Eye Gaze-Informed and Context-Aware Pedestrian Trajectory Prediction in Shared Spaces with Automated Shuttles: A Virtual Reality Study
Pith reviewed 2026-05-25 06:25 UTC · model grok-4.3
The pith
Eye gaze and situational context provide complementary information that reduces pedestrian trajectory prediction error by 8.47% in VR encounters with automated shuttles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
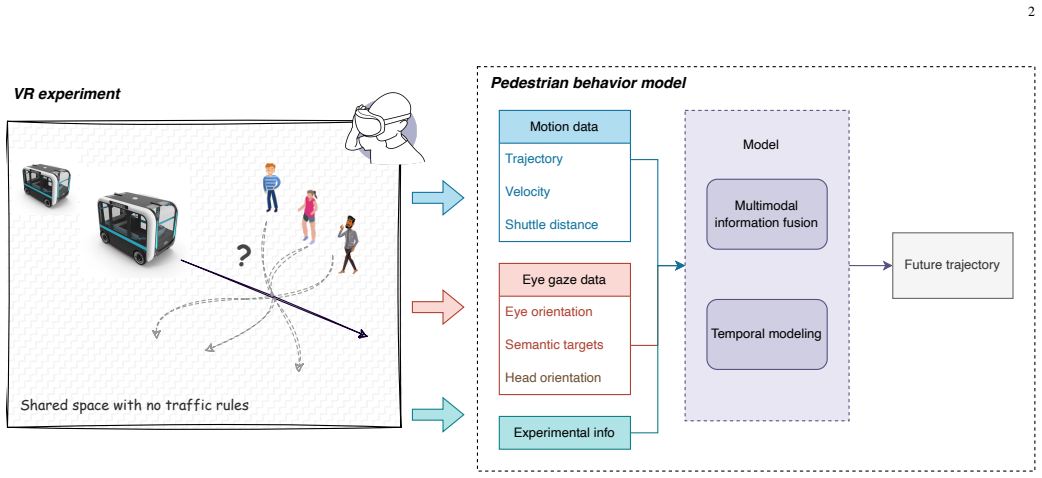
In a virtual reality setup with pedestrians facing shuttles at 45, 90, and 135 degree approaches and varying traffic, eye gaze data fused with motion and context through modality-specific encoders improves trajectory prediction. Gaze information proves angle-dependent, with continuous orientation outperforming categorical labels, and the joint use of gaze and situational context cuts final displacement error by 8.47 percent, almost matching the additive effect of each alone.
What carries the argument
A multi-modal prediction model with modality-specific encoders that integrates eye gaze, head orientation, motion, and situational context for pedestrian trajectory forecasting.
Load-bearing premise
Virtual reality produces eye gaze and movement patterns that match real-world pedestrian interactions with automated shuttles.
What would settle it
A real-world field study measuring whether adding eye gaze tracking to shuttle prediction models achieves a similar 8.47% reduction in final displacement error.
Figures







read the original abstract
To address this gap, we conduct a Virtual Reality experiment in which pedestrians interact with automated shuttles under varying approach angles (45{\deg}, 90{\deg}, 135{\deg}) and continuous-traffic conditions (single shuttle, two shuttles with 3 or 5-second gaps), collecting synchronized motion, eye gaze, and head orientation data. To investigate to what extent, under what conditions, and in what form fine-grained eye gaze is informative for pedestrian motion prediction, we develop a multi-modal prediction model that fuses these signals through modality-specific encoders, and systematically ablate gaze representations against head orientation and situational context. We report three main results. First, the predictive value of eye gaze is angle-dependent and tightly coupled with eye-head-body coordination: at acute angles where pedestrians actively redirect gaze to acquire the shuttle, eye gaze carries information that head orientation alone misses. Second, continuous gaze orientation outperforms categorical semantic fixation labels, with the optimal encoding frame (global or body-relative) depending on whether gaze is used alone or jointly with context. Third, eye gaze and situational context provide complementary predictive information: their combination reduces final displacement error (FDE) by 8.47%, close to the sum of their individual contributions. Together, these findings highlight the value of incorporating human perceptual signals into pedestrian behavior prediction and motivate a human-centered complement to vehicle-centric modeling approaches. Our code is available at https://github.com/danyayay/GazeX.git.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes a Virtual Reality study where pedestrians interact with automated shuttles in scenarios with varying approach angles (45°, 90°, 135°) and traffic conditions. Synchronized data on motion, eye gaze, and head orientation is collected. A multi-modal model fuses these signals via modality-specific encoders, and ablations are performed against head orientation and situational context. Three main findings are reported: angle-dependent value of eye gaze tied to coordination, superiority of continuous gaze orientation over categorical labels, and complementarity of gaze and context yielding an 8.47% FDE reduction approximately additive.
