Scene-agnostic ALS boresight self-calibration
Pith reviewed 2026-06-26 08:47 UTC · model grok-4.3
The pith
Boresight calibration for airborne laser scanners can use automatic point matches from normal overlapping flight strips instead of dedicated patterns over special scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
For INS/GNSS trajectories of sufficient quality, boresight calibration can be performed without particular scene prerequisites during routine mapping operations using a minimum of 3-4 overlapping strips. This is achieved by replacing plane-based constraints with scene-agnostic point-to-point correspondences extracted automatically from overlapping ALS strips, using either a parametric adjustment or a factor-graph formulation.
What carries the argument
scene-agnostic point-to-point correspondences from overlapping ALS strips, used in either a parametric adjustment with INS/GNSS trajectory or a factor-graph treating GNSS and raw inertial data
If this is right
- Traditional plane-based methods are limited to calibration scenarios and fail in routine mapping geometry.
- The lightweight parametric formulation suffices for boresight recovery with tactical and navigation grade inertial sensors.
- The general factor-graph approach is superior when inertial sensor errors are less observable within an optimal smoother.
- Calibration becomes feasible in conventional mapping geometry with 3-4 overlapping strips.
Where Pith is reading between the lines
- Operational costs could decrease by eliminating separate calibration flights in ALS mapping projects.
- The method might extend to other sensor calibrations that rely on trajectory quality and strip overlaps.
- Future work could test integration with simultaneous localization and mapping techniques for even less structured environments.
Load-bearing premise
The automatic extraction of reliable point-to-point correspondences from overlapping ALS strips must be accurate enough, and the INS/GNSS trajectory quality must be sufficient for boresight effects to be observable.
What would settle it
Extract point correspondences from overlapping strips in a standard mapping flight and run the adjustment; if the estimated boresight angles deviate significantly from independently verified values or the solution fails to converge, the claim does not hold.
Figures
read the original abstract
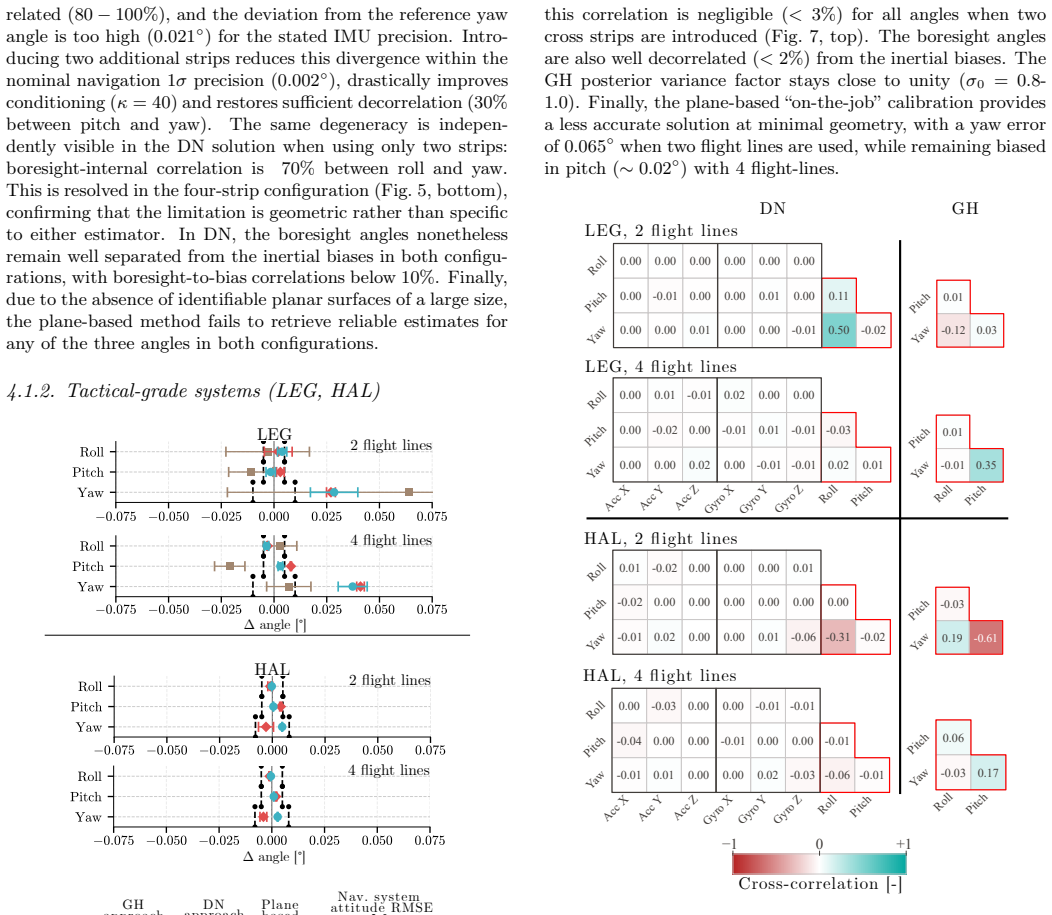
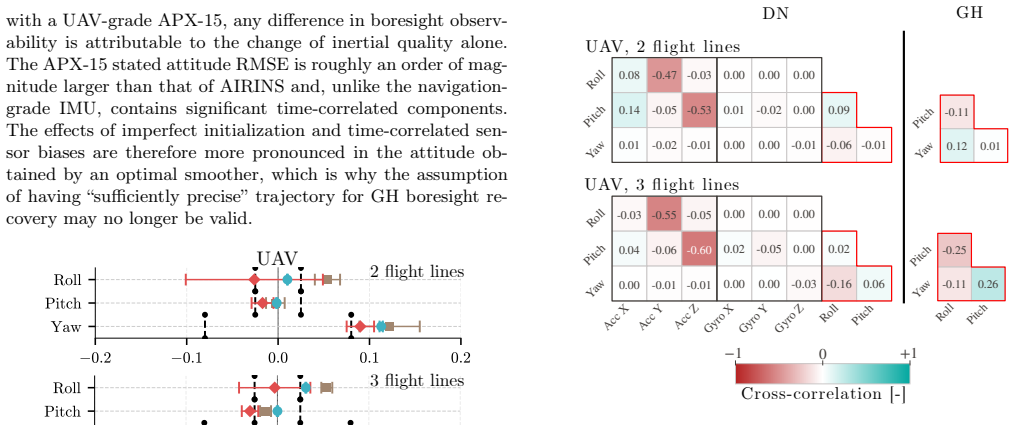
