Decentralized Geometric Control for Cable-Suspended Payload Transport with Adaptive Mass Estimation
Pith reviewed 2026-07-02 21:55 UTC · model grok-4.3
The pith
N quadrotors transport a cable-suspended payload by each estimating its load share from local cable measurements alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
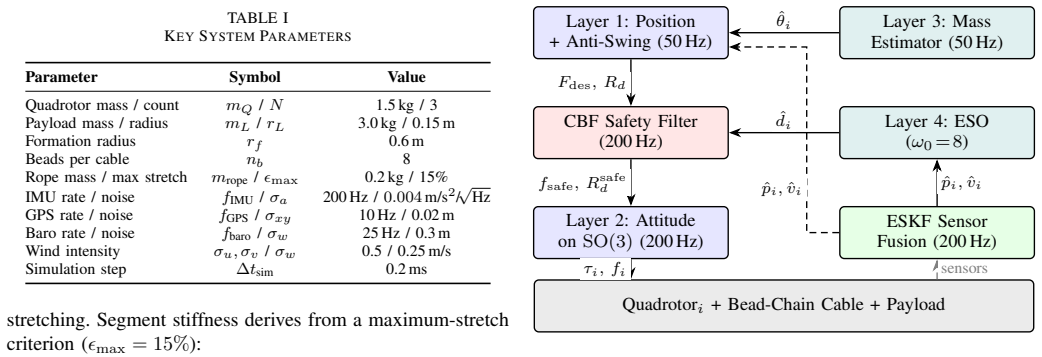
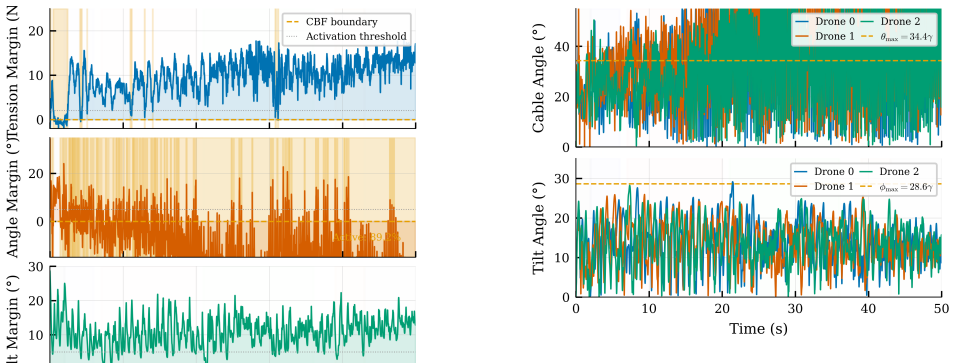
GPAC enables N quadrotors to transport a cable-suspended payload without central coordination or exchange of cable states or adaptive parameters. Each quadrotor estimates its effective load share from local cable measurements so combined forces converge to the correct total, the payload position is reconstructed locally from each agent's own cable geometry, and the only inter-agent communication is a low-rate neighbor-position broadcast for collision avoidance. The architecture integrates geometric control, anti-swing regulation, extended-state observation for wind, concurrent-learning mass estimation without persistent excitation, and a priority-ordered CBF-inspired safety filter that prese
What carries the argument
Implicit coordination via independent load-share estimation from local cable measurements inside a four-layer hierarchical geometric control architecture with priority-ordered CBF safety filter.
If this is right
- Combined forces from all quadrotors converge to the payload weight without any agent knowing N or the mass value.
- Each quadrotor reconstructs the payload position from its own local cable geometry.
- Inter-agent communication reduces to low-rate neighbor-position broadcasts used only for collision avoidance.
- The priority-ordered safety filter maintains input-to-state safety margins and keeps desired attitudes inside the SO(3) controller's almost-global stability region under single-constraint activation.