Significance. If the reported ablation outcomes are statistically robust, this work contributes to pedestrian trajectory prediction by demonstrating the utility of fine-grained eye gaze data, particularly its complementarity with context and dependence on interaction geometry. The public release of code at https://github.com/danyayay/GazeX.git supports reproducibility and is a positive aspect. The findings motivate incorporating human perceptual signals into models for shared spaces with automated vehicles.
major comments (2)
- [Abstract] Abstract: The quantitative claim that combining eye gaze and situational context reduces FDE by 8.47% (close to the sum of individual contributions) is presented without error bars, participant count, statistical significance tests, or details on the model architecture, training procedure, or ablation implementation, making it impossible to assess the reliability or robustness of this central numerical result.
- [Results paragraph] Results paragraph: The claim that the ablation results 'motivate a human-centered complement to vehicle-centric modeling approaches' for deployed shuttles assumes that VR gaze and movement patterns generalize to real-world pedestrian-shuttle encounters, yet no validation, sensitivity analysis, or discussion of differences due to absent physical threat or altered visual fidelity at the tested angles is provided.
minor comments (1)
- [Abstract] Abstract: The description of the model as using 'modality-specific encoders' and 'systematically ablate gaze representations' would benefit from a brief clarification of the fusion mechanism and the exact gaze encodings tested, even at the abstract level.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each major comment point-by-point below, indicating where revisions will be made to improve clarity and completeness.
read point-by-point responses
-
Referee: [Abstract] Abstract: The quantitative claim that combining eye gaze and situational context reduces FDE by 8.47% (close to the sum of individual contributions) is presented without error bars, participant count, statistical significance tests, or details on the model architecture, training procedure, or ablation implementation, making it impossible to assess the reliability or robustness of this central numerical result.
Authors: We agree that the abstract would benefit from additional supporting details for the central 8.47% FDE claim. In the revised manuscript, we will add the participant count and explicitly reference the sections describing the model architecture, training procedure, ablation implementation, and statistical tests. Error bars and full numerical results with significance values are already reported in the results section and figures; we will note this in the abstract. Due to strict length constraints, we cannot embed the complete ablation tables or error bars directly in the abstract but will ensure the claim is properly contextualized. revision: partial
-
Referee: [Results paragraph] Results paragraph: The claim that the ablation results 'motivate a human-centered complement to vehicle-centric modeling approaches' for deployed shuttles assumes that VR gaze and movement patterns generalize to real-world pedestrian-shuttle encounters, yet no validation, sensitivity analysis, or discussion of differences due to absent physical threat or altered visual fidelity at the tested angles is provided.