ALS boresight calibration has relied for two decades on dedicated flight patterns over structured scenes containing planar surfaces of varied aspect and slope. While reliable, this approach imposes constraints on the scene content and operations, which limits its applicability to boresight recovery within routine mapping missions. We present a practical approach that substantially relaxes these requirements by replacing plane-based constraints with scene-agnostic point-to-point correspondences extracted automatically from overlapping ALS strips. Two complementary formulations are proposed to estimate boresight with laser vector observations: (i) a simpler parametric adjustment utilizing INS/GNSS trajectory; (ii) a rigorous formulation treating GNSS and raw inertial data within an existing factor-graph, i.e. a dynamic network, where boresight is added as an additional parameter. Both formulations are evaluated across four operational ALS flights equipped with five inertial systems, covering a wide range of flight altitudes, overlap geometries, terrain types and inertial sensor classes. The analysis draws a clear boundary between the legacy plane-based conditioning that falls short outside the calibration scenario and the proposed formulations, which either recover or absorb boresight effects under conventional mapping geometry. Among them, the lightweight formulation is sufficient for boresight recovery using tactical and navigation grade inertial sensors, while the general factor-graph approach is clearly superior when the inertial sensor errors are less observable within an optimal smoother. This supports the hypothesis that, for INS/GNSS trajectory of sufficient quality, the boresight calibration can be performed without particular scene prerequisites during routine mapping operations using a minimum of 3-4 overlapping strips, with either proposed formulation...
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes two formulations for ALS boresight self-calibration that replace traditional plane-based constraints with scene-agnostic point-to-point correspondences automatically extracted from overlapping strips. The first is a lightweight parametric adjustment that uses the INS/GNSS trajectory; the second is a rigorous factor-graph formulation that incorporates raw inertial observations and adds boresight as an additional parameter. Both are evaluated on four operational flights equipped with five inertial systems spanning varied altitudes, overlaps, terrains, and sensor grades, showing that the proposed methods recover or absorb boresight effects under standard mapping geometry while legacy plane-based methods do not.
