Sharp-Peak Functions for Exactly Penalizing Binary Integer Programming
Pith reviewed 2026-05-18 19:31 UTC · model grok-4.3
The pith
Sharp-peak functions reformulate binary constraints so that a penalty model shares the same global minimizers as the original problem when the penalty exceeds a fixed threshold.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By introducing sharp-peak functions, the binary constraints of UBIP are equivalently reformulated as equality constraints, leading to an SPF-constrained optimization problem. The associated penalty model has the property that its global minimizers coincide exactly with those of the original UBIP whenever the penalty parameter surpasses a threshold value that remains constant regardless of the solution set of UBIP.
What carries the argument
Sharp-peak functions (SPFs), which serve as a class of functions that equivalently reformulate binary constraints as equality constraints, enabling the exact penalty theory for the model.
If this is right
- The penalty model can be solved in place of the original constrained problem for sufficiently large penalties.
- The Sha-Peak algorithm based on inexact ADMM finds P-stationary points at a linear convergence rate or in finite steps.
- Optimality conditions are characterized using KKT points and P-stationarity for the penalty model.
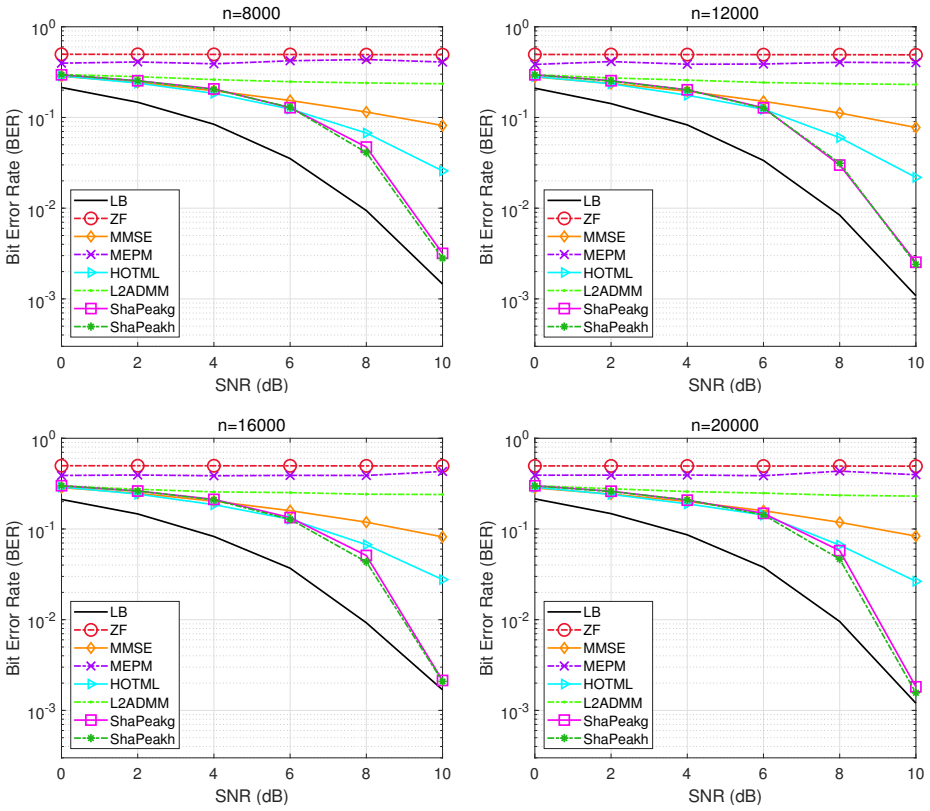
- Numerical performance is competitive with established solvers on tested instances.
Where Pith is reading between the lines
- This approach may allow direct application to other combinatorial problems with discrete variables by designing similar peak functions.
- The independence of the threshold from the solution set could simplify parameter tuning in practice compared to methods where thresholds depend on problem specifics.
- Extensions to nonconvex or larger-scale problems might be possible if the Lipschitz assumption holds locally.
Load-bearing premise
The gradient of the objective is locally Lipschitz continuous over a bounded box containing the relevant points.
What would settle it
Observe whether, for a specific UBIP instance and penalty parameter above the claimed threshold, the set of global minimizers of the penalty model differs from that of the original UBIP.