Authors: We acknowledge that the manuscript would be strengthened by a more explicit discussion of VR-to-real-world generalizability. While a limitations section exists, we will expand it to address the absence of physical threat, potential differences in visual fidelity at the tested angles (45°, 90°, 135°), and the lack of direct real-world validation or sensitivity analysis. The study is positioned as a controlled VR investigation to isolate eye-gaze contributions; we will clarify that the motivational claim for deployed systems is forward-looking and contingent on future real-world confirmation. This addition will be made without overstating the current evidence. revision: yes
Circularity Check
Empirical ablation study with no circular derivation chain
full rationale
The paper reports results from a VR experiment and systematic ablations on a multi-modal trajectory prediction model. The key claim (8.47% FDE reduction from gaze+context fusion) is a measured empirical outcome on held-out data, not a quantity derived by construction from model definitions, fitted parameters renamed as predictions, or self-citation chains. No equations, uniqueness theorems, or ansatzes appear that reduce the reported complementarity to inputs internal to the same study. The work is self-contained against external benchmarks via code release and data collection protocol.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Pedestrian- vehicle interaction in shared space: Insights for autonomous vehicles,
Y . Wang, L. Hespanhol, S. Worrall, and M. Tomitsch, “Pedestrian- vehicle interaction in shared space: Insights for autonomous vehicles,” inProceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, 2022, pp. 330–339
work page 2022
-
[2]
Pedes- trian trajectory prediction in pedestrian-vehicle mixedenvironments: A systematic review,
M. Golchoubian, M. Ghafurian, K. Dautenhahn, and N. L. Azad, “Pedes- trian trajectory prediction in pedestrian-vehicle mixedenvironments: A systematic review,”IEEE Transactions on Intelligent Transportation Systems, 2023
work page 2023
-
[3]
Y . Feng, Z. Xu, H. Farah, and B. van Arem, “Does another pedestrian matter? a virtual reality study on the interaction between multiple pedes- trians and autonomous vehicles in shared space,”IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 1, pp. 196–209, 2025
work page 2025
-
[4]
D. Yang, L. Li, K. Redmill, and Ü. Özgüner, “Top-view trajectories: A pedestrian dataset of vehicle-crowd interaction from controlled ex- periments and crowded campus,” in2019 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2019, pp. 899–904
work page 2019
-
[5]
D. Li, W. Mao, F. C. Pereira, Y . Xiao, X. Su, and R. Krueger, “Analyzing the behaviors of pedestrians and cyclists in interactions with autonomous systems using controlled experiments: A literature review,” Transportation Research Part F: Traffic Psychology and Behaviour, vol. 114, pp. 270–307, 2025. 14
work page 2025
-
[6]
T. De Ceunynck, B. Pelssers, T. Bjørnskau, O. Aasvik, A. Fyhri, A. Lau- reshyn, C. Johnsson, M. Hagenzieker, and H. Martensen, “Interact or counteract? Behavioural observation of interactions between vulnerable road users and autonomous shuttles in Oslo, Norway,”Traffic Safety Research, vol. 2, August 2022
work page 2022
-
[7]
R. Woodman, K. Lu, M. D. Higgins, S. Brewerton, P. A. Jennings, and S. Birrell, “Gap acceptance study of pedestrians crossing between pla- tooning autonomous vehicles in a virtual environment,”Transportation Research Part F: Traffic Psychology and Behaviour, Nov. 2019
work page 2019
-
[8]
A. Andrijanto, Z. Chen, T. Kodama, H. Yano, and M. Itoh, “Application of LargeSpace for investigating pedestrians’ behaviors when interacting with autonomous vehicles in shared spaces,” inProceedings - 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops, VRW 2022, 2022
work page 2022
-
[9]
Data collec- tion methods for studying pedestrian behaviour: A systematic review,
Y . Feng, D. Duives, W. Daamen, and S. Hoogendoorn, “Data collec- tion methods for studying pedestrian behaviour: A systematic review,” Building and Environment, vol. 187, p. 107329, 2021
work page 2021
-
[10]
M. Land and B. Tatler,Looking and acting: vision and eye movements in natural behaviour. Oxford University Press, 2009
work page 2009
-
[11]