Where Pith is reading between the lines
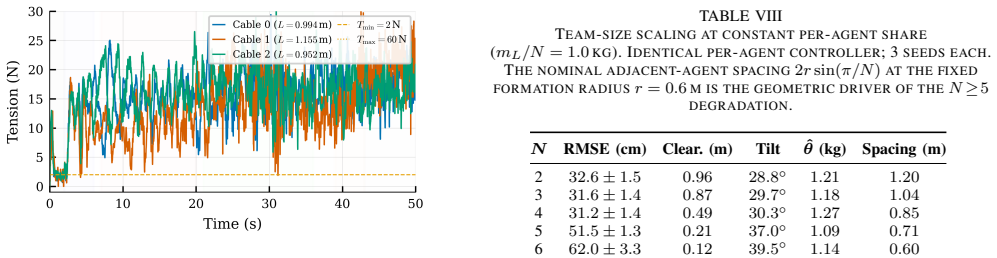
- The absence of any requirement to know N suggests the same local-estimation mechanism could support teams whose size changes during a mission.
- Because payload state is reconstructed locally, the architecture may extend to tasks where global position information is intermittently unavailable.
- Closing all loops through the onboard estimator in the reported simulations indicates the method can tolerate realistic sensor fusion noise and wind turbulence.
Load-bearing premise
Local cable tension and geometry measurements are accurate enough for each quadrotor to estimate its load share so the summed forces equal the payload weight without any agent knowing N or the mass.
What would settle it
A closed-loop experiment in which the sum of the independently estimated load shares deviates from the true payload weight by more than the observer error bound, resulting in sustained altitude drift or failure to track the reference trajectory.
Figures
read the original abstract
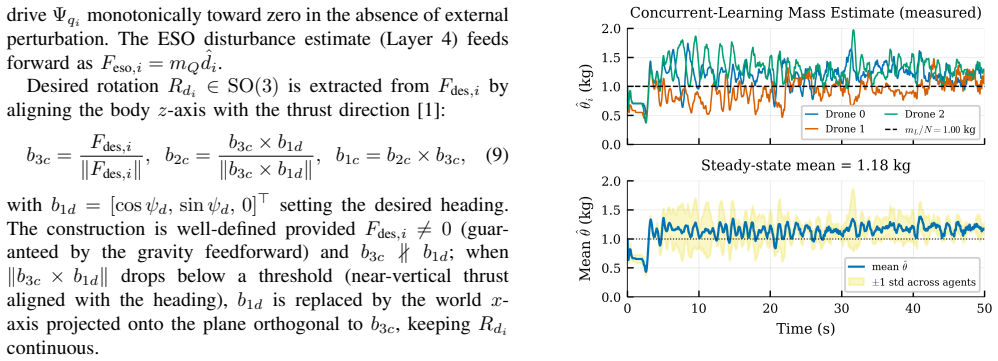
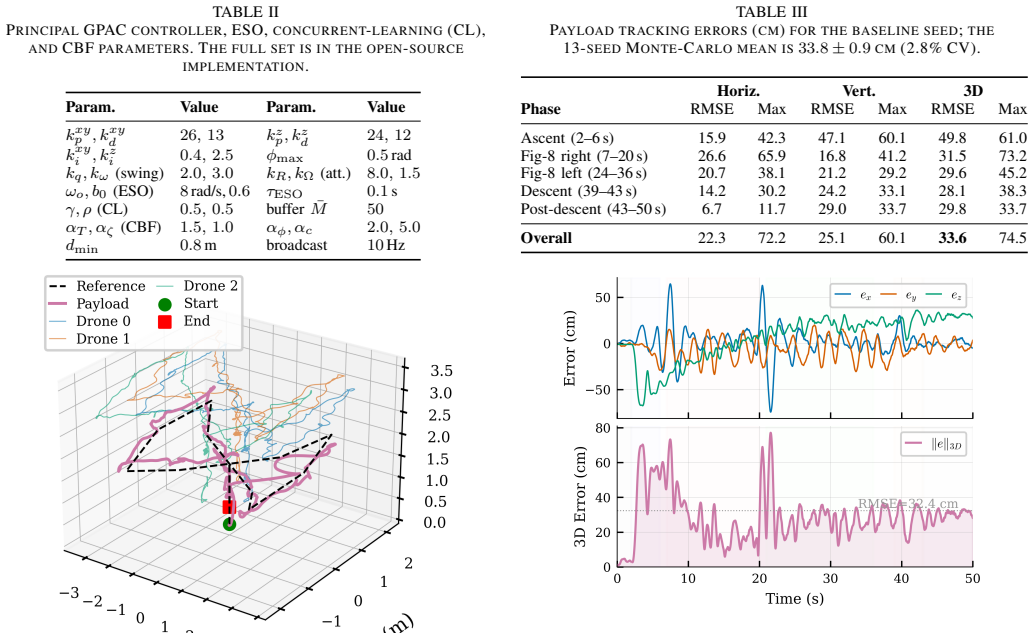
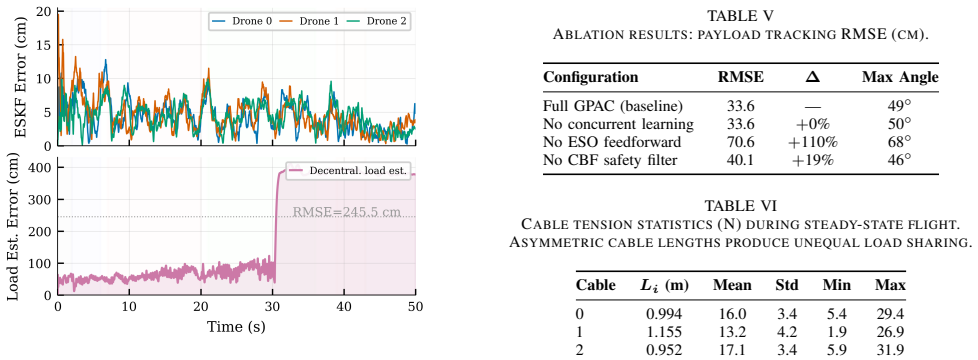
Cooperative aerial transport requires controllers that respect nonlinear manifold geometry, operate without centralized coordination, and respect operational safety constraints. To address these demands, we present GPAC, a four-layer hierarchical architecture that enables $N$ quadrotors to transport a cable-suspended payload without a central coordinator or by exchanging cable states or adaptive parameters. The key insight is implicit coordination: each quadrotor independently estimates its effective load share from local cable measurements, so combined forces converge to the correct total, even without knowledge of $N$ or the payload mass; the payload position is reconstructed locally from each agent's own cable geometry, and the only inter-agent communication