Figures







read the original abstract
Unconstrained binary integer programming (UBIP) is a challenging optimization problem due to the presence of binary variables. To address the challenge, we introduce a novel class of functions named sharp-peak functions (SPFs), which equivalently reformulate the binary constraints as equality constraints, giving rise to an SPF-constrained optimization. Rather than solving this constrained reformulation directly, we focus on its associated penalty model. The established exact penalty theory shows that the global minimizers of UBIP and the penalty model coincide when the penalty parameter exceeds a threshold, a constant independent of the solution set of UBIP. To analyze the penalty model, we introduce Karush-Kuhn-Tucker (KKT) points and a new type of stationarity, referred to as P-stationarity, and provide a comprehensive characterization of its optimality conditions. We then develop an efficient algorithm called Sha-Peak based on the inexact alternating direction method of multipliers. It converges toa P-stationary point at a linear rate or terminates at such a point within finitely many steps. These results are established under appropriate parameter choices and a single mild assumption, namely, the local Lipschitz continuity of the gradient over a bounded box. Finally, numerical experiments demonstrate its nice performance in comparison to several established solvers.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces sharp-peak functions (SPFs) to equivalently reformulate binary constraints in unconstrained binary integer programming (UBIP) as equality constraints. It applies established exact penalty theory to the resulting SPF-constrained problem, claiming that global minimizers of UBIP and the penalty model coincide once the penalty parameter exceeds a threshold independent of the solution set. The manuscript defines KKT points and introduces P-stationarity to characterize optimality conditions, then develops the Sha-Peak algorithm based on inexact ADMM, proving linear convergence or finite termination to a P-stationary point under local Lipschitz continuity of the gradient over a bounded box. Numerical experiments compare performance against established solvers.
Significance. If substantiated, the work offers a new exact-penalty reformulation for binary optimization that avoids dependence on the unknown solution set when selecting the penalty parameter. The mild assumption of local Lipschitz continuity and the linear convergence guarantee for Sha-Peak strengthen the algorithmic contribution. The SPF construction and P-stationarity notion provide fresh tools for analyzing penalized discrete problems, with potential impact on practical solvers for UBIP if the independence claim holds rigorously.
major comments (2)
- [Section 3 (penalty model and exact penalty analysis)] The abstract and introduction assert that the penalty threshold is a constant independent of the solution set of UBIP, derived from established exact penalty theory. However, without an explicit construction or bound expressed solely in terms of problem data (e.g., variable bounds, Lipschitz constant of the objective), it is unclear whether the threshold avoids implicit dependence on the unknown global minimizers; this is load-bearing for the central exact-penalty claim.
- [Section 5 (Sha-Peak algorithm and convergence theorem)] The convergence analysis of Sha-Peak (linear rate or finite termination) rests on local Lipschitz continuity of the gradient over a bounded box. The proof should explicitly relate the contraction factor to the penalty parameter and the Lipschitz constant to confirm the rate remains linear for the chosen parameters; otherwise the practical utility of the rate result is limited.
minor comments (3)
- [Abstract] Abstract contains the typo 'converges toa P-stationary'; correct to 'converges to a P-stationary'.
- [Abstract] The phrase 'nice performance' in the abstract is vague; replace with quantitative metrics such as solution accuracy, runtime, or success rate relative to the compared solvers.
- [Section 2 (SPF construction)] Ensure first-use definitions for all acronyms (UBIP, SPF, ADMM, KKT, P-stationarity) and clarify the precise mathematical form of the sharp-peak functions when they are introduced.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address each major comment below and have revised the paper to incorporate clarifications and explicit derivations where appropriate.
read point-by-point responses
-
Referee: [Section 3 (penalty model and exact penalty analysis)] The abstract and introduction assert that the penalty threshold is a constant independent of the solution set of UBIP, derived from established exact penalty theory. However, without an explicit construction or bound expressed solely in terms of problem data (e.g., variable bounds, Lipschitz constant of the objective), it is unclear whether the threshold avoids implicit dependence on the unknown global minimizers; this is load-bearing for the central exact-penalty claim.
Authors: We appreciate the referee's emphasis on this central claim. The independence from the solution set follows directly from the application of standard exact-penalty results (e.g., Theorem 2.1 in the referenced exact-penalty literature) to the SPF-constrained formulation: the threshold is determined by an upper bound on the norm of the multipliers associated with the SPF equality constraints, which in turn depends only on the Lipschitz constant of the objective over the bounded box and the uniform bound on the SPF gradients (which are independent of any particular minimizer). No knowledge of the global minimizers themselves enters the bound. To make this fully explicit and remove any potential ambiguity, we have added a new remark in Section 3 that constructs the threshold explicitly in terms of the problem data (Lipschitz constant L of f and the box bounds), confirming it is a constant that can be computed a priori without reference to the solution set. revision: yes
-
Referee: [Section 5 (Sha-Peak algorithm and convergence theorem)] The convergence analysis of Sha-Peak (linear rate or finite termination) rests on local Lipschitz continuity of the gradient over a bounded box. The proof should explicitly relate the contraction factor to the penalty parameter and the Lipschitz constant to confirm the rate remains linear for the chosen parameters; otherwise the practical utility of the rate result is limited.