A. E. Patla and J. N. Vickers, “How far ahead do we look when required to step on specific locations in the travel path during locomotion?” Experimental brain research, vol. 148, no. 1, pp. 133–138, 2003
work page 2003
-
[12]
The where, what and when of gaze allocation in the lab and the natural environment,
T. Foulsham, E. Walker, and A. Kingstone, “The where, what and when of gaze allocation in the lab and the natural environment,”Vision research, vol. 51, no. 17, pp. 1920–1931, 2011
work page 1920
-
[13]
MX-LSTM: Mixing tracklets and vislets to jointly forecast trajectories and head poses,
I. Hasan, F. Setti, T. Tsesmelis, A. Del Bue, F. Galasso, and M. Cristani, “MX-LSTM: Mixing tracklets and vislets to jointly forecast trajectories and head poses,” in2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Salt Lake City, UT: IEEE, Jun. 2018, pp. 6067–6076
work page 2018
-
[14]
D. A. Ridel, N. Deo, D. Wolf, and M. Trivedi, “Understanding pedestrian-vehicle interactions with vehicle mounted vision: An LSTM model and empirical analysis,” in2019 IEEE Intelligent Vehicles Sym- posium (IV), Jun. 2019, pp. 913–918
work page 2019
-
[15]
Pedestrian behavior prediction for automated driving: Requirements, metrics, and relevant features,
M. Herman, J. Wagner, V . Prabhakaran, N. Möser, H. Ziesche, W. Ahmed, L. Bürkle, E. Kloppenburg, and C. Gläser, “Pedestrian behavior prediction for automated driving: Requirements, metrics, and relevant features,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 9, pp. 14 922–14 937, Sep. 2022
work page 2022
-
[16]
Multi-agent trajectory prediction with heterogeneous edge-enhanced graph attention network,
X. Mo, Z. Huang, Y . Xing, and C. Lv, “Multi-agent trajectory prediction with heterogeneous edge-enhanced graph attention network,”IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 9554–9567, 2022
work page 2022
-
[17]
Are they going to cross? A benchmark dataset and baseline for pedestrian crosswalk behavior,
A. Rasouli, I. Kotseruba, and J. K. Tsotsos, “Are they going to cross? A benchmark dataset and baseline for pedestrian crosswalk behavior,” inProceedings of the IEEE international conference on computer vision workshops, 2017, pp. 206–213
work page 2017
-
[18]
Do pedestrians pay attention? Eye contact detection in the wild,
Y . Belkada, L. Bertoni, R. Caristan, T. Mordan, and A. Alahi, “Do pedestrians pay attention? Eye contact detection in the wild,” Dec. 2021, arXiv:2112.04212 [cs]
-
[19]
Pedestrian’s gaze object detection in traffic scene,
H. Murakami, J. Chen, D. Deguchi, T. Hirayama, Y . Kawanishi, and H. Murase, “Pedestrian’s gaze object detection in traffic scene,” in Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications. Rome, Italy: SCITEPRESS - Science and Technology Publications, 2024, pp. 333–340
work page 2024
-
[20]
Collaborative motion prediction via neural motion message passing,
Y . Hu, S. Chen, Y . Zhang, and X. Gu, “Collaborative motion prediction via neural motion message passing,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 6319– 6328
work page 2020
-
[21]
Motion style transfer: Modular low-rank adaptation for deep motion forecasting,
P. Kothari, D. Li, Y . Liu, and A. Alahi, “Motion style transfer: Modular low-rank adaptation for deep motion forecasting,” inConference on Robot Learning. PMLR, 2023, pp. 774–784
work page 2023
-
[22]
Socialcvae: Predicting pedestrian trajectory via interaction conditioned latents,
W. Xiang, Y . Haoteng, H. Wang, and X. Jin, “Socialcvae: Predicting pedestrian trajectory via interaction conditioned latents,” inProceedings of the AAAI Conference on Artificial Intelligence, vol. 38, no. 6, 2024, pp. 6216–6224
work page 2024
-
[23]
GroupNet: Multiscale hypergraph neural networks for trajectory prediction with relational reasoning,
C. Xu, M. Li, Z. Ni, Y . Zhang, and S. Chen, “GroupNet: Multiscale hypergraph neural networks for trajectory prediction with relational reasoning,” Apr. 2022, arXiv:2204.08770 [cs]
-
[24]
From goals, waypoints & paths to long term human trajectory forecasting,
K. Mangalam, Y . An, H. Girase, and J. Malik, “From goals, waypoints & paths to long term human trajectory forecasting,” inProceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 15 233–15 242
work page 2021
-
[25]
Context-aware multi-task learning for pedestrian intent and trajectory prediction,
F. Munir and T. P. Kucner, “Context-aware multi-task learning for pedestrian intent and trajectory prediction,”Transportation Research Part C: Emerging Technologies, vol. 178, p. 105203, 2025