is a low-rate neighbor-position broadcast for collision avoidance. GPAC operates directly on the full nonlinear configuration manifold and integrates geometric position and attitude control, anti-swing regulation, an extended-state observer for wind rejection, concurrent learning-based mass estimation without persistent excitation, and a priority-ordered control barrier function (CBF)-inspired safety filter that reduces operational risk, with input-to-state safety (ISSf) margins that hold exactly under single-constraint activation. A compatibility result shows that the filter's force modifications keep the desired attitude within the almost-global stability region of the $\mathrm{SO}(3)$ attitude controller. Finally, high-fidelity simulation with flexible cables, onboard sensor fusion, and wind turbulence -- with all control and estimation loops closed through the estimator -- yields a mean payload-tracking RMSE of 33.8 cm (2.8\% coefficient of variation over 13 seeds) at a low per-agent computational cost.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces GPAC, a four-layer decentralized hierarchical architecture enabling N quadrotors to transport a cable-suspended payload without a central coordinator or exchange of cable states/adaptive parameters. Each agent performs local load-share estimation from cable tension/geometry measurements (via concurrent learning without persistent excitation), reconstructs payload position locally, applies geometric position/attitude control with anti-swing regulation and extended-state observer for wind, and uses a priority-ordered CBF safety filter. A compatibility result shows the filter preserves the almost-global stability region of the SO(3) attitude controller under single-constraint activation. High-fidelity simulations with flexible cables, sensor fusion, and turbulence report mean payload-tracking RMSE of 33.8 cm (2.8% CV over 13 seeds) at low per-agent compute cost.
