3D Spatial Pattern Matching
Pith reviewed 2026-06-26 03:07 UTC · model grok-4.3
The pith
Spatial pattern matching extends to 3D by generalizing the definition and applying subgraph matching on distance relations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We extend spatial pattern matching to 3 dimensions and provide a generalized definition of the problem. We describe a subgraph matching algorithm capable of resolving 3D spatial patterns over distance relations and release two 3D spatial pattern matching datasets, one synthetic and one containing real 3D building data from the city of Hamburg, Germany. We test our subgraph matching algorithm on both datasets and present results as a baseline for future methods to build upon.
What carries the argument
A subgraph matching algorithm that resolves 3D spatial patterns over distance relations between entities.
If this is right
- Queries for similar regions or housing can now incorporate vertical separation between entities.
- Landmark and road-network searches gain the ability to distinguish patterns that differ only in height.
- The released synthetic and Hamburg datasets become reference collections for measuring future 3D methods.
- The subgraph algorithm supplies an initial performance reference against which later improvements can be compared.
Where Pith is reading between the lines
- The same distance-based subgraph technique might transfer to other volumetric domains such as molecular structures or drone-captured city models.
- Additional geometric constraints beyond distance, for example orientation or line-of-sight, could be layered on the existing machinery without changing its core structure.
- Large-scale city models will likely require efficiency improvements once the number of entities exceeds the size of the Hamburg test set.
Load-bearing premise
That the main shortcoming of two-dimensional framing is simply the missing height coordinate and that extending subgraph matching directly to three-dimensional distances will suffice without further 3D constraints.
What would settle it
Execute the algorithm on the Hamburg building dataset and compare its returned patterns against manual inspection of the same 3D coordinates; systematic mismatches between algorithm output and human judgment on height-aware patterns would refute the claim.
Figures
read the original abstract
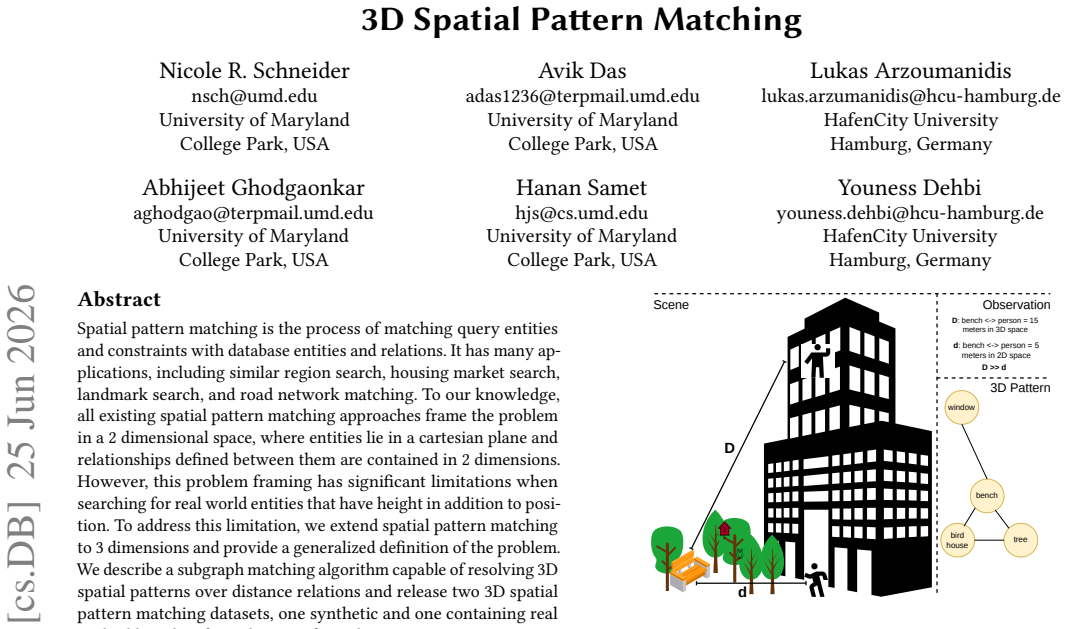
Spatial pattern matching is the process of matching query entities and constraints with database entities and relations. It has many applications, including similar region search, housing market search, landmark search, and road network matching. To our knowledge, all existing spatial pattern matching approaches frame the problem in a 2 dimensional space, where entities lie in a cartesian plane and relationships defined between them are contained in 2 dimensions. However, this problem framing has significant limitations when searching for real world entities that have height in addition to position. To address this limitation, we extend spatial pattern matching to 3 dimensions and provide a generalized definition of the problem. We describe a subgraph matching algorithm capable of resolving 3D spatial patterns over distance relations and release two 3D spatial pattern matching datasets, one synthetic and one containing real 3D building data from the city of Hamburg, Germany. We test our subgraph matching algorithm on both datasets and present results as a baseline for future methods to build upon.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends spatial pattern matching from 2D to 3D by providing a generalized problem definition, describing a subgraph matching algorithm over distance relations for 3D patterns, releasing a synthetic dataset and a real-world dataset of 3D buildings from Hamburg, Germany, and presenting baseline experimental results on both.