work page 2025
-
[26]
A context-aware pedestrian trajectory prediction framework for automated vehicles,
A. Kalatian and B. Farooq, “A context-aware pedestrian trajectory prediction framework for automated vehicles,”Transportation Research Part C: Emerging Technologies, vol. 134, January 2022
work page 2022
-
[27]
Cross or wait? Predicting pedestrian interaction outcomes at unsignalized crossings,
C. Zhang, A. H. Kalantari, Y . Yang, Z. Ni, G. Markkula, N. Merat, and C. Berger, “Cross or wait? Predicting pedestrian interaction outcomes at unsignalized crossings,” in2023 IEEE Intelligent Vehicles Symposium (IV). IEEE, 2023, pp. 1–8
work page 2023
-
[28]
Research on a pedestrian crossing intention recognition model based on natural observation data,
H. Zhang, Y . Liu, C. Wang, R. Fu, Q. Sun, and Z. Li, “Research on a pedestrian crossing intention recognition model based on natural observation data,”Sensors, vol. 20, no. 6, p. 1776, 2020
work page 2020
-
[29]
W. Zhan, L. Sun, D. Wang, H. Shi, A. Clausse, M. Naumann, J. Küm- merle, H. Königshof, C. Stiller, A. de La Fortelle, and M. Tomizuka, “INTERACTION dataset: An international, adversarial and cooperative motion dataset in interactive driving scenarios with semantic maps,” arXiv:1910.03088 [cs, eess], Sep. 2019
-
[30]
Large scale interactive motion forecasting for autonomous driving: The waymo open motion dataset,
S. Ettinger, S. Cheng, B. Caine, C. Liu, H. Zhao, S. Pradhan, Y . Chai, B. Sapp, C. R. Qi, Y . Zhouet al., “Large scale interactive motion forecasting for autonomous driving: The waymo open motion dataset,” inProceedings of the IEEE/CVF international conference on computer vision, 2021, pp. 9710–9719
work page 2021
-
[31]
nuscenes: A multimodal dataset for autonomous driving,
H. Caesar, V . Bankiti, A. H. Lang, S. V ora, V . E. Liong, Q. Xu, A. Krishnan, Y . Pan, G. Baldan, and O. Beijbom, “nuscenes: A multimodal dataset for autonomous driving,” inProceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2020, pp. 11 621–11 631
work page 2020
-
[32]
PIE: A large-scale dataset and models for pedestrian intention estimation and trajectory prediction,
A. Rasouli, I. Kotseruba, T. Kunic, and J. K. Tsotsos, “PIE: A large-scale dataset and models for pedestrian intention estimation and trajectory prediction,” inInternational Conference on Computer Vision (ICCV), 2019
work page 2019
-
[33]
F. Pascucci, N. Rinke, C. Schiermeyer, V . Berkhahn, and B. Friedrich, “A discrete choice model for solving conflict situations between pedestrians and vehicles in shared space,” Sep. 2017
work page 2017
-
[34]
Developing and testing robust autonomy: The university of sydney campus data set,
W. Zhou, J. S. Berrio, C. De Alvis, M. Shan, S. Worrall, J. Ward, and E. Nebot, “Developing and testing robust autonomy: The university of sydney campus data set,”IEEE Intelligent Transportation Systems Magazine, vol. 12, no. 4, pp. 23–40, 2020
work page 2020
-
[35]
Robotic etiquette: Results from user studies involving a fetch and carry task,
M. L. Walters, K. Dautenhahn, S. N. Woods, and K. L. Koay, “Robotic etiquette: Results from user studies involving a fetch and carry task,” in Proceedings of the ACM/IEEE international conference on Human-robot interaction, 2007, pp. 317–324
work page 2007
-
[36]
Proac- tive behavior of an autonomous mobile robot for human-assisted learn- ing,
A. Garrell, M. Villamizar, F. Moreno-Noguer, and A. Sanfeliu, “Proac- tive behavior of an autonomous mobile robot for human-assisted learn- ing,” in2013 IEEE RO-MAN. IEEE, 2013, pp. 107–113
work page 2013
-
[37]
Pedestrian behavior in shared spaces with autonomous vehicles: An integrated framework and review,
M. Prédhumeau, A. Spalanzani, and J. Dugdale, “Pedestrian behavior in shared spaces with autonomous vehicles: An integrated framework and review,”IEEE Transactions on Intelligent Vehicles, vol. 8, no. 1, January 2023
work page 2023
-
[38]
J. P. Nuñez Velasco, H. Farah, B. van Arem, and M. P. Hagenzieker, “Studying pedestrians’ crossing behavior when interacting with auto- mated vehicles using virtual reality,”Transportation Research Part F: Traffic Psychology and Behaviour, vol. 66, October 2019
work page 2019
-
[39]
S. Hochreiter and J. Schmidhuber, “Long short-term memory,”Neural computation, vol. 9, no. 8, pp. 1735–1780, 1997
work page 1997
