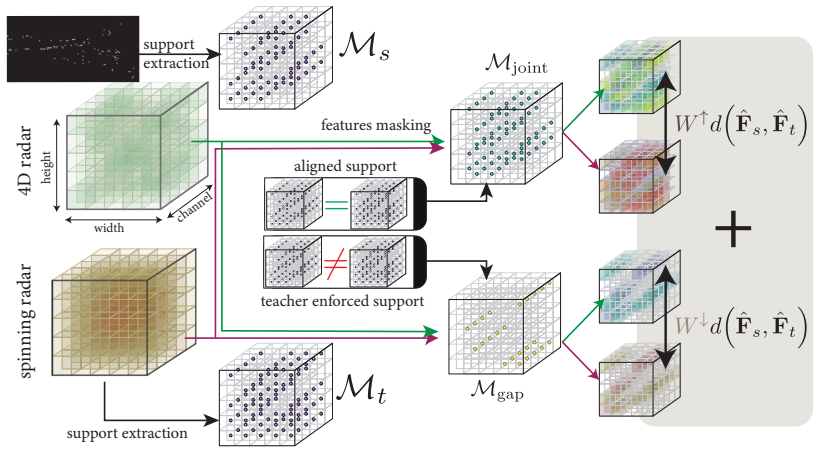
Spatially-stratified distillation replaces uniform distillation with an asymmetric spatial alignment derived directly from physical radar returns: strong feature alignment is enforced in regions of overlapping returns, while heavily discounted distillation weights are applied in sparse regions where the 4D student lacks returns but the teacher contains valid structure within the shared field of view.
What carries the argument
spatially-stratified distillation (SSD): an asymmetric spatial alignment strategy that sets distillation weights according to overlap in physical radar returns.
If this is right
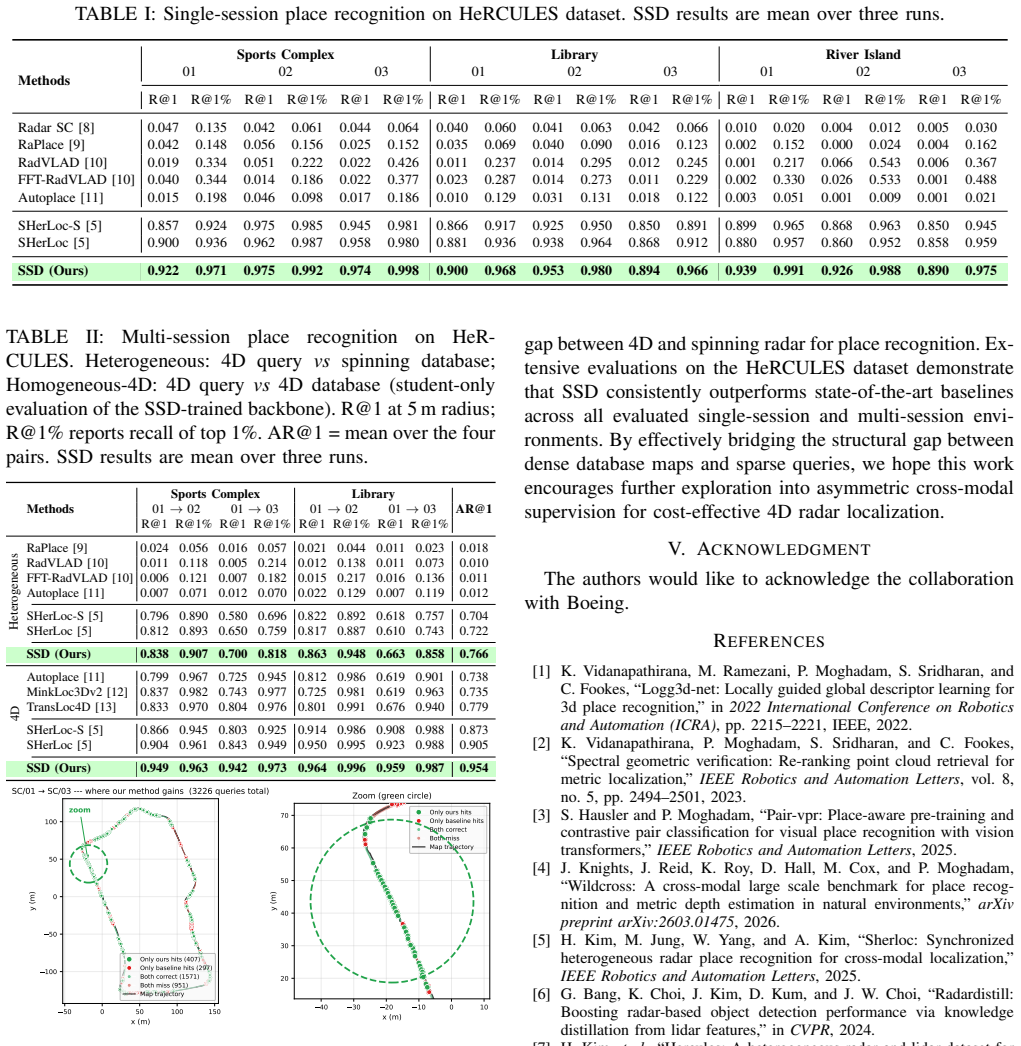
- SSD significantly outperforms prior place recognition methods on the HeRCULES dataset.
