Ordinal Neural Collapse as a Representation Prior for Visual Navigation
Pith reviewed 2026-06-26 04:48 UTC · model grok-4.3
The pith
ORION organizes the visual encoder's feature space along an ordinal axis matching navigation action order to produce more consistent policies.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
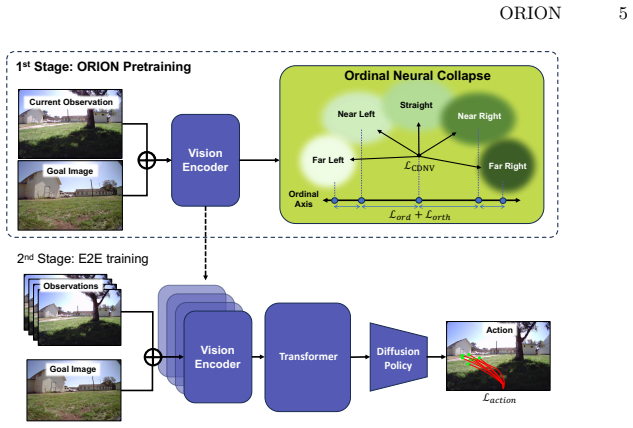
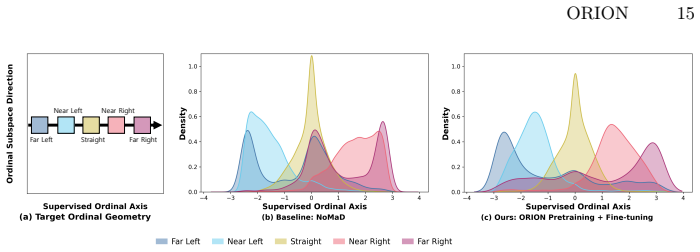
ORION explicitly organizes the encoder's representation space according to the ordinal structure of navigation actions. In goal-directed navigation, ego-centric control categories from Far Left to Far Right exhibit a natural ordinal relationship in which neighboring classes share similar visual contexts while opposing classes differ substantially. The method encourages class representations to be arranged sequentially along a single discriminative axis while suppressing off-axis variance within each class. The pretrained encoder is integrated into a diffusion-based navigation framework and the full pipeline is fine-tuned end-to-end.
What carries the argument
ORION (Ordinal Neural Collapse for Visual Navigation), which arranges action-class means along one ordered axis and minimizes within-class variance to create action-aware visual features.
If this is right
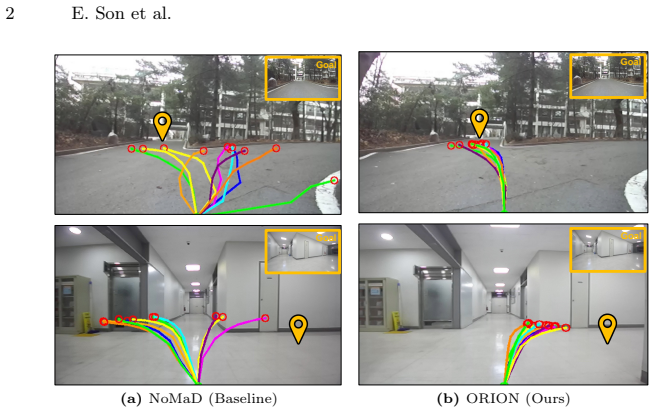
- The policy generates fewer contradictory actions when visual scenes are ambiguous.
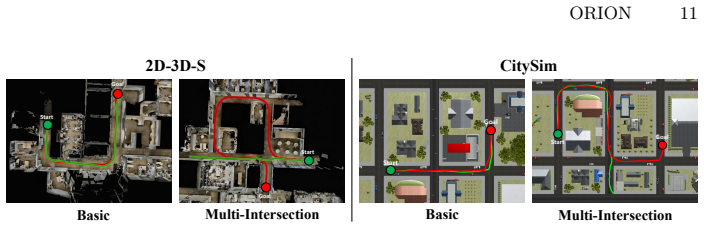
- Gains are largest in visually complex multi-way intersections.
- The encoder can be pretrained separately then fine-tuned end-to-end inside the diffusion framework.
- The approach beats both vanilla end-to-end imitation and non-ordinal neural collapse baselines on success rate and goal progress.
Where Pith is reading between the lines
- The same ordinal collapse could be applied to other ordered control problems such as lane-keeping or manipulator joint sequencing.
