Video-Mirai: Autoregressive Video Diffusion Models Need Foresight
Pith reviewed 2026-06-28 10:25 UTC · model grok-4.3
The pith
Causal video generators close their planning gap when future frames supervise representations during training only.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
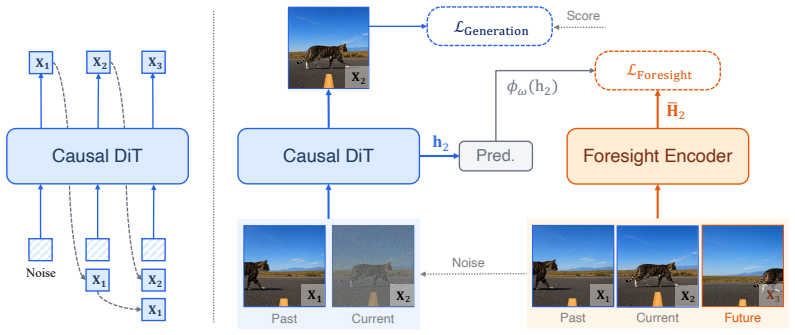
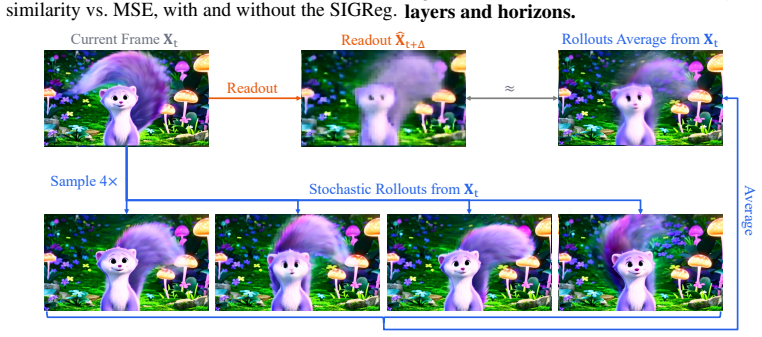
Video-Mirai is a training-only procedure in which the generator emits a causal rollout, a frozen foresight encoder reads the completed sequence non-causally to produce targets, and a predictor distills those stopped-gradient targets into the causal states so that future frames directly supervise representation quality.
What carries the argument
A non-causal foresight encoder that supplies future-conditioned targets from completed rollouts, distilled by a lightweight predictor into the generator's causal states.
If this is right
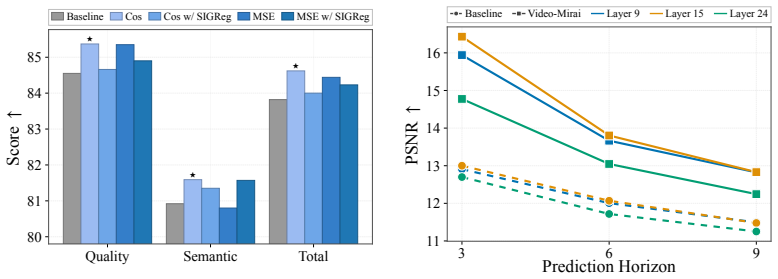
- Total score on 5-second VBench rises from 83.8 to 84.6.
