Regularized Model Predictive Control via Contractivity and Implicit Lur'e Analysis
Pith reviewed 2026-07-02 08:49 UTC · model grok-4.3
The pith
Regularized model predictive control admits contraction certificates via a multiplier framework for implicit Lur'e systems and associated LMI conditions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Regularized MPC feedback can be represented as an implicit Lur'e system whose contraction is certified by a multiplier-based framework that yields explicit LMI conditions for the three listed classes of regularizers, thereby providing formal stability guarantees that hold uniformly across those regularizers.
What carries the argument
Multiplier-based contraction framework for implicit Lur'e systems, which converts the perturbed optimality conditions of regularized MPC into verifiable linear matrix inequalities.
If this is right
- Regularized MPC retains contraction-based stability for convex smooth, convex closed proper, and Lipschitz-gradient regularizers.
- Input and state soft penalties, hard input constraints, and sparsity-promoting penalties all fall under the certified classes.
- Regularization parameters can be tuned to shape transient performance without invalidating the stability certificate.
- The same LMI conditions apply to any finite-horizon optimal control problem whose regularizer belongs to one of the three classes.
Where Pith is reading between the lines
- The LMI conditions could be solved offline to select regularizer weights that achieve desired performance margins.
- The implicit Lur'e representation may allow similar analysis for other optimization-based controllers beyond MPC.
- The multiplier framework might connect to incremental passivity or robust control certificates for nonlinear feedback laws.
Load-bearing premise
The regularizing cost must perturb the optimality conditions so that the closed-loop map becomes an implicit Lur'e system that admits a multiplier-based contraction certificate expressible as LMIs.
What would settle it
A concrete closed-loop trajectory or eigenvalue computation for one of the three regularizer classes where the derived LMIs are feasible yet the system state does not contract under the regularized feedback.
Figures
read the original abstract
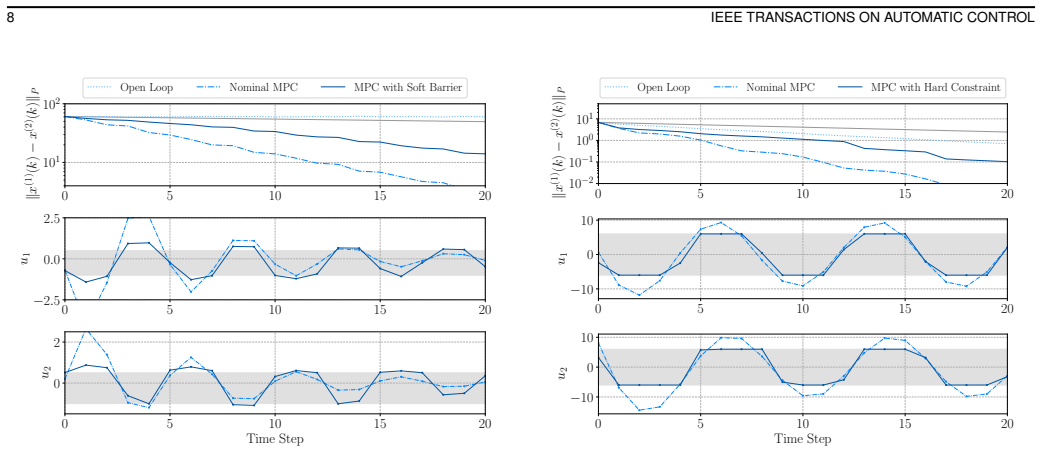
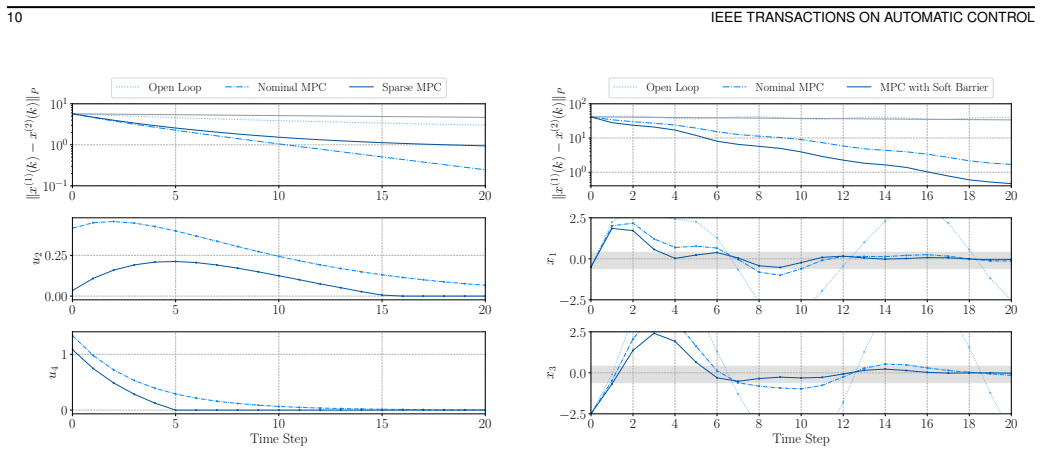