- Removing the ordinal ordering while retaining the collapse mechanism would isolate whether sequence matters more than collapse alone.
- The single-axis prior might be stacked with other geometric constraints on features for hybrid representation learning.
- Testing on datasets where action visuals lack clear ordinal structure would expose the method's domain limits.
Load-bearing premise
Navigation actions from Far Left to Far Right possess a natural ordinal relationship in which neighboring actions share similar visual contexts.
What would settle it
A controlled test in which the same collapse loss is applied but action labels are randomly permuted, with no gain in navigation success rate, would show the ordinal ordering itself is not responsible.
Figures
read the original abstract
Learning robust navigation policies directly from visual observations remains a fundamental challenge in vision-based robotic navigation. In end-to-end imitation learning approaches, the visual encoder and action decoder are jointly optimized using a single action loss, which provides only an indirect supervisory signal to the encoder. This indirect supervision frequently results in the encoder learning ambiguous, action-agnostic representations. The problem is further complicated by substantial variations in scene structure and appearance across diverse environments, as well as the prevalence of visual distractors inherent to real-world navigation settings. Such action-agnostic features cause the navigation policy to produce inconsistent actions at ambiguous decision points, leading to navigation failure. To overcome these limitations, we propose ORION (Ordinal Neural Collapse for Visual Navigation), a method that explicitly organizes the encoder's representation space according to the ordinal structure of navigation actions. In the context of goal-directed navigation, ego-centric control categories from Far Left to Far Right exhibit a natural ordinal relationship in which neighboring classes share similar visual contexts, while semantically opposing classes differ substantially in appearance. We encourage class representations to be arranged sequentially along a single discriminative axis, while suppressing off-axis variance within each class. The pretrained encoder is then integrated into a diffusion-based navigation framework, and the full pipeline is fine-tuned end-to-end. Extensive experiments in both simulation and real-world settings show that ORION consistently outperforms end-to-end and neural collapse baselines in navigation success rate and goal progress, with notable gains in visually challenging scenarios such as complex multi-way intersections.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
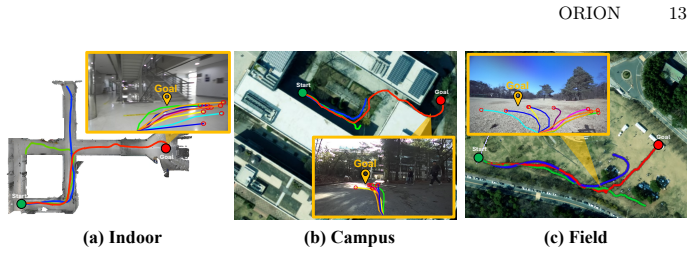
Summary. The paper proposes ORION (Ordinal Neural Collapse for Visual Navigation), which pretrains a visual encoder by imposing an ordinal neural collapse loss that arranges class representations sequentially along a single axis according to the assumed ordinal structure of ego-centric navigation actions (Far Left to Far Right), then integrates the encoder into a diffusion-based navigation policy and fine-tunes end-to-end. It claims consistent outperformance over end-to-end imitation learning and standard neural collapse baselines in navigation success rate and goal progress, with gains in visually challenging scenarios such as multi-way intersections, in both simulation and real-world settings.
Significance. If the core assumption holds and the gains are attributable to the ordinal prior rather than implementation details, the work could offer a targeted representation learning technique for goal-directed visual navigation that exploits action ordinality to reduce ambiguity at decision points. The end-to-end fine-tuning with a diffusion policy is a reasonable integration choice.
major comments (1)
- [Abstract] Abstract: The central modeling assumption that 'ego-centric control categories from Far Left to Far Right exhibit a natural ordinal relationship in which neighboring classes share similar visual contexts, while semantically opposing classes differ substantially in appearance' is presented as given, without any supporting evidence (e.g., pre-training feature visualizations, inter-class similarity matrices, or ablation on datasets with symmetric intersections). This assumption directly motivates the ordinal collapse loss and is load-bearing for the claim that the method resolves action-agnostic representations rather than introducing bias; its absence leaves the method's validity dependent on an untested premise about visual geometry.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comment point-by-point below.
read point-by-point responses
-
Referee: The central modeling assumption that 'ego-centric control categories from Far Left to Far Right exhibit a natural ordinal relationship in which neighboring classes share similar visual contexts, while semantically opposing classes differ substantially in appearance' is presented as given, without any supporting evidence (e.g., pre-training feature visualizations, inter-class similarity matrices, or ablation on datasets with symmetric intersections). This assumption directly motivates the ordinal collapse loss and is load-bearing for the claim that the method resolves action-agnostic representations rather than introducing bias; its absence leaves the method's validity dependent on an untested premise about visual geometry.