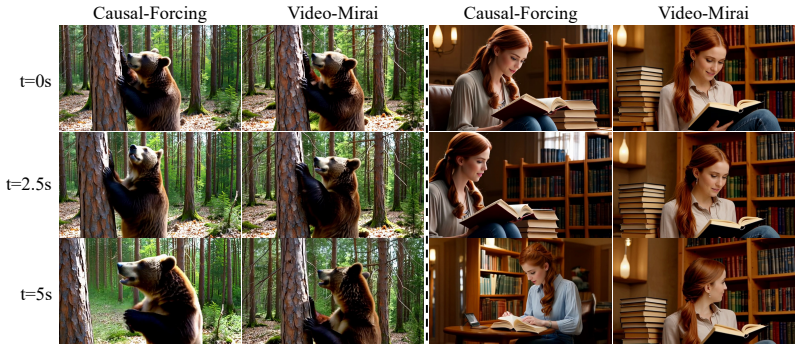
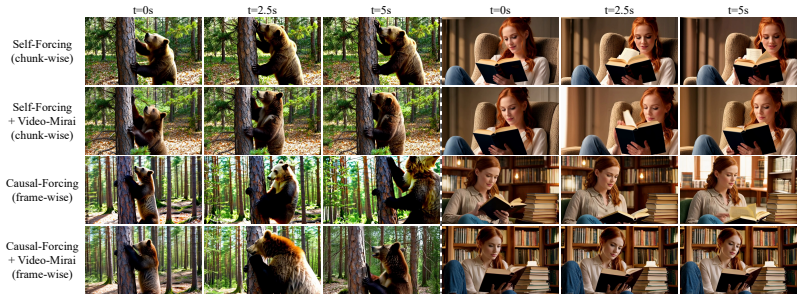
- Subject consistency on 30-second rollouts rises from 84.9 to 88.5.
- Background consistency on 30-second rollouts rises from 90.2 to 91.9.
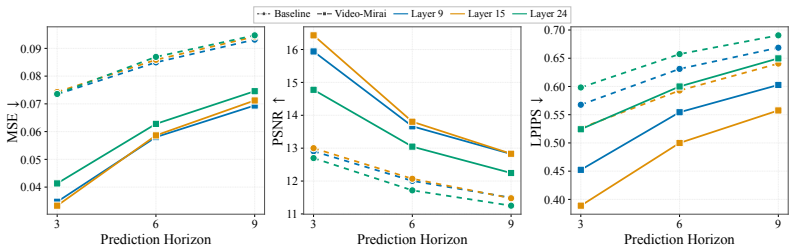
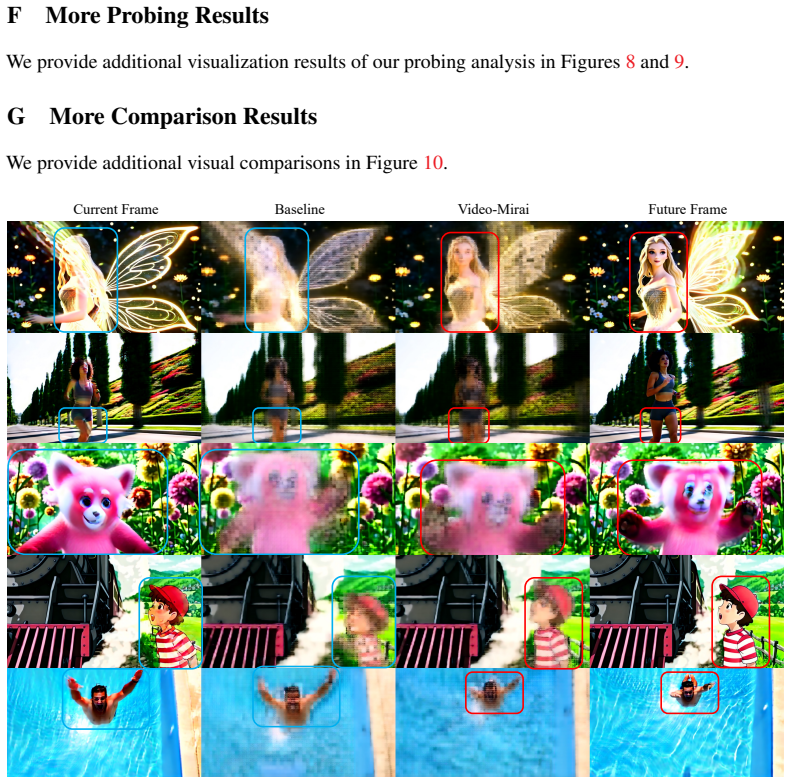
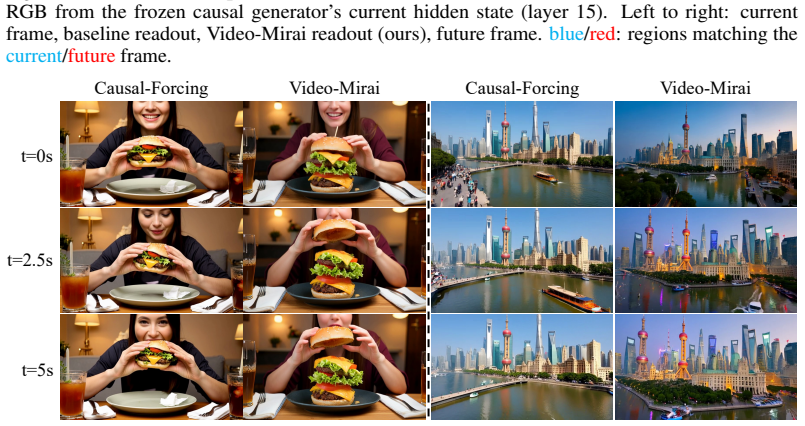
- Future frames become more linearly decodable from current causal features.