Significance. If the algorithm correctly handles 3D geometric realizations and scales to realistic entity counts, the work would supply a useful baseline and open datasets for 3D spatial querying in database systems, with potential applications in GIS and urban analytics. The dataset releases constitute a concrete contribution independent of the algorithmic claims.
major comments (2)
- [Abstract] Abstract: the claim that the subgraph matching algorithm 'resolves 3D spatial patterns over distance relations' does not indicate any mechanism for pruning or enforcing uniqueness among the multiple non-isometric realizations possible in 3D (e.g., chiral pairs or non-coplanar tetrahedra) that are absent from 2D distance graphs; without such handling the 3D extension is incomplete.
- [Experiments] Experiments / Hamburg dataset: no complexity bound, pruning strategy, or runtime scaling results are supplied for the real 3D building data, leaving open whether the method remains tractable once entity counts exceed toy sizes; this directly affects the claim that the algorithm provides a usable baseline.
minor comments (1)
- [Abstract] The abstract states that results are presented 'as a baseline' but does not report any quantitative metrics (precision, recall, runtime); adding these numbers would improve clarity.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We respond to each major comment below, indicating planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that the subgraph matching algorithm 'resolves 3D spatial patterns over distance relations' does not indicate any mechanism for pruning or enforcing uniqueness among the multiple non-isometric realizations possible in 3D (e.g., chiral pairs or non-coplanar tetrahedra) that are absent from 2D distance graphs; without such handling the 3D extension is incomplete.
Authors: We agree the abstract phrasing is imprecise. The algorithm performs subgraph matching on a distance graph and returns all embeddings satisfying the distance constraints; it does not include pruning or uniqueness enforcement for non-isometric 3D realizations such as chiral pairs. This follows directly from defining the problem solely via distance relations. We will revise the abstract to state the algorithm's scope explicitly and note that multiple realizations may exist in 3D. revision: yes
-
Referee: [Experiments] Experiments / Hamburg dataset: no complexity bound, pruning strategy, or runtime scaling results are supplied for the real 3D building data, leaving open whether the method remains tractable once entity counts exceed toy sizes; this directly affects the claim that the algorithm provides a usable baseline.
Authors: The experiments report baseline runtimes on the released Hamburg data but omit explicit complexity bounds, pruning details beyond standard subgraph matching, and scaling curves. The approach uses backtracking over distance constraints and is exponential in pattern size in the worst case. We will add a complexity discussion and scaling experiments on the synthetic dataset with increasing entity counts to better substantiate tractability for the baseline claim. revision: yes
Circularity Check
No circularity; purely definitional and algorithmic contribution
full rationale
The paper extends an existing problem definition to 3D, describes a subgraph-matching algorithm over distance relations, and releases two datasets. No equations, fitted parameters, predictions, or self-citations appear in the provided text. The central claims rest on new definitions and an algorithm description rather than any reduction to prior inputs or self-referential steps. This is the expected non-finding for a paper whose contribution is definitional and empirical rather than a derived result.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Nguyen, Lara Johannsen, Filip Rothaut, Weilian Li, and Youness Dehbi
Lukas Arzoumanidis, Son H. Nguyen, Lara Johannsen, Filip Rothaut, Weilian Li, and Youness Dehbi. 2025. Object Detection for the Enrichment of Semantic 3D City Models with Roofing Materials.ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information SciencesX-4/W6-2025 (2025), 9–16. doi:10.5194/ isprs-annals-X-4-W6-2025-9-2025
2025
-
[2]
Lukas Arzoumanidis, Al Maimun As Samee, Elmehdi Kanna, Son Nguyen, and Youness Dehbi. 2026. Domain-Adaptive Object Detection for Enriching Semantic 4https://github.com/tum-gis/3dcitykg 5https://zenodo.org/records/18896614 6https://metaver.de/trefferanzeige?docuuid=24513F73-D928-450C-A334- E30037945729&q=Baeume%20Hamburg Synthetic Sparse Medium Dense |𝐷|Ti...