Significance. If the central claim holds, the work enables boresight calibration during routine mapping flights without dedicated calibration patterns or structured scenes, using only 3-4 overlapping strips when INS/GNSS trajectory quality is adequate. The multi-flight, multi-sensor evaluation on real operational data supplies concrete empirical grounding for the performance boundary between legacy and proposed approaches and directly tests the scene-agnostic setting.
minor comments (2)
- The abstract states that correspondences are 'extracted automatically' but does not specify the extraction algorithm or provide quantitative validation metrics (e.g., inlier rates or residual distributions) that would allow readers to assess the reliability of the input observations used in both formulations.
- Section describing the factor-graph formulation would benefit from an explicit statement of how the boresight rotation is parameterized (e.g., small-angle approximation or full SO(3) representation) and how it is initialized within the dynamic network.
Simulated Author's Rebuttal
We thank the referee for the positive assessment, detailed summary of the contributions, and recommendation for minor revision. No major comments were provided in the report.
Circularity Check
No significant circularity detected
full rationale
The paper's central claim rests on two formulations for estimating boresight from automatically extracted point-to-point correspondences in overlapping ALS strips, evaluated directly on four real operational flights with five inertial systems across varied conditions. No equations, parameters, or results are shown to reduce by construction to a fitted input defined in terms of the target quantity itself, nor does any load-bearing step rely on a self-citation chain that is unverified or self-referential. The evaluations on external flight data provide independent empirical support, rendering the derivation self-contained against the stated assumptions without circular reduction.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Point-to-point correspondences can be automatically extracted from overlapping ALS strips with sufficient accuracy for boresight estimation
- domain assumption INS/GNSS trajectory of sufficient quality makes boresight effects observable
Reference graph
Works this paper leans on
-
[1]
2013 , keywords =
Association for unmanned vehicle systems international , title =. 2013 , keywords =
2013
-
[2]
, title =
Ackermann, F. , title =. The Photogrammetric Record , year =
-
[3]
2002 , keywords =
Administration, Department of Transportation Federal Aviation , title =. 2002 , keywords =
2002
-
[4]
Akhtman, Y. and Garg, A. and Skaloud, J. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , timestamp =. doi:10.5194/isprsarchives-XXXVIII-1-C22-235-2011 , volume =
work page doi:10.5194/isprsarchives-xxxviii-1-c22-235-2011 2011
-
[5]
and Luo, M
Akos, D. and Luo, M. and Pullen, S. and Enge, P. , title =. GPS World , year =
-
[6]
Ali, J. , title =. IET Science, Measurement and Technology , year =. doi:10.1049/iet-smt.2009.0065 , keywords =
-
[7]
Allen, J. J. and Kinney, R. D. and Sarsfield, Daily, M. R. and Ellis, J. R. and Smith, J. H. and Montague, S. and Howe, R. T. and Boser, B. E. and Horowitz, R. and Pisano, A. P. and Lemking, M. A. and Clark, W. A. and Juneau, T. , title =. IEEE AES System Magazine , year =
-
[8]
and Jia, H
Allerton, D.J. and Jia, H. , title =. The Journal of Navigation , year =
-
[9]
and Martinelli, A
Altermatt, K. and Martinelli, A. and Tomatis, N. and Siegwart, R. , title =. Proceedings of the interation conference on intelligent robots and systems , year =
-
[10]
, title =
Amiri-Smikooei, A.R. , title =. Journal of Geodesy , year =
-
[11]
Bilger, H.R
Andersson, R. Bilger, H.R. and Stedman, G.E. , title =. Am. J. of Phys. , year =
-
[12]
and Colomina, I