- Removing future-conditioned targets eliminates the measured gains.
Where Pith is reading between the lines
- The same separation of causal inference from non-causal supervision could be tested in autoregressive models for other modalities such as audio or 3D.
- Longer training horizons might amplify the consistency benefit if the foresight encoder can be scaled without increasing inference cost.
- The approach suggests that many autoregressive generators may improve by adding auxiliary future-prediction objectives that are discarded at test time.
Load-bearing premise
Targets produced by the non-causal foresight encoder on completed rollouts transfer useful information to causal states without introducing training artifacts.
What would settle it
Training the same generator without the foresight-derived targets and measuring whether 30-second subject and background consistency scores remain unchanged.
Figures

read the original abstract
Causal video generators must predict from the past, but they need not learn only from it. In streaming autoregressive video diffusion, each emitted segment becomes a commitment that future segments must preserve. Standard training, however, only asks each causal state to explain the present. This creates what we call a representation-level planning gap: states that fit the current segment may discard identity, layout, and motion information needed for a consistent future. We introduce Video-Mirai, a training-only method that closes this gap without changing causal inference: the generator rolls out causally, a frozen foresight encoder reads the completed rollout non-causally, and a lightweight predictor distills the resulting stopped-gradient targets into causal states. Future frames supervise representations, never generator inputs. At inference, the encoder and predictor are discarded, leaving the original architecture, per-step FLOPs, and KV-cache behavior unchanged. Video-Mirai improves a strong Causal-Forcing baseline on 5-second VBench from 83.8 to 84.6 in terms of Total Score. On 30-second rollouts beyond the training horizon, subject consistency improves from 84.9 to 88.5 and background consistency from 90.2 to 91.9. Ablations identify future-conditioned targets as the key ingredient, and probes show that future frames become more decodable from current features. Causality should constrain inference, not representation supervision. Our study highlights that visual autoregressive models need foresight. Project page: https://y0uroy.github.io/Video-Mirai.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Video-Mirai, a training-only auxiliary method for autoregressive video diffusion models. The generator produces causal rollouts; a frozen non-causal foresight encoder processes the completed sequence to yield stopped-gradient targets; a lightweight predictor distills those targets into the causal states. Future frames supervise representations only; at inference the encoder and predictor are removed, leaving the original causal architecture, per-step FLOPs, and KV-cache unchanged. Reported gains include a VBench 5-second total score lift from 83.8 to 84.6 and improved subject/background consistency on 30-second rollouts beyond the training horizon.
Significance. If the reported metric improvements prove robust, the approach offers a practical route to close the representation-level planning gap in causal video generators by supplying future-conditioned supervision without altering inference cost or architecture. The training-only nature and explicit ablations on future targets are positive features.
major comments (2)
- [Abstract] Abstract and method description provide no information on the foresight encoder's training data, architecture, or exposure to generated video; this leaves the distribution-shift concern (non-causal targets computed on model rollouts versus real-video training) unaddressed and makes it impossible to determine whether the observed 30 s consistency gains (subject 84.9→88.5, background 90.2→91.9) reflect foresight transfer or incidental regularization.