- It achieves state-of-the-art results specifically on challenging dynamic sequences.
- The method mitigates the effects of extreme sparsity and narrow field-of-view in 4D radar queries.
- Asymmetric weighting derived from radar returns enables better cross-hardware map matching than uniform projection approaches.
Where Pith is reading between the lines
- The same overlap-based weighting principle could be tested on other heterogeneous sensor pairs such as automotive radar to LiDAR.
- If the assumption about uniform treatment holds, SSD-style stratification might improve distillation in any domain-adaptation setting with partial spatial overlap.
- The method suggests that future radar place recognition benchmarks should explicitly separate performance on dynamic versus static sequences to isolate the benefit of spatial stratification.
Load-bearing premise
That performance degradation of prior uniform distillation methods stems primarily from treating all spatial regions equally.
What would settle it
A controlled experiment in which a uniform-distillation baseline, using identical feature extractors and training data, matches or exceeds SSD accuracy on the dynamic sequences of HeRCULES.
Figures
read the original abstract
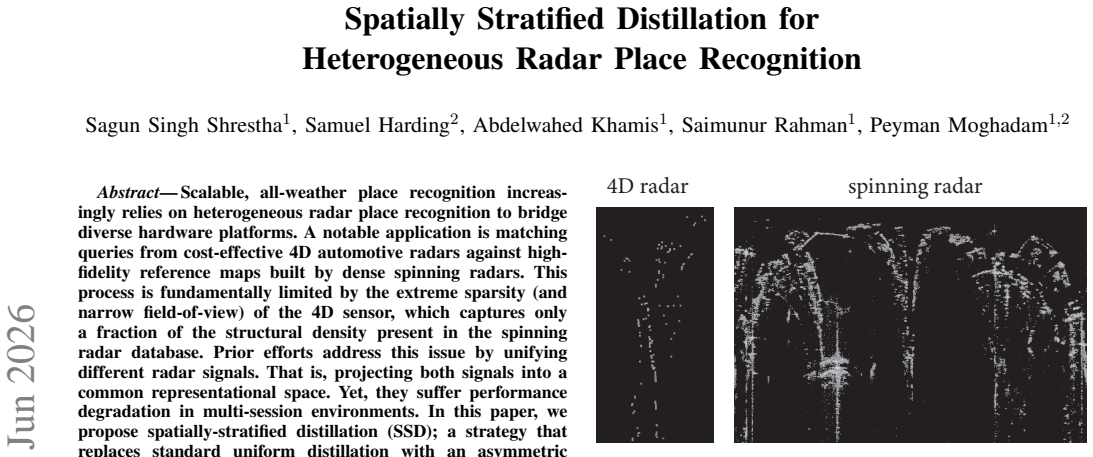
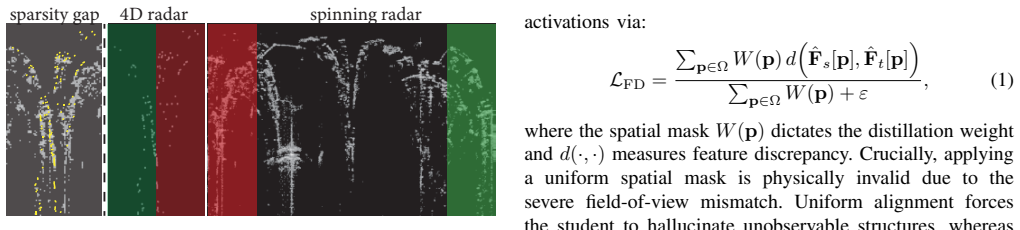
Scalable, all-weather place recognition increasingly relies on heterogeneous radar place recognition to bridge diverse hardware platforms. A notable application is matching queries from cost-effective 4D automotive radars against high-fidelity reference maps built by dense spinning radars. This process is fundamentally limited by the extreme sparsity (and narrow field-of-view) of the 4D sensor, which captures only a fraction of the structural density present in the spinning radar database. Prior efforts address this issue by unifying different radar signals. That is, projecting both signals into a common representational space. Yet, they suffer performance degradation in multi-session environments. In this paper, we propose spatially-stratified distillation (SSD); a strategy that replaces standard uniform distillation with an asymmetric spatial alignment derived directly from physical radar returns. In regions where both radars exhibit overlapping returns, SSD enforces strong feature alignment. Crucially, in sparse regions where the 4D student lacks returns but the teacher contains valid structure within the shared field of view, SSD applies heavily discounted distillation weights. Extensive evaluations of the recent HeRCULES dataset demonstrate that SSD significantly outperforms prior place recognition methods, achieving state-of-the-art results on its challenging dynamic sequences.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Spatially Stratified Distillation (SSD) for heterogeneous radar place recognition, replacing uniform distillation with asymmetric spatial weights derived from physical radar returns: strong alignment enforced on overlapping returns and heavily discounted weights applied in 4D-sparse regions where the student lacks returns but the teacher has structure. It claims this addresses performance degradation of prior methods in multi-session settings and achieves state-of-the-art results on the HeRCULES dataset's challenging dynamic sequences via extensive evaluations.
