On the gain of entrainment in stable linear control systems with a nonlinear output
Pith reviewed 2026-06-26 07:42 UTC · model grok-4.3
The pith
Convex nonlinear outputs produce nonnegative gain of entrainment for any periodic input in stable linear systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In an asymptotically stable linear system the gain of entrainment for a static nonlinear output equals the difference between the time-average of the output along the unique periodic solution entrained by a T-periodic input and the value of the output at the equilibrium produced by the constant input equal to the average of that periodic input. For twice-differentiable outputs the leading-order term is determined by the Hessian of the output evaluated along the equilibrium trajectory. When the output is convex on the controllable subspace this difference is nonnegative for every periodic input and equals the average Bregman divergence between the entrained orbit and the averaged equilibrium.
What carries the argument
The average Bregman divergence between the entrained periodic orbit and the equilibrium for the averaged input, which encodes the mismatch created by nonlinearity and determines the sign of GOE.
If this is right
- GOE is nonnegative for every periodic input whenever the output is convex on the controllable subspace.
- For quadratic output maps, GOE admits explicit frequency-domain formulas that isolate the contribution of each input harmonic.
- These formulas yield necessary and sufficient conditions on the output coefficients that fix the sign of GOE and identify the periodic input that maximizes GOE under an energy constraint.
- The same conclusions apply to concrete models such as an RLC circuit and a compartmental pharmacodynamic system with nonlinear drug-effect map.
Where Pith is reading between the lines
- Engineers could deliberately shape the nonlinearity of a sensor or actuator map to amplify or suppress the average response to known periodic disturbances.
- The Bregman-divergence representation may link entrainment analysis to convex optimization or information-geometric methods applied to dynamical systems.
- Analogous sign results might hold for discrete-time linear systems or for systems whose state equations are themselves mildly nonlinear, though these cases lie outside the present analysis.
Load-bearing premise
The linear system is asymptotically stable, guaranteeing a unique entrained periodic orbit for any periodic input.
What would settle it
An asymptotically stable linear system together with a convex output map on its controllable subspace and a periodic input for which the numerically computed gain of entrainment is negative.
Figures


read the original abstract
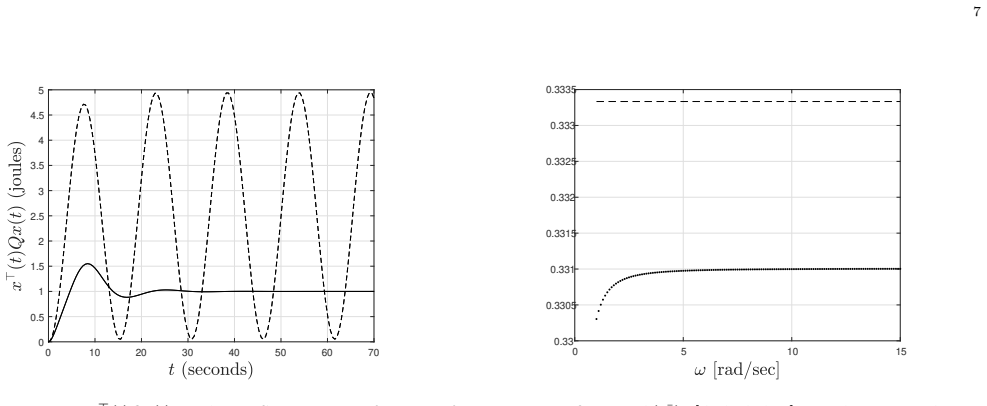
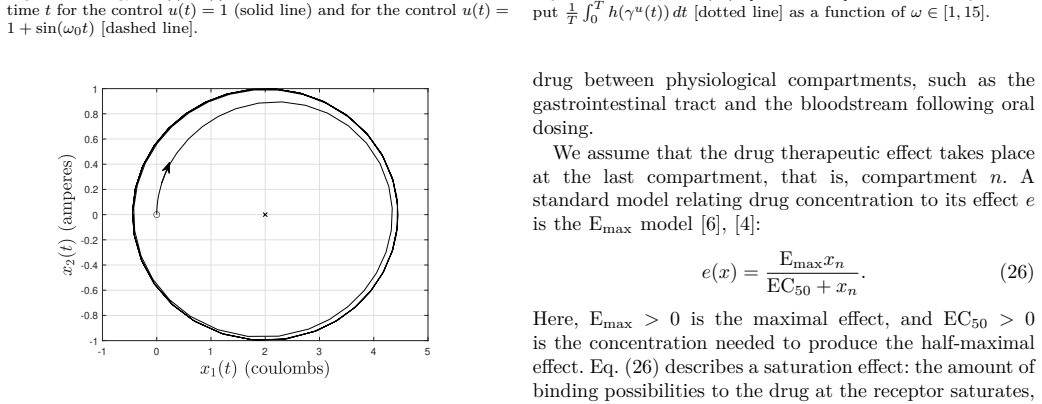
A control system admits a positive gain of entrainment (GOE) if entrainment to a periodic input yields a larger output, on average, than the output generated by the corresponding constant input with the same mean value. We analyze GOE in continuous-time stable linear control systems with a static nonlinear output map. Although linear systems with linear outputs have zero GOE, we show that a nonlinear output may generate a nontrivial GOE through the mismatch between the average output along the entrained periodic orbit and the output evaluated at the corresponding averaged equilibrium. We derive a second-order characterization of GOE for smooth output maps revealing that the leading-order contribution is determined by the curvature of the output map. We then show that if the output is convex (concave) on the controllable subspace, then GOE is nonnegative (nonpositive) for every periodic input. Furthermore, GOE admits a natural geometric interpretation as the average Bregman divergence between the entrained periodic orbit and the equilibrium associated with the averaged input. For the special case of quadratic output functions, we derive explicit frequency-domain formulas for GOE. These yield necessary and sufficient conditions guaranteeing the sign of GOE, characterize the contribution of individual input harmonics, and lead to an optimal periodic excitation that maximizes GOE under an energy constraint. The theoretical results are illustrated using an electrical RLC circuit and a compartmental pharmacodynamic model with a nonlinear drug-effect map.