- [Abstract] No implementation details, error bars, statistical tests, or full baseline descriptions are supplied for the Causal-Forcing baseline or the reported VBench numbers; the soundness assessment therefore remains low and the central claim that future-conditioned targets are the key ingredient cannot yet be evaluated.
minor comments (1)
- [Abstract] The abstract states that probes show future frames become more decodable from current features; the corresponding probe design, layer, and quantitative results should be added for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below with clarifications and commitments to revisions where the manuscript can be strengthened without misrepresenting our results.
read point-by-point responses
-
Referee: [Abstract] Abstract and method description provide no information on the foresight encoder's training data, architecture, or exposure to generated video; this leaves the distribution-shift concern (non-causal targets computed on model rollouts versus real-video training) unaddressed and makes it impossible to determine whether the observed 30 s consistency gains (subject 84.9→88.5, background 90.2→91.9) reflect foresight transfer or incidental regularization.
Authors: We agree that the abstract and initial method description omitted key details on the foresight encoder. The encoder is a non-causal transformer-based video model with the same architecture as the generator but bidirectional attention; it is pre-trained exclusively on real videos from the training distribution (e.g., WebVid-10M) and remains frozen with no exposure to generated videos at any point. Targets are computed by applying this frozen encoder to the generator's completed causal rollouts (with stopped gradients), which does introduce a distribution shift relative to its real-video training. We will revise the abstract and method section to state these facts explicitly. The paper's ablations already show that ablating the future-conditioned aspect removes the consistency gains, suggesting the benefit is not incidental regularization; we will add a dedicated paragraph discussing the distribution-shift issue and its implications for the 30-second results. revision: yes
-
Referee: [Abstract] No implementation details, error bars, statistical tests, or full baseline descriptions are supplied for the Causal-Forcing baseline or the reported VBench numbers; the soundness assessment therefore remains low and the central claim that future-conditioned targets are the key ingredient cannot yet be evaluated.
Authors: We acknowledge that the manuscript lacks sufficient implementation details and statistical rigor for full reproducibility assessment. In revision we will add: a complete description of the Causal-Forcing baseline (standard autoregressive segment-by-segment training without the foresight distillation loss), all relevant hyperparameters, and expanded VBench protocol details including exact evaluation settings. The existing ablations already isolate future-conditioned targets as the key factor by comparing against variants lacking them. However, error bars and statistical tests were not computed in the original experiments. revision: partial
- Error bars and statistical tests on the reported VBench and consistency metrics, as these were not part of the original experimental protocol and would require new runs.
Circularity Check
No circularity: empirical training method with external encoder, no derivations or self-referential reductions
full rationale
The paper presents an empirical training procedure (causal rollout + frozen non-causal encoder + distillation predictor) whose benefits are measured on held-out metrics (VBench scores, long-rollout consistency). No equations, no fitted parameters renamed as predictions, and no load-bearing self-citations or uniqueness theorems appear in the provided text. The foresight encoder is described as external and frozen; inference discards it entirely. The central claim therefore rests on experimental outcomes rather than any definitional or self-referential reduction, making the derivation self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Diffusion for world modeling: Visual details matter in atari