Authors: We agree that an explicit expression for the contraction factor would strengthen the practical interpretation of the linear convergence result. The current proof already shows that, under the local Lipschitz assumption with constant L over the bounded box and for penalty parameter ρ chosen larger than a threshold depending on L, the inexact ADMM iteration contracts with a factor strictly less than one. We have revised the convergence theorem and its proof in Section 5 to derive the explicit contraction factor (of the form 1 - c/ρ for a positive constant c depending on L and the box), thereby confirming that the rate remains linear and the factor can be made arbitrarily small by increasing ρ within the admissible range. revision: yes
Circularity Check
No significant circularity detected
full rationale
The derivation relies on established exact penalty theory (external to the paper) to establish coincidence of global minimizers for the penalty model once the parameter exceeds a threshold independent of the UBIP solution set. Sharp-peak functions are constructed to equivalently reformulate binary constraints as equalities, after which the penalty model and its KKT/P-stationarity analysis follow directly; the Sha-Peak algorithm convergence is proved under the single mild external assumption of local Lipschitz continuity of the gradient on a bounded box. No step reduces by definition or self-citation to its own inputs, no fitted parameter is relabeled as a prediction, and the central claims remain independent of the paper's own constructions.
Axiom & Free-Parameter Ledger
free parameters (1)
- penalty threshold
axioms (1)
- domain assumption local Lipschitz continuity of the gradient over a bounded box
invented entities (2)
-
sharp-peak functions
no independent evidence
-
P-stationarity
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
sharp-peak function (SPF) ... g(x)⩾0 and g(x)=0 if and only if x∈{0,1} ... |ν|⩾c ∀ν∈∂g(x) ... exact penalty theorem ... μ:=max∥∇f(x)∥∞/c ... independent of the solution set
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
P-stationary point ... ProxB_τμφ ... linear convergence under local Lipschitz continuity of ∇f on a bounded box
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
M. F. Anjos and J. B. Lasserre. Handbook on semidefinite, conic and polynomial optimization , volume 166. Springer Science & Business Media, 2011
work page 2011
-
[2]
E. Ba¸ s. Binary aquila optimizer for 0–1 knapsack problems. Engineering Applications of Artificial Intelligence, 118:105592, 2023
work page 2023
-
[3]
C. Buchheim, M. Montenegro, and A. Wiegele. SDP-based branch-and-bound for non-convex quadratic integer optimization. Journal of Global Optimization , 73:485–514, 2019
work page 2019
-
[4]
C. Buchheim and A. Wiegele. Semidefinite relaxations for non-convex quadratic mixed-integer programming. Mathematical Programming, 141:435–452, 2013. 33
work page 2013
- [5]
-
[6]
C. Chen, R. Chen, T. Li, R. Ao, and Z. Wen. Monte carlo policy gradient method for binary optimization, 2023
work page 2023
-
[7]
T. Cour and J. Shi. Solving markov random fields with spectral relaxation. In Artificial Intelligence and Statistics , pages 75–82. PMLR, 2007
work page 2007
-
[8]
M. De Santis and F. Rinaldi. Continuous reformulations for zero–one programming problems. Journal of Optimization Theory and Applications , 153:75–84, 2012
work page 2012
-
[9]
M. Esmaeilpour, P. Cardinal, and A. L. Koerich. A robust approach for securing audio classifi- cation against adversarial attacks. IEEE Transactions on Information Forensics and Security, 15:2147–2159, 2019
work page 2019
-
[10]
M. R. Garey and D. S. Johnson. Computers and intractability , volume 29. wh freeman New York, 2002
work page 2002
-
[11]
C. Helmberg and F. Rendl. A spectral bundle method for semidefinite programming. SIAM Journal on Optimization , 10(3):673–696, 2000
work page 2000
- [12]
- [13]
-
[14]
T. Joachims et al. Transductive inference for text classification using support vector machines. In International Conference on Machine Learning , volume 99, pages 200–209, 1999
work page 1999
-
[15]