-
[40]
A conceptual model of conflicts in shared spaces,
S. Hossain, F. T. Johora, J. P. Müller, and S. Hartmann, “A conceptual model of conflicts in shared spaces,” inProceedings of the 6th Inter- national Conference on Industrial and Business Engineering, 2020, pp. 228–235
work page 2020
-
[41]
Agent- based modeling for predicting pedestrian trajectories around an au- tonomous vehicle,
M. Prédhumeau, L. Mancheva, J. Dugdale, and A. Spalanzani, “Agent- based modeling for predicting pedestrian trajectories around an au- tonomous vehicle,”Journal of Artificial Intelligence Research, vol. 73, pp. 1385–1433, 2022
work page 2022
-
[42]
Simulation of pedestrian interaction with autonomous vehicles via social force model,
M. M. Rashid, M. Seyedi, and S. Jung, “Simulation of pedestrian interaction with autonomous vehicles via social force model,”Simulation modelling practice and theory, vol. 132, p. 102901, 2024
work page 2024
-
[43]
Off the beaten sidewalk: Pedestrian prediction in shared spaces for autonomous vehi- cles,
C. Anderson, R. Vasudevan, and M. Johnson-Roberson, “Off the beaten sidewalk: Pedestrian prediction in shared spaces for autonomous vehi- cles,”IEEE Robotics and Automation Letters, vol. 5, no. 4, pp. 6892– 6899, Oct. 2020
work page 2020
-
[44]
E. P. Kampitakis, P. Fafoutellis, G.-M. Oprea, and E. I. Vlahogianni, “Shared space multi-modal traffic modeling using lstm networks with repulsion map and an intention-based multi-loss function,”Transporta- tion Research Part C: Emerging Technologies, vol. 150, p. 104104, 2023
work page 2023
-
[45]
Modeling mixed traffic in shared space using LSTM with probability density mapping,
H. Cheng and M. Sester, “Modeling mixed traffic in shared space using LSTM with probability density mapping,” in2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2018, pp. 3898–3904. 15
work page 2018
-
[46]
A deep learning framework for modeling pedestrian-vehicle interactions in shared space,
P. Fafoutellis, E. P. Kampitakis, and E. I. Vlahogianni, “A deep learning framework for modeling pedestrian-vehicle interactions in shared space,” in2023 8th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS). IEEE, 2023, pp. 1–6
work page 2023
-
[47]
B. Yang, S. Yan, Z. Wang, and K. Nakano, “Prediction based trajec- tory planning for safe interactions between autonomous vehicles and moving pedestrians in shared spaces,”IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 10, pp. 10 513–10 524, 2023
work page 2023
-
[48]
F. T. Johora, H. Cheng, J. P. Müller, and M. Sester, “An agent-based model for trajectory modelling in shared spaces: A combination of expert-based and deep learning approaches,” inProceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, 2020, pp. 1878–1880
work page 2020
-
[49]
A hierarchical forecasting model of pedestrian crossing behavior for autonomous vehicle,
G. Yang, E. J. L. Pulgarin, and G. Herrmann, “A hierarchical forecasting model of pedestrian crossing behavior for autonomous vehicle,”IEEE Access, vol. 12, pp. 9025–9037, 2024
work page 2024
-
[50]
Eye tracking in virtual reality: A broad review of applications and challenges,
I. B. Adhanom, P. MacNeilage, and E. Folmer, “Eye tracking in virtual reality: A broad review of applications and challenges,”Virtual Reality, vol. 27, no. 2, pp. 1481–1505, 2023
work page 2023
-
[51]
Modeling eye gaze velocity trajectories using GANs with spectral loss for enhanced fidelity,
S. Bhandari, P. Lencastre, R. Mathema, A. Szorkovszky, A. Yazidi, and P. G. Lind, “Modeling eye gaze velocity trajectories using GANs with spectral loss for enhanced fidelity,”Scientific Reports, vol. 15, no. 1, p. 19929, 2025
work page 2025
-
[52]
Eye- tracking training improves the learning and memory of children with learning difficulty,
A. S. Chan, T.-L. Lee, S. L. Sze, N. S. Yang, and Y . M. Han, “Eye- tracking training improves the learning and memory of children with learning difficulty,”Scientific Reports, vol. 12, no. 1, p. 13974, 2022
work page 2022
-
[53]
T. Chen, P. Samaranayake, X. Cen, M. Qi, and Y .-C. Lan, “The impact of online reviews on consumers’ purchasing decisions: Evidence from an eye-tracking study,”Frontiers in Psychology, vol. 13, p. 865702, 2022
work page 2022
-
[54]
S. C. Boerman and C. M. Müller, “Understanding which cues people use to identify influencer marketing on instagram: An eye tracking study and experiment,”International Journal of Advertising, vol. 41, no. 1, pp. 6–29, 2022