Authors: We agree that the abstract presents the ordinal relationship as a modeling assumption without direct supporting evidence. In the revised manuscript we will add pre-training feature visualizations and inter-class similarity matrices computed on the navigation datasets to substantiate the claim that neighboring action classes share visual contexts while opposing classes differ. We will also expand the introduction to include a brief geometric argument based on ego-centric camera geometry. Regarding an ablation on symmetric intersections, our evaluation uses standard navigation benchmarks that do not contain balanced symmetric cases; we will add a short discussion clarifying why the ordinal prior remains appropriate for typical asymmetric environments and note this as a limitation for future work. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper's core contribution is an auxiliary loss that explicitly imposes an ordinal arrangement on class representations using the same action category labels already present in the navigation task. This is presented as a modeling choice grounded in a domain assumption about visual similarity of ego-centric actions, not as a derived prediction or theorem. No equations, self-citations, or uniqueness claims are visible that would reduce any claimed result to a fitted input or prior work by the same authors. The derivation chain therefore remains self-contained: the loss definition directly encodes the desired geometry, the encoder is pretrained with it, and downstream performance is evaluated empirically against baselines.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Ego-centric control categories from Far Left to Far Right exhibit a natural ordinal relationship in which neighboring classes share similar visual contexts, while semantically opposing classes differ substantially in appearance.
Reference graph
Works this paper leans on
-
[1]
Technometrics , volume=
Note on a method for calculating corrected sums of squares and products , author=. Technometrics , volume=. 1962 , publisher=
1962
-
[2]
The Thirteenth International Conference on Learning Representations , year=
Control-oriented Clustering of Visual Latent Representation , author=. The Thirteenth International Conference on Learning Representations , year=
-
[3]
Advances in neural information processing systems , volume=
Alvinn: An autonomous land vehicle in a neural network , author=. Advances in neural information processing systems , volume=
-
[4]
2005 , publisher=
Probabilistic robotics , author=. 2005 , publisher=
2005
-
[5]
International Conference on Learning Representations , year=
Learning to Navigate in Complex Environments , author=. International Conference on Learning Representations , year=
-
[6]
2018 IEEE international conference on robotics and automation (ICRA) , pages=
End-to-end driving via conditional imitation learning , author=. 2018 IEEE international conference on robotics and automation (ICRA) , pages=. 2018 , organization=
2018
-
[7]
IEEE Robotics and Automation Letters , volume=
Deep visual mpc-policy learning for navigation , author=. IEEE Robotics and Automation Letters , volume=. 2019 , publisher=
2019
-
[8]
Conference on Robot Learning , year=
ViNT: A Foundation Model for Visual Navigation , author=. Conference on Robot Learning , year=
-
[9]
2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Nomad: Goal masked diffusion policies for navigation and exploration , author=. 2024 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2024 , organization=
2024
-
[10]
arXiv preprint arXiv:2504.10003 , year=
NaviDiffusor: Cost-Guided Diffusion Model for Visual Navigation , author=. arXiv preprint arXiv:2504.10003 , year=
-
[11]
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , year=
Prior Does Matter: Visual Navigation via Denoising Diffusion Bridge Models , author=. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition , year=
-
[12]
Proceedings of Robotics: Science and Systems (RSS) , year=
Diffusion Policy: Visuomotor Policy Learning via Action Diffusion , author=. Proceedings of Robotics: Science and Systems (RSS) , year=
-
[13]
Advances in neural information processing systems , volume=
Adversarial examples are not bugs, they are features , author=. Advances in neural information processing systems , volume=
-
[14]
Nature Machine Intelligence , volume=
Shortcut learning in deep neural networks , author=. Nature Machine Intelligence , volume=. 2020 , publisher=
2020
-
[15]
International conference on machine learning , pages=
Curl: Contrastive unsupervised representations for reinforcement learning , author=. International conference on machine learning , pages=. 2020 , organization=
2020
-
[16]
International Conference on Learning Representations , year=
Learning Invariant Representations for Reinforcement Learning without Reconstruction , author=. International Conference on Learning Representations , year=
-
[17]
International conference on machine learning , pages=
Decoupling representation learning from reinforcement learning , author=. International conference on machine learning , pages=. 2021 , organization=