Eloi Alonso, Adam Jelley, Vincent Micheli, Anssi Kanervisto, Amos Storkey, Tim Pearce, and François Fleuret. Diffusion for world modeling: Visual details matter in atari. InNeurIPS, volume 37, pages 58757–58791, 2024
2024
-
[2]
V-JEPA 2: Self-Supervised Video Models Enable Understanding, Prediction and Planning
Mahmoud Assran, Adrien Bardes, David Fan, Quentin Garrido, et al. V-jepa 2: Self-supervised video models enable understanding, prediction and planning.arXiv preprint arXiv:2506.09985, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
Self-supervised learning from images with a joint- embedding predictive architecture
Mahmoud Assran, Quentin Duval, Ishan Misra, Piotr Bojanowski, Pascal Vincent, Michael Rabbat, Yann LeCun, and Nicolas Ballas. Self-supervised learning from images with a joint- embedding predictive architecture. InCVPR, pages 15619–15629, 2023
2023
-
[4]
LeJEPA: Provable and Scalable Self-Supervised Learning Without the Heuristics
Randall Balestriero and Yann LeCun. LeJEPA: Provable and scalable self-supervised learning without the heuristics.arXiv preprint arXiv:2511.08544, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[5]
Revisiting feature prediction for learning visual repre- sentations from video.TMLR, 2024
Adrien Bardes, Quentin Garrido, Jean Ponce, Xinlei Chen, Michael Rabbat, Yann LeCun, Mahmoud Assran, and Nicolas Ballas. Revisiting feature prediction for learning visual repre- sentations from video.TMLR, 2024
2024
-
[6]
Dennis, Ashley Edwards, Jack Parker-Holder, Yuge Shi, Edward Hughes, Matthew Lai, Aditi Mavalankar, Richie Steigerwald, Chris Apps, et al
Jake Bruce, Michael D. Dennis, Ashley Edwards, Jack Parker-Holder, Yuge Shi, Edward Hughes, Matthew Lai, Aditi Mavalankar, Richie Steigerwald, Chris Apps, et al. Genie: Generative interactive environments. InICML, pages 4603–4623, 2024
2024
-
[7]
Diffusion forcing: Next-token prediction meets full-sequence diffusion
Boyuan Chen, Diego Marti Monso, Yilun Du, Max Simchowitz, Russ Tedrake, and Vincent Sitzmann. Diffusion forcing: Next-token prediction meets full-sequence diffusion. InNeurIPS, volume 37, pages 24081–24125, 2024
2024
-
[8]
SkyReels-V2: Infinite-length Film Generative Model
Guibin Chen, Dixuan Lin, Jiangping Yang, Chunze Lin, Junchen Zhu, Mingyuan Fan, Hao Zhang, Sheng Chen, Zheng Chen, Chengcheng Ma, et al. SkyReels-V2: Infinite-length film generative model.arXiv preprint arXiv:2504.13074, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[9]
Autoregressive video generation without vector quantization
Haoge Deng, Ting Pan, Haiwen Diao, Zhengxiong Luo, Yufeng Cui, Huchuan Lu, Shiguang Shan, Yonggang Qi, and Xinlong Wang. Autoregressive video generation without vector quantization. InICLR, 2025
2025
-
[10]
Better & faster large language models via multi-token prediction
Fabian Gloeckle, Badr Youbi Idrissi, Baptiste Rozière, David Lopez-Paz, and Gabriel Synnaeve. Better & faster large language models via multi-token prediction. InICML, pages 15706–15734, 2024
2024
-
[11]
LTX-Video: Realtime Video Latent Diffusion
Yoav HaCohen, Nisan Chiprut, Benny Brazowski, Daniel Shalem, Dudu Moshe, Eitan Richard- son, Eran Levin, Guy Shiran, Nir Zabari, Ori Gordon, Poriya Panet, Sapir Weissbuch, Victor Kulikov, Yaki Bitterman, Zeev Melumian, and Ofir Bibi. LTX-Video: Realtime video latent diffusion.arXiv preprint arXiv:2501.00103, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[12]
Masked autoencoders are scalable vision learners
Kaiming He, Xinlei Chen, Saining Xie, Yanghao Li, Piotr Dollár, and Ross Girshick. Masked autoencoders are scalable vision learners. InCVPR, pages 15979–15988, 2022