work page 2022
-
[55]
Z. Liu, Z. Yang, Y . Gu, H. Liu, and P. Wang, “The effectiveness of eye tracking in the diagnosis of cognitive disorders: A systematic review and meta-analysis,”PloS one, vol. 16, no. 7, p. e0254059, 2021
work page 2021
-
[56]
K. Kim, Y . K. Lee, H. Ahn, S. Hahn, and S. Oh, “Pedestrian intention prediction for autonomous driving using a multiple stakeholder perspec- tive model,” in2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Oct. 2020, pp. 7957–7962
work page 2020
-
[57]
M. Lanzer, I. Koniakowsky, M. Colley, and M. Baumann, “Interaction effects of pedestrian behavior, smartphone distraction and external communication of automated vehicles on crossing and gaze behavior,” inProceedings of the 2023 CHI Conference on Human Factors in Computing Systems, April 2023
work page 2023
-
[58]
Two-step communication for the interaction between automated vehicles and pedestrians,
J. Bindschädel, I. Krems, and A. Kiesel, “Two-step communication for the interaction between automated vehicles and pedestrians,”Transporta- tion Research Part F: Traffic Psychology and Behaviour, vol. 90, 2022
work page 2022
-
[59]
Active vehicle pitch motion for communication in automated driving,
J. Bindschädel, I. Krems, and A. Kiesel, “Active vehicle pitch motion for communication in automated driving,”Transportation Research Part F: Traffic Psychology and Behaviour, vol. 87, May 2022
work page 2022
-
[60]
Cell phone conversations and child pedestrian’s crossing behavior: A simulator study,
H. Tapiro, T. Oron-Gilad, and Y . Parmet, “Cell phone conversations and child pedestrian’s crossing behavior: A simulator study,”Safety Science, vol. 89, November 2016
work page 2016
-
[61]
——, “Pedestrian distraction: the effects of road environment complexity and age on pedestrian’s visual attention and crossing behavior,”Journal of Safety Research, vol. 72, February 2020
work page 2020
-
[62]
Does crossing the road in a group in- fluence pedestrians’ gaze behavior?
M. Lanzer and M. Baumann, “Does crossing the road in a group in- fluence pedestrians’ gaze behavior?”Proceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 64, no. 1, December 2020
work page 2020
-
[63]
A. Sobhani and B. Farooq, “Impact of smartphone distraction on pedes- trians’ crossing behaviour: An application of head-mounted immersive virtual reality,”Transportation Research Part F: Traffic Psychology and Behaviour, vol. 58, October 2018
work page 2018
-
[64]
Predicting locomotion intention using eye movements and EEG with LSTM and Transformers,
G. Bremer and M. Lappe, “Predicting locomotion intention using eye movements and EEG with LSTM and Transformers,” in2024 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Oct. 2024, pp. 21–30
work page 2024
-
[65]
Predicting future position from natural walking and eye movements with machine learning,
G. Bremer, N. Stein, and M. Lappe, “Predicting future position from natural walking and eye movements with machine learning,” in2021 IEEE international conference on artificial intelligence and virtual reality (AIVR). IEEE, 2021, pp. 19–28
work page 2021
-
[66]
Eye tracking-based LSTM for locomotion prediction in VR,
N. Stein, G. Bremer, and M. Lappe, “Eye tracking-based LSTM for locomotion prediction in VR,” in2022 IEEE conference on virtual reality and 3D user interfaces (VR). IEEE, 2022, pp. 493–503
work page 2022
-
[67]
Gaitway: Gait data-vased VR locomotion prediction system robust to visual distraction,
Y . Kim, S. Hwang, J. Oh, and S. Kim, “Gaitway: Gait data-vased VR locomotion prediction system robust to visual distraction,” inExtended Abstracts of the CHI Conference on Human Factors in Computing Systems, 2024, pp. 1–8
work page 2024
-
[68]
F-RDW: Redirected walking with forecasting future position,
S.-B. Jeon, J. Jung, J. Park, and I.-K. Lee, “F-RDW: Redirected walking with forecasting future position,”IEEE Transactions on Visualization and Computer Graphics, vol. 31, no. 4, pp. 1970–1984, Apr. 2025
work page 1970
-
[69]
Y . Feng, H. Farah, and B. van Arem, “Effect of ehmi on pedestrian road crossing behavior in shared space with automated vehicles-a virtual reality study,” in2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2023, pp. 2038–2043
work page 2023
-
[70]
External hmi for self- driving vehicles: Which information shall be displayed?