arXiv 2026
-
[3]
Hongmei Chen, Yixiang Fang, Ying Zhang, Wenjie Zhang, and Lizhen Wang
-
[4]
ESPM: Efficient spatial pattern matching.IEEE Transactions on Knowledge and Data Engineering32, 6 (2019), 1227–1233
2019
-
[5]
Yue Chen, Kaiyu Feng, Gao Cong, and Han Mao Kiah. 2022. Example-based spatial pattern matching.Proceedings of the VLDB Endowment15, 11 (2022), 2572–2584
2022
-
[6]
Paolo Ciaccia, Marco Patella, and Pavel Zezula. 1997. M-tree: An E cient access method for similarity search in metric spaces. InProceedings of the 23rd VLDB conference, Athens, Greece. 426–435
1997
-
[7]
Yixiang Fang, Reynold Cheng, Gao Cong, Nikos Mamoulis, and Yun Li. 2018. On spatial pattern matching. In2018 IEEE 34th International Conference on Data Engineering (ICDE). IEEE, 293–304
2018
-
[8]
Yixiang Fang, Reynold Cheng, Jikun Wang, Lukito Budiman, Gao Cong, and Nikos Mamoulis. 2018. SpaceKey: exploring patterns in spatial databases. In2018 IEEE 34th International Conference on Data Engineering (ICDE). IEEE, 1577–1580
2018
-
[9]
Yixiang Fang, Yun Li, Reynold Cheng, Nikos Mamoulis, and Gao Cong. 2019. Evaluating pattern matching queries for spatial databases.The VLDB Journal28 (2019), 649–673
2019
-
[10]
Kolbe, Claus Nagel, and Karl-Heinz Häfele
Gerhard Gröger, Thomas H. Kolbe, Claus Nagel, and Karl-Heinz Häfele. 2012. OGC City Geography Markup Language (CityGML) Encoding Standard. Open Geospatial Consortium (OGC). OGC 12-019, Version 2.0.0, International Standard
2012
-
[11]
Siqiang Luo, Jiafeng Hu, Reynold Cheng, Jing Yan, and Ben Kao. 2017. Seq: Example-based query for spatial objects. InProceedings of the 2017 ACM on Conference on Information and Knowledge Management. 2179–2182
2017
-
[12]
Donald Meagher. 1982. Geometric modeling using octree encoding.Computer graphics and image processing19, 2 (1982), 129–147
1982
-
[13]
2024.Automatic Detection and Interpretation of Changes in Massive Semantic 3D City Models
Huynh Duc An Son Nguyen. 2024.Automatic Detection and Interpretation of Changes in Massive Semantic 3D City Models. Ph. D. Dissertation. Technical University of Munich. https://mediatum.ub.tum.de/1748695
arXiv 2024
-
[14]
Schneider, Aleeza Rasheed, and Hanan Samet
Kent O’Sullivan, Nicole R. Schneider, Aleeza Rasheed, and Hanan Samet. 2023. GESTALT: Geospatially Enhanced Search with Terrain Augmented Location Targeting. InProceedings of the 2nd ACM SIGSPATIAL International Workshop on Searching and Mining Large Collections of Geospatial Data(Hamburg, Germany) (GeoSearch’23). Association for Computing Machinery
2023
-
[15]
Schneider, and Hanan Samet
Kent O’Sullivan, Nicole R. Schneider, and Hanan Samet. 2023. COMPASS: Cardi- nal Orientation Manipulation and Pattern-Aware Spatial Search. InProceedings of the 2nd ACM SIGSPATIAL International Workshop on Searching and Mining Large Collections of Geospatial Data(Hamburg, Germany)(GeoSearch’23). Association for Computing Machinery
2023
-
[16]
2006.Foundations of multidimensional and metric data structures
Hanan Samet. 2006.Foundations of multidimensional and metric data structures. Morgan Kaufmann
2006
-
[17]
Nicole R. Schneider, Kent O’Sullivan, and Hanan Samet. 2024. Graph-based Spatial Pattern Matching: A Theoretical Comparison. InProceedings of the 32nd ACM International Conference on Advances in Geographic Information Systems (Atlanta, GA, USA)(SIGSPATIAL ’24). Association for Computing Machinery, New York, NY, USA, 505–508. doi:10.1145/3678717.3691227
-
[18]
Schneider, Kent O’Sullivan, and Hanan Samet
Nicole R. Schneider, Kent O’Sullivan, and Hanan Samet. 2024. The Future of Graph-based Spatial Pattern Matching (Vision Paper). In40th IEEE International Conference on Data Engineering, ICDE 2024 – SEAGraph Workshop. IEEE, IEEE, Utrecht, Netherlands, 360–364
2024
-
[19]
Wenzhao Tang, Weihang Li, Xiucheng Liang, Olaf Wysocki, Filip Biljecki, Christoph Holst, and Boris Jutzi. 2025. Texture2LoD3: Enabling LoD3 Building Re- construction With Panoramic Images. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops. 2041–2051
2025
-
[20]
Yianilos
Peter N. Yianilos. 1993. Data structures and algorithms for nearest neighbor search in general metric spaces. InProceedings of the Fourth Annual ACM-SIAM Symposium on Discrete Algorithms(Austin, Texas, USA)(SODA ’93). Society for Industrial and Applied Mathematics, USA, 311–321
1993
-
[21]
Hanyuan Zhang, Siqiang Luo, Jieming Shi, Jing Nathan Yan, and Weiwei Sun
-
[22]
In2022 IEEE 38th International 3D Spatial Pattern Matching Conference on Data Engineering (ICDE)
Example-based Spatial Search at Scale. In2022 IEEE 38th International 3D Spatial Pattern Matching Conference on Data Engineering (ICDE). 539–551. doi:10.1109/ICDE53745.2022. 00045
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.