Angelats, E. and Colomina, I. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[13]
and Mierle K
Argawal, S. and Mierle K. and Others , title =
-
[14]
, year =
Bäumker, Manfred and Heimes, F. , year =. New Calibration and Computing Method for Direct Georeferencing of Image and Scanner Data Using the Position and Angular Data of an Hybrid Inertial Navigation System , journal =
-
[15]
and Lichti, D
Bae, K. and Lichti, D. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[16]
, title =
Bak, T. , title =. 1999 , note =
1999
-
[17]
and Molinari, R
Balamuta, J. and Molinari, R. and Guerrier, S. and Skaloud, J. , title =. ION GNSS+ , year =
-
[18]
, title =
Baltsavias, E.P. , title =. ISPRS Journal of Photogrammetry and Remote Sensing , year =
-
[19]
and Lachapelle, G
Bancroft, J.B. and Lachapelle, G. , title =. Sensors , year =
-
[20]
, title =
Bar-Itzhack, I.Y. , title =. Journal of Guidance, Control and Dynamics , year =
-
[21]
I. Y. Bar-Itzhack and R. Harman , title =. AIAA GNC Conference Exhibit, Paper AIAA 2004-5343 , year =
2004
-
[22]
2017 , author =
State estimation for robotics , publisher =. 2017 , author =
2017
-
[23]
and Tome, P
Bastos, L. and Tome, P. and Cunha, T. and Cunha, S. , title =. The International Association of Geodesy Symposia Serie , year =
-
[24]
Bayoud, F. and Skaloud, J. , title =. Journal of Applied Geodesy , year =. doi:10.1515/JAG.2008.005 , volume =
-
[25]
J. K. Bekkeng , title =. IEEE Transaction on Instrumentation and Measaurements , year =
-
[26]
, title =
Beran, T. , title =. GNSS 2005 , year =
2005
-
[27]
and Kim, D
Beran, T. and Kim, D. and Langley, R. , title =. ION GPS GNSS , year =
-
[28]
2000 , author =
Computational geometry , publisher =. 2000 , author =
2000
-
[29]
Betz, J. W. , date =. Engineering satellite-based navigation and timing , isbn =
-
[30]
and Rekow, A
Bevly, D.M. and Rekow, A. and Parkinson, B. , title =. NAVIGATION: Journal of The Institute of Navigation , year =
-
[31]
, title =
Bjerhammar, A. , title =
-
[32]
and Colomina, I
Blazquez, M. and Colomina, I. , title =. ISPRS Journal of Photogrammetry and Remote Sensing , year =
-
[33]
1997 , author =
A first course in geometric topology and differential geometry , publisher =. 1997 , author =
1997
-
[34]
2001 , author =
Dynamic Equations on Time Scales , publisher =. 2001 , author =
2001
-
[35]
2002 , author =
Spline Toolbox User's Guide , publisher =. 2002 , author =
2002
-
[36]
2001 , author =
A practical guide to splines , publisher =. 2001 , author =
2001
-
[37]
Botteron, C. and Dawes, N. and Leclere, J. and Skaloud, J. and Weijs, S.V. , title =. Remote Sensing , year =. doi:https://dx.doi.org/10.3390/rs5073516 , keywords =
-
[38]
, volume =
Braasch, M.S. , volume =. Global Positioning System: Theory and Applications , publisher =. The Global Positioning System - Therory and Application , keywords =. 1996 , editor =
1996
-
[39]
and Van Dierendonck, A.J
Braasch, M. and Van Dierendonck, A.J. , title =. Proceedings of the IEEE, Vol , keywords =
-
[40]
Broatch, S. A. and Henley, A. J. , title =. IEEE , keywords =
-
[41]
, title =
Brown, D.C. , title =. Photogrammetric Engineering , year =
-
[42]
and Niebauer, T
Brown, J.M. and Niebauer, T. and Klingele T.M. , title =. IAG Sypmpsia Series 123: Gravity, Geoid and Geodynamics 2000 , year =
2000
-
[43]
and Keenan, R
Brown, N. and Keenan, R. and Richter, B. and Toryer, L. , title =. GNSS 2005 , year =
2005
-
[44]
and Peters, M.F
Brozena, J.M. and Peters, M.F. and Salman, R. , title =. IAG Sypmposia GRAGEOMAR , year =
-
[45]
and Glennie, C.L
Bruton, A.M. and Glennie, C.L. and Schwarz, K.P. , title =. GPS Solutions , year =
-
[46]
and Kern, M
Bruton, A.M. and Kern, M. and Schwarz, K.P. and Ferguson, S. and Simsky, A. and Tennant, K. and Wei, M. and Halpenny, J. and Langley, R. and Beran, T. and Keller, K. and Mrstik, P. and Kusevic, K. and Faulkner, R. , title =. Geomatica , year =
-
[47]