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper analyzes the gain of entrainment (GOE) in asymptotically stable linear systems ˙x = Ax + Bu with static nonlinear output y = h(x). It shows that GOE vanishes for linear h but arises from the mismatch between the time-average of h along the unique entrained periodic orbit and h evaluated at the equilibrium for the averaged input. A second-order Taylor expansion characterizes the leading term via the Hessian of h. The central result is that convexity (concavity) of h on the controllable subspace implies GOE ≥ 0 (GOE ≤ 0) for every periodic input, with GOE equal to the average Bregman divergence between the orbit and the averaged equilibrium. For quadratic h, explicit frequency-domain formulas are derived that give necessary and sufficient sign conditions, decompose the contribution of input harmonics, and yield an optimal periodic excitation maximizing GOE under an energy constraint. The theory is illustrated on an RLC circuit and a compartmental pharmacodynamic model.
Significance. If the derivations hold, the manuscript supplies a matrix-based, parameter-free criterion linking output convexity to entrainment benefits, together with a geometric Bregman-divergence interpretation and computable frequency-domain expressions for the quadratic case. The restriction of convexity to the controllable subspace is sharp, and the averaging argument (integrating the dynamics over one period) is standard yet cleanly applied. These elements provide both theoretical clarity and design tools for periodic inputs in applications with nonlinear output maps.
minor comments (2)
- [Abstract] Abstract: the phrase 'second-order characterization' is used without indicating the precise order of the Taylor expansion or the remainder term; a parenthetical reference to the relevant equation in §3 would clarify the leading-order claim.
- [§4] §4 (quadratic case): the frequency-domain expression for GOE is stated in integral form; an explicit invocation of Parseval's theorem or the inner-product representation used to obtain the sum over harmonics would make the derivation self-contained.
Simulated Author's Rebuttal
We thank the referee for the careful reading, accurate summary of the contributions, and the recommendation of minor revision. We are pleased that the significance of the convexity criterion, Bregman-divergence interpretation, and frequency-domain formulas for the quadratic case was recognized.
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The central claims follow directly from integrating the linear dynamics over one period (yielding avg(x) equal to the equilibrium for avg(u)) and applying the definition of Bregman divergence for a convex output map on the controllable subspace. These steps use only the system equations, the convexity assumption, and standard properties of averages and divergences; they do not reduce to fitted parameters, self-citations, or ansatzes imported from prior work by the same authors. The frequency-domain formulas for the quadratic case are likewise explicit matrix expressions derived from the same linear system. No load-bearing step matches any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The linear system is asymptotically stable
- domain assumption The output map is static and twice continuously differentiable
Reference graph
Works this paper leans on
-
[1]
Contraction methods for non- linear systems: A brief introduction and some open problems,
Z. Aminzare and E. D. Sontag, “Contraction methods for non- linear systems: A brief introduction and some open problems,” in Proc. 53rd IEEE Conf. on Decision and Control, Los Angeles, CA, 2014, pp. 3835–3847
2014
-
[2]
Monotone control systems,
D. Angeli and E. Sontag, “Monotone control systems,” IEEE Trans. Automat. Control, vol. 48, no. 10, pp. 1684–1698, 2003
2003
-
[3]
The relaxation method of finding the com- mon point of convex sets and its application to the solution of problems in convex programming,
L. M. Bregman, “The relaxation method of finding the com- mon point of convex sets and its application to the solution of problems in convex programming,” USSR Computational Mathematics and Mathematical Physics, vol. 7, pp. 200–217, 1967
1967
-
[4]
Optimal designs for the emax, log-linear and exponential models,
H. Dette, C. Kiss, M. Bevanda, and F. Bretz, “Optimal designs for the emax, log-linear and exponential models,” Biometrika, vol. 97, no. 2, pp. 513–518, 2010
2010
-