Significance. If the local estimation rules provably ensure that the vector sum of the N independent load-share estimates equals the true payload weight mg without knowledge of N or m, this would constitute a meaningful advance in scalable, communication-light cooperative aerial transport by removing the need for global parameters or centralized fusion. The empirical results under realistic conditions (flexible cables, wind, onboard sensing) provide supporting evidence of practical viability, and the explicit compatibility result for the safety filter strengthens the safety claims relative to many geometric-control papers that omit such analysis.
major comments (1)
- [§4] §4 (Concurrent-Learning Load-Share Estimator): The central implicit-coordination claim requires that the sum of the N local estimates converges to mg independent of N. The manuscript states this occurs via the observer dynamics but does not supply the summation of the local error equations or a Lyapunov argument establishing global consistency from purely local information; without this step the force-balance property remains an assertion rather than a derived result.
minor comments (2)
- [§6] The simulation section reports RMSE and CV but does not tabulate per-seed values or provide the exact wind-turbulence spectrum and cable-stiffness parameters used, which would aid reproducibility.
- [§3] Notation for the effective load share λ_i and the reconstructed payload position p_L is introduced without an explicit cross-reference to the measurement model (cable direction and tension) used to compute them.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the implicit-coordination property. The comment correctly identifies that an explicit derivation of the summed estimator dynamics would make the force-balance claim fully rigorous rather than asserted. We will revise the manuscript to supply this derivation.
read point-by-point responses
-
Referee: [§4] §4 (Concurrent-Learning Load-Share Estimator): The central implicit-coordination claim requires that the sum of the N local estimates converges to mg independent of N. The manuscript states this occurs via the observer dynamics but does not supply the summation of the local error equations or a Lyapunov argument establishing global consistency from purely local information; without this step the force-balance property remains an assertion rather than a derived result.
Authors: We agree that the summation step and collective Lyapunov argument are missing from the current text. In the revised §4 we will insert a dedicated subsection that (i) writes the error dynamics for each local concurrent-learning estimator, (ii) sums these N equations to obtain a collective error system whose right-hand side depends only on the total tension vector (which equals mg at equilibrium), and (iii) constructs a composite Lyapunov function V = Σ V_i whose derivative is negative semi-definite independently of N. The resulting argument shows global convergence of the summed estimates to mg using only local measurements and without any agent knowing N or m. This addition directly addresses the referee’s concern and strengthens the central claim of the paper. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper presents a new four-layer GPAC architecture relying on local cable measurements for independent load-share estimation and payload-position reconstruction, with concurrent-learning observers and geometric controllers developed from first principles on the configuration manifold. No load-bearing step reduces by the paper's equations or self-citations to a fitted input renamed as prediction, nor does any uniqueness theorem or ansatz smuggle in prior author work as an external fact. The reported simulation RMSE is an external performance metric obtained with closed-loop estimator dynamics, not a self-consistent fit. The derivation chain therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- controller and observer gains
- concurrent learning rates
axioms (2)
- domain assumption Quadrotor and payload states evolve on the product manifold of SE(3) copies with cable length constraints.
- domain assumption Local cable tension and direction measurements are accurate enough to support independent load-share estimation whose sum equals total payload weight.