and Sukkarieh, S
Bryson,M. and Sukkarieh, S. , title =. Australian conference on robotics and automation , year =
-
[48]
, date =
Burman, H. , date =. Calibration and orientation of airborne image and laser scanner data using GPS and INS , keywords =
-
[49]
, title =
Burrell, J. , title =
-
[50]
and Hajiyev, C.M
Caliskan, F. and Hajiyev, C.M. , title =. Proceedings of the 38th Conference on Decision 81 Control , year =
-
[51]
and Lachapelle, G
Cannon, M.E. and Lachapelle, G. and Szarmes, G. and Hebert, M.C. and Keith, J.M. and Jokerst, J. , title =. NAVIGATION: Journal of The Institute of Navigation , year =
-
[52]
and Harding, D.J
Carabajal, C.C. and Harding, D.J. and Luthcke and S.B. Fong, W. and Rowton, S.C. and Frawley, J.J. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[53]
Carlson, N. A. , title =. National Aerospace Electronics Conference , year =
-
[54]
Carlson, N. A. , title =
-
[55]
, title =
Ceriani, S. , title =. 2012 , note =
2012
-
[56]
and Tsui, J
Chakravarthy, V. and Tsui, J. and Lin, D. and Schamus, J. , title =. GPS Solutions , year =
-
[57]
and Chapman, M
Chaplin, B. and Chapman, M. A. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[58]
2004 , author =
Fundamentals of High Accuracy Inertial Navigation , publisher =. 2004 , author =
2004
-
[59]
and Freyer, J.G
Clarke, T.A. and Freyer, J.G. and Wang, X. , title =. Photogrammetric Record , year =
-
[60]
and Rehak, M
Clausen, P. and Rehak, M. and Skaloud, J. , title =. 36te Dreil\". 2016 , publisher =
2016
-
[61]
and Skaloud, J
Clausen, P. and Skaloud, J. and Gilli\'. Position accuracy with redundant MEMS IMU for road applications , journal =. 2015 , volume =
2015
-
[62]
Clausen, P. and Skaloud, J. and Molinari, R. and Balamuta, J. and Guerrier, S. , title =. 2017 IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace) , year =. doi:https://dx.doi.org/10.1109/MetroAeroSpace.2017.7999598 , journal =
-
[63]
Clausen, P. and Skaloud, J. and Molinari, R. and Lee, J. and Guerrier, S. , title =. IEEE AEROSPACE AND ELECTRONIC SYSTEMS MAGAZINE , year =. doi:http://dx.doi.org/10.1109/MAES.2018.170153 , owner =
-
[64]
and Skaloud, J
Clausen, P. and Skaloud, J. and Orso, S. and Guerrier, S. , title =. IEEE/ION Position, Location and Navigation Symposium (PLANS) , year =
-
[65]
and Langley, R.B
Collins, J.P. and Langley, R.B. , title =. ION GPS , year =
-
[66]
, title =
Colomina, I. , title =. Photogrammetric Week , year =
-
[67]
, title =
Colomina, I. , title =. XVIIth ISPRS Congress, Washington DC, USA , year =
-
[68]
, title =
Colomina, I. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[69]
and Blazquez, M
Colomina, I. and Blazquez, M. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[70]
and Gimenez, M
Colomina, I. and Gimenez, M. and Rosales, J.J. and Wis, M. and Gomez, A. and Miguelsanz, P. , title =. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. , year =
-
[71]
and Miranda, Ch
Colomina, I. and Miranda, Ch. and Pares, M.E. and Silva, P.F. and Sivla, J.S. and Peres, T , title =. GPS World , year =
-
[72]
and Molina, P
Colomina, I. and Molina, P. , title =. ISPRS Journal of Photogrammetry and Remote Sensing , year =
-
[73]
2014 , owner =
European Commission , title =. 2014 , owner =
2014
-
[74]
and Waegli, A
Constantin, V. and Waegli, A. and Skaloud, J. , title =. G\'. 2008 , volume =
2008
-
[75]
, title =
Cosandier, D. , title =. 1999 , type =
1999
-
[76]
, title =
Cramer, M. , title =. ISPRS Journal of Photogrammetry & Remote Sensing , year =
-
[77]
, title =
Cramer, M. , title =. 2004 , month =
2004
-
[78]
and Stallmann, D
Cramer, M. and Stallmann, D. , title =. Photogrammetric Computer Vision, ISPRS Commission III Symposium , year =
-
[79]
and Beck, N
Craymer, M.R. and Beck, N. , title =. ION GPS , year =
-
[80]
2014 , owner =
Cucci, Davide Antonio , title =. 2014 , owner =
2014
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.