[5]
Farina and S
L. Farina and S. Rinaldi, Positive Linear Systems: Theory and Applications. John Wiley, 2000
2000
-
[6]
Mechanism- based pharmacodynamic modeling,
M. A. Felmlee, M. E. Morris, and D. E. Mager, “Mechanism- based pharmacodynamic modeling,” in Computational Toxicol- ogy: Volume I, B. Reisfeld and A. N. Mayeno, Eds. Totowa, NJ: Humana Press, 2012, pp. 583–600
2012
-
[7]
Giri and E.-W
F. Giri and E.-W. Bai, Eds., Block-oriented Nonlinear System Identification, ser. Lecture Notes in Control and Information Sciences. London: Springer, 2010, vol. 404
2010
-
[8]
Haag, Modelling with the Master Equation: Solution Meth- ods and Applications in Social and Natural Sciences
G. Haag, Modelling with the Master Equation: Solution Meth- ods and Applications in Social and Natural Sciences. Cham, Switzerland: Springer, 2017
2017
-
[9]
On the gain of entrainment in a class of weakly contractive bilinear control systems,
R. Katz, T. Kriecherbauer, L. Grüne, and M. Margaliot, “On the gain of entrainment in a class of weakly contractive bilinear control systems,” SIAM J. Control and Optimization, vol. 62, no. 5, pp. 2723–2749, 2024
2024
-
[10]
Mathematical concepts in pharma- cokinetics and pharmacodynamics with application to tumor growth,
G. Koch and J. Schropp, “Mathematical concepts in pharma- cokinetics and pharmacodynamics with application to tumor growth,” in Nonautonomous Dynamical Systems in the Life Sci- ences, P. E. Kloeden and C. Pötzsche, Eds. Cham, Switzerland: Springer International Publishing, 2013, pp. 225–250
2013
-
[11]
Cycle affinity and winding localize eigenvalues of Markov generators
A. Kolchinsky, N. Ohga, and S. Ito, “Cycle affinity and winding localize eigenvalues of Markov generators,” 2026. [Online]. A vailable:https://arxiv.org/abs/2605.15884
work page internal anchor Pith review Pith/arXiv arXiv 2026
-
[12]
Entrainment in the master equation,
M. Margaliot, L. Grune, and T. Kriecherbauer, “Entrainment in the master equation,” Royal Society open science, vol. 5, no. 4, p. 172157, 2018
2018
-
[13]
Entrainment to periodic initiation and transition rates in a computational model for gene translation,
M. Margaliot, E. D. Sontag, and T. Tuller, “Entrainment to periodic initiation and transition rates in a computational model for gene translation,” PLoS ONE, vol. 9, no. 5, p. e96039, 2014
2014
-
[14]
Stability analysis of the ribosome flow model,
M. Margaliot and T. Tuller, “Stability analysis of the ribosome flow model,” IEEE/ACM Trans. Comput. Biol. Bioinform., vol. 9, no. 5, pp. 1545–1552, 2012
2012
-
[15]
Frequency-domain identification of photosynthetic regulation under fluctuating light,
L. Nedbal, “Frequency-domain identification of photosynthetic regulation under fluctuating light,” bioRxiv, 2026. [Online]. A vailable: https://www.biorxiv.org/content/early/ 2026/05/11/2026.05.06.722921
2026
-
[16]
Subharmonics and chaos in simple periodically forced biomolecular models,
E. Nikolaev, S. Rahi, and E. D. Sontag, “Subharmonics and chaos in simple periodically forced biomolecular models,” Bio- physical Journal, vol. 114, no. 5, pp. 1232–1240, 2018
2018
-
[17]
On the gain of entrainment in the n-dimensional ribosome flow model,
R. Ofir, T. Kriecherbauer, L. Grüne, and M. Margaliot, “On the gain of entrainment in the n-dimensional ribosome flow model,” J. R. Soc. Interface, vol. 20, p. 20220763, 2023
2023
-
[18]
A model for competition for ribosomes in the cell,
A. Raveh, M. Margaliot, E. Sontag, and T. Tuller, “A model for competition for ribosomes in the cell,” J. R. Soc. Interface, vol. 13, no. 116, p. 20151062, 2016
2016
-
[19]
Global en- trainment of transcriptional systems to periodic inputs,
G. Russo, M. di Bernardo, and E. D. Sontag, “Global en- trainment of transcriptional systems to periodic inputs,” PLOS Comput. Biol., vol. 6, no. 4, pp. 1–26, 04 2010
2010
-
[20]
E. D. Sontag, Mathematical Control Theory: Deterministic Finite Dimensional Systems, 2nd ed. New York: Springer, 1998
1998
-
[21]
On logarithmic norms,
T. Ström, “On logarithmic norms,” SIAM J. Numerical Analy- sis, vol. 12, no. 5, pp. 741–753, 1975
1975
-
[22]
Linearly stable subharmonic orbits in strongly monotone time-periodic dynamical systems,
P. Takáč, “Linearly stable subharmonic orbits in strongly monotone time-periodic dynamical systems,” Proc. American Mathematical Society, vol. 115, no. 3, pp. 691–698, 1992
1992
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.