This paper develops a contraction-based stability analysis for regularized model predictive control (MPC), whose feedback law is defined implicitly by a finite-horizon optimal control problem with an additional regularizing cost. The proposed approach interprets regularized MPC as an implicit Lur'e system, in which the regularizing cost perturbs the optimality conditions. We develop a multiplier-based contraction framework for implicit Lur'e systems and derive linear matrix inequality conditions for regularized MPC with three broad classes of regularizers: convex smooth stage costs, convex closed proper stage costs, and differentiable regularizers with Lipschitz gradients. Numerical studies on input and state soft penalties, hard input constraints, and sparsity-promoting penalties illustrate that regularization shapes closed-loop performance while retaining formal contraction-based stability guarantees.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a contraction-based stability analysis for regularized model predictive control by representing the implicitly defined feedback law as an implicit Lur'e system in which the regularizing cost perturbs the optimality conditions. It introduces a multiplier-based contraction framework for such systems and derives LMI conditions for three classes of regularizers (convex smooth stage costs, convex closed proper stage costs, and differentiable regularizers with Lipschitz gradients), with numerical examples on soft penalties, hard constraints, and sparsity-promoting penalties.
Significance. If the LMI derivations and contraction certificates hold, the work supplies a systematic, multiplier-based route to contraction guarantees for regularized MPC. This is significant because it connects contraction theory and implicit Lur'e analysis to a practically relevant class of optimization-based controllers, enabling regularization to shape performance while retaining formal stability certificates. The explicit treatment of three broad regularizer classes and the accompanying numerical validation are strengths.
minor comments (1)
- [Abstract] The abstract asserts that LMI conditions are derived but does not exhibit any explicit LMIs, multiplier selections, or key proof steps; the full manuscript should make these derivations self-contained and verifiable.
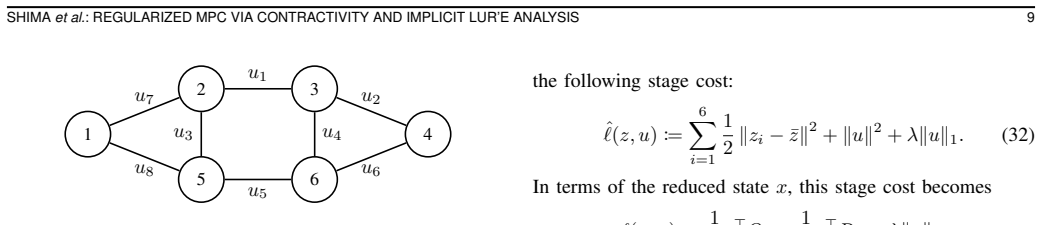
Simulated Author's Rebuttal
We thank the referee for their accurate summary of the manuscript and for recognizing the significance of the multiplier-based contraction framework for implicit Lur'e representations of regularized MPC. The recommendation is listed as uncertain, yet no specific major comments or concerns are provided in the report. We therefore have no points to address point-by-point and maintain that the LMI derivations, contraction certificates, and numerical validation stand as presented.