G. Kochenberger, J.-K. Hao, F. Glover, M. Lewis, Z. L¨ u, H. Wang, and Y. Wang. The unconstrained binary quadratic programming problem: A survey. Journal of Combinatorial Optimization, 28:58–81, 2014
work page 2014
-
[16]
N. Komodakis and G. Tziritas. Approximate labeling via graph cuts based on linear program- ming. IEEE Transactions on Pattern Analysis and Machine Intelligence , 29(8):1436–1453, 2007
work page 2007
-
[17]
J. B. Lasserre. A max-cut formulation of 0/1 programs.Operations Research Letters, 44(2):158– 164, 2016
work page 2016
-
[18]
H. Liu, K. Deng, H. Liu, and Z. Wen. An entropy-regularized ADMM for binary quadratic programming. Journal of Global Optimization , 87(2):447–479, 2023
work page 2023
-
[19]
S. L. Loyka. Channel capacity of MIMO architecture using the exponential correlation matrix. IEEE Communications letters , 5(9):369–371, 2001
work page 2001
-
[20]
R. Merkle and M. Hellman. Hiding information and signatures in trapdoor knapsacks. IEEE Transactions on Information Theory , 24(5):525–530, 1978. 34
work page 1978
-
[21]
J. J. Mor´ e and D. C. Sorensen. Computing a trust region step. SIAM Journal on Scientific and Statistical Computing , 4(3):553–572, 1983
work page 1983
-
[22]
W. Murray and K.-M. Ng. An algorithm for nonlinear optimization problems with binary variables. Computational Optimization and Applications , 47(2):257–288, 2010
work page 2010
- [23]
-
[24]
J.-S. Pan, P. Hu, V. Sn´ avsel, and S.-C. Chu. A survey on binary metaheuristic algorithms and their engineering applications. Artificial Intelligence Review, 56(7):6101–6167, 2023
work page 2023
-
[25]
H. Qin, R. Gong, X. Liu, X. Bai, J. Song, and N. Sebe. Binary neural networks: A survey. Pattern Recognition, 105:107281, 2020
work page 2020
-
[26]
M. Raghavachari. On connections between zero-one integer programming and concave pro- gramming under linear constraints. Operations Research, 17(4):680–684, 1969
work page 1969
-
[27]
R. T. Rockafellar and R. J.-B. Wets. Variational analysis, volume 317. Springer Science & Business Media, 2009
work page 2009
-
[28]
M. Shao and W.-K. Ma. Binary MIMO detection via homotopy optimization and its deep adaptation. IEEE Transactions on Signal Processing , 69:781–796, 2020
work page 2020
- [29]
- [30]
-
[31]
H. Wang, Y. Shao, S. Zhou, C. Zhang, and N. Xiu. Support vector machine classifier via l0/1 soft-margin loss. IEEE Transactions on Pattern Analysis and Machine Intelligence , 44(10):7253–7265, 2021
work page 2021
-
[32]
P. Wang, C. Shen, A. van den Hengel, and P. H. Torr. Large-scale binary quadratic optimiza- tion using semidefinite relaxation and applications. IEEE Transactions on Pattern Analysis and Machine Intelligence , 39(3):470–485, 2016
work page 2016
-
[33]
S. Weerasinghe, T. Alpcan, S. M. Erfani, and C. Leckie. Defending support vector machines against data poisoning attacks. IEEE Transactions on Information Forensics and Security , 16:2566–2578, 2021
work page 2021
-
[34]
Z. Wen, D. Goldfarb, and W. Yin. Alternating direction augmented Lagrangian methods for semidefinite programming. Mathematical Programming Computation, 2(3):203–230, 2010
work page 2010
-
[35]
H. Wolkowicz, R. Saigal, and L. Vandenberghe.Handbook of semidefinite programming: theory, algorithms, and applications , volume 27. Springer Science & Business Media, 2012
work page 2012
- [36]
-
[37]
X. Yang, Z. Song, I. King, and Z. Xu. A survey on deep semi-supervised learning. IEEE Transactions on Knowledge and Data Engineering , 35(9):8934–8954, 2022
work page 2022
-
[38]
Sparsity Constrained Minimization via Mathematical Programming with Equilibrium Constraints
G. Yuan and B. Ghanem. Sparsity constrained minimization via mathematical programming with equilibrium constraints. arXiv preprint arXiv:1608.04430 , 2016
work page internal anchor Pith review Pith/arXiv arXiv 2016
-
[39]
G. Yuan and B. Ghanem. An exact penalty method for binary optimization based on MPEC formulation. In Proceedings of the AAAI Conference on Artificial Intelligence , volume 31, 2017
work page 2017
- [40]
-
[41]
S. Zhou, L. Pan, N. Xiu, and H.-D. Qi. Quadratic convergence of smoothing Newton’s method for 0/1 loss optimization. SIAM Journal on Optimization , 31(4):3184–3211, 2021. 36
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.