2022
-
[13]
StreamingT2V: Consistent, dynamic, and extendable long video generation from text
Roberto Henschel, Levon Khachatryan, Hayk Poghosyan, Daniil Hayrapetyan, Vahram Tade- vosyan, Zhangyang Wang, Shant Navasardyan, and Humphrey Shi. StreamingT2V: Consistent, dynamic, and extendable long video generation from text. InCVPR, pages 2568–2577, 2025
2025
-
[14]
Distilling the Knowledge in a Neural Network
Geoffrey Hinton, Oriol Vinyals, and Jeff Dean. Distilling the knowledge in a neural network. arXiv preprint arXiv:1503.02531, 2015
work page internal anchor Pith review Pith/arXiv arXiv 2015
-
[15]
Denoising diffusion probabilistic models
Jonathan Ho, Ajay Jain, and Pieter Abbeel. Denoising diffusion probabilistic models. In NeurIPS, volume 33, pages 6840–6851, 2020
2020
-
[16]
Self forcing: Bridging the train-test gap in autoregressive video diffusion
Xun Huang, Zhengqi Li, Guande He, Mingyuan Zhou, and Eli Shechtman. Self forcing: Bridging the train-test gap in autoregressive video diffusion. InNeurIPS, 2025. 10
2025
-
[17]
VBench: Comprehensive benchmark suite for video generative models
Ziqi Huang, Yinan He, Jiashuo Yu, Fan Zhang, Chenyang Si, Yuming Jiang, Yuanhan Zhang, Tianxing Wu, Qingyang Jin, Nattapol Chanpaisit, Yaohui Wang, Xinyuan Chen, Limin Wang, Dahua Lin, Yu Qiao, and Ziwei Liu. VBench: Comprehensive benchmark suite for video generative models. InCVPR, pages 21807–21818, 2024
2024
-
[18]
Pyramidal flow matching for efficient video generative modeling
Yang Jin, Zhicheng Sun, Ningyuan Li, Kun Xu, Kun Xu, Hao Jiang, Nan Zhuang, Quzhe Huang, Yang Song, Yadong Mu, and Zhouchen Lin. Pyramidal flow matching for efficient video generative modeling. InICLR, 2025
2025
-
[19]
FIFO-Diffusion: Generating infinite videos from text without training
Jihwan Kim, Junoh Kang, Jinyoung Choi, and Bohyung Han. FIFO-Diffusion: Generating infinite videos from text without training. InNeurIPS, volume 37, pages 89834–89868, 2024
2024
-
[20]
HunyuanVideo: A Systematic Framework For Large Video Generative Models
Weijie Kong, Qi Tian, Zijian Zhang, Rox Min, Zuozhuo Dai, Jin Zhou, Jiangfeng Xiong, Xin Li, Bo Wu, Jianwei Zhang, et al. Hunyuanvideo: A systematic framework for large video generative models.arXiv preprint arXiv:2412.03603, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[21]
A path towards autonomous machine intelligence.OpenReview preprint, 2022
Yann LeCun. A path towards autonomous machine intelligence.OpenReview preprint, 2022. Version 0.9.2
2022
-
[22]
Repa-e: Unlocking vae for end-to-end tuning with latent diffusion transformers
Xingjian Leng, Jaskirat Singh, Yunzhong Hou, Zhenchang Xing, Saining Xie, and Liang Zheng. Repa-e: Unlocking vae for end-to-end tuning with latent diffusion transformers. InICCV, pages 18262–18272, 2025
2025
-
[23]
Yaron Lipman, Ricky T. Q. Chen, Heli Ben-Hamu, Maximilian Nickel, and Matt Le. Flow matching for generative modeling. InICLR, 2023
2023
-
[24]
Rolling forcing: Autoregressive long video diffusion in real time
Kunhao Liu, Wenbo Hu, Jiale Xu, Ying Shan, and Shijian Lu. Rolling forcing: Autoregressive long video diffusion in real time. InICLR, 2026
2026
-
[25]
V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al
Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy V . V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision.TMLR, 2024
2024
-
[26]
Scalable diffusion models with transformers
William Peebles and Saining Xie. Scalable diffusion models with transformers. InICCV, pages 4195–4205, 2023
2023
-
[27]
Movie Gen: A Cast of Media Foundation Models
Adam Polyak, Amit Zohar, Andrew Brown, Andros Tjandra, Animesh Sinha, Ann Lee, Apoorv Vyas, Bowen Shi, Chih-Yao Ma, Ching-Yao Chuang, et al. Movie gen: A cast of media foundation models.arXiv preprint arXiv:2410.13720, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[28]