S. M. Faas, L.-A. Mathis, and M. Baumann, “External hmi for self- driving vehicles: Which information shall be displayed?”Transportation research part F: traffic psychology and behaviour, vol. 68, pp. 171–186, 2020
work page 2020
-
[71]
Autonomous vehicles that interact with pedestrians: A survey of theory and practice,
A. Rasouli and J. K. Tsotsos, “Autonomous vehicles that interact with pedestrians: A survey of theory and practice,”IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 3, pp. 900–918, Mar. 2020
work page 2020
-
[72]
M. D. McKay, R. J. Beckman, and W. J. Conover, “A comparison of three methods for selecting values of input variables in the analysis of output from a computer code,”Technometrics, 1979
work page 1979
-
[73]
Simulator sickness questionnaire: An enhanced method for quantifying simulator sickness,
R. S. Kennedy, N. E. Lane, K. S. Berbaum, and M. G. Lilienthal, “Simulator sickness questionnaire: An enhanced method for quantifying simulator sickness,”The International Journal of Aviation Psychology, vol. 3, no. 3, pp. 203–220, Jul. 1993
work page 1993
-
[74]
The factor structure of the presence questionnaire,
B. G. Witmer, C. J. Jerome, and M. J. Singer, “The factor structure of the presence questionnaire,”Presence: Teleoperators and Virtual Environments, vol. 14, no. 3, pp. 298–312, Jun. 2005
work page 2005
-
[75]
S. Deb, L. Strawderman, D. W. Carruth, J. DuBien, B. Smith, and T. M. Garrison, “Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles,”Transportation Research Part C: Emerging Technologies, Nov. 2017
work page 2017
-
[76]
Fully automated driving: Impact of trust and practice on manual control recovery,
W. Payre, J. Cestac, and P. Delhomme, “Fully automated driving: Impact of trust and practice on manual control recovery,”Human Factors, vol. 58, no. 2, pp. 229–241, Mar. 2016
work page 2016
-
[77]
J. Bindschädel, I. Krems, and A. Kiesel, “Interaction between pedes- trians and automated vehicles: Exploring a motion-based approach for virtual reality experiments,”Transportation Research Part F: Traffic Psychology and Behaviour, vol. 82, pp. 316–332, 2021
work page 2021
-
[78]
Uncovering and ad- dressing blink-related challenges in using eye tracking for interactive systems,
J. W. Grootjen, H. Weingärtner, and S. Mayer, “Uncovering and ad- dressing blink-related challenges in using eye tracking for interactive systems,” inProceedings of the 2024 CHI Conference on Human Factors in Computing Systems, ser. CHI ’24. New York, NY , USA: Association for Computing Machinery, May 2024, pp. 1–23
work page 2024
-
[79]
Identifying fixations and saccades in eye-tracking protocols,
D. D. Salvucci and J. H. Goldberg, “Identifying fixations and saccades in eye-tracking protocols,” inProceedings of the 2000 symposium on Eye tracking research & applications, 2000, pp. 71–78
work page 2000
-
[80]
H. R. Schiffman,Sensation and perception: An integrated approach. John Wiley & Sons, 1990
work page 1990
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.