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's core derivation represents regularized MPC optimality conditions as an implicit Lur'e interconnection and obtains contraction certificates via multiplier theory cast as LMIs for three standard regularizer classes. This proceeds from established contraction analysis and Lur'e system theory without any step that reduces by construction to a fitted parameter, self-defined quantity, or load-bearing self-citation. The modeling choice itself is the explicit contribution being justified, not an input assumed without derivation. No self-definitional, fitted-prediction, or uniqueness-imported patterns appear in the stated claims.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
B. Ac ¸ıkmes ¸e and M. Corless. Observers for systems with nonlinearities satisfying incremental quadratic constraints.Automatica, 47(7):1339– 1348, 2011.doi:10.1016/j.automatica.2011.02.017
-
[2]
T. Amy, H. Kong, D. Auger, G. Offer, and S. Longo. Regularized MPC for power management of hybrid energy storage systems with applications in electric vehicles.IFAC-PapersOnLine, 49(11):265–270, 2016.doi:10.1016/j.ifacol.2016.08.040
-
[3]
D. A. Apaza Laura, D. I. Apaza Laura, M. Sarcinelli-Filho, and D. K. D. Villa. Model predictive control with soft constraints for UA V trajectory tracking and obstacle avoidance. InIEEE Int. Conf. on Advanced Robotics, pages 450–455, 2025.doi:10.1109/ICAR65334.2025. 11338726. SHIMAet al.: REGULARIZED MPC VIA CONTRACTIVITY AND IMPLICIT LUR’E ANAL YSIS 11
-
[4]
H. H. Bauschke and P. L. Combettes.Convex Analysis and Monotone Operator Theory in Hilbert Spaces. Springer, 2 edition, 2017, ISBN 978-3-319-48310-8.doi:10.1007/978-3-319-48311-5
-
[5]
F. Bonassi, A. La Bella, M. Farina, and R. Scattolini. Nonlinear MPC design for incrementally ISS systems with application to GRU networks. Automatica, 159:111381, 2024.doi:10.1016/j.automatica. 2023.111381
-
[6]
S. Boyd, L. El Ghaoui, E. Feron, and V . Balakrishnan.Linear Matrix Inequalities in System and Control Theory. SIAM, 1994, ISBN 089871334X.doi:10.1137/1.9781611970777
-
[7]
Bullo.Contraction Theory for Dynamical Systems
F. Bullo.Contraction Theory for Dynamical Systems. Kindle Direct Publishing, 1.3 edition, 2026, ISBN 979-8836646806. URL:https: //fbullo.github.io/ctds
2026
-
[8]
Conte, C
C. Conte, C. N. Jones, M. Morari, and M. N. Zeilinger. Distributed synthesis and stability of cooperative distributed model predictive control for linear systems.Automatica, 69:117–125, 2016.doi:10.1016/ j.automatica.2016.02.009
2016
-
[9]
D’Alto and M
L. D’Alto and M. Corless. Incremental quadratic stability.Numerical Algebra, Control and Optimization, 3:175–201, 2013.doi:10.3934/ naco.2013.3.175
2013
-
[10]
A. Davydov and F. Bullo. Exponential stability of parametric optimization-based controllers via Lur’e contractivity.IEEE Control Systems Letters, 8:1277–1282, 2024.doi:10.1109/LCSYS.2024. 3408110
-
[11]
A. Davydov, V . Centorrino, A. Gokhale, G. Russo, and F. Bullo. Time- varying convex optimization: A contraction and equilibrium tracking approach.IEEE Transactions on Automatic Control, 70(11):7446–7460, 2025.doi:10.1109/TAC.2025.3576043
-
[12]
N. M. C. De Oliveira and L. T. Biegler. Constraint handling and stability properties of model-predictive control.AIChE Journal, 40(7):1138– 1155, 1994.doi:10.1002/aic.690400706
-
[13]
T. Dinev, W. Merkt, V . Ivan, I. Havoutis, and S. Vijayakumar. Sparsity- inducing optimal control via differential dynamic programming. InIEEE Int. Conf. on Robotics and Automation, pages 8216–8222, 2021.doi: 10.1109/ICRA48506.2021.9560961
-
[14]
A. L. Dontchev and R. T. Rockafellar.Implicit Functions and Solution Mappings. Springer, 2009.doi:10.1007/978-0-387-87821-8
-
[15]
T. Faulwasser, L. Gr ¨une, and M. A. M ¨uller. Economic nonlinear model predictive control.Foundations and Trends in Systems and Control, 5(1):1–98, 2018.doi:10.1561/2600000014
-
[16]
M. Fazlyab, M. Morari, and G. J. Pappas. Safety verification and robustness analysis of neural networks via quadratic constraints and semidefinite programming.IEEE Transactions on Automatic Control, 67(1):1–15, 2022.doi:10.1109/TAC.2020.3046193
-
[17]
Gallieri.Lasso-MPC—Predictive Control withℓ 1-Regularised Least Squares
M. Gallieri.Lasso-MPC—Predictive Control withℓ 1-Regularised Least Squares. Springer Theses. Springer, 2016.doi:10.1007/ 978-3-319-27963-3