High- resolution image synthesis with latent diffusion models
Robin Rombach, Andreas Blattmann, Dominik Lorenz, Patrick Esser, and Björn Ommer. High- resolution image synthesis with latent diffusion models. InCVPR, pages 10684–10695, 2022
2022
-
[29]
FitNets: Hints for thin deep nets
Adriana Romero, Nicolas Ballas, Samira Ebrahimi Kahou, Antoine Chassang, Carlo Gatta, and Yoshua Bengio. FitNets: Hints for thin deep nets. InICLR, 2015
2015
-
[30]
Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole
Yang Song, Jascha Sohl-Dickstein, Diederik P. Kingma, Abhishek Kumar, Stefano Ermon, and Ben Poole. Score-based generative modeling through stochastic differential equations. InICLR, 2021
2021
-
[31]
MAGI-1: Autoregressive Video Generation at Scale
Hansi Teng, Hongyu Jia, Lei Sun, Lingzhi Li, Maolin Li, Mingqiu Tang, Shuai Han, Tianning Zhang, W.Q. Zhang, Weifeng Luo, et al. MAGI-1: Autoregressive video generation at scale. arXiv preprint arXiv:2505.13211, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[32]
Diffusion models are real-time game engines
Dani Valevski, Yaniv Leviathan, Moab Arar, and Shlomi Fruchter. Diffusion models are real-time game engines. InICLR, 2025
2025
-
[33]
Wan: Open and Advanced Large-Scale Video Generative Models
Ang Wang, Baole Ai, Bin Wen, Chaojie Mao, Chen-Wei Xie, Di Chen, Feiwu Yu, Haiming Zhao, Jianxiao Yang, Jianyuan Zeng, et al. Wan: Open and advanced large-scale video generative models.arXiv preprint arXiv:2503.20314, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[34]
Vidprom: A million-scale real prompt-gallery dataset for text-to- video diffusion models
Wenhao Wang and Yi Yang. Vidprom: A million-scale real prompt-gallery dataset for text-to- video diffusion models. InNeurIPS, volume 37, pages 65618–65642, 2024. 11
2024
-
[35]
Cogvideox: Text-to-video diffusion models with an expert transformer
Zhuoyi Yang, Jiayan Teng, Wendi Zheng, Ming Ding, Shiyu Huang, Jiazheng Xu, Yuanming Yang, Wenyi Hong, Xiaohan Zhang, Guanyu Feng, et al. Cogvideox: Text-to-video diffusion models with an expert transformer. InICLR, 2025
2025
-
[36]
Tianwei Yin, Michaël Gharbi, Taesung Park, Richard Zhang, Eli Shechtman, Frédo Durand, and William T. Freeman. Improved distribution matching distillation for fast image synthesis. InNeurIPS, volume 37, pages 47455–47487, 2024
2024
-
[37]
Freeman, and Taesung Park
Tianwei Yin, Michaël Gharbi, Richard Zhang, Eli Shechtman, Frédo Durand, William T. Freeman, and Taesung Park. One-step diffusion with distribution matching distillation. In CVPR, pages 6613–6623, 2024
2024
-
[38]
Freeman, Frédo Durand, Eli Shechtman, and Xun Huang
Tianwei Yin, Qiang Zhang, Richard Zhang, William T. Freeman, Frédo Durand, Eli Shechtman, and Xun Huang. From slow bidirectional to fast autoregressive video diffusion models. In CVPR, pages 22963–22974, 2025
2025
-
[39]
Representation alignment for generation: Training diffusion transformers is easier than you think
Sihyun Yu, Sangkyung Kwak, Huiwon Jang, Jongheon Jeong, Jonathan Huang, Jinwoo Shin, and Saining Xie. Representation alignment for generation: Training diffusion transformers is easier than you think. InICLR, 2025
2025
-
[40]
Mirai: Autoregressive Visual Generation Needs Foresight
Yonghao Yu, Lang Huang, Zerun Wang, Runyi Li, and Toshihiko Yamasaki. Mirai: Autoregres- sive visual generation needs foresight.arXiv preprint arXiv:2601.14671, 2026
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[41]
Hongzhou Zhu, Min Zhao, Guande He, Hang Su, Chongxuan Li, and Jun Zhu. Causal forcing: Autoregressive diffusion distillation done right for high-quality real-time interactive video generation.arXiv preprint arXiv:2602.02214, 2026. 12 Appendix A Implementation Details Model architecture.The causal generator backbone is Wan2.1-T2V-1.3B [ 33]: 30 transformer...
work page internal anchor Pith review Pith/arXiv arXiv 2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.