Significance. If the central claim holds after addressing the noted gaps, the work could advance scalable all-weather place recognition across heterogeneous radar platforms by better handling sparsity and field-of-view mismatches. A strength is the parameter-free derivation directly from physical radar returns rather than fitted parameters.
major comments (2)
- [Evaluation] Evaluation section (as described in abstract): the claim that SSD significantly outperforms prior uniform distillation methods because they treat all spatial regions equally is not supported by any ablation isolating this factor from architecture, training protocol, or dataset characteristics; without such isolation the attribution of gains to spatial stratification remains unconfirmed.
- [Abstract] Abstract and method description: while the asymmetric weighting is presented as derived directly from radar returns, the manuscript provides no quantitative results, tables, or figures in the supplied text to allow assessment of whether the reported SOTA on dynamic sequences is robust or sensitive to implementation details.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point by point below, with plans for revision where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section (as described in abstract): the claim that SSD significantly outperforms prior uniform distillation methods because they treat all spatial regions equally is not supported by any ablation isolating this factor from architecture, training protocol, or dataset characteristics; without such isolation the attribution of gains to spatial stratification remains unconfirmed.
Authors: We agree that an explicit ablation isolating the spatial stratification mechanism would provide clearer attribution of the performance gains. While the manuscript already compares SSD against prior uniform-distillation baselines under otherwise matched conditions, we will add a controlled ablation in the revised Evaluation section that holds architecture, training protocol, and dataset fixed while varying only the weighting strategy. This will directly confirm the contribution of the asymmetric spatial weights. revision: yes
-
Referee: [Abstract] Abstract and method description: while the asymmetric weighting is presented as derived directly from radar returns, the manuscript provides no quantitative results, tables, or figures in the supplied text to allow assessment of whether the reported SOTA on dynamic sequences is robust or sensitive to implementation details.