2016
-
[18]
M. Giaccagli, V . Andrieu, S. Tarbouriech, and D. Astolfi. LMI conditions for contraction, integral action, and output feedback stabilization for a class of nonlinear systems.Automatica, 154:111106, 2023.doi: 10.1016/j.automatica.2023.111106
-
[19]
A. Gokhale, A. V . Proskurnikov, Y . Kawano, and F. Bullo. A nonlinear separation principle via contraction theory: Applications to neural net- works, control, and learning.IEEE Transactions on Automatic Control, April 2026. Submitted.doi:10.48550/arXiv.2604.15238
work page internal anchor Pith review Pith/arXiv arXiv doi:10.48550/arxiv.2604.15238 2026
-
[20]
S. Hall, G. Belgioioso, F. D ¨orfler, and D. Liao-McPherson. Stability certificates for receding-horizon games.IEEE Transactions on Auto- matic Control, 71(5):3511–3518, 2026.doi:10.1109/tac.2025. 3647314
-
[21]
J. Køhler, R. Soloperto, M. A. M ¨uller, and F. Allg ¨ower. A computa- tionally efficient robust model predictive control framework for uncertain nonlinear systems.IEEE Transactions on Automatic Control, 66(2):794– 801, 2021.doi:10.1109/TAC.2020.2982585
-
[22]
Adaptive parameter estimation-based observer design for nonlinear systems
A. Lakshmanan, A. Gahlawat, and N. Hovakimyan. Safe feedback motion planning: A contraction theory andL 1-adaptive control based approach. InIEEE Conf. on Decision and Control, pages 1578–1583, 2020.doi:10.1109/CDC42340.2020.9303957
-
[23]
D. Q. Mayne, J. B. Rawlings, C. V . Rao, and P. O. M. Scokaert. Con- strained model predictive control: Stability and optimality.Automatica, 36(6):789–814, 2000.doi:10.1016/S0005-1098(99)00214-9
-
[24]
Nesterov.Lectures on Convex Optimization
Y . Nesterov.Lectures on Convex Optimization. Springer, 2 edition, 2018.doi:10.1007/978-3-319-91578-4
-
[25]
Oomen and C
T. Oomen and C. R. Rojas. Sparse iterative learning control with application to a wafer stage: Achieving performance, resource efficiency, and task flexibility.Mechatronics, 47:134–147, 2017.doi:10.1016/ j.mechatronics.2017.09.004
2017
-
[26]
I. Queinnec, S. Tarbouriech, G. Valmorbida, and L. Zaccarian. Design of saturating state feedback with sign-indefinite quadratic forms.IEEE Transactions on Automatic Control, 67(7):3507–3520, 2022.doi:10. 1109/tac.2021.3106878
-
[27]
J. B. Rawlings, D. Q. Mayne, and M. M. Diehl.Model Predictive Control: Theory and Design. Nob Hill Publishing, 2 edition, 2019, ISBN 9780975937730
2019
-
[28]
M. Revay, R. Wang, and I. R. Manchester. Recurrent equilibrium networks: Flexible dynamic models with guaranteed stability and ro- bustness.IEEE Transactions on Automatic Control, 69(5):2855–2870, 2024.doi:10.1109/tac.2023.3294101
-
[29]
E. K. Ryu and S. Boyd. Primer on monotone operator methods.Applied Computational Mathematics, 15(1):3–43, 2016
2016
-
[30]
J. D. Schiller, S. Muntwiler, J. K ¨ohler, M. N. Zeilinger, and M. A. M¨uller. A Lyapunov function for robust stability of Moving Horizon Estimation.IEEE Transactions on Automatic Control, 68(12):7466– 7481, 2023.doi:10.1109/TAC.2023.3280344
-
[31]
R. Wang and I. R. Manchester. Robust contraction analysis of non- linear systems via differential IQC. InIEEE Conf. on Decision and Control, pages 6766–6771, 2019.doi:10.1109/CDC40024.2019. 9029867
-
[32]
Winston and J
E. Winston and J. Z. Kolter. Monotone operator equilibrium net- works. InAdvances in Neural Information Processing Systems,
-
[33]
URL:https://arxiv.org/abs/2006.08591,doi:10. 48550/arXiv.2006.08591
-
[34]
S. Yu, C. Maier, H. Chen, and F. Allg ¨ower. Tube MPC scheme based on robust control invariant set with application to Lipschitz nonlinear systems.Systems & Control Letters, 62(2):194–200, 2013.doi:10. 1016/j.sysconle.2012.11.004. APPENDIXI SUPPLEMENTALLEMMATA FORPROOF OFPROPOSITION2 Lemma 4 (Core for LMI feasibility):LetN 1 ∈R n×n, N2 ∈ Rm×m be negative ...
2013
-
[35]
u(1) h −u (2) h g(1) h −g (2) h #⊤ M
The IMM condition (37) can be rewritten as ∆z⊤S∆z≥ ∥∆g+ ¯M −1 22 ¯M ⊤ 12∆z∥2 − ¯M22 , which in turn yields ρ(S)∥∆z∥2 ≥λ min(− ¯M22)∥∆g+ ¯M −1 22 ¯M ⊤ 12∆z∥2,(38) whereλ min(·)denotes the minimum eigenvalue of a matrix. Since− ¯M22 ≻0, we haveλ min(− ¯M22)>0. Using the triangle inequality and (38), we obtain ∥∆g∥ ≤ ∥∆g+ ¯M −1 22 ¯M ⊤ 12∆z∥+∥ ¯M −1 22 ¯M ⊤ ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.