2021
-
[18]
Conference on Robot Learning , pages=
R3M: A Universal Visual Representation for Robot Manipulation , author=. Conference on Robot Learning , pages=. 2023 , organization=
2023
-
[19]
Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
Learning navigational visual representations with semantic map supervision , author=. Proceedings of the IEEE/CVF International Conference on Computer Vision , pages=
-
[20]
Thirty-seventh Conference on Neural Information Processing Systems , year=
Where are we in the search for an Artificial Visual Cortex for Embodied Intelligence? , author=. Thirty-seventh Conference on Neural Information Processing Systems , year=
-
[21]
Proceedings of the National Academy of Sciences , volume=
Prevalence of neural collapse during the terminal phase of deep learning training , author=. Proceedings of the National Academy of Sciences , volume=. 2020 , publisher=
2020
-
[22]
The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
Neural Collapse in Cumulative Link Models for Ordinal Regression: An Analysis with Unconstrained Feature Model , author=. The Thirty-ninth Annual Conference on Neural Information Processing Systems , year=
-
[23]
Advances in Neural Information Processing Systems , volume=
A geometric analysis of neural collapse with unconstrained features , author=. Advances in Neural Information Processing Systems , volume=
-
[24]
Proceedings of the National Academy of Sciences , volume=
Exploring deep neural networks via layer-peeled model: Minority collapse in imbalanced training , author=. Proceedings of the National Academy of Sciences , volume=
-
[25]
International Conference on Machine Learning , pages=
On the optimization landscape of neural collapse under MSE loss: Global optimality with unconstrained features , author=. International Conference on Machine Learning , pages=. 2022 , organization=
2022
-
[26]
Advances in Neural Information Processing Systems , volume=
Inducing neural collapse in imbalanced learning: Do we really need a learnable classifier at the end of deep neural network? , author=. Advances in Neural Information Processing Systems , volume=
-
[27]
International Conference on Machine Learning , volume=
Neural collapse in deep linear networks: From balanced to imbalanced data , author=. International Conference on Machine Learning , volume=. 2023 , organization=
2023
-
[28]
Proceedings of the National Academy of Sciences , volume=
A law of data separation in deep learning , author=. Proceedings of the National Academy of Sciences , volume=
-
[29]
International Conference on Machine Learning , pages=
Feature learning in deep classifiers through intermediate neural collapse , author=. International Conference on Machine Learning , pages=. 2023 , organization=
2023
-
[30]
Journal of Machine Learning Research , volume=
Neural collapse for unconstrained feature model under cross-entropy loss with imbalanced data , author=. Journal of Machine Learning Research , volume=
-
[31]
Advances in Neural Information Processing Systems , volume=
Linguistic collapse: Neural collapse in (large) language models , author=. Advances in Neural Information Processing Systems , volume=
-
[32]
Transactions on Machine Learning Research , year=
Understanding and improving transfer learning of deep models via neural collapse , author=. Transactions on Machine Learning Research , year=
-
[33]
2021 , url=
Dhruv Shah and Benjamin Eysenbach and Nicholas Rhinehart and Sergey Levine , booktitle=. 2021 , url=
2021
-
[34]
IEEE Robotics and Automation Letters , volume=
Socially compliant navigation dataset (scand): A large-scale dataset of demonstrations for social navigation , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[35]
IEEE Robotics and Automation Letters , volume=
Sacson: Scalable autonomous control for social navigation , author=. IEEE Robotics and Automation Letters , volume=. 2023 , publisher=
2023
-
[36]
International conference on machine learning , pages=
Efficientnet: Rethinking model scaling for convolutional neural networks , author=. International conference on machine learning , pages=. 2019 , organization=
2019
-
[37]
2004 IEEE/RSJ international conference on intelligent robots and systems (IROS)(IEEE Cat
Design and use paradigms for gazebo, an open-source multi-robot simulator , author=. 2004 IEEE/RSJ international conference on intelligent robots and systems (IROS)(IEEE Cat. No. 04CH37566) , volume=. 2004 , organization=
2004
-
[38]
arXiv preprint arXiv:1702.01105 , year=
Joint 2d-3d-semantic data for indoor scene understanding , author=. arXiv preprint arXiv:1702.01105 , year=
-
[39]
International Conference on Learning Representations , year=
Decoupled Weight Decay Regularization , author=. International Conference on Learning Representations , year=
-
[40]
International Conference on Learning Representations , year=
On the Role of Neural Collapse in Transfer Learning , author=. International Conference on Learning Representations , year=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.