Authors: The full manuscript contains a complete Evaluation section with quantitative tables, figures, and metrics on the HeRCULES dynamic sequences demonstrating the claimed SOTA performance. The abstract summarizes these results at a high level due to length constraints. The weighting is derived parameter-free from physical radar return overlap, eliminating sensitivity to fitted hyperparameters; we can expand the method description with additional implementation details if required for reproducibility. revision: partial
Circularity Check
No circularity; SSD defined from radar physics without reduction to fitted inputs or self-citations
full rationale
The provided abstract and context describe SSD as an asymmetric spatial alignment strategy derived directly from physical radar returns (strong weights on overlap, discounted on 4D-sparse regions), with performance validated empirically on the HeRCULES dataset. No equations, parameter-fitting steps presented as predictions, self-citation load-bearing premises, or uniqueness theorems are exhibited that would reduce the claimed result to its own inputs by construction. The central method is presented as a direct physical-motivated replacement for uniform distillation rather than a renaming or self-referential fit, rendering the derivation self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Logg3d-net: Locally guided global descriptor learning for 3d place recognition,
K. Vidanapathirana, M. Ramezani, P. Moghadam, S. Sridharan, and C. Fookes, “Logg3d-net: Locally guided global descriptor learning for 3d place recognition,” in2022 International Conference on Robotics and Automation (ICRA), pp. 2215–2221, IEEE, 2022
2022
-
[2]
Spectral geometric verification: Re-ranking point cloud retrieval for metric localization,
K. Vidanapathirana, P. Moghadam, S. Sridharan, and C. Fookes, “Spectral geometric verification: Re-ranking point cloud retrieval for metric localization,”IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 2494–2501, 2023
2023
-
[3]
Pair-vpr: Place-aware pre-training and contrastive pair classification for visual place recognition with vision transformers,
S. Hausler and P. Moghadam, “Pair-vpr: Place-aware pre-training and contrastive pair classification for visual place recognition with vision transformers,”IEEE Robotics and Automation Letters, 2025
2025
-
[4]
J. Knights, J. Reid, K. Roy, D. Hall, M. Cox, and P. Moghadam, “Wildcross: A cross-modal large scale benchmark for place recog- nition and metric depth estimation in natural environments,”arXiv preprint arXiv:2603.01475, 2026
arXiv 2026
-
[5]
Sherloc: Synchronized heterogeneous radar place recognition for cross-modal localization,
H. Kim, M. Jung, W. Yang, and A. Kim, “Sherloc: Synchronized heterogeneous radar place recognition for cross-modal localization,” IEEE Robotics and Automation Letters, 2025
2025
-
[6]
Radardistill: Boosting radar-based object detection performance via knowledge distillation from lidar features,
G. Bang, K. Choi, J. Kim, D. Kum, and J. W. Choi, “Radardistill: Boosting radar-based object detection performance via knowledge distillation from lidar features,” inCVPR, 2024
2024
-
[7]
Hercules: A heterogeneous radar and lidar dataset for autonomous driving,
H. Kimet al., “Hercules: A heterogeneous radar and lidar dataset for autonomous driving,”arXiv preprint arXiv:2502.01946, 2025
arXiv 2025
-
[8]
Mulran: Multi- modal range dataset for urban place recognition,
G. Kim, Y . S. Park, Y . Cho, J. Jeong, and A. Kim, “Mulran: Multi- modal range dataset for urban place recognition,” inICRA, pp. 6246– 6253, 2020
2020
-
[9]
Raplace: Place recognition for imaging radar using radon transform and mutable threshold,
H. Jang, M. Jung, and A. Kim, “Raplace: Place recognition for imaging radar using radon transform and mutable threshold,” inIROS, pp. 11194–11201, 2023
2023
-
[10]
Open-radvlad: Fast and robust radar place recognition,
M. Gadd and P. Newman, “Open-radvlad: Fast and robust radar place recognition,” in2024 IEEE Radar Conference (RadarConf24), pp. 1– 6, IEEE, 2024
2024
-
[11]
Autoplace: Robust place recognition with single-chip automotive radar,
K. Cai, B. Wang, and C. X. Lu, “Autoplace: Robust place recognition with single-chip automotive radar,” inICRA, pp. 2222–2228, 2022
2022
-
[12]
Improving point cloud based place recognition with ranking-based loss and large batch training,
J. Komorowski, “Improving point cloud based place recognition with ranking-based loss and large batch training,” inICPR, pp. 3699–3705, 2022
2022
-
[13]
Transloc4d: Transformer-based 4d radar place recognition,
L. Zhanget al., “Transloc4d: Transformer-based 4d radar place recognition,” inCVPR, 2024. Accepted to the IEEE ICRA Workshop on Open Challenges for Rigorous Robot Perception 2026
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.