Reference graph
Works this paper leans on
-
[1]
Geometric tracking control of a quadrotor UA V on SE(3),
T. Lee, M. Leok, and N. H. McClamroch, “Geometric tracking control of a quadrotor UA V on SE(3),” inProc. IEEE Conf. Decision Control (CDC), 2010, pp. 5420–5425
2010
-
[2]
Geometric control and differential flatness of a quadrotor UA V with a cable-suspended load,
K. Sreenath, T. Lee, and V . Kumar, “Geometric control and differential flatness of a quadrotor UA V with a cable-suspended load,” inProc. IEEE Conf. Decision Control (CDC), 2013, pp. 2269–2274
2013
-
[3]
Geometric control of quadrotor UA Vs transporting a cable- suspended rigid body,
T. Lee, “Geometric control of quadrotor UA Vs transporting a cable- suspended rigid body,”IEEE Trans. Control Syst. Technol., vol. 26, no. 1, pp. 255–264, 2018
2018
-
[4]
A geometric control approach for multi- UA V cooperative payload transfer,
M. Sharma and S. Sundaram, “A geometric control approach for multi- UA V cooperative payload transfer,”Nonlinear Dynamics, vol. 111, pp. 10 077–10 096, 2023
2023
-
[5]
Agile and cooperative aerial manipulation of a cable-suspended load,
S. Sun, X. Wang, D. Sanalitro, A. Franchi, M. Tognon, and J. Alonso- Mora, “Agile and cooperative aerial manipulation of a cable-suspended load,”Science Robotics, 2025, arXiv:2501.18802
-
[6]
Differential geometric approach to trajectory planning: Cooperative transport by a team of autonomous marine vehicles,
H. Hajieghrary, D. Kularatne, and M. A. Hsieh, “Differential geometric approach to trajectory planning: Cooperative transport by a team of autonomous marine vehicles,” in2018 Annual American Control Con- ference (ACC), 2018, pp. 858–863
2018
-
[7]
B. Wang, R. Huang, and L. Zhao, “Auto-multilift: Distributed learning and control for cooperative load transportation with quadrotors,” 2024, arXiv:2406.04858
-
[8]
Concurrent learning for convergence in adaptive control without persistency of excitation,
G. Chowdhary and E. Johnson, “Concurrent learning for convergence in adaptive control without persistency of excitation,” inProc. IEEE Conf. Decision Control (CDC), 2010, pp. 3674–3679
2010
-
[9]
Concurrent learning adaptive control of linear systems with exponentially convergent bounds,
G. Chowdhary, M. Muhlegg, J. P. How, and F. Holzapfel, “Concurrent learning adaptive control of linear systems with exponentially convergent bounds,”Int. J. Adaptive Control Signal Process., vol. 27, no. 4, pp. 280–301, 2013
2013
-
[10]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,”IEEE Trans. Autom. Control, vol. 62, no. 8, pp. 3861–3876, 2017
2017
-
[11]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” inProc. European Control Conf. (ECC), 2019, pp. 3420–3431
2019
-
[12]
Robust safe control for nonlinear quadrotor with a cable-suspended payload systems via control barrier function and disturbance estimator,
B. Yang and L. Xie, “Robust safe control for nonlinear quadrotor with a cable-suspended payload systems via control barrier function and disturbance estimator,”Control Engineering Practice, vol. 156, p. 106158, 2025
2025
-
[13]
Dynamics of towed payload system using multiple aero- dynamic surfaces,
P. Williams, “Dynamics of towed payload system using multiple aero- dynamic surfaces,” inProc. AIAA Guidance, Navigation, and Control Conf., 2009
2009
-
[14]
Quaternion kinematics for the error-state Kalman filter
J. Solà, “Quaternion kinematics for the error-state Kalman filter,”arXiv preprint arXiv:1711.02508, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[15]
Leveson,Engineering a Safer World: Systems Thinking Applied to Safety
N. Leveson,Engineering a Safer World: Systems Thinking Applied to Safety. MIT Press, 2011
2011
-
[16]
Challenges in autonomous vehicle safety assurance,
P. Koopman and M. Wagner, “Challenges in autonomous vehicle safety assurance,”IEEE Intelligent Transportation Systems Magazine, vol. 9, no. 1, pp. 4–18, 2017
2017
-
[17]
Guo and Z.-L
B.-Z. Guo and Z.-L. Zhao,Active Disturbance Rejection Control for Nonlinear Systems: An Introduction. John Wiley & Sons, 2013
2013
-
[18]
H. K. Khalil,Nonlinear Systems, 3rd ed. Prentice Hall, 2002
2002
-
[19]
High-order control barrier functions,
W. Xiao, C. Belta, and C. G. Cassandras, “High-order control barrier functions,”IEEE Trans. Autom. Control, vol. 67, no. 7, pp. 3655–3662, 2022
2022
-
[20]
Drake: Model- based design and verification for robotics,
R. Tedrake and the Drake Development Team, “Drake: Model- based design and verification for robotics,” 2024, available at https://drake.mit.edu. [Online]. Available: https://drake.mit.edu
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.